电控永磁吸盘研究进展
2010-01-13王青青李裕迪方燕云胡锦莲李志刚
王青青,李裕迪,方燕云,陈 跃,胡锦莲,李志刚*
(1.台州学院 物理与电子工程学院,浙江 台州 318000;2.安徽工业大学 材料工程学院,安徽 马鞍山 243002)
电控永磁吸盘研究进展
王青青1,李裕迪1,方燕云1,陈 跃1,胡锦莲2,李志刚*1
(1.台州学院 物理与电子工程学院,浙江 台州 318000;2.安徽工业大学 材料工程学院,安徽 马鞍山 243002)
电控永磁吸盘由于吸力强、安全系数高、操作方便、节能等优点,在模具加工、机械搬运和电磁机器人等方面有广泛的应用。总结了目前电控永磁吸盘磁路结构设计、电路优化和应用等方面的研究进展,提出两个亟待解决的关键问题。
永磁吸盘;充磁;退磁
1 引言
19世纪末美国WALKER公司制造了电磁吸盘[1,2],在一百多年的历史中,极大地减少了加工辅助时间。但随着应用范围的扩大,电磁吸盘耗能大(例如一个吸力16t的吸盘需要电力约10kw)、断电失磁等一系列问题开始显现。20世纪30年代铝镍钴永磁材料问世,法国BRAILLON公司开始把此材料应用到吸盘上,在耗能、热形变、安全系数等方面,与传统电磁吸盘相比都有了很大的提高,但其控制系统依然采用手柄操作,给吊运大型模块方面带来了不便。后来,意大利泰磁公司用磁差原理制造了电控永磁吸盘,该吸盘采用电脉冲控制,通电时间短,能耗低,发热量小,安全系数高,不存在断电失磁引起工件掉落的危险[3-6]。
近年来,随着稀土永磁材料的快速发展,尤其是钕铁硼永磁材料,其低廉的价格,优异的磁性能,大大增强了电控永磁吸盘的吸力,提高了其安全性,促进了永磁吸盘的应用[7-11]。目前电控永磁吸盘已广泛应用于仓库和作业现场的钢材起重搬运、模具加工等众多领域。本文就电控永磁吸盘磁、电路的设计,以及其应用拓展等方面的研究进展进行综述。
2 磁路设计
2.1 磁路设计原理
永磁吸盘磁路设计通常采用两种不同的磁性材料作为主要磁体,一种为高矫顽力的永磁材料(如钕铁硼)作为主磁体,另一种为中等矫顽力的磁钢材料(如钴镍铝等)作为可逆磁体,利用两种磁体之间的磁轭(一般为45号钢)组成磁路,再通过对励磁线圈中脉冲电流的产生的电磁场,改变可逆磁体的磁场方向,实现对吸盘内部磁路的控制与转换,从而达到对外消磁(DEMAG)或充磁(MAG)[12,13],具体的工作过程如图1所示。当励磁线圈受正向激励后,可逆磁体的极性方向如图1a所示,则主磁体和可逆磁体都有磁通流出,通过外部工件构成外通路,永磁吸盘处于充磁状态;当励磁线圈受负向激励后,可逆磁体的极性方向反向,如图1b所示,主磁体与可逆磁体构成内通路,对外无磁通流出,外部工件无磁通通过,因而处于无磁力状态,永磁吸盘处于退磁状态[3]。
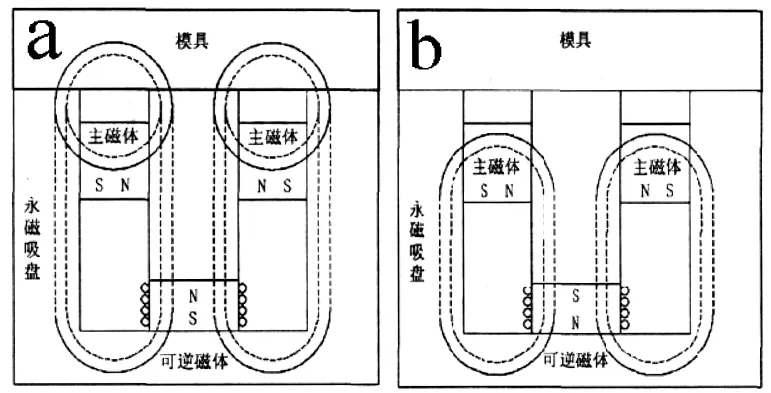
图1 永磁吸盘充、消磁过程:a充磁;b消磁Fig.1 Magnetizing and demagnetization for permanent magnet chunk a magnetizing;b demagnetization
2.2 磁吸力
永磁吸盘磁吸力大小及稳定性,是永磁吸盘的核心部分,也是早期研究的重点。电控永磁吸力大小的计算,可由麦克斯韦公式推导得出,气隙磁通密度均匀时永磁吸力为:

式中F为磁吸力,Bg为气隙磁通密度,φg为气隙磁通,Ag为磁极面积,μ0是真空磁导率。
由公式(1)可知,磁吸力大小与磁通的平方成正比,与磁极的面积成反比。永磁吸盘磁通的强弱取决于主磁体的硬磁性能,为了增强磁通,人们采用钕铁硼材料来代替传统的氧化铁或铝镍钴,并使得永磁吸盘的吸力得到大幅提高[8]。此外,谢祖荣等人[5]还提出了一种聚磁技术,即在永磁体磁极附加一个面积减小的导磁极头,在磁通不变的情况下可有效增强磁通密度,从而提高永磁吸盘的磁吸力[5]。
随着永磁吸盘吸力的增强及其应用的不断拓展,人们对其又提出了更高的要求,即磁通的均匀度问题。由公式(1)可知,磁吸力与磁通密度平方成正比,而永磁吸盘中心磁通密度低,两边密度高,导致吸盘磁吸力分布及其不均匀,中心区域与边缘区域每平方厘米的磁吸力往往相差数百倍甚至上万倍,这让永磁吸盘在某些方面的应用(如模具换模等)存在安全隐患。对此,Weiker公司对永磁吸盘结构进行了改进,采用多组磁极组合成一个大的永磁吸盘,相邻磁极间磁性相反,如图2所示。N、S磁极相邻排列,磁感线束从S磁极通过工件回到N磁极,形成闭合回路,而且前后方向磁束成横向排列,左右方向磁束成纵向排列,多个单元集合后,工件与磁极之间就由密集的磁束捆绑在一起,由此产生强大的吸力[8],每平方厘米平均吸力可高达150 N。

图2 永磁吸盘示意图Fig.2 Schematic of permanent magnet chuck
徐志峰等人[13]进一步研究发现,磁体的排列方式及各磁体间距也是影响磁吸力的重要因素。永磁体的位置应尽量靠近气隙,距离越近越有利于改善永磁体磁场的分布,减少漏磁,气隙磁场分布将更趋均匀。若仅改变永磁体的排列而其他条件不变,起吊的重量在磁体均布的条件下可提高1倍以上。同时就磁体间距与磁吸力进行了实验,在各磁体间距趋小的情况下,气隙场的分布更趋均匀,起吊重量越大[13-16]。
2.3 结构设计
合理设计磁路结构,不仅可以减少漏磁,增强吸力,提高磁通分布的均匀度,而且还可以改变磁力穿透深度,以完成某种特殊的用途。如张玉维等人[1]提出了两套磁路设计方案(见图3):第一种主磁体与可逆磁体水平布置,主磁体与可逆磁体都布置在同一水平面,从三维空间上看,励磁时磁通为上下方向,退磁时磁通为水平方向,此方案适合长宽大而高度受限制的吸盘,见图3a;第二种主磁体与可逆磁体上下布置,这种布置在励磁与退磁时磁通方向在三维坐标中保持一致,适合在高度方向不受限制,而在长宽方向受限的场合,见图3b。同过对主磁体和可逆磁体相对位置的调节,可有效控制永磁吸盘磁力穿透深度,这在某些工件操控中具有重要的应用。例如,钢板的调运中,通过改变磁通穿透深度,永磁吸盘可只吸附一层钢板,而不影响第二层钢板。

图3 磁路设计方案:主磁体与可逆磁体a水平放置,b上下放置。1主磁体,2可逆磁体,3线圈,4磁轭Fig.3 main magnetic and reversible magnetic design:a horizontal;b vertically.1 main magnetic,2 reversible magnetic,3 coil,4 magnetic yoke
永磁吸盘由于含有磁路和电路两个部分,往往自重较大。谢祖荣等人[5]针对永磁吸盘的自重,设计了一种能够依靠自重来改变二磁系(主磁体和可逆磁体)相对位置的永磁吸盘。该设计可通过吸盘自重与利用传动机构上连杆、齿轮间的相互关联,改变永磁吸盘二磁系间的相对位置,进而可达到对工件的自动卸载,从而节约能量。该设计在大型工件操控过程中存在安全隐患(自动卸载可能会造成人身安全的威胁),但对于一些非人工操控的工件,如爬壁机器人的永磁吸盘履带的研究有重要的意义。
3 电路优化
3.1 脉冲充、退磁原理
R、L、C串联组成脉冲放电电路(C电容,L电感,R内阻),电容被充电至设定电压时断开充电电源,随即接通LR电路,则电容所储电荷通过L、R迅速地以脉冲形式放电,得到极大的脉冲电流(峰值Im),在励磁线圈(铜线缠绕的线圈)内产生脉冲强磁场,可用来对永磁体充、退磁。图4给出了R与L/C三种脉冲放电波形,图中1、2、3曲线(横轴为时间,纵轴为电流)分别对应R>2 L/C、R=2 L/C和与R<2 L/C。永磁吸盘保持吸力不耗能,充、退磁每次放电前对电容充电所需时间极短(仅数秒钟)能耗很小,电脉冲式起重永磁吸盘比同级电磁铁吸盘可节能95%以上[10-12]。

图4 三种脉冲放电电流波形[9]Fig.4 Three current waveforms of Pulse discharge
3.2 电控优化
对于电控永磁吸盘励磁线圈的供电方式,早期采用桥式全波整流法和储能电容放电法两种方式。但这两种方法都存在缺点:如桥式全波整流法,采用延时控制,励磁电流(有效值)较大,通电时间较长,能耗高、稳定性差[1];而储能电容放电法,通过储能电容一次或多次对励磁线圈放电,此方法可降低从线路上输入的功率,但操作频次不能太高[3]。
张玉维等人[1]在桥式全波整流法的基础上,采用半波的脉动直流电代替全波直流电,不仅可以降低励磁电流的有效值,且时间更短,有利于可逆磁体的逆向极化。半波脉动直流电励磁线圈电路示意图见图5,其中励磁线圈个数设计为偶数。

图5 半波脉动直流电控制励磁线圈电路示意图[1]Fig.5 Schematic diagram of field coil
这种控制方法交流电源的正负半周分别对应一对或数对励磁线圈,无论励磁还是退磁,在线圈里都流着半波直流电,而电源里仍是交流电,使控制线路变得简单、可靠和节能。但依然存在着通电电流较大,通电时间长[3]等缺点。
电流大,通电时间长不仅能耗高,且易导致线路发热、老化,从而影响电控系统的使用寿命。李方园[3]等人提出了采用可控硅(SCR)来控制励磁线圈的方案,可控硅控制励磁线圈原理图见图6。其工作原理为:交流电压经降压电阻降压后输入有源带通滤波器的输入端,通过公式计算选择好各元件参数,就可只允许50 Hz左右的工频信号通过,其他频率的信号则迅速衰减,有效地抑制了电网中各种谐波对控制器的干扰,使输入信号ABC三相电压与输出信号Ua,Ub和Uc同步[3]。此外,可控硅整流电路以其可靠的性能、稳定的电压输出、较宽的电压调节范围等诸多优点,在电力拖动、电机软启动、直流电源等方面得到了广泛应用。
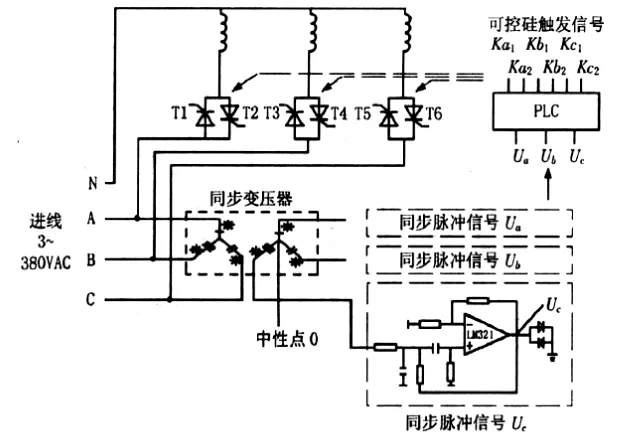
图4 可控硅控制励磁线圈的原理图[3]Fig.4 Schematic of SCR control field coil
可控硅控制避免了强电流,有效保证励磁线圈的安全可靠运行,操作频率亦较高,可有效延长电控系统的使用寿命。但也带来了高次谐波对线路和其它设备的干扰问题[1],仍需进一步改善。
4 电控永磁吸盘的应用
电控永磁吸盘由于安全可靠、实用高效、节能环保等优点使其在以下几个方面得到了广泛的应用:
电控永磁吊具的应用:在欧美及亚洲许多国家的码头、钢铁厂、修造船厂等行业电控永磁吸盘已经得到了广泛的应用。码头前沿的装卸作业特点是风荷载较大、轨上起升高度和轨下起升高度较大、吊具吊运钢板的单个循环作业时间较长,故充分体现了电控永磁吊具的安全性及高效性。安装在岸边桥式起重机上,吊具起吊钢板后,可使钢板回转±110°,将钢板垂直卸载于船舱内或码头面上的平板拖车上,既方便又安全[17]。
电控永磁快速换模和夹模系统的应用:在注塑机上使用电控永磁快速换模和夹模系统,可提高换模效率,3000 t注塑机上的30多吨重的模具最多由两人在30分钟之内完成。该系统安全可靠、实用高效、节能环保、无需维修、无运营费用、柔性极大,在一台注塑机上可对各种不同模具进行快速换模,特别适合于多品种、小批量、准时制混流生产。由于夹紧力均匀分布于模具与磁盘的全部接触表面上,使模具背面无受力“空腔”更好地保证了合模精度,大大提高注塑件的质量[9,13]。快速换模技术,在微型汽车和轿车行业的应用已比较成熟,但是在大型客车行业的应用还处于起步阶段[18]。
此外,还有人将电控永磁吸盘应用于爬壁机器人[19-22],设计了履带吸盘模型吸力方程及其磁路的设计原则,对今后爬壁机器人吸盘的进一步改进具有相当大的理论指导意义。依此设计的爬壁机器人履带吸盘达到很好的实际应用效果。
5 总结
电控永磁吸盘经过多年的发展,由于其磁吸力大、安全系数高、操作方便、移植能力强、节能环保等特点,在各种模具行业、钢材装卸、货物吊运等方面已开展全面应用,取得了丰硕的成果。但是目前仍然有几个关键问题亟待研究解决:(1)电控系统的使用寿命及干扰问题,尽管可控硅可有效减低励磁电流(有效值),减少发热延长了电控系统使用寿命,但也带来了高次谐波对其它电路干扰的问题,且使用寿命远无法与磁控系统相比,如何延长电控系统使用寿命降低干扰仍需进一步探索。(2)电控永磁吸盘小型化问题,由于励磁电流较大,导致励磁线圈尺寸无法做的很小,从而限制了电控永磁吸盘在一些小工件操控方面的应用,目前只能应用于快速换模、装卸吊运等大型工件操作。
[1]张玉维,李立斌.电永磁吸盘吊运钢板的研究[J],机械设计,2002,7:23-25.
[2]泰磁公司.电控永磁夹具系统创新应用[J],模具制造,2007,3:76-77.
[3]李方圆,刘为民.注塑机永磁吸盘的自动控制[J],轻工机械,2008,26(5):53-57.
[4]郎素萍,强冬梅.电永磁吸盘及其应用的研究[J],天津成人高等学校联合学报,2004,6(2):82-85.
[5]院谢祖,荣吴明捷,周晓正,张永丽.永磁起重吸盘的设计思路[J],起重运输机械,2001,7:11-13.
[6]丁立功,张增林.稀土永磁吊车[J],中国稀土学报,1994,12:538-542.
[7]朴明伟,江林威,王纯亚.ZPY 型重力开关式永磁吸盘[J],起重运输机械,1997,1:15-17.
[8]张郁诺.Weiker永磁超强吸盘及永磁起重器[R],上海:上海伟求磁业有限公司,2002.
[9]马景兰,谢祖荣,王伟,张永丽,戴波.磁性材料在起重永磁吸盘中的应用[J],起重运输机械,2008,1:89-91.
[10]谢祖荣,李伟,黄之初.强电流脉冲控制的永磁起重吸盘研究与设计[J],武汉理工大学学报,2002,24:58-61.
[11]谢祖荣,吴明捷,周晓正,张永丽.永磁起重吸盘的设计思路[J],起重运输机械,2001,(7):11-13.
[12]齐凤春.永磁起重技术的发展概况[J],磁性材料及器件,1999,8:56-62.
[13]徐志锋,蔡长春,严青松,万红,余欢.强吸力钕铁硼永磁起重机[J],起重运输机械,2004,3:28-30.
[14]丁宁,王龙山,何平.稀土起重永磁吊的设计原理[J],吉林工业大学自然科学学报,2001,1:86-90.
[15]王文华.关于磁路的几点教学体会[J].职教论坛,2004,(20):29-30.
[16]汪文虎,杨应昌,张军,隽英昌.电控永磁吊具在钢板装卸中的应用[J],制造技术与机床,2007,12:112-115.
[17]沈红宾.电控永磁吊具在钢板装卸领域的应用[J],水运工程,2009年12月第12期总第435期:61-64.
[18]王洪广,张丽丽.快速换模技术在大中型客车行业冲压加工中的应用[J],装备制造技术,2009,4:139?-141.
[19]徐泽亮,马培荪.基于电磁能量理论的爬壁机器人履带永磁吸盘设计研究[J],机械设计,2002,11:23-25.
[20]袁夫彩,孟庆鑫,王义文.水下船体表面清刷机器人吸附及移动性能分析[J].哈尔滨工程大学学报,2006,2:13-14.
[21]王丽慧.水下船体表面清刷机器人及相关技术研究[D].哈尔滨工程大学,2002.
[22]刘春煊,华元涛.一种新型的钕铁硼永磁吸盘及其设计[J],电工电能新技术,1993,3:31-35.
A Review of Research on Electronic Control of Permanent Magnet Chuck
WANG Qing-qing1,LI Yu-di1,FANG Yan-yun1,CHEN Yue1,HU Jin-lian2,LI Zhi-gang*1
(1.School of Physics&Electronics Engineering,Taizhou University,Taizhou 318000,China;2.School of Materials Science and Engineering,Anhui University of Technology,Ma-An-Shan 243002,China)
Because of strong absorption,high safety and convenient operation,electronically controlled permanent magnet chunk has been widely applied to mold processing,mechanical handling,electromagnetic robots and so on.This article summarizes the research on the current design of the electronically control permanent magnetic chuck,its performance improvement and application.It also puts forward two key problems demanding prompt solution.
permanent magnet chunk;magnetizing;demagnetization
周小莉)
TG146.4
A
1672-3708(2010)06-0022-06
2010-01-31;
2010-05-01
浙江省大学生科技创新项目,国家自然基金青年项目(资助号51001078),国家自然基金面上项目(资助号50701002)
李志刚(1978- ),男,博士,副教授,主要从事磁性材料教学及科研工作。
