无接触供电技术在AGV中的应用
2009-02-16杨文华苏运春喻锐王志德向晓知韩圆圆
杨文华 苏运春 喻 锐 王志德 向晓知 韩圆圆
摘要:将无接触供电技术应用于AGV使AGV更加环保、高效,这一优势在当前能源紧缺、对环境要求越來越高的大背景中显得更加突出。
关键词:无接触供电、ACV、电磁导引
无接触供电技术又称为无接触功率传输技术(ContactoessPowerTransfer,简称CPT)或感应电能传输技术(Inductive CoupledPower Transfer,简称ICPT),它是利用现代电力电子能量变换技术和磁场耦合技术,并借助于现代控制理论和微电子控制技术,实现能量从静止设备向静止或移动设备传输的一种有效方法。
近年来,在一些欧美国家的多个行业中都有无接触供电技术的商业产品问世,其中对移动设备的无接触供电技术研究开发已经比较成熟。在国内,比较典型的应用案例有昆船研发的用于机场行李运输的DCV系统、用于北京物资学院和天津SEW的昆船直行穿梭车等项目。但总体来说,无接触供电技术用于AGV的案例还比较少见,在国内尚属于研究阶段。本文就无接触供电技术在AGV领域的应用进行探讨。
无接触供电技术原理
无接触供电是指输电线路和负载方在没有电气连接和物理接触,甚至他们之间还有相对运动的情况下,实现电能的传输。无接触供电系统的理论依据是电磁感应原理。
目前国际上普遍采用的方案是利用气隙变压器来实现电能的无接触传輸。常规变压器的一次、二次线圈绕在共同的闭合铁心上,虽然磁路耦合系数很高,但一次、二次线圈不能相对运动。而无接触供电技术就是将这种变压器模型的一次线圈和二次线圈分开,一次绕组可安装在输电轨道或埋设于地面以下,延伸为很长的环路;二次线圈绕在围着一次绕组可以移动的开口铁心上。原理如图1所不。
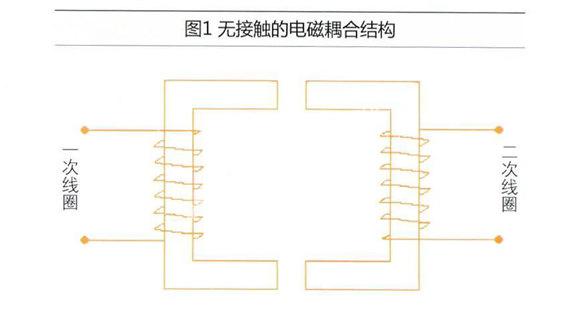
因磁路经气隙而闭合,故可称之为气隙变压器。其一次侧、二次侧之间通过电磁感应实现电能传输。在外加电压作用下,变压器一次侧的交流电在铁心中产生交流磁通,磁势主要降落在变压器的气隙两端。
与常规变压器不同,无接触供电系统中的变压器由于气隙的存在,其铁心中的磁通密度很小。这样,为了产生足够的电势、增加传输功率以满足负载的需要,目前普遍采用的方法是提高一次侧交流电的频率,以增大变压器铁芯内交变磁场的频率,并对一次线圈和二次线圈的漏感进行补偿,从而得到较大的二次侧感应电势。
一般的无接触供电系统中除变压器以外,静止和移动部分都有变换器。先将普通50Hz交流电整流成直流,再经DC-AC转变成25kHz高频交流电,作为静止变电部分输入,经磁路耦合,在移动取电部分感应出高频交流电,然后根据负载的需要,再将该交流电进行各种处理,也可以有多
个电压等级输出。
无接触供电技术在AGV中的应用
长期以来,AGV供电技术受制于电池,AGV驮着电池运行,不仅增加了自重,也降低了AGV系统的运行效率,造成了AGV使用寿命短、维护成本高、污染环境、应用领域受限等问题,限制了AGV在一些有很好市场前景的特殊行业的应用。
无接触供电技术发展到今天,让AGV甩掉电池这个包袱已经成为可能。同时,还可以利用无接触供电中的供电环路来进行AGV导引和通讯,实现系统资源的综合利用。
1无接触供电技术在AGV中的应用方案
①AGV的供电
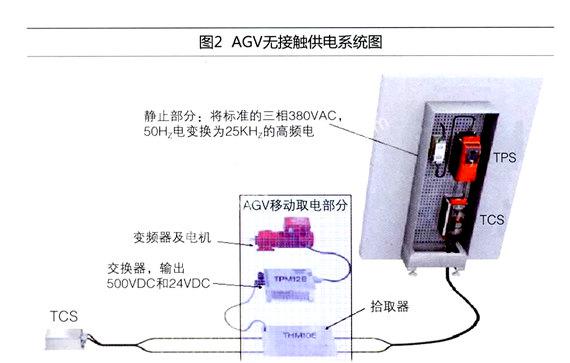
如图2所示,AGV端取电部分有拾取器和变换器,放置于AGV上,随车体移动;静止电路部分则由滤波器、整流器、逆变器、变压器、补偿装置和埋于AGV行使路径地面下的电缆等部分组成。AGV上的能量拾取器始终置于地面电缆的正上方,两者之间留有一定间隙。当静止电路部分输入标准的三相380V交流电时,通过滤波、整流、逆变等一系列过程后,以高频大电流注入输出环路转换为磁场能发射,AGV通过能量拾取器接受磁场能量,并通过逆变等相应的能量调节装置,变换为AGV可以直接使用的动力电源和控制电源,从而实现了AGV的无接触供电。
由于进行感应耦合的静止和移动部分之间有很大的漏感存在,耦合系数非常低,要保证有效的功率传输,通常在将高频大电流注入输出环路后,对电路的漏感进行补偿。
②功率选择与计算
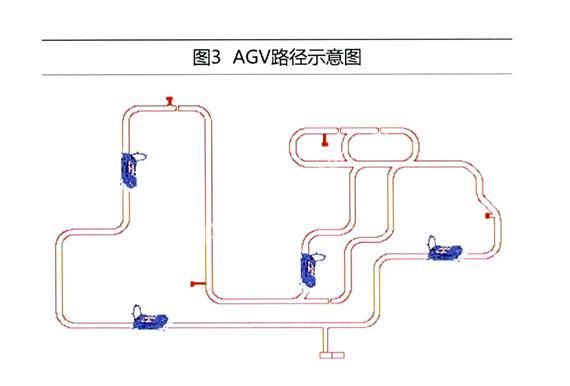
在使用无接触供电时,只要有AGV运行的地方,都需要铺设供电环路。因此,AGV路径的复杂程度也决定着供电环路的复杂程度。
在一个AGV系统中,根据实际情况,把路径按取电需要分成多个供电环路,如图3所示。一般来说,在每个环路上可能有多台AGV在上面取电运行。由于每个供电环路的最大输出功率是有限的,并且功率越大,相应的器件成本会越高,因此,如何选择供电环路的功率对提高系统的运行效率和节约成本尤为重要。
同一个AGV系统中,不同供电环路上出现AGV数量的几率是不同的。可以通过模拟仿真,对不同环路出现AGV数量的几率进行统计计算,进而估算出每个环路所需的功率,最终选择无接触供电系统的不同功率的器件。
在运行中,如果一个环路上的AGV已经达到最大数量,还有AGV要求进入该环路运行,应如何进行处理?实际上,AGV上位控制系统(AGVS)知道系统中所有AGV的运行状态:加速前行、匀速前行、减速行驶以及停车,通过了解各环路上AGV的运行状态,就能够计算出各个环路当前的功率消耗。如果功率允许,其他AGV还能驶入,否则,该台AGV只能停在前一环路等待,或者选择其他路径运行。
③AGV利用供电环路进行导引
现有的AGV导引方式有很多类型,如电磁导引、激光导引等。其中,电磁导引的原理是在AGV行使的路径下铺设电磁导引线,通过在导引线上加载不同频率的电磁信号来实现AGV的导引。在无接触供电系统中,可以利用供电环路替代电磁导引线,在上面加载经过调制的电磁信号,AGV上装备特制的传感器件,这样AGV就可利用无接触供电环路实现导引,如图4所示。
2AGV应用无接触供电技术的优势
与传统供电方式相比,AGV使用无接触供电技术具有很多优势,包括:
①排除了因电池问题而造成的环境影响,更加环保、安全;
②供电系统与AGV无直接接触,无摩擦,易维护;
③降低了AGV的自重,提高了AGV的负载能力,单位能量的利用率更高;
④AGV可以不间断工作,提高了AGV系统的整体效率;
⑤AGV控制系统更加简化,不需要对电池能量部分进行检测;
⑥一次成本投,后期免维护。
3技术难点
目前,AGV使用无接触供电技术还存在一些难点,例如:在同一路径环路上的允许AGV数量模拟计算比较复杂;AGV上位控制系统不仅要具备普通AGV系统的交通管理功能,还需增加环路功率计算模块,以确保AGV的稳定高效运行;AGV离开导引路径后无法运行,需提供另外的电源或人工移动。
尽管如此,无接触供电技术在AGV上的应用将使AGV更加环保、高效,这一优势在当前能源紧缺、对环境要求越来越高的背景中也显得更加突出。因此,无接触供电技术的应用必将使AGV受到更多企业的青睐。
