VirtuoZoAAT在制作焦作地区正射影像中的应用
2009-10-26邓安健余敦棠
邓安健 余敦棠
摘要:叙述了VirtuoZoAAT进行空中三角测量的工作流程和主要的步骤,并通过VirtuoZoAAT进行空三处理后,导入到VirtuoZo进行了焦作地区DOM的制作。
关键词:VirtuoZoAAT;自动空三;正射影像
中图分类号:TP317文献标识码:A文章编号:1009-3044(2009)22-0000-00
VirtuoZoAAT是国际上著名的空三加密软件,它具有半自动量测控制点,全自动完成包括内定向、选取加密点、转刺加密点、相对定向、模型连接和生成整个测区像点网的功能,在实际作业中被广泛使用。本文将VirtuoZoAAT应用于焦作地区正射影像的制作中,能可靠、高效、快速地进行作业,体现了VirtuoZoAAT在实际应用中的优越性。
1 自动空三的相关理论
1.1 自动空三的作业流程
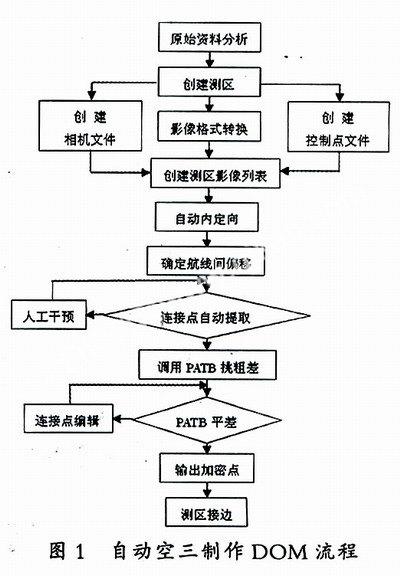
自动空三就是利用数字影像,根据事先在影像上设定的范围上搜索加密点,然后利用数字影像匹配技术,在相邻影像上搜索同名点,并自动记录其像点坐标,半自动量测少量地面控制点的像点坐标,最后利用这些少量的地面控制点及其像点坐标进行解析计算,求解加密点的地面三维坐标及所有影像的外方位元素。VirtuoZoAAT自动空三实现了选点、转点、挑点和量测像点坐标的全自动化。自动空三作业的基本流程图如图1所示。
1.2 自动空三的主要制作方法
1) 数据准备。自动空三所涉及的资料和参数很多,一般所需要的资料数据有扫描(数字)航片、外业控制点数据、数字刺点、点位照片、测区布点略图、相机参数文件等。在准备阶段不仅要仔细核对各参数和数据的准确性,还要在时间上对整体工作有统筹的安排。
2) 自动内定向。内定向的目的是确定数字影像的扫描坐标系和像片坐标系之间的关系及数字影像可能存在的变形。VirtuoZoAAT提供自动和手动两种搜索框标中心模式,它采用模版匹配技术,自动识别影像框标点和计算内定向参数,实时显示定向误差和定向参数,能实现测区影像的全自动内定向,可对整个测区进行批处理,能方便作业,节省处理时间。
3) 自动选点和转点。在空三过程中,为了保证定向精度和便于后续易于探测粗差点,需要提取大量的连接点。VirtuoZoAAT采用基于高度自适应性的影像特征提取算法提取地物特征点,并采用基于高精度、高可靠性的影像匹配技术,将特征点自动转刺到相邻航片上。加密过程中,VirtuoZoAAT记录了详细的转点信息,用户很容易发现如定向失败、模型连接失败等异常情况,能及时准确作出相应的处理。
4) 自动挑点。完成自动转点后,就可以进行挑点了。VirtuoZoAAT调用著名的光束法区域网平差程序PATB,能高效、可靠和自动地剔除像点网中的粗差点。系统根据用户选定的连接点分布方式挑选出精度最高的点保留下来作为加密点。挑点模式一般推荐为“5×3”,这种分布对于旁向重叠大于30%的情况非常有利。
5) 连接点编辑。VirtuoZoAAT可以自动显示粗差点,方便用户进行调整。在连接点编辑界面中用户还可以在缺点位置增加连接点。VirtuoZoAAT具有自动匹配同名点功能,用户也可在立体观测下进行连接点的编辑。编辑完所有的粗差点后,再调用PATB解算,直至没有粗差点,最后就可以自动创建加密点文件了。
VirtuoZoAAT除具有以上功能外,还可半自动量测和预测控制点,支持相机自检校补偿系统误差和GPS参数联合平差,支持测区之间自动接边等功能。
1.3 影响自动空三精度的因素
1) 影响原始观测数据精度的因素。地面控制点坐标,像片的重叠度、连接点和控制点的数量及其分布等几何结构因素共同决定了平差区域的最终精度。其次在自动空三中,原始数字影像的精度,影像的量测精度和平差计算精度也对最后成果产生一定的影响。
2) 影响区域网几何强度的因素。航向和旁向的重叠,保证像片连接点不仅要处于航向的三度重叠范围内,还要处在旁向重叠范围内。还可以把辅助数据、地面量测数据和摄影测量观测值一起纳入联合的区域网平差中,以改善区域网的几何质量,提高平差精度。
2 作业过程中的几个特殊情况及处理方法
2.1 自动相对定向失败
在自动转点过程中,相对定向中误差要小于四分之一像素大小,如果相对定向中误差超限,或定向点非常少,相对定向都视为失败,需要人工相对定向。当中误差超限时,可手动删除残差较大的点;如果系统匹配的同名点非常少,则需要手工增加一对同名点作为匹配种子,然后执行自动匹配和相对定向,并检查删除残差较大的点,继续执行相对定向,直到满足精度要求为止。当模型出现大面积落水或森林覆盖时,无法自动匹配,这时可人工在六个标准点位附近量测至少6个点,然后执行相对定向并调节每个点到满足要求为止。
2.2 模型连接失败
如果模型连接的中误差过大,则模型连接失败。这时可在交互式编辑界面检查连接点,如果连接点不正确,可删除或调整该连接点;如果标准点位缺点,则至少在两个标准点位增加若干连接点。有时为了能继续转点,可适当放宽连接点中误差,在随后的自动挑点过程中,系统会把此类粗差点删除,不会影响成果精度。
2.3 自动挑点不能进行或不完整
通常航线间的偏移点至少需要在航线的首尾各加一个点,当航线较长或地形复杂时,可在航线中间均匀量测若干点。当航线间连接强度不够时,航线间的转点会非常少,从而造成自动转点不能进行。这时可将航线间的连接点自动增加位偏移点,来增强航线间的连接强度。有时会遇到只调用了一两次PATB程序便无法进行的情况,此时系统已删除了大多数粗差点,但是很多连接点也被删除了,造成航线间的连接强度不够无法继续进行挑点,这时可手工增加连接点,进行空三加密。随着控制点和连接点的增加,精度要求的逐步提高,在自动挑点过程中没有挑出的粗差点也被筛选出来,从而可以对这些点进行人工干预,减少这些点对成果精度的影响。
2.4 像点网的编辑原则
区域网的内部连接性是由测区像点构网强度决定的,而且对最后的加密精度有重要的影响。像点的构网强度应保证测区中每一张影像三度重叠区的上、中、下三个标准点位上必须有连接点,且航线间的重叠区域里的像点必须向相邻的航线转测。当执行过PATB平差后,在PATB报告中,精度不好的点会作为粗差点不参与最后的平差,并且显示在编辑主界面左下角的“Critical Point”选项卡中。调点时需要参照具体影像或立体观察结果进行调节,而不是只根据残差结果进行调点。在大比例尺航摄中,经常会遇到大面积落水区域。在落水区域中量测连接点会导致落水区域附件的像点网破碎,使得像点网在这部分区域发生扭曲,影响加密的精度。为了减少落水区域对像点网的影响,可在影像落水区域边上按间隔1~1.5厘米量测连接点,使落水区域附件的像点网有一个稳固的边界,从而减少落水区域的影响。
3 应用与结论
本文采用适普软件公司开发的VirtuoZoAAT3.3对焦作地区SWDC数码航摄仪获的真彩色数字影像进行处理,进行该地区某区域的DOM的制作。此次航摄高度为480米,焦距为35.7毫米,地面分辨率为13-16厘米,成图比例尺为1:1000,航飞的总航片数为4567,覆盖面积达530平方公里。空三加密后,将成果导入VirtuoZo进行批处理,生成DOM,生成的DOM满足精度要求,图2是正射影像图的一部分。
作业过程中可以发现,VirtuoZoAAT具有自动化程度高、作业速度快、作业效率高等优点,可高效、可靠检测粗差和自动剔除粗差功能,加密精度高,可对复杂地形诸如大面积落水和大面积森林覆盖等具有高度自适应性,可自动处理包含交叉航线和分段航线的复杂测区,可直接处理数字航片,能满足各种比例尺测图要求,已被广泛应用于测绘、地质、水文等行业。
参考文献
[1] 张祖勋,张剑清.数字摄影测量[M].武汉:武汉大学出版社,2002.
[2] 张剑清,潘励,王树根.摄影测量学[M].武汉:武汉大学出版社,2003.
[3] 赵明,郭卉,王欣滔.VirtuoZoAAT在高山地地形中的应用[J].测绘与空间地理信息,2008,30(5):181-182.
[4] 肖高铭,詹卫华,张艳红.浅谈空中三角测量在实际工作中的应用[J].测绘与空间地理信息,2007,30(6):161-165.
[5] 张国宁,余洁,刘继琳.浅滩自动空三在上荆江河道项目中的应用[J].地理空间信息,2006,4(5),47-49.
