纳机电矢量水听器二元阵的实验研究
2010-01-09王晓瑶王盼盼张国军
张 丛 ,王晓瑶,王盼盼 ,张国军
(1.中国兵器北方自动控制技术研究所,山西 太原030051;2.中北大学 电子测试技术国家重点实验室,山西 太原030051)
纳机电矢量水听器二元阵的实验研究
张 丛1,王晓瑶2,王盼盼2,张国军2
(1.中国兵器北方自动控制技术研究所,山西 太原030051;2.中北大学 电子测试技术国家重点实验室,山西 太原030051)
纳机电矢量水听器根据鱼类听觉器官侧线设计,是一种新型微纳结合的纤毛式水声矢量探测仿生结构。以往关于纳机电矢量水听器的定向研究都是基于单个水听器的,方位角出现了左右舷模糊,波束图的主瓣宽度较宽。为提高水听器的性能,改进了其敏感单元和封装方式,经国防科技工业一级测量站标定,其频率响应范围为20~2 000 Hz,灵敏度为-165 dB。为解决左右舷模糊,采用二元阵进行定向,水听器的两路输出信号被校准一致后,在某开阔水域进行了纳机电矢量水听器二元阵的实验研究,验证了纳机电矢量水听器二元阵水平沿X轴放置时能够唯一确定目标的方位角,但是俯仰角出现了左右舷模糊;对低频信号的定向能力较强;具有可靠的跟踪水下运动目标能力。
纳机电矢量水听器;二元阵;波达方位估计;方位历程
引言
近几年来 ,随着水下目标隐身技术的发展和对水下运动目标检测距离要求的不断增加,信号工作频率不断降低,这使得声压水听器只能在继续增大阵列孔径的情况下,才能有效地对目标进行估计,而阵列孔径的增加会带来一系列的问题,如实际工程的限制,成本的加大,硬件处理的数据量变大等等,所有的这一切都给其具体的应用带来了困难。因此小尺寸,低频性能好,精度高的矢量水听器成为现在研究的热点[1]。
我们研制的二维纳机电矢量水听器将压阻原理、MEMS技术集于一体,压阻原理的微结构矢量水听器可以使矢量水听器尺寸微型化,探测灵敏度优于压电陶瓷式水听器。该水听器具有尺寸小、灵敏度高、低频性能好,其阵列化不受1/2波长的限制等特性。
本文介绍了改进后的纳机电矢量水听器的频率响应范围和灵敏度。通过在某开阔水域进行二元阵的各种定向测试,对采集到的数据做了详细的分析。感柱体底部质量块与悬臂梁产生相应形变,形变致使梁上的力敏电阻器阻值产生相应变化,从而产生相应的电信号。该矢量水听器能够检测平面内的二维振速分量,从而可以实现目标方位角度估计。其具体的结构及工作原理,张文栋等人在相关文献中已详尽阐述[2-4]。

图1 敏感单元
1 纳机电矢量水听器原理和改进
1.1 纳机电矢量水听器原理
纳机电矢量水听器根据鱼类侧线的听觉仿生学原理设计,其敏感单元由四梁微结构和敏感柱体组成,如图1所示。测量时,敏感柱体与传播到周围的声信号振动谐振,引起敏
1.2 纳机电矢量水听器的改进
纳机电矢量水听器的设计和加工主要包括敏感单元和封装,它们直接影响水听器的性能,主要是针对这两部分进行了改进。
1.2.1 敏感单元的改进
敏感柱体是矢量水听器的核心部分,根据声学原理[5],敏感柱体的密度必须和水的密度相近,而且其尺寸也很关键,因此选择空心的光纤作为敏感柱体,其半径为24 μm,长度为8 000 μm。如果敏感柱体不是垂直地集成在质量块上,水听器的两路信号的灵敏度会有差距,所以敏感柱体必须是垂直地集成到敏感单元上,这是敏感单元的二次集成,为此我们设计了一套装置,主要包括CCD、透镜、监测器和三维平台。
1.2.2 封装的改进
透声帽由聚氨酯材料做成,聚胺酯由聚醚、异氰酸酯、扩链剂三种成份组成,当聚醚与异氰酸酯,扩链剂按体积比1:0.9:0.1 配比时,聚胺酯的特性阻抗为 1.58×106N·s/m3,接近于水,当声波通过这种聚氨酯帽传播时能量损失会最少。
蓖麻油的密度近似于水,因此可以作为传声介质。但是蓖麻油里经常有气泡,气泡对声波有着显著的吸收和散射作用[6],因此蓖麻油须抽真空15 min,然后再慢慢注入聚氨酯帽内。
为防止蓖麻油外流和空气的进入,采用双垫圈密封方式。
改进后的纳机电矢量水听器经国防科技工业一级测量站测试,工作频率从20~2 000 Hz,灵敏度为-165 dB。图2为186 Hz时的指向性图,凹点深度为37.6 dB。
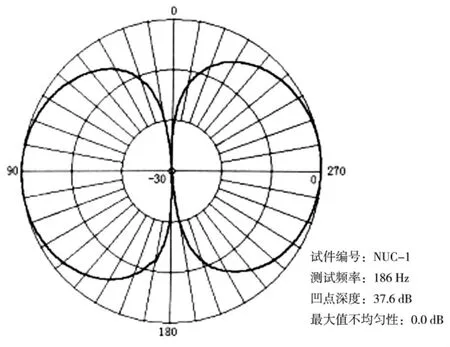
图2 186 Hz时的指向性图
2 纳机电矢量水听器二元阵的波达方位估计实验研究
某开阔水域实验测试系统由声源发射系统、接收系统、采集系统等几部分组成。矢量水听器的二元基阵安装在固定装置上,阵元间距为0.6 m,沿x轴水平放置在水下5 m,每个阵元输出两路振速信号。发射换能器被固定在与测量基阵垂直的方位,吊深为水下2.5 m,距离测量基阵4.5 m左右。采样频率为10 kHz,基阵的数据首先经过前置放大器,电缆传输上岸,再经滤波后送到数据采集卡采集和存储数据。主要进行了如下两种实验:(1)静态测量:声源与水听器基阵的位置相对不变,发射了不同的单频连续信号;(2)动态测量:将声源绕矢量水听器基阵旋转,基阵相对于声源的位置不断改变。
2.1 静态测量分析
声源从正横方向投射到基阵,方位角和俯仰角分别为90°和30°左右,声源为单频连续信号,频率分别是186 Hz和1 522 Hz。利用MUSIC算法[7],对两个单频信号进行二维的波达方位估计,f=186 Hz和f=1 522 Hz时的主瓣宽度分别为7.5°和 19°,波束如图 3 所示。

图3 不同频率时的波束图
实验结果分析:
图3可以看出:(1)该矢量水听器在低频时,波束较窄,基阵抑制噪声干扰的能力较强,对目标方位估计有着较高的精度;频率较高时,波束主瓣变宽,对栅瓣的抑制能力变差,栅瓣和主瓣的高度相差不大,容易造成目标方位的误判;(2)二维矢量传感器线阵布放在x轴时,方位角可以唯一确定,俯仰角出现了左右舷模糊,具体原因已在相关文献中阐述[8]。
2.2 动态测量分析
动态测量时发射的声源是频率为161 Hz的连续信号。
2.1节的研究是基于静止的水听器和声源,而水下的目标都是不断运动的,所以还要研究矢量水听器二元阵是否具有跟踪运动目标的能力,目标声源为161 Hz的连续信号。图4为声源围绕基阵旋转45°的方位历程图。
为了判定方位估计是否准确,采取将声源每隔45°绕基阵旋转一次,稳定后再计算此时的方位角度,总共旋转一周,如图5所示。由于实验条件有限,本文只验证了低频时水平方位估计的性能。

图4 时间方位历程图
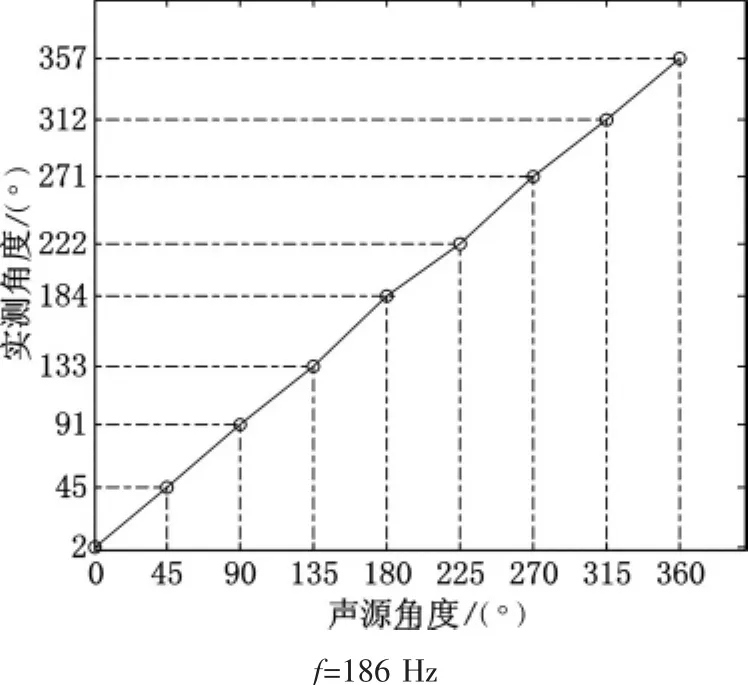
图5 方位角在不同角度的侧向
实验结果分析:
由图4可以看出,测量方位角随声源角度的改变而改变,说明系统工作正常,历程图基本符合声源实时相对于基阵的方位,验证了该矢量水听器具有跟踪运动目标的能力。
由图5可知,在频率为161Hz时出现的最大定向误差为3°,测量结果的均方误差为2.31。可知该水听器对目标的方位估计基本正确,且具有较高的定向精度和可靠的稳定性。
3 结论
经改进后的纳机电矢量水听器,从20~2 000 Hz有着平滑的频响曲线,灵敏度达到了-165 dB。本文首次研究了改进后的纳机电矢量水听器二元阵的定向性能,分别进行了静态测量和动态测量分析。研究结果表明:二元的纳机电矢量水听器小尺寸阵沿x轴水平放置时,方位角可以唯一确定,俯仰角出现了左右舷模糊;低频时,波束较窄,基阵指向性较好,抑制噪声干扰的能力较强;跟踪运动目标时具有较高的定向精度和可靠的稳定性。
由于实验条件有限,本文对俯仰角的定向精度和稳定性没有做出具体分析。下一步应该针对纳机电矢量水听器垂直放置沿z轴方向时,能否实现二维波达方位无模糊定向进行研究。
[1] 陈丽洁,张鹏,徐兴烨,等.矢量水听器综述[J].传感器与微系统,2006,25(6):5-8.
[2]ZHANG W D,XUE CH Y,XIONG J J,et al.Piezoresistive effects of resonant tunneling structure for application in micro-sensors[J].Indian Journal of Pure&Applied Physics,2007,45:294-298.
[3]XUE CH Y,TONG ZH M,ZHANG B Z,et al.A Novel Vector Hydrophone Based on the Piezoresistive Effects of Resonant Tunneling Diode[J].IEEE SENSORS JOURNAL,2008,8(4):401-402.
[4]谢斌,薛晨阳,张文栋,等.硅微仿生矢量水声传感器研制[J].传感技术学报,2006,19(5):2300-2303.
[5]杨德森,洪连进.矢量水听器原理及应用引论[M].北京:科学出版社,2009:41-45.
[6]何祚镛,赵玉芳.声学理论基础[M].北京:国防工业出版社,1981:397.
[7]王永良,陈辉,彭应宁,等.空间谱估计理论与算法[M].北京:清华大学出版社,2004:83-85.
[8]赵微,李秀坤.矢量线阵二维波达方位估计的方[J].应用声学,2008,27(5):659-661.
[9]张开锐,薛晨阳,张国军,等.MEMS矢量水听器及其方位估计研究[J].传感器与微系统,2009,28(6):13-15.
Experimental Study Based on Binary Array of NEMS Vector Hydrophone
ZHANG Cong1,WANG Xiao-yao2,WANG Pan-pan2,ZHANG Guo-jun2
(1.North Automatic Control Technology Institute,Taiyan Shangxi,030051,China;2.National Key Laboratory For Electronic Measurement Technology,North University of China,Taiyuan Shanxi 030051,China)
NEMS vector hydrophone was designed by the auditory principle of fish's stereo cilium.It is a novel cilia-type structure which could detect the two-dimensional underwater acoustic signal.But previous direction estimation was based on a single NEMS vector hydrophone,so the azimuth had the problem of port and starboard ambiguity,the main lobe width of beam pattern formed by single vector hydrophone was wider.In order to obtain better performance,the sensitive cell and package of the hydrophone had been improved.The improved hydrophone calibration is finished in National Defense Underwater Acoustics Calibration Laboratory of China.The results shows that the working frequency ranges from 20 Hz to 2 kHz and the sensitivity of the hydrophone is about-165 dB.In order to resolve the problem of port and starboard ambiguity,the binary array is adopted to direction.After the two output signals of the hydrophone were calibrated uniformly,the experiment using binary array by the NEMS vector hydrophone was done in anechoic tank.The results were described as following.Firstly,the binary array could decide the azimuth uniquely,but the pitch had the problem of port and starboard ambiguity.Secondly,the NEMS vector hydrophone can determine the angles of the low-frequency signal accurately and tracked underwater targets reliably.
NEMS vector hydrophone;binary array;direction of arrival estimation;bearing time
TB565
A
1003-2029(2010)04-0062-04
2010-03-09
国家自然科学基金资助项目(50775209)
