视觉障碍条件下行人碰撞事故场景自动紧急制动触发策略分析
2025-03-02蔡鸿瑜韩勇何勇孟昕














【摘要】为了避免在视觉障碍紧急工况下车辆碰撞行人事故的发生,针对存在视觉障碍的典型车辆-行人自动紧急制动(AEB)测试场景,提出了3种具有不同碰撞时间(TTC)和制动减速度的AEB触发策略(保守型、法规型、激进型),在2起典型视觉障碍事故场景条件下,基于PreScan、MATLAB/Simulink、CarSim等仿真平台建立事故场景和车辆动力学模型,并搭建AEB策略模型,对比分析3种AEB触发策略的制动有效性。结果表明:所搭建的AEB模型均能在典型行人碰撞场景中实现避撞,其中法规型制动策略规避效果最佳。
主题词:弱势道路使用者 视觉障碍 典型场景 自动紧急制动
中图分类号:U461.91" "文献标志码:A" "DOI: 10.19620/j.cnki.1000-3703.20221098
Analysis of AEB Triggering Strategies for Pedestrian Collision Scenarios Based on Visual Obstacle Conditions
Cai Hongyu1, Han Yong1,2, He Yong3, Meng Xin1
(1. Xiamen University of Technology, Xiamen 361024; 2. Fujian Key Laboratory of Advanced Design and Manufacturing of Buses, Xiamen 361024; 3. Xiamen Huaxia University, Xiamen 361024)
【Abstract】To avoid the incidence of vehicle - pedestrian collision accidents under emergency scenarios involving visual impairments, this study focuses on typical vehicle-pedestrian Automatic Emergency Braking (AEB) test scenarios with visual impediments. Three AEB triggering strategies, namely the conservative, regulatory, and aggressive strategies, are proposed, each characterized by distinct Time to Collision (TTC) values and braking deceleration profiles. Under the circumstances of two prototypical accident scenarios with visual impairments, accident scenarios and vehicle dynamics models are constructed using simulation platforms such as PreScan, MATLAB/Simulink, and CarSim. Subsequently, an AEB strategy model is developed. A comparative analysis is then conducted to evaluate the braking effectiveness of the three AEB triggering strategies. The results show that all the AEB models in this study can achieve collision avoidance in typical vehicle-pedestrian accident scenarios, with the regulatory braking strategy having the best avoidance effect.
Key words: Vulnerable Road User (VRU), Visual obstacle, Typical scenarios, Autonomous Emergency Braking (AEB)
【引用格式】 蔡鸿瑜, 韩勇, 何勇, 等. 视觉障碍条件下行人碰撞事故场景自动紧急制动触发策略分析[J]. 汽车技术, 202X(XX): XX-XX.
CAI H Y, HAN Y, HE Y, et al. Analysis of AEB Triggering Strategies for Pedestrian Collision Scenarios Based on Visual Obstacles[J]. Automobile Technology, 202X(XX): XX-XX.
1 前言
道路交通安全问题的严重性[1-2]促进了汽车主动安全技术的快速发展,自动紧急制动(Autonomous Emergency Braking,AEB)系统作为典型的汽车主动安全技术,可以辅助驾驶员规避碰撞事故,进而减少交通事故造成的人员伤亡[3]。为了加速AEB系统的普及,欧洲经济委员会制定了AEB系统的法规草案。自2015年起,欧洲新车评价规程(European New Car Assessment Programme,Euro-NCAP)和中国新车评价规程(China New Car Assessment Program,C-NCAP)开始着力研究应用于AEB测试的典型场景[4-7]。研究人员在典型交通事故场景开发过程中,基于提取的道路使用者信息、车辆信息和影响交通事故的因素等特征,采用聚类分析方法,以相似性或差异性为标准将目标群体分组,进而统计获得真实事故场景发生频率[8-11]。谭正平等通过群决策理论从交通事故数据中分析提取了16类典型的汽车与行人冲突场景[12]。金钱钱等基于弱势道路使用者交通事故视频数据库(VRU TRaffic Accident database with Video,VRU-TRAVi)提取事故视频特征,采用聚类分析方法得到7类行人-车辆典型碰撞场景[13]。韩勇等采用具有完整视频信息和弱势道路使用者(Vulnerable Road User,VRU)损伤信息的深度事故数据分析了AEB系统的传感器视场角(Field Of View,FOV)对事故规避率的影响,结果表明,事故规避率随着FOV的增大而提高[14]。刘福聚等基于中国道路交通事故深入研究(China In-Depth Accident Study,CIDAS)数据库建立测试场景,发现AEB系统的碰撞时间(Time To Collision,TTC)设置为1 s、探测角度为40°和制动减速度为0.9 g条件下,可减少58.4%行人事故的发生[15]。
综上,学者们主要关注汽车与行人碰撞场景的聚类研究和汽车AEB系统参数优化研究。然而,AEB系统在汽车和行人典型危险场景中的适应性研究更是AEB预期功能研究的关键。传统AEB感知系统在普通场景下能够满足预期的功能需求,但在典型危险场景下能否满足预期的功能需求还有待验证。目前,学者对AEB感知系统的预期功能研究较少,缺乏针对中国道路环境下汽车和行人典型危险场景的AEB系统参数的适用性研究。本文结合前期提取的典型碰撞前场景[13],基于VRU-TRAVi数据库筛选了2起符合典型碰撞前场景的车辆碰撞行人事故,利用PreScan、MATLAB/Simulink、CarSim等软件,仿真验证3种不同AEB策略的预期功能,作为后续AEB感知系统参数优化研究的基础。
2 AEB系统参数
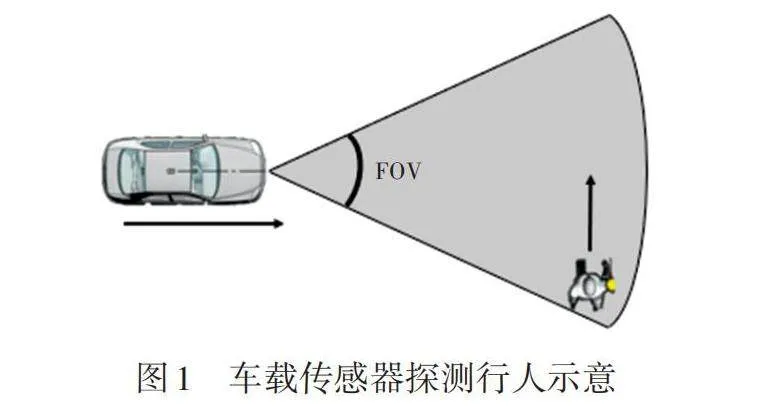
为了解AEB系统介入过程中的车辆运动状态和行人状态,有必要进一步研究车辆制动过程中的制动距离。车载传感器探测行人的过程如图1所示,其中车辆在机动车道上行驶,行人切入机动车道。
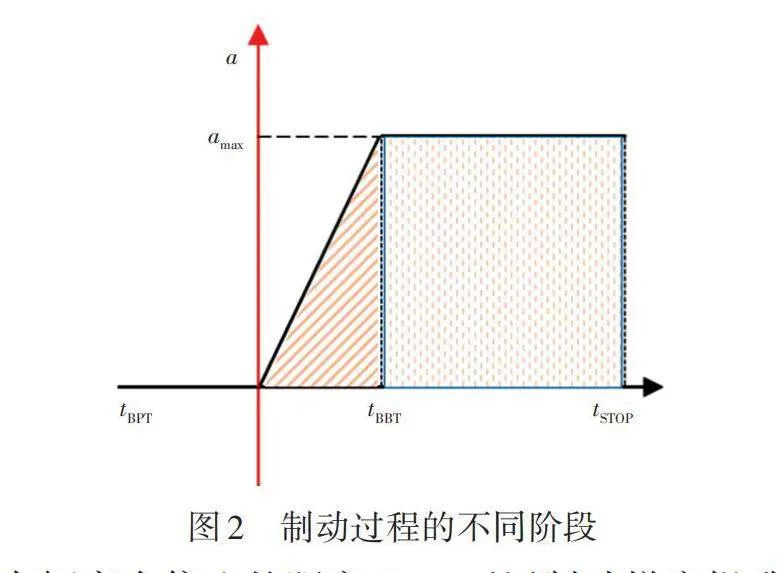
图2所示为AEB系统介入后制动过程的不同阶段,其中tBPT为消除制动间隙所需时间,tBBT为制动力从0增大到峰值所需时间,tSTOP为车辆以最大减速度恒定制动直到停车所需时间。TTC是AEB系统中触发车辆减速指令的重要指标。在以往的研究中,TTC阈值是AEB系统激活的基础,极大地影响事故规避程度。考虑到TTC对VRU的适用性,根据车辆与VRU间的相对距离设置不同的制动减速度,并结合法规定义TTC在制动触发中的优先级。此外,在AEB系统干预的过程中,从AEB系统发出制动指令到制动间隙被清除的时间通常约为0.1 s,制动力从0开始增大到最大值所需时间tBBT通常为0.15 s[16]。
车辆完全停止的距离dvehicle可用制动梯度提升和最大恒定减速度两个阶段的行驶距离计算得出[17]:
dvehicle=dBBT+dSTOP[=v202amax+v0tBBT2-amaxt2BBT24] (1)
式中:dBBT为制动力从零增大到峰值所行驶的距离,dSTOP为车辆以最大减速度恒定制动直到停车所行驶的距离,v0为车辆初始速度,amax=μg为车辆最大减速度,μ为制动强度。
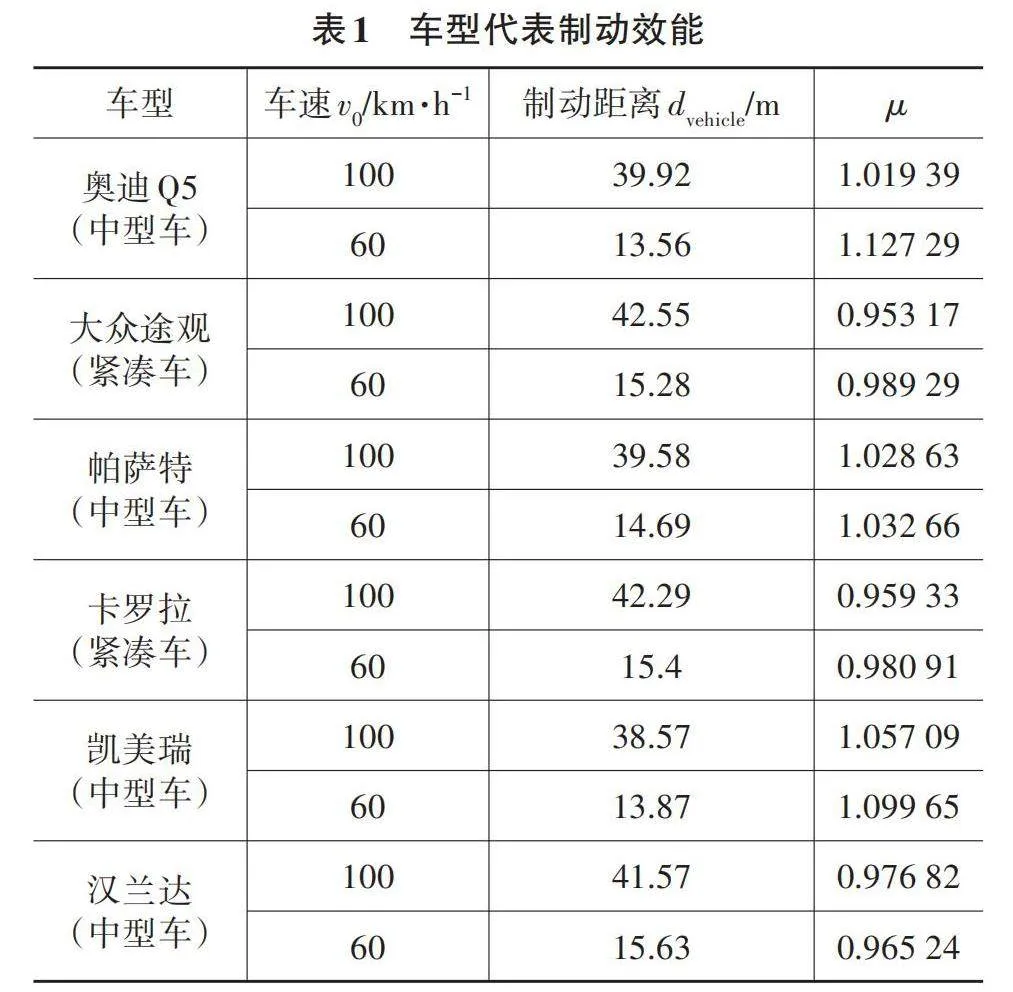
考虑到AEB系统在实际应用中的有效性,参考不同级别典型车辆的制动效能数据,计算相应制动强度,如表1所示,得到μ的范围为0.95~1.10,将其作为本文减速度a的参考。
AEB系统需介入时的碰撞时间tTTC和AEB系统介入期间行人移动的距离(目标行人与碰撞点的距离)dPed分别为:
tTTC=-dvel/v0 (2)
dPed=tTTCvPed (3)
式中:dvel为行人与车辆的纵向距离,vPed为行人移动速度。
触发AEB系统的TTC阈值tTTCT包含消除制动间隙时间和制动力达到峰值时间:
tTTCT=tBBT+tBPT (4)
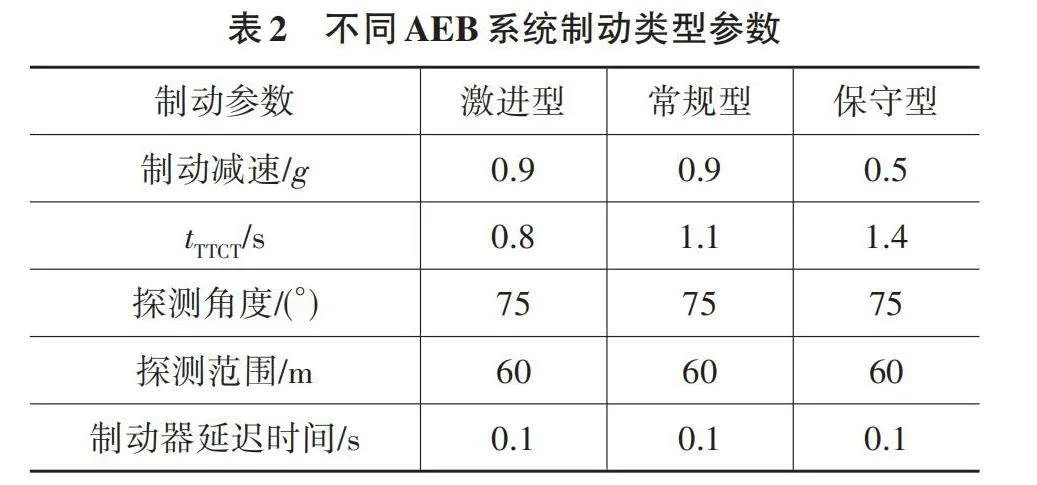
本文设定TTC的最大值为1.4 s,最小值为0.8 s[18]。对于制动减速度a,当AEB系统干预时,激进型策略的特点是制动力更大,而保守型策略则以较小的减速度缓慢制动,两者最大制动减速度均与制动器及地面的摩擦因数有关[19]。参考学者对AEB系统制动减速度的研究,本文将最大制动减速度设置为0.9 g,最小制动减速度设置为0.5 g[20]。要确定传感器的FOV,应考虑车辆的最低行驶速度。结合Euro-NCAP AEB-VRU测试中最低速度所需的FOV,设置FOV为75°[19]。此外,考虑到实车毫米波雷达传感器的检测性能,本文使用的传感器探测距离设定为60 m。因此,基于目前AEB系统的现状和其他研究人员对不同参数的研究结果,设定如表2所示的参数特征。
3 AEB控制模型
文献[21]对目前几种典型AEB模型(Mazda模型、Honda模型、Berkeley模型、SeungwukMoon模型、TTC模型[22-25])进行对比分析后认为,纵向避撞过程中AEB避撞模型应满足“能实现避免碰撞”和“不对驾驶员正常驾驶产生干扰”两个要求,在不干扰驾驶员正常驾驶层面,TTC模型效果最好,而在纵向避撞过程中,以上几种模型主要表现为保守型和激进型两种。因此,在考虑输入参数少、对驾驶员干扰小、参数可调性层面以及两轮车目标较小的情况下,本文所设计的AEB模块首先对输入的传感器测量数据进行分析计算,得到预碰撞时间TTC。
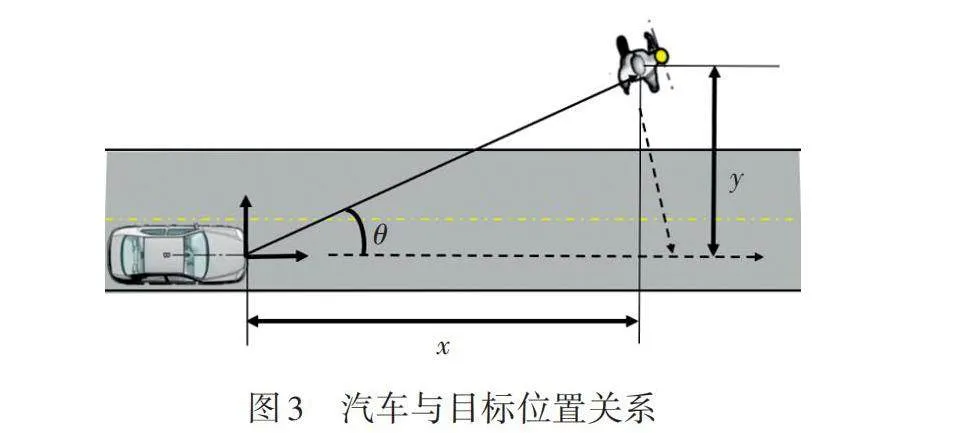
直线行驶时汽车与目标位置的关系如图3所示,目标质心与自车的纵向距离x和横向距离y分别为:
[x=ρr·cosθy=ρr·sinθ] (5)
式中:ρr为车辆与目标的直线距离,θ为汽车行驶方向和车辆质心与目标行人质心连线的夹角。
将切向速度vt和径向速度vr进行转化得到目标相对于自车的纵向速度vx和横向速度vy:
[vx=vrcosθ-vtsinθvy=vrsinθ+vtcosθ] (6)
碰撞时间模型即TTC模型,指直线行驶的自车与前方目标发生碰撞的时间:
tTTC=-x/v (7)
式中:v为自车行驶速度。
综上,可得纵向碰撞时间tTTCx与横向碰撞时间tTTCy:
[tTTCx=-ρr∙cosθvrcosθ-vtsinθ-vtTTCy=-ρr∙sinθvrcosθ-vtsinθ] (8)
ΔtTTCy为上一时刻tTTCy与下一刻的差值,通过ΔtTTCy的值对传感器识别到的目标进行判断,若ΔtTTCy恒等于0,则可判定目标对自车不存在威胁。
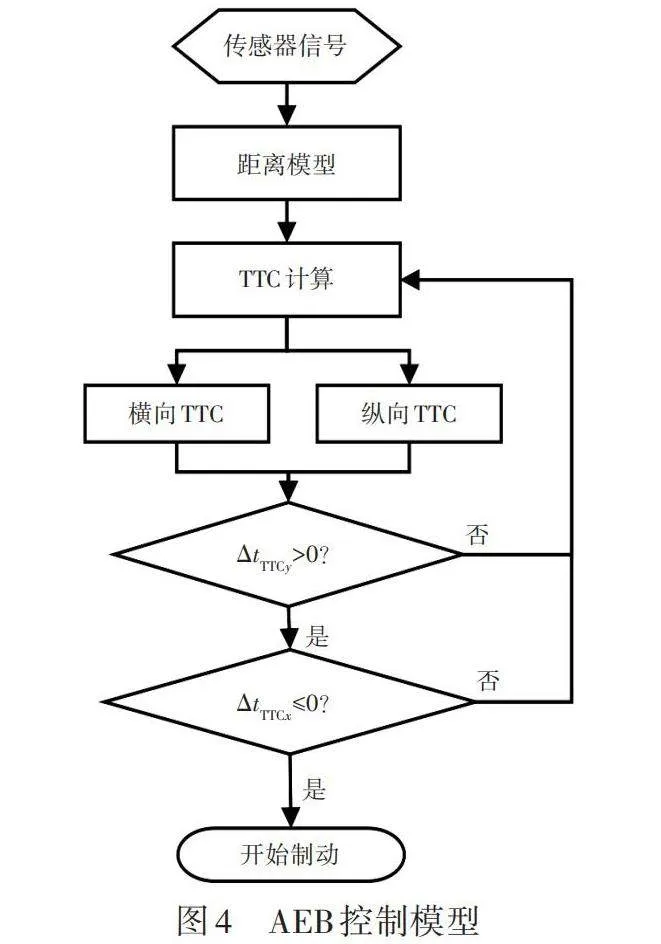
对于tTTCx,结合不同AEB系统的需求判定车辆何时开始制动,即判定目标存在威胁且满足如下不等式时车辆开始制动:
ΔtTTCx=tTTCx-tTTCT≤0 (9)
根据上述数学模型搭建如图4所示的基于TTC的AEB控制策略的仿真模型。
首先利用PreScan搭建事故场景并在车辆上设置传感器,同时在CarSim中设置车辆动力学模型,最后在MATLAB/Simulink中连接搭建的TTC距离模型、危险状况判断模块以及节气门/制动器判断模块。当TTC满足AEB触发条件时,AEB模块输出期望的制动减速度至CarSim动力学模块进行车辆制动控制,过程如图5所示。
图6所示为3种不同触发策略下的实际制动减速度和期望制动减速度。可以看出,实际制动减速度与期望制动减速度非常接近,误差控制在4.5%以内,符合制动减速度的要求。
4 仿真结果及分析
4.1 事故仿真结果
为了验证不同触发策略下AEB系统制动控制的有效性,结合前期基于聚类得到的7类行人-车辆碰撞前典型场景,如图7所示[13],选择占比高的场景2(占比20.67%)开展仿真,考虑到该场景下行人自近端横穿道路,另选取行人自远端横穿道路的场景6作为对照。
进一步从VRU-TRAVi中筛选出2起典型场景下行人与车辆碰撞的深度事故案例[26]。
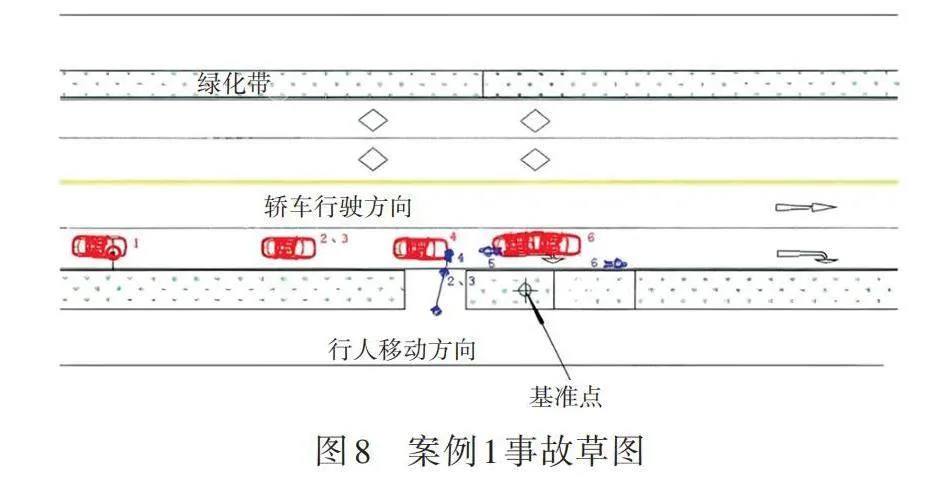
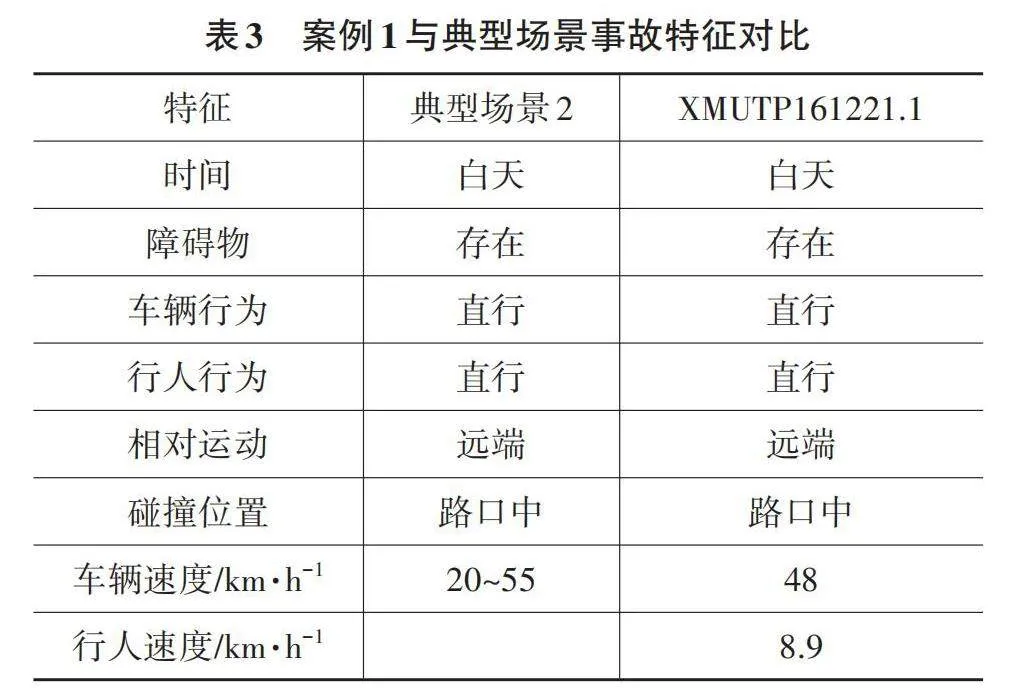
案例1:事故编号为XMUTP161221.1,事故草图如图8所示,事故发生在北侧第一条机动车道上,一辆由东向西行驶的轿车与一名从绿化带由北向南穿行的行人相撞。表3所示为事故特征与典型场景2的对比结果,案例1符合图7中的典型场景2。
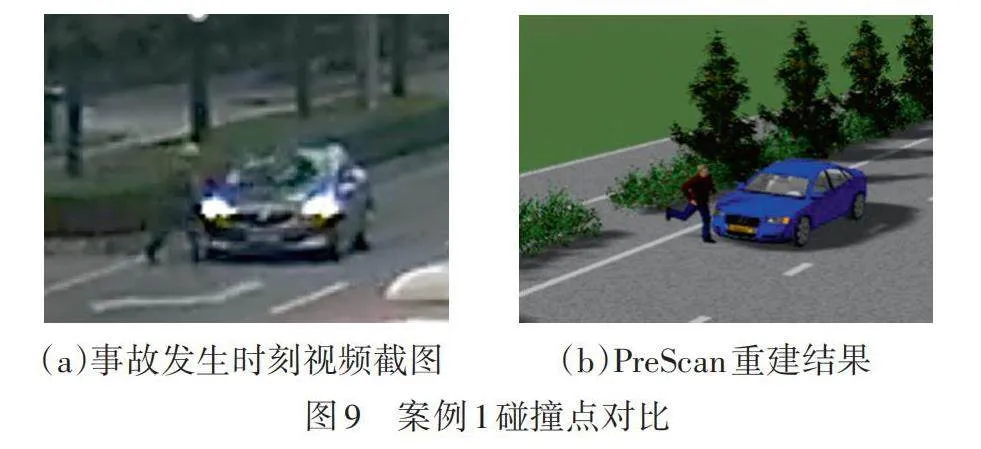
图9显示了基于PreScan重建的车辆和行人碰撞位置与真实事故视频的对比结果,PreScan中行人和车辆的碰撞点与真实事故基本匹配。
结合案例1对3种制动策略的AEB参数进行有效性验证,结果如图10所示。
在保守型、法规型、激进型制动策略下,车辆分别在距离行人17.02 m、12.58 m、9.35 m时开始由13.3 m/s的速度进行制动,制动结束后车辆最终分别在距离行人1.61 m、4.30 m、1.02 m的位置停止。案例1中3种AEB制动策略均规避了碰撞,行人典型事故碰撞前场景1验证有效。
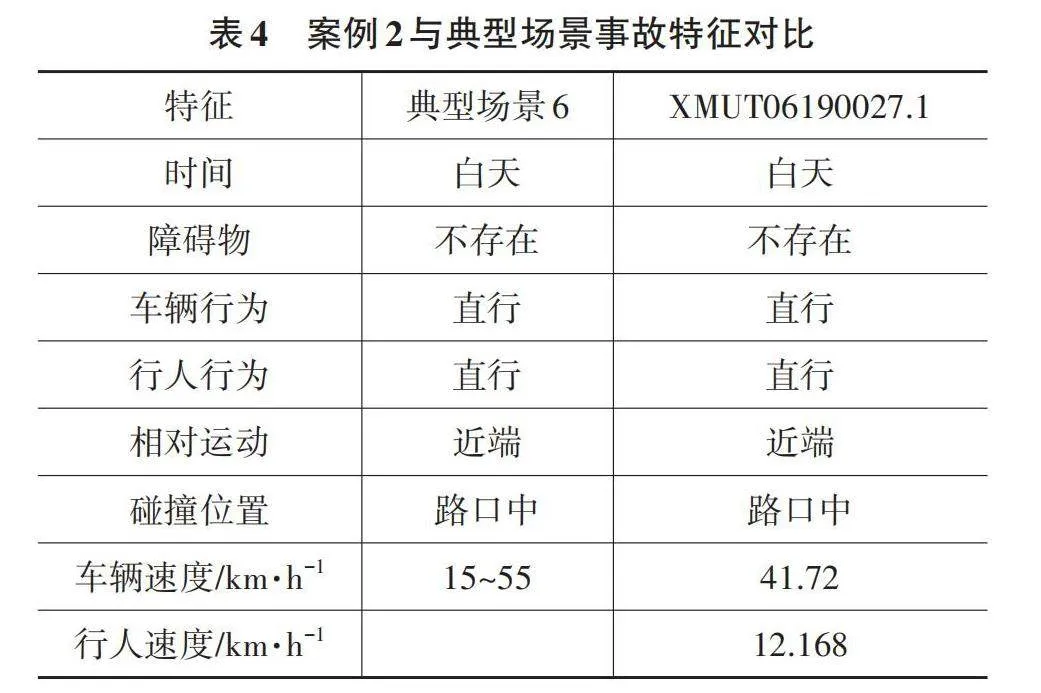
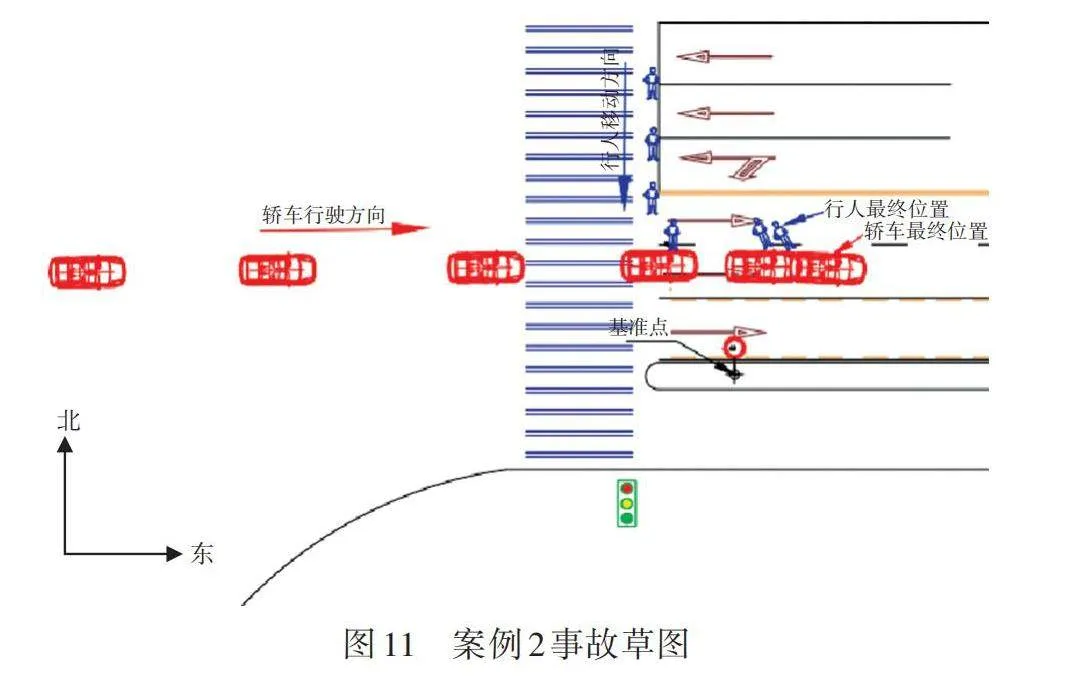
案例2:事故编号为XMUT06190027.1,事故草图如图11所示,该事故发生在某交叉路口,一辆由西向东行驶的轿车与一名由北向南移动的行人相撞,该行人行进路线被等待的车辆遮挡。表4所示为事故特征与典型场景6的对比结果,案例2符合图7所示的典型场景6。
图12所示为基于PreScan重建的车辆和行人碰撞位置与真实事故视频的对比结果,PreScan中车辆和行人碰撞时刻的相对位置与真实事故基本匹配。
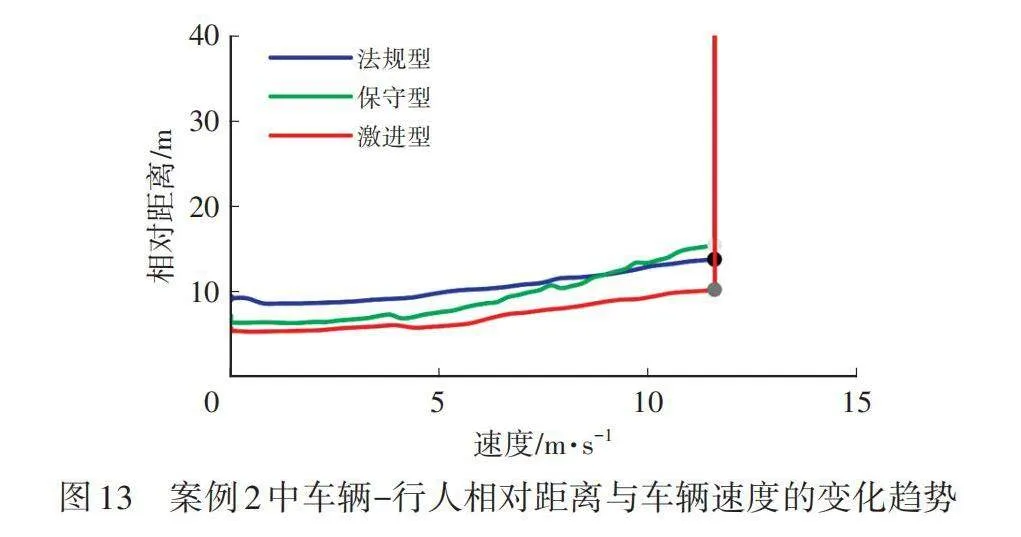
结合案例2对3种制动策略的AEB参数进行有效性验证,结果如图13所示。
在保守型、法规型、激进型制动策略下,车辆分别在距离行人15.48 m、13.87 m、10.27 m时开始从11.59 m/s的速度进行制动,最终分别在距离行人6.40 m、9.23 m、5.43 m的位置停止。案例2中3种AEB制动策略均规避了碰撞,行人典型事故碰撞前场景3验证有效。
4.2 结果分析
传感器能识别的横向宽度随着行人与车辆纵向相对距离的减小而减小。在行人与车辆距离较近时,车辆前方的行人不在传感器的检测范围,但本文设置了制动器延迟时间,行人离开检测范围后,制动器仍会保持制动状态0.1 s。
联系案例1与案例2可知:激进型与法规型制动策略由于制动减速度相同,故速度减小的速率相似,保守型制动策略速度变化相对平缓;激进型、法规型和保守型制动策略下制动开始时刻的相对距离依次增大,制动时间的减小导致制动结束时激进型制动策略的仿真结果中车辆与目标行人的相对距离最小,且案例1中3种制动策略制动结束时车辆与目标行人的相对距离均小于案例2。
图14所示为3种AEB策略在传感器探测到行人后的TTC变化情况,2例事故中TTC在开始的几秒均出现降低趋势,随着车辆与行人的距离不断减小,TTC一旦达到阈值,车辆即开始制动,TTC变化趋势变小,当速度趋于零时,TTC趋近于无穷大,表示碰撞不会发生。
对比案例1与案例2的TTC,一方面,案例1的车速较案例2高,另一方面,由于传感器输出的TTC为纵向TTC,与车辆自身的速度相关性较大,所以案例1中TTC的变化过程时长较案例2短。
案例1在激进型制动策略下,由于行人在车辆前端离开了传感器的检测范围,所以在制动还未停止时,传感器已经识别不到行人,故案例1激进型制动策略的TTC没有出现剧增的情况。
5 结束语
本文基于VRU-TRAVi已建立的7类行人-车辆事故的碰撞前场景,选取具有视觉障碍且占比最高的碰撞前典型场景2,以及具有对照关系的碰撞前典型场景6,再从事故数据库中筛选出符合以上场景的2起事故,通过仿真平台建立的车辆动力学模型以及AEB算法对筛选的2起真实事故进行3种不同制动策略下的AEB系统有效性分析,结果表明,3种AEB系统制动策略在筛选的2起真实事故案例中均能实现避撞,故在保证安全性的前提下,可以有效实现不同类型的避撞需求。
2个案例中,车速和行人速度不同,结束制动时目标行人与自车的相对距离也不相同,故后续可以针对真实事故中行人速度和车辆速度对AEB系统作用下事故规避率的影响展开研究。同时,本文局限于车辆直线行驶工况,后续将考虑结合转向措施对避撞策略进行优化,以及如何使避撞策略用于车辆转向行驶的情况。
参 考 文 献
[1] World Health Organization. Global Status Report on Road Safety 2018[R]. Geneva, Switzerland: World Health Organization, 2018.
[2] 中华人民共和国国家统计局. 中国统计年鉴[M]. 北京: 中国统计出版社, 2020.
National Bureau of Statistics. Chinese Statistical Yearbook[M]. Beijing, China: Chinese Statistical Press, 2020.
[3] 刘永涛, 吕凯光, 赵俊玮, 等. 基于人、车、路和环境的AEB控制策略发展研究综述[J]. 汽车技术, 2021(5): 1-8.
LIU Y T, LÜ K G, ZHAO J W, et al. Research Review on Development of AEB Control Strategy Based on Human, Vehicle, Road and Environment[J]. Automobile Technology, 2021(5): 1-8.
[4] Euro NCAP. Test Protocol -AEB VRU Systems (Version 1.0.1) [S/OL]. Leuven, Belgium: Euro NCAP, 2015. https://cdn.euroncap.com/media/21509/euro-ncap-aeb-vru-test-protocol-v101.pdf.
[5] Euro NCAP. Euro NCAP Test Protocol-AEB VRU Systems (Version 3.0.4) [S/OL]. Leuven, Belgium: Euro NCAP, 2021. https://cdn.euroncap.com/media/62795/euro-ncap-aeb-vru-test-protocol-v304.pdf.
[6] 中国汽车技术研究中心有限公司. C-NCAP管理规则(2018年版)[S/OL]. 天津: 中国汽车技术研究中心有限公司, 2018. http://www.c-ncap.org/cms/files/cncap-regulation-2018.pdf.
China Automotive Technology and Research Center Co., Ltd.. C-NCAP Management Regulation (2018 Edition)[S/OL]. Tianjin: China Automotive Technology and Research Center Co., Ltd., 2018. http://www.c-ncap.org/cms/files/cncap-regulation-2018.pdf.
[7] 中国汽车技术研究中心有限公司. C-NCAP管理规则(2021年版 )[S/OL]. 天津: 中国汽车技术研究中心有限公司, 2021. http://www.cncap.org.cn/cms/picture/3573800030 76288512.pdf.
China Automotive Technology and Research Center Co., Ltd.. C-NCAP Management Regulation (2021 Edition)[S/OL]. Tianjin: China Automotive Technology and Research Center Co., Ltd., 2021. http://www.cncap.org.cn/cms/picture/357380003076288512.pdf.
[8] SUN M, SUN X D, SHAN D H. Pedestrian Crash Analysis with Latent Class Clustering Method[J]. Accident Analysis and Prevention, 2019, 124: 50-57.
[9] PAN D, HAN Y, JIN Q Q, et al. Study of Typical Electric Two-Wheelers Pre-Crash Scenarios Using K-Medoids Clustering Methodology Based on Video Recordings in China[J]. Accident Analysis and Prevention, 2021, 160.
[10] ROUSSEEUW P J. Silhouettes: A Graphical Aid to the Interpretation and Validation of Cluster Analysis[J]. Journal of Computational and Applied Mathematics, 1987, 20: 53-65.
[11] BATOOL F. Optimum Average Silhouette Width Clustering Methods[D]. London, UK: University College London, 2019.
[12] 谭正平, 车瑶栎, 肖凌云, 等. 面向自动驾驶的典型汽车与行人事故冲突场景研究[J]. 安全与环境学报, 2021, 21(4): 1573-1582.
TAN Z P, CHE Y Y, XIAO L Y, et al. Trace Analysis for the Typical Precrash Scenario between Car Vehicle and Pedestrian Caused by the Automatic Driving[J]. Journal of Safety and Environment, 2021, 21(4): 1573-1582.
[13] 金钱钱. 基于视频信息的行人与自行车典型场景提取及虚拟验证[D]. 厦门: 厦门理工学院, 2020.
JIN Q. Extraction and Virtual Verification of Typical Scenarios of Traffic Accidents for VRU Based on Video Information[D]. Xiamen: Xiamen University of Technology, 2020.
[14] 韩勇, 李永强, 许永虹, 等. 基于VRUs深度事故重建的AEB效能对头部损伤风险的影响[J]. 汽车安全与节能学报, 2021, 12(4): 490-498.
HAN Y, LI Y Q, XU Y H, et al. Effectiveness of AEB System for Head Injury Risk Based on VRUs in-Depth Accident Reconstruction[J]. Journal of Automotive Safety and Energy, 2021, 12(4): 490-498.
[15] 刘福聚, 王鹏, 陈吉光. 基于CIDAS乘用车行人事故的AEB系统参数研究[J]. 中国汽车, 2018(9): 26-29.
LIU F J, WANG P, CHEN J G. Research on the AEB System Parameters Based on Passenger Car-Pedestrian Accidents in CIDAS[J]. China Auto, 2018(9): 26-29.
[16] HAUS S H, SHERONY R, GABLER H C. Estimated Benefit of Automated Emergency Braking Systems for Vehicle-Pedestrian Crashes in the United States[J]. Traffic Injury Prevention, 2019, 20(S1): S171-S176.
[17] JEPPSSON H, LUBBE N. Simulating Automated Emergency Braking with and without Torricelli Vacuum Emergency Braking for Cyclists: Effect of Brake Deceleration and Sensor Field-of-View on Accidents, Injuries and Fatalities[J]. Accident Analysis and Prevention, 2020, 142.
[18] ROSEN E. Autonomous Emergency Braking for Vulnerable Road Users[C]// 2013 IRCOBI Conference. Gothenburg, Sweden: International Research Council on the Biomechanics of Injury, 2013: 618-627.
[19] TANAKA S, TERAOKA E Y M. Benefit Estimation of Active Safety Systems for Crossing-Pedestrian Scenarios[C]// FISITA World Automotive Congress. Maastricht, Netherlands: FISITA, 2014.
[20] HAMDANE H, SERRE T, MASSON C, et al. Issues and Challenges for Pedestrian Active Safety Systems Based on Real World Accidents[J]. Accident Analysis and Prevention, 2015, 82: 53-60.
[21] 吕凯光, 李旋, 韩天园, 等. 基于驾驶风格识别的AEB控制策略[J]. 汽车技术, 2021(5): 16-21.
LÜ K G, LI X, HAN T Y, et al. AEB Control Strategy Based on Driving Style Recognition[J]. Automobile Technology, 2021(5): 16-21.
[22] 胡远志, 吕章洁, 刘西. 基于PreScan的AEB系统纵向避撞算法及仿真验证[J]. 汽车安全与节能学报, 2017, 8(2): 136-142.
HU Y Z, LÜ Z J, LIU X. Algorithm and Simulation Verification of Longitudinal Collision Avoidance for Autonomous Emergency Break (AEB) System Based on PreScan[J]. Journal of Automotive Safety and Energy, 2017(2): 136-142.
[23] YOSHIDA H, AWANO S, NAGAI M, et al. Target Following Brake Control for Collision Avoidance Assist of Active Interface Vehicle[C]// 2006 SICE-ICASE International Joint Conference. Busan, South Korea: IEEE, 2006: 4436-4439.
[24] LIN M, YOON J, KIM B. Study of AEB System Algorithm Using GPS-Based Real-Time Measured Gradient[J]. Advanced Science and Technology Letters, 2015, 118: 37-41.
[25] KUSANO K D, GABLER H C. Method for Estimating Time to Collision at Braking in Real-World, Lead Vehicle Stopped Rear-End Crashes for Use in Pre-Crash System Design[J]. SAE International Journal of Passenger Cars-Mechanical Systems, 2011, 4(1): 435-443.
[26] LI Q, HAN Y, MIZUNO K, et al. Ground Landing Mechanisms in Vehicle to Pedestrian Impact Base on Accident Video Records[J]. SAE Technical Paper 2018-01-1044, 2018.
(责任编辑 斛 畔)
修改稿收到日期为2024年2月16日。
