典型含水率下菌草土壤—移栽触土部件离散元参数标定
2025-02-26叶大鹏林志强青家兴高宇轩吴逸腾谢立敏



摘要:为探究种植菌草的丘陵地区土壤间、土壤与移栽触土部件间相互作用的规律并获取其仿真参数,运用Hertz—Mindlin with JKR接触模型对特定的12%±1%和20%±1%的含水率土壤—移栽触土部件进行离散元参数标定。开展土壤堆积角物理试验、土球斜面滚动物理试验。以土壤颗粒间、土壤与移栽触土部件间的表面能、恢复系数、动摩擦系数、静摩擦系数为标定对象,设计旋转中心组合试验并以仿真的土壤堆积角、土球在65Mn板上滚动距离为响应值,采用Box—Behnken对试验数据回归分析,以实测的土壤堆积角、土球滚动距离为优化目标,采用两种典型含水率下土壤与触土材料(65Mn)的静摩擦系数为约束条件,得到两种典型含水率的土壤间、土壤与移栽触土部件的离散元参数:含水率分别为12%±1%、20%±1%时,土壤颗粒间表面能、恢复系数、动摩擦系数、静摩擦系数为11.042 J/m2和11.851 J/m2、0.412和0.574、0.093和0.129、0.994和1.009;土壤与触土部件表面能、恢复系数、动摩擦系数为5.046 J/m2、8.026 J/m2,0.362、0.388和0.066、0.07。为验证优化后离散元参数的准确性,开展验证试验得:两种典型含水率土壤仿真、物理堆积角相对误差为0.96%、0.95%,仿真、物理滚动试验相对误差为0.52%、1%。结果表明,优化标定后的土壤模型参数能够仿真该地区真实的菌草土壤模型,可为菌草移栽械关键部件的设计与优化提供重要理论依据。
关键词:含水率;菌草;土壤;触土材料;离散元;参数标定
中国分类号:S152.9""""" 文献标识码:A""""" 文章编号:2095‑5553"(2025)"02‑0279‑09
Discrete element parameter calibration of soil‑transplanting soil‑touching parts of fungus under typical moisture content
Ye Dapeng1, 2, Lin Zhiqiang1, 2, Qing Jiaxing1, 2, Gao Yuxuan1, 2, Wu Yiteng1, Xie Limin1, 2
(1.College of Mechanical and Electrical Engineering, Fujian Agriculture and Forestry University, Fuzhou, 350002, China;
2. Fujian Key Laboratory of Agricultural Information Sensing Technology, Fuzhou, 350002, China)
Abstract: In order to study the interaction law between soil and transplanting soil touching parts in hilly areas where fungi are planted and obtain the simulation parameters, the Hertz—Mindlin with JKR contact model was used to determine the discrete element parameters of specific soil‑transplanting contact parts with 12%±1% and 20%±1% moisture content. The physical test of soil accumulation angle and the physical test of earth ball slope rolling were carried out. The surface energy, recovery coefficient, dynamic friction coefficient and static friction coefficient between soil particles, soil and transplanting soil touching parts were taken as the calibration objects. The combined rotating center test was designed, and the simulated soil accumulation angle and the rolling distance of the earth ball on 65Mn were taken as the response values. Box—Behnken was used for regression analysis of the test data. With the measured soil accumulation angle and earth ball rolling distance as optimization objectives, the static friction coefficient between soil and soil contact material (65Mn) under two typical water contents as constraint conditions, the discrete element parameters between soil and soil and transplanting soil contact parts of two typical water contents were obtained as follows: When the water content was 12%±1% and 20%±1%, the surface energy, recovery coefficient, dynamic friction coefficient and static friction coefficient among soil particles were 11.042 J/m2 and 11.851 J/m2, 0.412 and 0.574, 0.093 and 0.129, 0.994 and 1.009, respectively. Surface energy, recovery coefficient and dynamic friction coefficient of soil and earth‑touching parts were 5.046 J/m2, 8.026 J/m2, 0.362, 0.388 and 0.066, 0.07. In order to verify the accuracy of the optimized discrete element parameters, verification tests were carried out and the results were as follows: the relative errors of the simulation and physical accumulation Angle of the two typical soil moisture contents were 0.96% and 0.95%, and the relative errors of the simulation and physical rolling test were 0.52% and 1%. The results show that the optimized and calibrated soil model parameters can simulate the real soil model of fungus in this area, and provide an important theoretical basis for the design and optimization of key components of fungus transplanter.
Keywords: moisture content; fungus; soil; earth‑touching materials; discrete element; parameter calibration
收稿日期:2024年1月16日""""""" 修回日期:2024年3月23日
∗ 基金项目:福建省林业科学技术攻关项目(2023FKJ01);福建省重大专项(2021NZ0101);福建农林大学交叉学科项目(XKJC—712021030)
第一作者:叶大鹏,男,1971年生,福建霞浦人,博士,教授;研究方向为农业机械自动化。E‑mail: ydp@fafu.edu.cn
通讯作者:谢立敏,女,1985年生,杭州人,博士,讲师;研究方向为农业机器人控制。E‑mail: lucy_min@163.com
0 引言
菌草可用于环境治理、修复土壤、培养食用菌类、制成动物饲料与能源燃料等,具有极大的使用与研究价值[1]。现阶段,大部分种植方式采用移栽的方式,移栽种植主要以人工配合半机械化移栽设备完成,开沟、覆土作为菌草精准播种的重要环节,研发、推广适用于对应地区的菌草农业机械,解决人工生产劳动强度大、用工多等问题成为主流趋势。同时面临着耕种时土壤回流、土壤与机具粘附严重、作业阻力大等难题。为符合实际的种植环境,针对该地区土壤间、土壤与触土部件间相互作用的规律进行研究,后续可为触土机具设计及优化提供参数[2]。
颗粒参数(分为物理参数和接触参数)作为土壤间的关键因素,其准确性决定离散元模型的精确度,物理参数可用相关仪器进行试验测得,而接触参数很难通过试验获取。尤其在丘陵山地地区,日照充足,雨水丰盈,土壤含水率变动造成土壤离散元仿真参数不详的问题。目前邢洁洁等[3]基于离散元法,选用Hertz—Mindlin"with"JKR为接触模型,以机具破土阻力的仿真和物理试验结果的一致验证了接触参数的可行性。石林榕等[4]以西北旱区的土壤为试验样品,分别配置了6种不同含水率的试样来验证接触模型的可靠性,后以机具入土阻力作为响应值,通过比较仿真试验与物理试验结果验证了参数准确性。刘宏俊等[5]利用EDEM软件中Hertz—Mindlin"with"EEPA接触模型对稻麦周年地区黏重土壤进行相关参数标定,标定所得的参数可为稻麦周年地区研制相关触土机具提供基础。向伟等[6]基于堆积角试验以休止角为目标值进行土壤标定,得到南方土壤接触参数,成穴仿真和土槽试验结果表明离散元法仿真对参数标定的准确可行性。刘坤宇等[7]以堆积角为响应值,基于响应面优化,标定土壤离散元的相关参数。结果表明,试验堆积角与最优解仿真堆积角在角度以及堆积角形态上有较高的相似性。
针对丘陵地区菌草土壤离散元模型参数不详的问题,以丘陵当地实际作业环境为依托,选取2种典型含水率土壤为研究对象,选用“Hertz—Mindlin with JKR”接触模型,利用物理试验与仿真试验相结合的方法,完成对丘陵地区实际作业情况下典型含水率下菌草土壤—移栽触土部件离散元仿真参数标定,可为后续探究土壤—触土部件耦合机理提供基础数据。
1 材料与方法
1.1 试验材料
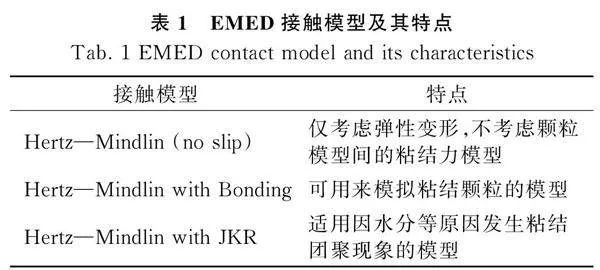
试验材料取自丘陵地区种植菌草的土壤。EDEM软件中提供多种基础模型[8‑10],如表1所示。
由于丘陵土壤地因常年多雨,土壤具有有粘结性和回弹性,Hertz—Mindlin"with JKR接触模型中的法向弹性力可较好的表征颗粒间的粘弹性特征[3]。故选用Hertz—Mindlin"with"JKR作为接触模型。
试验仪器选用土筛(粒径大小分别为3"mm、2"mm、1"mm和0.5"mm),环刀(60"cm³),电子天平(精度0.01"g),物料烘干箱,电子倾角仪(精度0.1°),烧杯,铝盒,铁架台,初粘力试验仪,漏斗,65Mn板,3D打印机(5"mm×5"mm×5"mm正方体模具和半径为3"mm球体模具)。
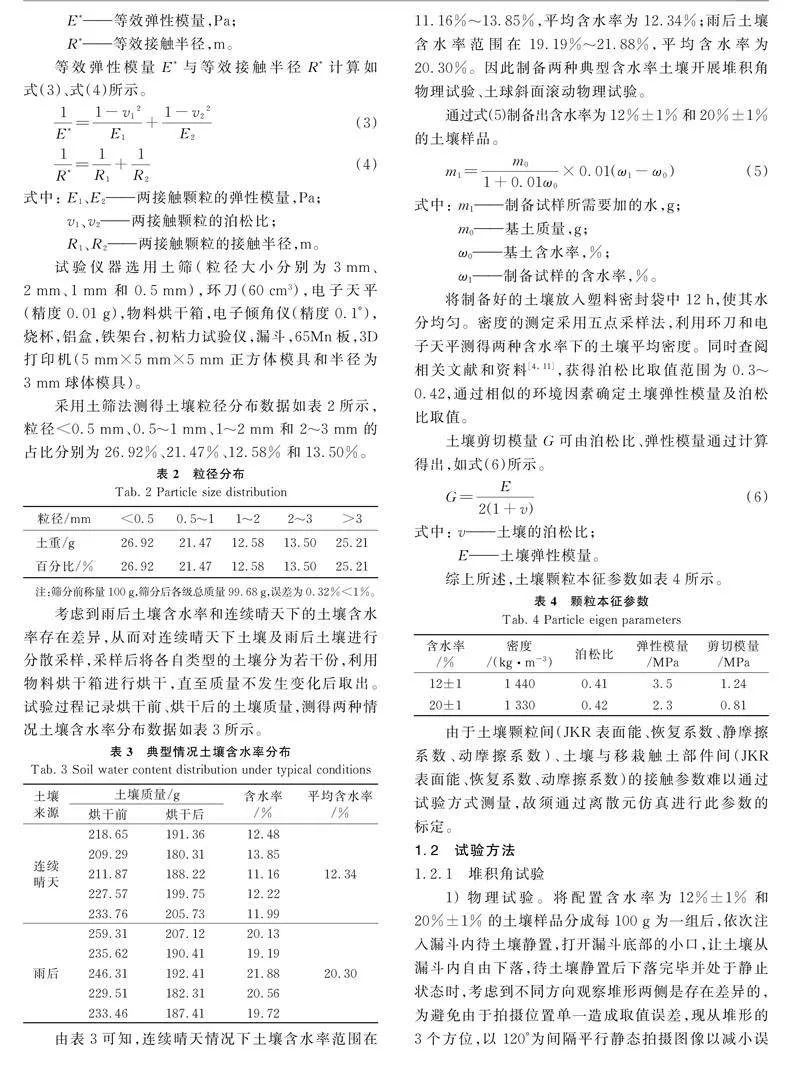
采用土筛法测得土壤粒径分布数据如表2所示,粒径lt;0.5"mm、0.5~1"mm、1~2"mm和2~3"mm的占比分别为26.92%、21.47%、12.58%和13.50%。
考虑到雨后土壤含水率和连续晴天下的土壤含水率存在差异,从而对连续晴天下土壤及雨后土壤进行分散采样,采样后将各自类型的土壤分为若干份,利用物料烘干箱进行烘干,直至质量不发生变化后取出。试验过程记录烘干前、烘干后的土壤质量,测得两种情况土壤含水率分布数据如表3所示。
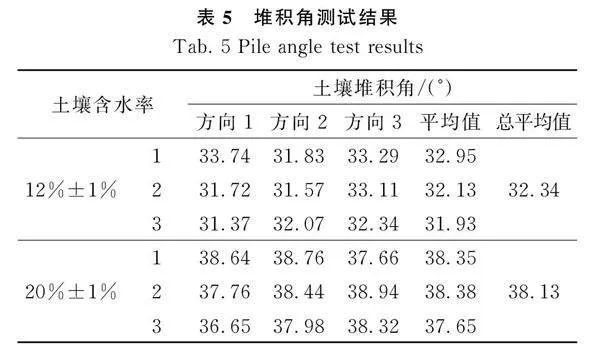
由表3可知,连续晴天情况下土壤含水率范围在11.16%~13.85%,平均含水率为12.34%;雨后土壤含水率范围在19.19%~21.88%,平均含水率为20.30%。因此制备两种典型含水率土壤开展堆积角物理试验、土球斜面滚动物理试验。
通过式(5)制备出含水率为12%±1%和20%±1%的土壤样品。
将制备好的土壤放入塑料密封袋中12 h,使其水分均匀。密度的测定采用五点采样法,利用环刀和电子天平测得两种含水率下的土壤平均密度。同时查阅相关文献和资料[4, 11],获得泊松比取值范围为0.3~0.42,通过相似的环境因素确定土壤弹性模量及泊松比取值。
土壤剪切模量G可由泊松比、弹性模量通过计算得出,如式(6)所示。
式中: [v]——土壤的泊松比;
E——土壤弹性模量。
综上所述,土壤颗粒本征参数如表4所示。
由于土壤颗粒间(JKR表面能、恢复系数、静摩擦系数、动摩擦系数)、土壤与移栽触土部件间(JKR表面能、恢复系数、动摩擦系数)的接触参数难以通过试验方式测量,故须通过离散元仿真进行此参数的标定。
1.2 试验方法
1.2.1 堆积角试验
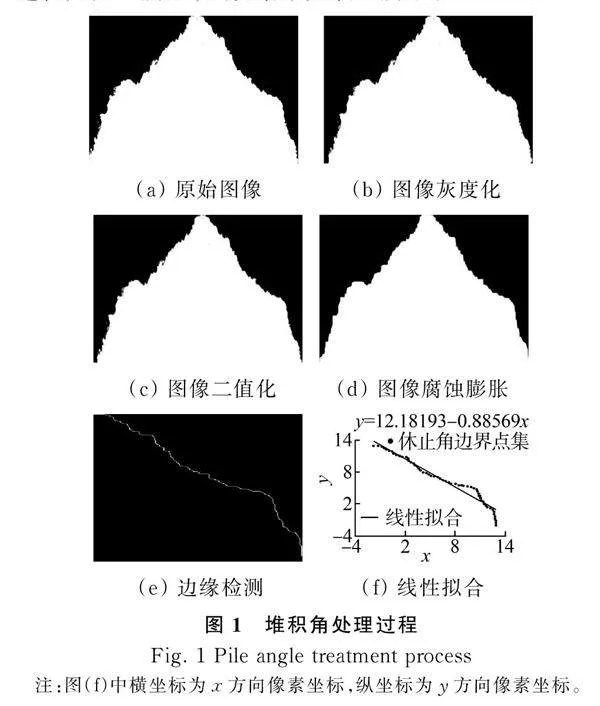
1) 物理试验。将配置含水率为12%±1%和20%±1%的土壤样品分成每100"g为一组后,依次注入漏斗内待土壤静置,打开漏斗底部的小口,让土壤从漏斗内自由下落,待土壤静置后下落完毕并处于静止状态时,考虑到不同方向观察堆形两侧是存在差异的,为避免由于拍摄位置单一造成取值误差,现从堆形的3个方位,以120°为间隔平行静态拍摄图像以减小误差。图像通过利用python图像处理软件,经二值化、阈值分割以及膨胀腐蚀等处理,然后用边界函数提取边界信息,用最小二乘法调整边界,从而最后进行线性拟合得到方程的斜率k,最终堆积角[θ=arctan|k|]。处理过程如图1所示,试验结果如表5所示。
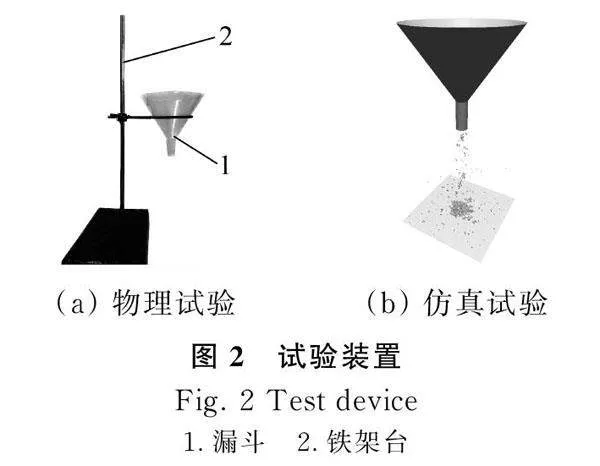
2) 仿真试验。通过EDEM"软件进行土壤堆积仿真试验,如图2所示。
1.漏斗 2.铁架台
接触模型选用Hertz—Mindlin"with"JKR,在漏斗上方设置颗粒工厂,其中粒径和质量百分比分别为:3"mm,25.21%;2"mm,26.08%;1"mm,21.47%;0.5"mm,26.92%。颗粒工厂生成总质量为100"g。待到颗粒自由下落到漏斗下方堆积稳定后,进入EDEM的后处理界面,用软件自带工具对堆积角进行测量,物理试验装置如图2(a)所示,仿真试验装置如图2(b)所示。
1.2.2 不同含水率与触土材料试验
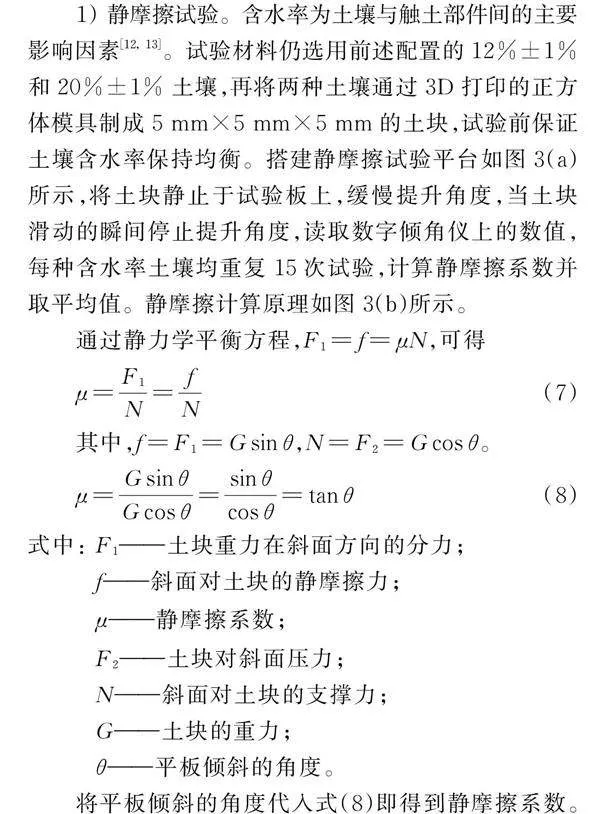
1) 静摩擦试验。含水率为土壤与触土部件间的主要影响因素[12,"13]。试验材料仍选用前述配置的12%±1%和20%±1%土壤,再将两种土壤通过3D打印的正方体模具制成5"mm×5"mm×5"mm的土块,试验前保证土壤含水率保持均衡。搭建静摩擦试验平台如图3(a)所示,将土块静止于试验板上,缓慢提升角度,当土块滑动的瞬间停止提升角度,读取数字倾角仪上的数值,每种含水率土壤均重复15次试验,计算静摩擦系数并取平均值。静摩擦计算原理如图3(b)所示。
通过静力学平衡方程,[F1=f=μN],可得
式中: [F1]——土块重力在斜面方向的分力;
[f]——斜面对土块的静摩擦力;
[μ]——静摩擦系数;
[F2]——土块对斜面压力;
[N]——斜面对土块的支撑力;
[G]——土块的重力;
θ——平板倾斜的角度。
将平板倾斜的角度代入式(8)即得到静摩擦系数。
1.初黏力试验仪"2.倾角仪 3.方形土块
2) 斜面滚动试验。依据滚动摩擦原理示意图如图4(a)所示,搭建如图4(b)所示的滚动试验台,以含水率12%±1%和20%±1%土壤作为试验对象,标定不同含水率土壤与触土部件材料的接触参数。土球在斜面顶端自然滚下(其中土球由半径[r=3 mm]的模具制成),待土球在接触板上自然停止,测量其在板上水平滚动距离[S],捏造多颗土球,每一颗土球重复5次,取平均值。同时,在EDEM软件中进行1∶1的仿真试验,斜面试验台参数及仿真材料参数如表6所示[14, 15]。
1.3 试验设计
1.3.1 土壤—土壤接触参数标定设计
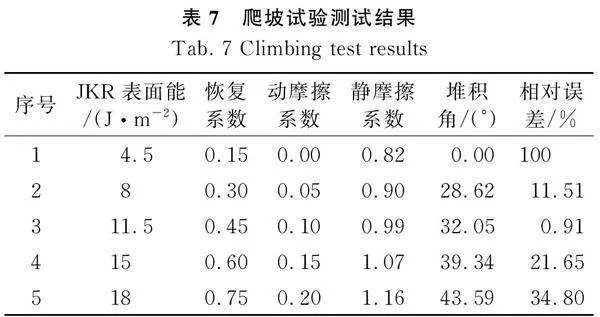
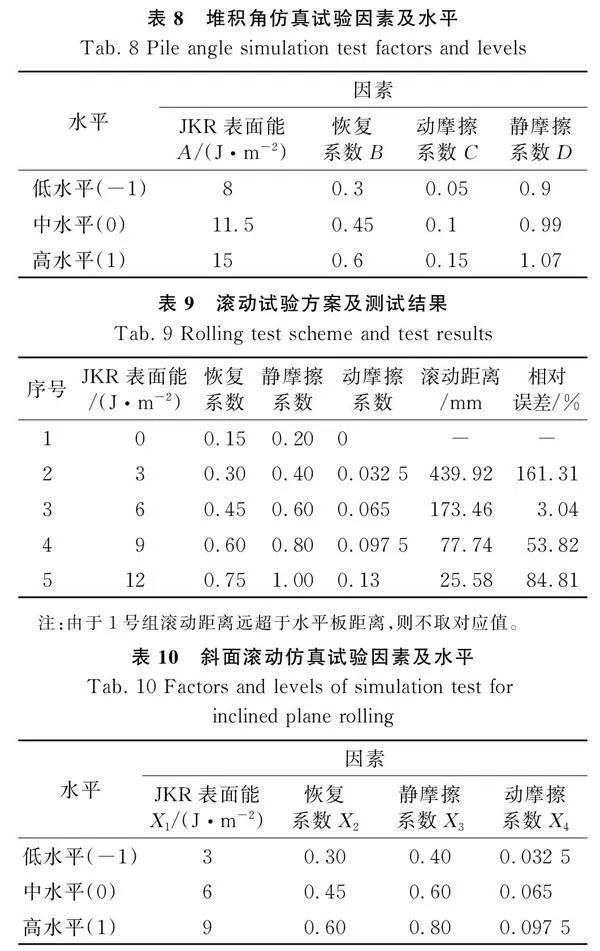
1) 爬坡试验。根据土壤的本征参数(密度、泊松比、剪切模量),结合EDEM内置GEMM数据库,以实际堆积角为目标值,得到土壤颗粒间接触参数推荐范围:JKR表面能为4.5~18"J/m2,恢复系数为0.15~0.75,滚动摩擦系数为0~0.20,静摩擦系数为0.82~1.16。根据各参数推荐范围开展爬坡试验,试验方案与结果如表7所示。由表7可知,随着土壤颗粒间的表面能,恢复系数,动、静摩擦系数逐渐增大,仿真相对误差呈现先减小而后增大的趋势,确定土壤颗粒间的表面能,恢复系数,静、动摩擦系数为11.5"J/m2、0.45、0.99、0.10为最优的参数区间的中心点,其仿真相对偏差为:0.91%。第2组与第4组试验水平分别作为低水平与高水平。
2) 二次正交旋转试验。以土壤间JKR表面能、恢复系数、滚动摩擦系数和静摩擦系数为试验因素。各因素高中低水平值设计如表8所示,通过Design—Expert中Box—Behnken进行试验设计,并完成二次回归正交旋转设计。
1.3.2 土壤—65Mn触土材料接触参数标定设计
常用的移栽末端材料为65Mn,故以土壤颗粒与65Mn间JKR表面能、恢复系数、静摩擦系数和动摩擦系数为试验因素。根据EDEM内置GEMM数据库并结合文献[12,"16],得到土壤与触土部件间接触参数范围:JKR表面能为0~12 J/m2,恢复系数为0.15~0.75,静摩擦系数为0.20~1.00,动摩擦系数为0~0.13。试验方案与结果如表9所示。由表9知,3号相对误差最小,令其为中心水平(0),2号、4号分为为低水平(-1)与高水平(1)。
通过斜面滚动预试验定义土壤与触土材料65Mn板各因素高中低水平,如表10所示。通过Design—Expert中Box—Behnken模块,进行二次回归正交旋转设计后进行试验。
2 结果与分析
2.1 堆积角仿真试验
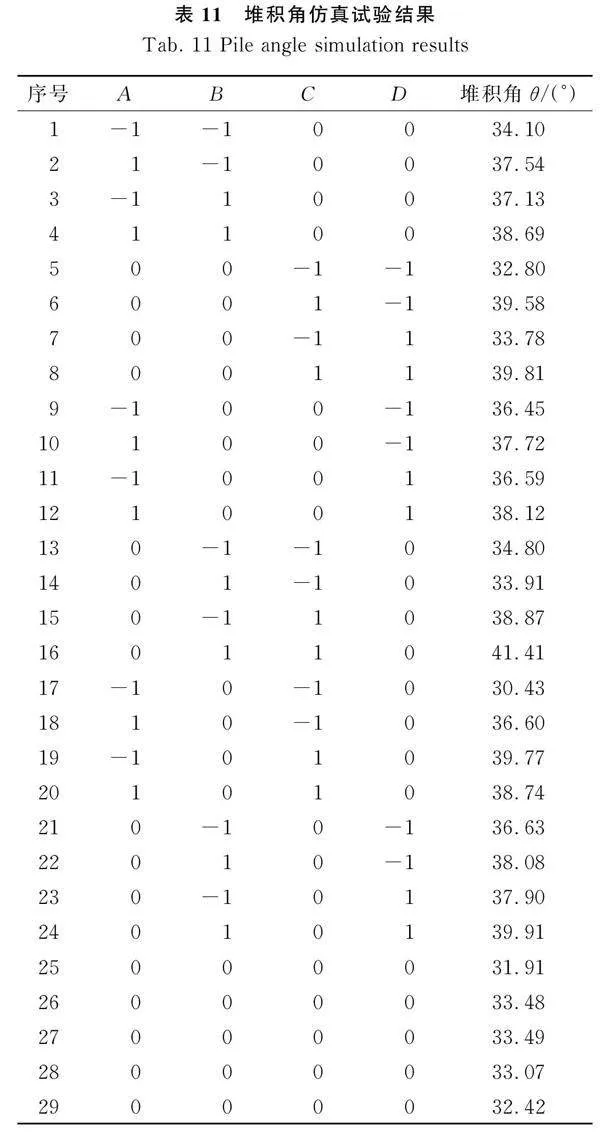
1) 仿真结果。结合水平因素正交设计进行仿真试验,以各影响因素取值为自变量,以堆积角为响应值,测试结果如表11所示。
2) 二元多项式回归模型建立及显著性分析。基于Box—Behnken对土壤堆积角仿真试验数据进行方差分析和多元回归拟合,得到堆积角二次多项式回归模型。
[θ=][32.84+1.07A+0.77B+3.00C+0.40D-0.47AB-1.80AC+0.087AD+0.86BC+0.13BD-0.20CD+1.74A2+2.63B2+1.57C2+2.46D2]
回归方程的决定系数R2=0.972 1,校正决定系数RAdj2=0.944 3。对上述模型进行方差分析,如表12所示。
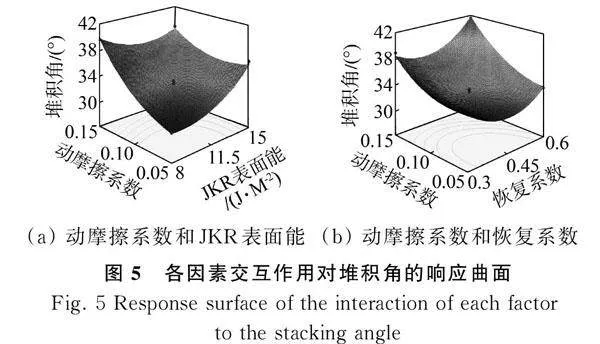
由表12可知,回归模型中的土壤堆积角模型Plt;0.01,表明整体模型为显著;失拟项P值大于0.05,表明模型拟合良好。该模型能够很好解释仿真堆积角时,堆积角角度与4个接触参数的关系。A、B、C、A与C的交互项、A2、B2、C2、D2为极显著影响,B与C对仿真堆积角为显著影响,其余项的影响力均不显著。由回归模型的F值大小,得到各个因素对土壤堆积角影响的显著性顺序分别为:Cgt;Agt;Bgt;D。
各因素交互作用对堆积角的响应曲面如图5所示。图5(a)为当B与D为中点时,A与C的交互响应面的坡度较大,表明A与C对堆积角的影响较大。该响应面的等高线呈现较大曲率的椭圆图形则表面,表明A与C交互影响显著。当A不变时,仿真堆积角随C增大而明显增大,但当A到达一定程度时,C与堆积角的关系趋于抛物线性关系,随着C增大而先减小后增大。当C不变时,仿真堆积角随A的增大而先缓慢增大后明显增大,当C达到一定值时,堆积角与A有抛物线性趋势,随着A增大呈现先减小后增大。
同理,当A与D为中点时,B与C的交互响应曲面,如图5(b)所示,该响应面的坡度较大,表明B与C对堆积角的影响较大。该响应面等高线曲率较大,表明B与C对堆积角交互影响显著。当B不变时,仿真堆积角随C增大而逐渐增加,两者关系趋于线性。当C不变时,仿真堆积角随B增大呈现先减小而后增大的趋势,两者关系呈现抛物线性关系。
2.2 摩擦系数试验
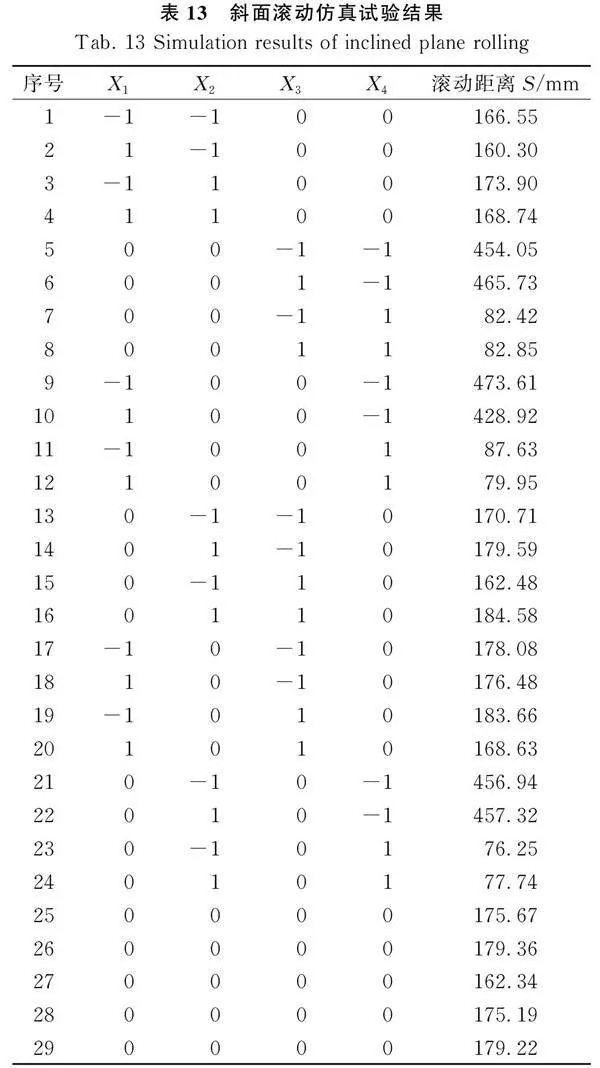
1) 滚动仿真试验结果。以土壤与触土材料间的JKR表面能、恢复系数、动摩擦系数、静摩擦系数取值为自变量,以土壤滚动距离为目标值。斜面滚动仿真试验结果如表13所示。
2) 回归模型建立及显著性分析。对表13中的试验数据进行多元回归,得到土球滚动距离的回归模型,其回归方程为
[S=174.36-6.70X1+4.05X2+0.55X3-187.48X4+0.27X1X2-3.36X1X3+9.25X1X4+3.31X2X3+0.28X2X4-2.81X3X4-2.08X1²-3.50X2²+3.27X3²+95.04X4²]
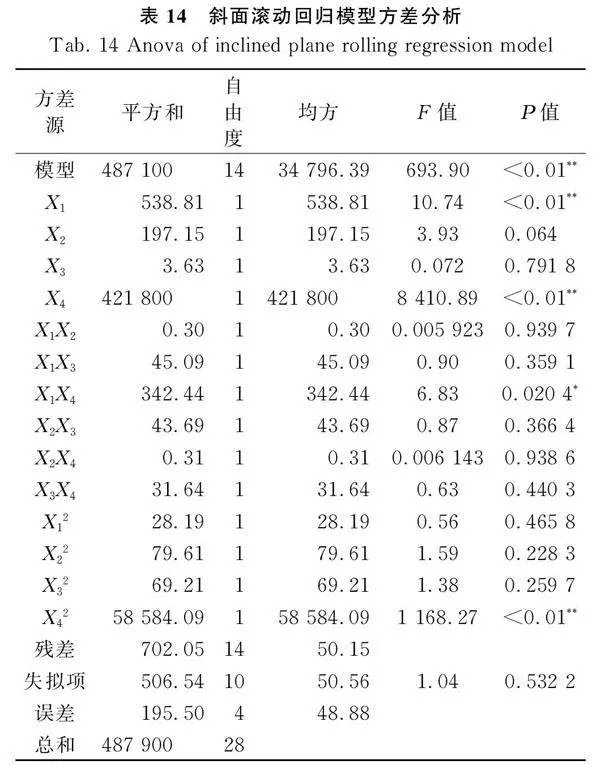
回归方程的决定系数R2=0.998 6,校正决定系数RAdj2=0.997 1。对模型进行方差分析,如表14所示。
由表14可知,斜面滚动模型Plt;0.01,表示回归模型极显著;失拟项Р值大于0.05,表明模型拟合良好。[X1]、[X4]、[X42]影响极显著;[X1]与[X4]的交互项对其滚动距离影响显著,其余项的影响力均不显著。同理,根据F值大小,可得显著性顺序分别为:[X4gt;X1gt;X2gt;X3],S主要受[X1]及[X4]影响显著。当[X1、X2、X3]一定时,S随着X4的增大而减小;当[X2、X3、X4]一定时,S随着[X1]的增大而减小。可见,[X1]、X4的增大,都明显导致S减小,原因是土壤与触土部件的黏附摩擦力增大。因此,降低表面能和动摩擦系数可有效减小黏附摩擦力大小。
3) 静摩擦试验。通过静摩擦试验,测得典型含水率下12%±1%和20%±1%的土壤与65Mn之间的静摩擦系数依次为:0.55和0.67。对于材料65Mn,土壤的含水率增加,则其静摩擦系数随之升高,可见土壤含水率超过某值以后,此含水率下与65Mn板触土面的粘附力大于其自身重力,土壤将会粘附在65Mn板上。
3 仿真分析
3.1 土壤—土壤最优参数组仿真验证
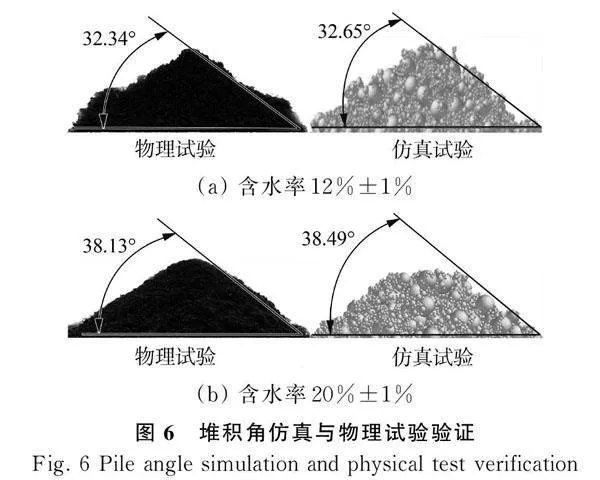
用含水率为12%±1%土壤形成的堆积角(32.34°)为目标值代入回归方程寻找优解,所得出的优化解非唯一解。选取与土壤实测数据最为接近的一组为最优解;土壤间表面能为11.042"J/m2、土壤间动摩擦系数为0.093、土壤间静摩擦因数为0.994、土壤间恢复系数为0.412。在优化解的参数下,重复5次仿真试验得到土壤堆积角为33.45°、31.46°、33.66°、32.95°、31.71°,均值为32.65°,标准偏差仅为1.01°,与实测试堆积角的相对误差(实测堆积角为标准值)仅为0.96%。同理,对含水率20%±1%土壤,以38.13°的堆积角为优化目标,土壤间JKR表面能为11.851"J/m2、土壤—土壤恢复系数为0.574、土壤—土壤动摩擦系数为0.129、土壤—土壤静摩擦因数为1.009,重复5次仿真试验得到土壤仿真堆积角为39.62°、37.99°、38.08°、39.32°、37.45°,均值38.49°,标准偏差0.93°,相对误差0.95%。由图6可知,物理与仿真试验的结果两者有极高的相似性。因此表明应用显著性分析的方法优化土壤颗粒仿真物理参数是可行的。
3.2 土壤—65Mn触土材料最优参数组仿真验证
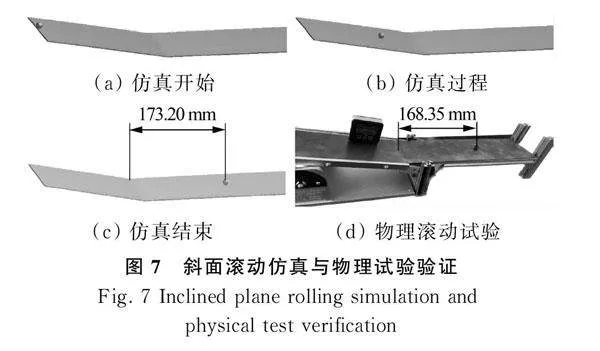
结合不同含水率土壤与65Mn的静摩擦系数,以土球实际滚动距离S为响应值,可得出最优解。当土壤含水率为12%±1%,静摩擦系数为0.55时,土壤与65Mn触土材料之间的JKR表面能、恢复系数、动摩擦系数分别为5.046"J/m²、0.362、0.066,在优化解的参数下,重复5次斜面滚动仿真,分别为166.57"mm、172.46"mm、176.59"mm、162.58"mm、167.93"mm,均值为169.22"mm,与实际滚动距离168.35"mm相对误差为0.52%。当土壤含水率为20%±1%,静摩擦系数0.67时,土壤与65Mn触土材料之间的KR表面能、恢复系数、动摩擦系数分别为8.026"J/m²、0.512、0.07,该解重复5次斜面滚动试验,分别为145.71"mm、141.74"mm、140.72"mm、141.82"mm、147.86"mm,均值为143.57"mm,与该含水率下的实际滚动距离142.14"mm相对误差为1%。用优化解的参数开展滚动距离仿真试验,如图7所示,可知物理试验与仿真试验的结果十分接近,验证该优化解准确可行。
4 结论
1) 通过对典型含水率土壤标定:含水率12%±1%的土壤颗粒之间JKR表面能为11.042"J/m2,恢复系数为0.412,滚动摩擦系数为0.093,静摩擦系数0.994;含水率20%±1%的土壤颗粒之间JKR表面能为11.851"J/m2,恢复系数为0.574,滚动摩擦系数为0.129,静摩擦系数系数为1.009,与物理试验相对误差为0.96%和0.95%。
2) 含水率12%±1%和20%±1%的土壤与65Mn板之间的静摩擦系数分别为0.55和0.67。得到土壤的含水率与其静摩擦系数有关,随着含水率增加其静摩擦系数随之升高。
3) 当土壤含水率为12%±1%和20%±1%,且静摩擦系数分别为0.55和0.67时,土壤与65Mn板之间的JKR表面能分别为5.046"J/m2和8.026 J/m2,恢复系数为0.362和0.512,动摩擦系数为0.066和0.07,用优化后的离散元仿真参数进行斜面滚动仿真,仿真结果与物理试验相对误差仅为0.52%和1%。
参 考 文 献
[ 1 ]""""" 高方超. 新型牧草巨菌草“绿洲一号”快繁技术研究[D]. 新乡: 河南科技学院, 2020.
[ 2 ]""""" 陶利民, 石艳琪, 黄柳益, 等. 广西滨海地区甘蔗耕种土壤离散元仿真模型的参数标定[J]. 江西农业学报, 2022, 34(10): 94-100.
[ 3 ]""""" 邢洁洁, 张锐, 吴鹏, 等. 海南热区砖红壤颗粒离散元仿真模型参数标定[J]. 农业工程学报, 2020, 36(5): 158-166.
Xing Jiejie, Zhang Rui, Wu Peng, et al. Parameter calibration of discrete element simulation model for latosol particles in hot areas of Hainan Province [J]. Transactions of the Chinese Society of Agricultural Engineering, 2020, 36(5): 158-166.
[ 4 ]""""" 石林榕, 赵武云, 孙伟. 基于离散元的西北旱区农田土壤颗粒接触模型和参数标定[J]. 农业工程学报, 2017, 33(21): 181-187.
Shi Linrong, Zhao Wuyun, Sun Wei. Parameter calibration of soil particles contact model of farmland soil in northwest arid region based on discrete element method [J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(21): 181-187.
[ 5 ]""""" 刘宏俊, 张文毅, 纪要, 等. 基于离散元法的稻麦周年地区土壤仿真物理参数标定[J]. 中国农机化学报, 2020, 41(12): 153-159.
Liu Hongjun, Zhang Wenyi, Ji Yao, et al. Parameter calibration of soil particles in annual rice wheat region based on discrete element method [J]. Journal of Chinese Agricultural Mechanization, 2020, 41(12): 153-159.
[ 6 ]""""" 向伟, 吴明亮, 吕江南, 等. 基于堆积试验的黏壤土仿真物理参数标定[J]. 农业工程学报, 2019, 35(12): 116-123.
Xiang Wei, Wu Mingliang, Lü Jiangnan, et al." Calibration of simulation physical parameters of clay loam based on soil accumulation test [J]. Transactions of the Chinese Society of Agricultural Engineering, 2019, 35(12): 116-123.
[ 7 ]""""" 刘坤宇, 苏宏杰, 李飞宇, 等. 基于响应曲面法的土壤离散元模型的参数标定研究[J]. 中国农机化学报, 2021, 42(9): 143-149.
Liu Kunyu, Su Hongjie, Li Feiyu, et al. Research on parameter calibration of soil discrete element model based on response surface method [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(9): 143-149.
[ 8 ]""""" 宋少龙, 汤智辉, 郑炫, 等. 新疆棉田耕后土壤模型离散元参数标定[J]. 农业工程学报, 2021, 37(20): 63-70.
Song Shaolong, Tang Zhihui, Zheng Xuan, et al. Calibration of the discrete element parameters for the soil model of cotton field after plowing in Xinjiang of China [J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(20): 63-70.
[ 9 ]""""" 王国强, 郝万军, 王继新. 离散单元法及其在EDEM上的实践[M]. 西安: 西北工业大学出版社, 2010.
[10]""nbsp;"" 胡国明. 颗粒系统的离散元素法分析仿真: 离散元素法的工业应用与EDEM软件简介[M]. 武汉: 武汉理工大学出版社, 2010.
[11]""""" 李艳洁, 吴腾, 林剑辉, 等. 基于离散元法的贯入圆锥对沙土颗粒运动特性分析[J]. 农业工程学报, 2012, 28(24): 55-61.
[12]""""" 李俊伟, 佟金, 胡斌, 等. 不同含水率黏重黑土与触土部件互作的离散元仿真参数标定[J]. 农业工程学报, 2019, 35(6): 130-140.
Li Junwei, Tong Jin, Hu Bin, et al. Calibration of parameters of interaction between clayey black soil with different moisture content and soil‑engaging component in northeast China [J]. Transactions of the Chinese Society of Agricultural Engineering, 2019, 35(6): 130-140.
[13]""""" 任露泉. 土壤粘附力学[M]. 北京: 机械工业出版社, 2011.
[14]""""" Ucgul M, Saunders C, Fielke J M. Discrete element modelling of tillage forces and soil movement of a one‑third scale mouldboard plough [J]. Biosystems Engineering, 2017, 155: 44-54.
[15]""""" Sun J Y, Wang Y M, Ma Y H, et al. DEM simulation of bionic subsoilers (tillage depth gt; 40 cm) with drag reduction and lower soil disturbance characteristics [J]. Advances in Engineering Software, 2018, 119: 30—37.
[16]""""" 郝新敏, 杨元, 黄斌香. 聚四氟乙烯微孔膜及纤维[M]. 北京: 化学工业出版社, 2011.
