基于雷达的近海船舶分布式监控系统
2008-01-29,,,
,,,
(1.大连海事大学航海学院,辽宁 大连 116026;2.大连海事大学 计算机科学与技术学院,辽宁 大连 116026)
实现船岸之间的数据交换和通信是船舶监控系统首要解决的问题。
小型船舶(如渔船)的通信、导航设备落后,已有的方法[1-3]都难以实现对其实时监控。因此考虑将ECDIS与嵌入式雷达相结合,构建近海船舶分布式监控系统。
1 系统架构
系统由若干个固定在近海沿岸的雷达监控站和一个中心监控系统组成。雷达监控站采用1台嵌入式雷达构成,将雷达图像存储、压缩后,利用CDMA/GPRS通信技术向中心发送雷达图像,并接收中心发来的调度和控制命令。
中心监控系统是整个系统的数据中心和通信控制中心,以电子海图显示与信息系统(electronic chart display and information system,ECDIS)为基础平台,通过Internet网络技术,接收雷达监控站发来的雷达图像,解压后叠加在电子海图上。然后实现对目标回波的定位;在电子海图上划定报警线,对越过报警线的目标回波进行报警;向雷达监控站发送指令,实现远程遥控。
雷达站监控平台通过CDMA/GPRS移动电话网接入Internet,中心监控系统通过ADSL接入Internet,中心监控系统和雷达站组成基于Internet的网络结构。这样,利用Internet网络技术、CDMA/GPRS通信技术、雷达技术和电子海图技术,建立了近海船舶分布式监控系统。
2 中心监控系统工作原理
中心监控系统的基础平台是一个符合国际标准的电子海图显示与信息系统,该平台对符合IHO S—57国际标准[4]的电子海图实现即插即用,海图显示性能符合IHO S—52规范[5]。依据S—52表示库开发的系统具有海图显示与控制(包括放大、缩小、漫游和信息分层、多幅海图的无缝拼接、雷达图象叠加)、临时标绘(包括点、线、圆形、多边形、文字等)等功能,并可实现航行状态监控、数据通信[6](连接ARPA/雷达、AIS/GPS、CDMA/GPRS等通信导航设备)、航行安全报警、海图计算与测量、航线设计、避碰决策支持(DCPA/BCPA/TCPA计算)、台风和潮汐信息、海上地理信息查询、海图改正等功能,系统功能见图1。

图1 系统功能框
依据IHO S—57国际标准,将海图改正信息(包括码头、航道、锚地、水深、助航标志、碍航物等物标的变更信息等)制成标准的“海图改正数据集”;中心指挥系统还可依据《航海通告》对电子海图进行改正,以使系统使用的电子海图保持最新。
中心监控系统实现了雷达视频图像与电子海图在不同雷达量程、不同显示比例尺、不同显示模式情况下的坐标匹配和同步[7]。雷达监控站将雷达图像按一定的周期通过CDMA/GPRS通讯模块发送到监控中心。中心监控系统监视到有船舶进入报警区时,自动以声、形、文字等方式报警,同时持续跟踪并记录时间和图像。
监控中心采用FTP协议向雷达监控站发送指令文件,每个雷达监控站以其主控计算机的IP作为唯一标识。指令包括2种类型:雷达操作指令和文件发送频率指令,用于控制雷达(如改变量程等)和改变文件发送频率。
3 嵌入式雷达控制器件设计
雷达监控站选用的是日本KODEN公司生产的型号为MD-3641/3642雷达,设计开发的嵌入式雷达控制单元采用美国ATMEL公司生产的高档8位单片机AT89C4051作为CPU,硬件开发平台为ETX(embedded technology extended)嵌入式PC[8]。
雷达控制器是遥控雷达的主要组成部分,功能是根据约定或数据处理计算机送来的指令给雷达各受控分系统传送各种控制码,配合定时器协调雷达各分系统同步工作;自动控制雷达系统各工作方式之间的快速转换;实现雷达系统监测(分系统BITE监测);产生随机跳频功能;产生模拟信号。
图2是以ETX嵌入式PC构成的雷达控制器逻辑框图,由于大量采用数字信号处理器(digital signal processing,DSP)和现场可编程门阵列(field-programmable gate array,FPGA)进行模块设计,实际的雷达控制器是一个以ETX嵌入式PC为核心的分布式处理系统。

图2 嵌入式雷达控制器逻辑框
3.1 模块功能
1) ETX嵌入式PC。雷达控制器的核心部件,实时处理各种输入输出的信号,根据雷达系统的要求,把各种指令通过指令分配送给各受控分系统,使处理信息的速度、容量、灵活性有了很大的提高,也使雷达控制器的性能得到了提升。
2) 接收控制器。接收定时、反干扰、伺服、和数据处理计算机等分系统送来的各种信号,经排序,送到ETX嵌入式PC和指令分配器中进行处理。
3) 指令分配器。接收ETX嵌入式PC和接收控制器送来的各种信息,并按照一定的时序把各种宏指令和状态指令发送到各受控分系统。
4) 目标检测器。用于分调状态下,给接收机提供若干条固定波位的航迹,用于调试和检查接收机、信号处理、目标提取、计算机及软件。
5) 全机监测。对雷达中各分系统的故障信息进行分析、汇总并送显示器显示,让监控中心的操作员及时了解雷达工作状态及故障情况;对接收分系统传送的故障信息必须实时采集(每个波位进行一次),把信息及时送到ETX嵌入式PC,通过分析进行接收通道的切换。
6) 图像压缩、发送。雷达图象经压缩后,由网络发送模块发往监控中心。
根据雷达控制器功能需求,加进了网络处理和文件处理功能。分别设计了4个任务:初始化任务、指令重组分发任务、网络接收任务、数据转存任务。采用轮循(round-robin)任务调度机制,任务之间、任务和中断间同步使用二进制信号灯,任务间通讯采用共享存储区方式,存储区的设计采用“乒乓”缓冲数据结构[9]。
3.2 软件主要功能
1) 通过网络接收来自数据处理计算机送来的控制命令。
2) 响应定时中断,按照波位和区域及时对控制命令进行处理并将宏指令分发给各受控分系统。
3) 响应正北中断进行记数,在约定状态下,记到一定数时进行通道修正。
3.3 雷达控制软件模块
雷达控制软件模块的划分主要考虑模块的通用性、移植性和可扩充性。根据具体情况,将模块划分为网络通信模块、指令处理模块2类。
1) 网络通信模块的功能。绑定网卡,初始化发送方和接收方,及时接收由数据处理计算机送来的各种控制命令,数据包长度为不超过1.5 kb。
2) 指令处理模块的功能:响应定时中断,在指定的时间内,按照波位号和区域号将控制命令,组织成给雷达各受控分系统的宏指令,通过写并口送到相应的硬件端口。
中断和任务间的通讯采用二进制信号灯。对网络的编程在传输层上进行,网络协议采用UDP/IP协议,用C语言编程,图3是嵌入式软件流程图。

图3 嵌入式软件流程图
4 实例
系统应用于辽东湾海渔船监控。在辽东湾西起小坞渔港、东至将军石等地建立9个雷达监控站,在营口设立指挥中心。图4是中心监控系统主界面。图5是西河口雷达监控站发来的3 n mile量程雷达与电子海图叠加后的图像,中心监控系统发现有渔船越过报警线进行报警,图中亮白色标绘的是渔船回波的边缘。
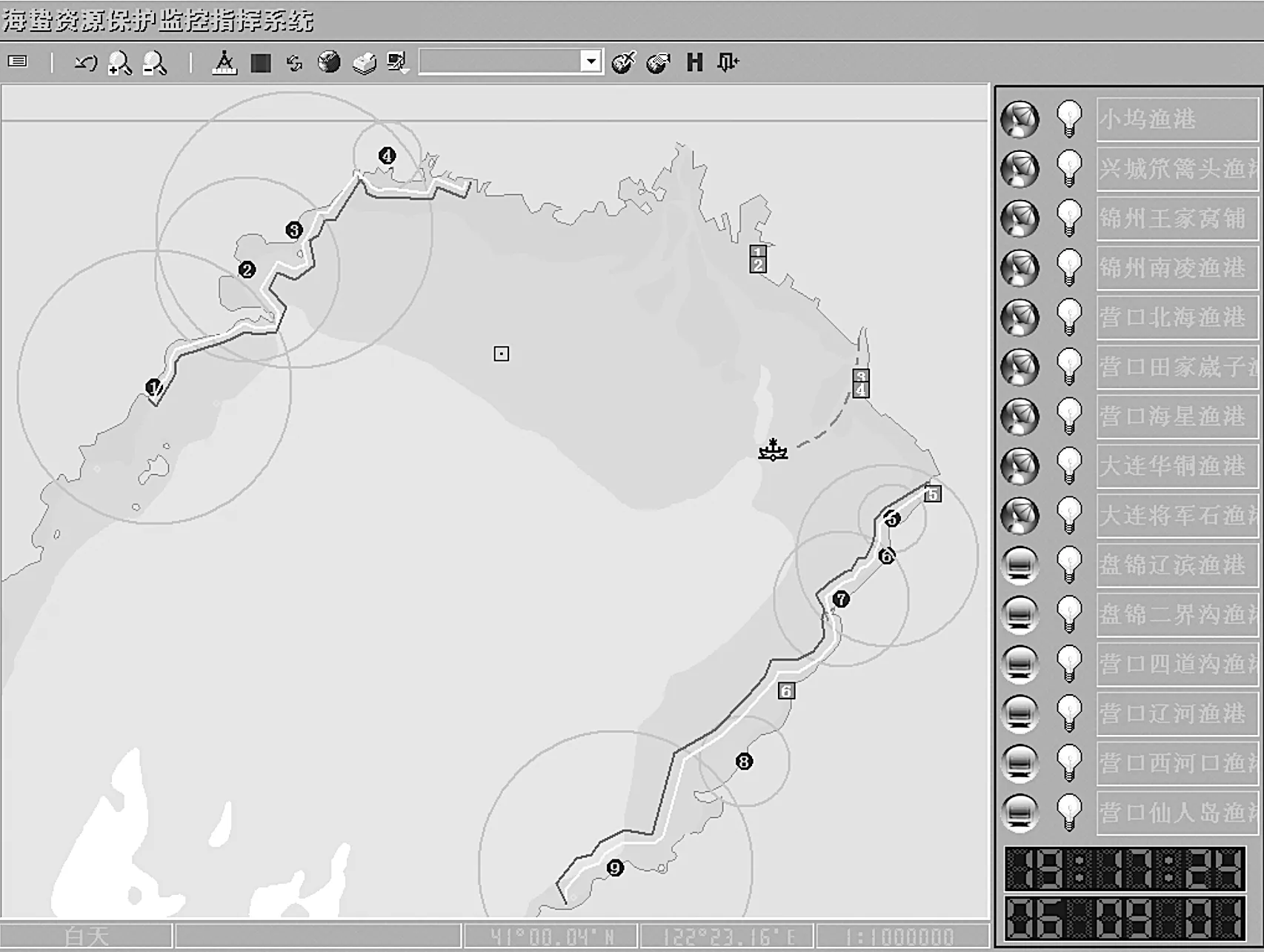
图4 中心监控系统主界

图5 系统报警界面
5 结束语
将ECDIS和雷达相结合应用于导航领域外的近海船舶监控,通过通用网络平台(Internet)传输图像、文字信息和指令,建立了近海船舶分布式监控系统。通过部署多个雷达监控站,解决了近海小型船舶难于监控的问题。
以嵌入式芯片为核心构成远程遥控雷达,除完成雷达的基本功能外,通过接收远程控制指令,扩展了雷达远程监控能力。下一步研究的重点是继续完善嵌入式雷达软硬件功能,拟采用16位或32位的微处理器来提高性能。
[1] 李顺亮,张均东.基于Inmarsat-Fleet77的船岸综合监控系统的设计与实现[J].船海工程,2006,35(1):67-69.
[2] 曹 辉,张均东.视频技术在船舶领域中的研究与应用[J].船海工程,2007,36(3):122-124.
[3] 刘传润,张来保.珠江口水域AIS基站的设计[J].大连海事大学学报,2007,33(1):64-66.
[4] IHO S-57 IHO Transfer Standard for Digital Hydrographic Data Edition 3.1[S].International Hydrographic Bureau MONACO, 2000.
[5] IHO S-52 IHO Specifications for Chart Content and Display Aspects of ECDIS Edition 5.0[S].International Hydrographic Bureau MONACO, 1996.
[6] 赵丽宁,郝江凌.电子海图导航系统多设备接口动态链接库的开发[J].大连海事大学学报,2003,29(4):18-20.
[7] 周 莉,华承相.雷达图像与电子海图的实时匹配算法[J].中国航海, 2006(4):55-56.
[8] 张晓平.基于嵌入式系统的雷达控制器[J].现代雷达, 2004(4):58-59.
[9] 费利那 A,斯塔德F A.雷达数据处理[M].北京:国防工业出版社,1992.
