浅谈使用UGNX对机械结构进行运动分析
2009-01-06张向明
张向明


[摘 要]随着三维造型软件的逐渐普及,越来越多的复杂计算在三维造型软件中变得非常简化和直观,本文研究了利用美国EDS公司出品的UGNX系列软件对常见机械结构进行运动分析的方法和实际意义,同时证实了UGNX是可以准确有效地分析机械运动结构的。
[关键词]CAD UGNX 运动分析 机械
[中图分类号]TP391.72[文献标识码]A[文章编号]1007-9416(2009)11-0112-04
Motion Analysis of Mechanism Structure by UGNX
Zhang Xiangming
(LG(Tianjin) Electronics CO., LTD.)
[Abstract]More and more complicated calculations and analysis are getting easier and obviously by advanced 3D modeling software fast spreading. This document will show the method and meaning of motion analysis by the US.EDS Crop UGNX software, and also we can make a conclusion that UGNX software could analyze the motion of mechanism effectively and accurately.
[Key Words]CAD UGNX Motion Analysis Mechanism
引言
本世纪90年代开始,AutoCad软件在我国国内的应用已经非常的普遍,但是随着现代化产品日益变得复杂、精密,原有的二维造型软件已经不能再清晰、完整的表达出产品设计人员的设计意图与理念,并且对于产品的一些动态分析无法实现,致使产品只能在制作出实物之后才能够进行验证,既浪费人力、财力又浪费时间,而先进的三维造型软件在这些方面都拥有着传统二维造型软件无法比拟的优势。本文仅以美国EDS公司出品的UG NX5.0版为例对常见机构的运动分析进行研究,并期望本文能够对类似产品的结构分析起到抛砖引玉的作用。
1 使用UGNX5.0对机构进行运动分析
1.1 UGNX软件综述
UGNX5.0除了拥有强大的三维建模功能之外,还拥有强度分析,运动分析,机械加工,模具制作,流体分析,汽车设计/模拟等等多种强大的模块,这里仅针对运动分析(motion simulation)部分进行分析说明。
1.2 UG NX5.0运动分析的详细说明
使用UGNX5.0的建模模块(modeling)创建结构各个部件的实体模型,具体方法请参照UGNX建模相关教程,这里不再进行赘述。
将保存好的机构三维造型(组件状态)打开并选择开始(Start)下拉菜单的运动分析(motion simulation),此时就进入了UGNX 5.0的运动分析界面。
选择新建机件(Link),对所需要进行运动分析的各个机件全部进行定义,包括运动中心(如转动部件的旋转中心),运动方向等等,同时还可以根据需要对每一个机件的材料、重量等等特有属性进行定义。
选择新建运动副(Joint),对所有形成的运动副(包括移动副,转动副,螺旋副等等)进行定义,对没有相对运动的机件设定为固定副,当然也可以在定义机件时选择将其定义为固定位置(Fixed),效果和这里定义固定副是一样的。
(1)施加驱动力:根据实际的需要对机构的主动件施加相应的驱动力,一种是直接给定运动部件一个运动,比如一个滑块以50mm/秒的速度匀速进行运动,则可以在定义驱动力的界面直接定义为匀速(constant)50,UGNX默认的单位是mm/秒。同时还可以给定主动件多种形式的运动,比如简谐振动(需要定义振幅、频率,初始位移、相位角等),还有其他可以用户自己定义的多种运动方程式来给定驱动等等。另外一种则是通过给定作用力、扭矩等等来实现机构的运动,包括标量力(scalar)、矢量力(vector)等等。如果滑动副、转动副或者其他的运动副的运动方式为非理想表面接触(有摩擦),则同样可以在该界面来定义由两种相互接触的材料特性决定的动、静摩擦系数等参数来模拟实际的运动情况。
(2)定义解算:此时选择solve,对以上已经定义了运动参数的机构进行自动解算,这里会让用户定义时间(Time)和步数(Step),注意这里的时间单位为秒,即主运动件运动的时间,如果在Time选项栏里面输入10,Step里面也输入10的话,就表示分析该运动机构运行10秒的整个过程,而整个过程分解为10个步骤,即每10/10=1秒进行一次数值分析计算,以此类推,当然运动的动画过程是完全平滑而不是分步显示,分步计算的是中间的各个点的特性数值。其他的一些选项则是关于重力加速度等等设置,一般选择默认即可,然后再点击solve进行解算,软件运行分析。
(3)显示、输出运动分析结果:在界面左侧模型树的motion simulation上面选择鼠标右键选择运动分析(motion analysis),可以看到多个选项,包括动画模拟,图形分析,数据分析等等,可以通过直观的动画效果来观察整个机构在规定的范围之内运动的轨迹,图形分析可以看到运动曲线,数据分析则是通过生成Excel表格形式列出所需要的不同构件关键点每一步(Step)的位移、速度,加速度等等精确的数值,非常直观,一目了然。
举例说明:这里以最典型的一个曲柄滑块机构为例进行详细的说明。
2 模型建立与参数定义
曲柄滑块的各种参数定义参照本文2.1的内容进行设定,这里不再进行赘述,但是这里有几个说明的地方:定义机件2的旋转中心为A点(参照图1)。
而机件4、5之间的运动副方向为水平方向,这里暂时给定曲柄2也就是由机件1和2组成的旋转副定义驱动,这里输入数值1,选择匀速,意义为给定杆件2一个1度/秒的匀角速度圆周运动。
2.1 自由度验证
根据机械原理的公式进行自由度的计算
F=3n-2PL-PH[1],
N:活动机件数;
PL:低副数量;
PH:高副数量;
在这里活动件有三个,即2、3、4号部件,低副PL=2,高副PH=0,所以F=3x3-2x4-0=1,也就是说给定一个驱动,该机构就可以有稳定的运动,由于之前我们已经对曲柄2进行了定义,所以直接运行解算(具体步骤参照2.1),就可以看到该曲柄滑块机构以匀角速度(曲柄)平稳的运行(参照UG输出的运动动画)。机构运行的行程则由设定的时间来决定,如在Time选项里面输入360(秒),而之前设定的曲柄运行速度为1度/秒,则曲柄正好运行一周,如果此时再给滑块一个D向的匀速运动(这里也输入1,表示意义为1mm/秒,这里要注意UGNX运动分析里面默认的单位是mm/秒),然后再执行运动分析解算,就会发现滑块4与连杆3分离了,而实际中由于滑块和连杆属于刚性联接,在这种情况下就会造成机构的破坏,所以给出的驱动数量不能多于机构本身要求的自由度,否则会对机构进行破坏。同样的,如果驱动数少于机构自由度,会造成机构运动的不确定性或者不运动。在此例中显然如果一个驱动力都没有,该机构是不会运动的。
2.2 锁死点验证
此例中曲柄2的长度(两圆心之间的距离)L2=50mm,连杆3的长度L3=65mm,滑块与曲柄旋转中心的Y向距离L4=9mm,(参照图2、图3)。
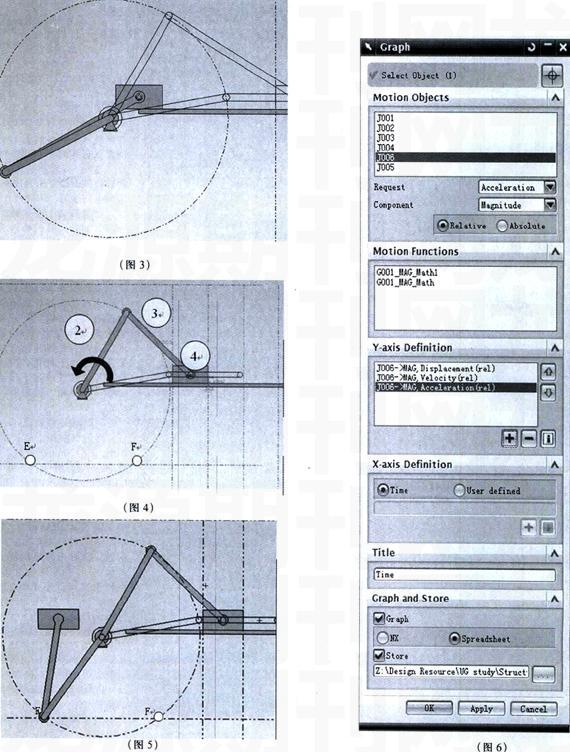
首先我们给定曲柄2一个匀角速度圆周运动,速度为1度/秒,运行解算后发现无异常,曲柄可以完成完整的圆周运动,表明当曲柄2为主动件,且杆长为之前设定值时无锁死现象。如果此时我们给滑块4一个向左的匀速运动,1mm/秒,则会发现机构会停在图3所示位置上,
而且解算时也会出现锁死提示(RecurDyn solver lockup),这样机构就会在运行到锁死点的时候停止运动,可以很直观的观察到,并且可以准确的记录下来此时曲柄滑块机构各个部件目前所在的位置,通过使用全程跟踪(Trace Entire Mechanism)命令可以完全再现出锁死点的准确位置(生成出现锁死位置时各个部件的三维模型,便于和初始位置进行直观的对比)。
2.3 极限位置的验证
当以L2=50mm,L3=65mm,2号曲柄为主动件时,该机构的运动极限位置可以很直观的看出,滑块在两个极限位置之间做往复的运动。如果这时仍将曲柄2作为主动件,而修改连杆3的长度,使L3=50mm,从图4可以看出以连杆2的长度为界限的两条线段已经和曲柄2的活动半径相交于E、F两点,则曲柄运动到下部的E点时,曲柄2已经无法再带动连杆3以及滑块4进行运动,从模拟的运动轨迹也可以明显的看出运动的极限位置(图5,E点)。同样如果将曲柄2的运动方向反转,又可以得到另外一个极限位置点F。(参照图4、图5)。
3 机构运动中主要点位的运动过程分析
依照之前定义的各项参数,此机构有确定的运动,接下来我们分析当曲柄2作为主动件并且以匀角速度运转的情况下,滑块4在水平面上面做直线运动的情况,包括位移、速度、加速度等方面的特性,这里先给定曲柄2一个匀速运动,1度/秒,此时对滑块4进行位移、速度、加速度的分析。分析输出的界面如图6所示(参照图6、图7)。
这里的J006就是在UG中定义的移动副,分别对应输出位移(displacement)、速度(velocity)、加速度(acceleration)。点击ok并且选择graph使用NX导出的时候得到如下的结果:位移(见图7)、速度(见图8)、加速度(见图9)
从以上的结果可以看出,当给定曲柄匀速运动,滑块运动的速度、加速度变化比较大对机构的冲击也会比较大,同样的以滑块作为主动件也是类似的结果。所以可以通过改变主动件的驱动形式,如给定三角函数运动或者其他的运动函数可以减缓滑块的速度、加速度变化从而减少机构的刚性冲击,延长机构的使用寿命。
结语
UGNX的运动分析功能将很多之前繁琐的分析计算变得非常简化与直观,减少了很多的计算量,尤其是当机构复杂,多个构件机构综合到一起的时候,根本无法预计出运动的情况以及各点的运动特性。而本文则通过最简单的曲柄滑块机构为例介绍了从定义构件,建立运动副,给定驱动,运动分析一直到输出分析结果的方法,借助UGNX软件,相信许多复杂的结构分析都会变得简单、直观,并节省大量的人、财、物力,设计的机构也会更加的稳定与完整。
[参考文献]
[1] 机械设计手册编委会.机械设计手册[M].机械工业出版社,2005年3月.
[2] 周开勤.机械零件手册[M].高等教育出版社,2001年7月第5版.
[3] Unigraphics Solutions Inc.UG运动分析培训教程[M].清华大学出版社,2002年9月.
