任务分析在中小学机器人教学中的应用
2009-12-17马云王荣良
马 云 王荣良
摘 要:本文试图把任务分析的理论和技术引入到我国的中小学机器人教学中,使我国的中小学机器人教学更加符合教与学的规律。为此,本文先介绍了任务分析的含义与基本步骤,然后就任务分析的教学理论和技术分析了教学目标中的学习结果类型、分析学习的支持性条件、确定学生的起点能力和将学习任务进行排序,并就如何应用于中小学机器人教学设计的实践作初步的尝试和探讨。
关键词:中小学机器人教学;任务分析;起点能力;使能目标;学习类型
中图分类号:G434 文献标识码:A 文章编号:1673-8454(2009)20-0048-02
一、任务分析的含义与基本步骤
任务分析作为一门复杂的教学设计技术,直到现在,教学专家尚难形成一致的任务分析定义。广义教学设计中的任务分析包括教学目标分析、编写教材、编制形成性或终结性测试题和选择教学的策略等。其中任务分析应从目标设置与陈述开始,当然所有的教学步骤的设计也离不开任务分析。本文主张的任务分析指的是课堂教学设计中的任务分析,它是为教师选择教学策略服务的,教师的任务就是把本课程的教学目标落实到每个教学单元或每一节课中,教师在安排课时计划时首先需要设置和陈述清晰的教学目标。在陈述了具体的教学目标后,在进行任务分析时应有以下三个基本步骤:(1)将陈述的教学目标纳入学习结果的相应类型中,也就是运用目标分类理论对教学目标进行分类;(2)分析每一个学习结果需要的条件,分析要教的任务得以实现的内部和外部学习条件,并排列出它们的先后顺序;(3)确定与教学目标有关的起点能力,包括基础知识、智慧技能和认知策略等。
二、分析教学目标中的学习结果类型
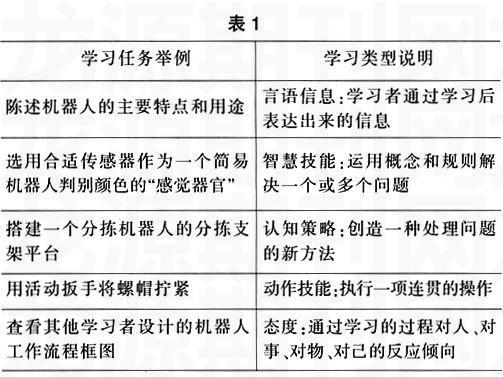
教学目标是预期的学生学习结果,它将所学课程提出的理念和目标具体化,并为学习结果的测量与评价提供了依据,而任务分析这一技术的核心思想就是分析教学目标,揭示教学目标所属学习结果的类型,是确定学习条件及其学习任务顺序关系的基础。目前指导任务分析理论比较常用的有加涅的学习结果分类理论和奥苏贝尔“同化”理论等,加涅将人类学习分成五类,分别是言语信息、智慧技能、认知策略、动作技能和态度,其中前三类学习结果属于认知领域,第四类属于动作领域,第五类属于情感领域。[2]
根据中小学机器人学科的特点,并结合加涅的学习结果分类,我们试图将中小学机器人课程的教学目标进行分类,表1列出了本课程教学目标中学习任务举例及其所代表的学习结果类型,其中左边一栏是用行为动词陈述的目标,行为动词“陈述”、“选用”、“搭建”、“用……”和“察看”分别暗含的学习结果类型是言语信息、智慧技能中运用规则、认知策略、执行动作技能和态度。
三、分析每一个学习结果需要的条件
不同类型的学习,要求有不同的学习条件。我们往往把影响学习中小学机器人学科的条件分为学生自身的内部条件和外部条件。内部条件又分为必要条件和支持性条件。必要条件是不可缺少的学习条件,支持性条件是一般有助于学习的条件。
在中小学机器人教学中,学生要掌握“制作分拣机器人”一课内容时,[1]如“传感器概念及其功能、分拣机器人模型设计及搭建、分拣机器人控制电路设计与连接和相应程序的设计与调试”等知识技能是学习制作分拣机器人的必要条件,缺少其中一个,学习就不能发生。而“用调试程序测试各类传感器”是一种认知策略,它有助于制作分拣机器人的学习,所以被称为支持性条件。此外学生的注意力、学习动机等也是支持性条件。由于这些情感领域的条件是对如何学习都起支持作用的,这种一般性条件就不必具体分析。没有支持性条件,其学习不一定能发生,但会影响学习的效率。
我国的现行教学理论及最新课改目标的描述中只有含糊的“知识与技能”概念,没有智慧技能概念,更谈不上学习的必要条件和支持性条件。这样就导致教师的教学设计跟着感觉走,这种现象应通过现代教学设计原理的学习予以避免。
机器人学科教师应掌握智慧技能的必要条件和支持性条件,一般我们要求强调学生的动手能力,并不是说学生手的肌肉不会动,而是指他们可能缺乏智慧技能,不知道如何借“手”来完成一定的智力任务。在机器人教学中,认知策略很重要,但不能单独学和单独教,必须渗透在智慧技能和言语信息中学和教,态度和认知策略一样,也没有必要单独教,也应渗透在学科知识和技能中学和教。
四、根据内部条件分析,将学习任务排序
任务分析一般是从终点目标开始。在确定学习结果类型之后,从终点目标逆向反复提问:“学生要完成这一目标,他必须先具备哪些能力?”一直追问到学生的起点能力为止,然后把学生需要掌握的学习目标分层次一一排列出来。教师在进行上述任务分析时,可依据已有的机器人教材,将要上的某个教学单元或某一节课所需完成的学习任务按序列分成若干步骤即可。
例如,在“制作分拣机器人”中,[1] 其中有一个“认识和实现光反射传感器(简称光感)对环境(颜色)的识别”的学习任务,对此进行了任务分析,从起点目标开始,依次实现子目标(任务)……直到终点目标。子目标又称为使能目标,它是使终点目标得以实现的次级目标,一旦任务分析完成后,教学的顺序也就确定了。
五、分析学生的起点能力
学生的起点能力是指学生在学习新的知识技能之前学生原有的学习习惯、学习方法,具备的相关知识和技能水平等。通过任务分析方法,我们就可以清楚地知道学生要达到“认识和实现光感对环境(颜色)的识别”这一学习目标所需要的起点能力是什么,其中“会选择合适的光感,能确定主控板上光感接口,知道驱动光感的接口函数”,同时也是本教学单元所要的学习目标,因此,教师在教学中就应该十分重视上述内容的教学,才能达到总的教学目标。倘若学生不具备起点能力,教师要及时补救;否则,就不能进行新知识技能的教学。即使强行进行知识技能的教学,也势必导致机械学习的发生。
由于学习者的起点状态水平对新的学习成败起着决定性作用,所以一般有经验的优秀教师在讲新课前或者是在新课的教学过程中通常采用课堂提问、课前小测验或观察学生的操作等方法,对学生的起点能力进行分析与诊断,在确保达成规定教学目标的85%后,才能进行下一步的学习。其目的是确保学生在接受新知识前,必须具备适当的起点能力。此外,机器人学习往往离不开其他学科的知识学习,所以例如数学、物理等技能学习也是决定机器人知识学习的重要起点能力。
任务分析需要有坚实的学习理论基础,它是一门比较复杂的教学设计技术。目前我国中小学机器人教学设计主要还是依据个人的经验,缺少科学的理论分析。如果在中小学机器人教学设计中引进了任务分析思想,而且能用任务分析的思想指导教学过程的设计,那么不论教学目标是否列出过程目标,教师都会根据学习的规律进行创造性的教学。
参考文献:
[1]王荣良.小学智能机器人[M].上海:上海教育出版社,2007.
[2][美]加涅,皮连生译.教学设计原理[M].上海:华东师范大学出版社,1999.
(编辑:刘轩)
