车载网络开发流程简述
2025-02-03毛鸿霖岑仲善韩光省郑继翔魏文杰李保生






【摘" 要】随着汽车产业发展,车载网络应用不断扩大。文章从概念设计、系统设计、测试验证三方面介绍车载网络开发流程,包括车载以太网、CAN/CANFD、LIN等。其中,概念设计阶段进行需求分析并制定总线通信规范;系统设计阶段考虑拓扑设计要点,进行通信矩阵、诊断协议设计及数据库和整车仿真模型建立;测试验证阶段编制测试规范、开发测试环境、设计自动化测试用例并实施测试。最后总结车载网络发展趋势及本文对相关从业人员和汽车产业的意义。
【关键词】车载网络;车载以太网;CAN/CANFD;LIN
中图分类号:U463.6"""" 文献标识码:A""" 文章编号:1003-8639(2025)01-0046-05
Introduction to the Development Process of Vehicle Network*
MAO Honglin1,CEN Zhongshan2,HAN Guangsheng1,ZHENG Jixiang1,WEI Wenjie1,LI Baosheng1
(1.CATARC(Tianjin)Automotive Engineering Research Institute Co.,Ltd.,Tianjin 300300;
2.Guangxi Eco-engineering Vocational and Technical College,Liuzhou 545004,China)
【Abstract】With the development of automobile industry,the application of vehicle-mounted network continues to expand. This paper introduces the development process of vehicle network from three aspects: concept design,system design,test and verification,including vehicle Ethernet,CAN/CANFD,LIN,etc. In the conceptual design phase,requirements are analyzed and bus communication specifications are formulated. In the stage of system design,the key points of topology design are considered,and the communication matrix,diagnostic protocol design and database and vehicle simulation model are established. In the test verification phase,test specification is prepared,test environment is developed,automated test cases are designed and tested. Finally,it summarizes the development trend of vehicle network and the significance of this paper to relevant practitioners and the automotive industry.
【Key words】vehicle network;on-board Ethernet;CAN/CANFD;LIN
1" 车载网络拓扑发展趋势
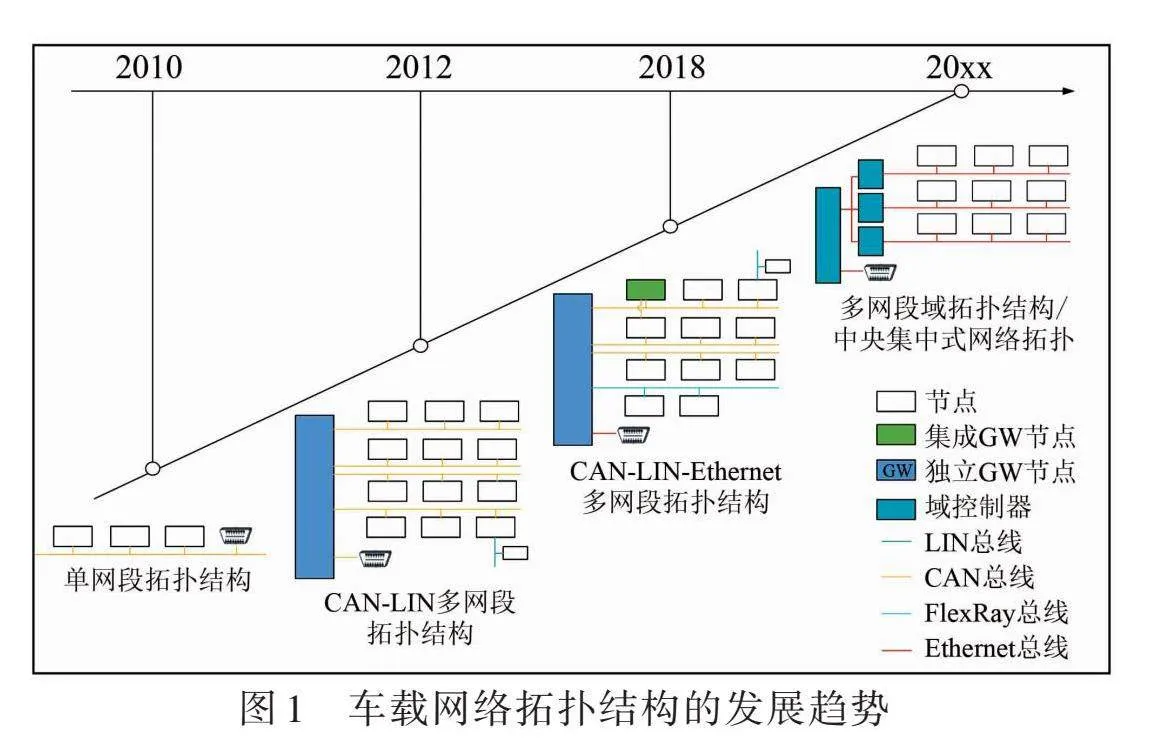
随着车辆电动化、智能化、网联化程度的不断加深,空中下载技术OTA、车联网通信技术V2X、高级辅助驾驶ADAS等高带宽应用的需求不断加大。由于智能网联汽车不断增加的电子电气功能[1],使得电子控制单元(ECU)的数量急剧增加,并且负载率接近边界值等因素,进而导致车载网络拓扑结构呈现多元化发展态势。图1展示了车载网络拓扑结构的发展历程和未来趋势,通过分析可知,车载网络拓扑结构遵循着从单网段到CAN-LIN多网段,再到CAN-LIN-Ethernet多网段以及多网段域集中式的发展路径,最终将会演进成为中央集中式网络拓扑。
2" 车载网络开发流程
车载网络开发流程分为概念设计、系统设计、测试验证3个阶段,如图2所示。
1)概念设计:依据车型的开发计划、车型配置表、功能需求清单、对标车和平台车型分析以及供应商调查表等,对目标车型进行需求分析,以明确网络开发需求,进而编制与网络总线开发相关的需求规范[2]。
2)系统设计:在综合考虑成本以及可扩展性的基础上,开展网络拓扑结构设计、通信矩阵开发、诊断协议开发,并建立网络仿真模型。
3)测试验证:在设计规范制定完成后,立即进行测试规范的制定,最后对单节点、系统台架以及整车进行网络和诊断测试验证。
3" 概念设计阶段
概念设计又称为网络架构设计,主要根据目标车型需求分析和平台需求来制定规范,从上层确定车载网络的开发方向。
3.1" 概念阶段需要进行多维度分析
1)配置需求分析:根据整车配置规划清单和功能清单,对整车电气零部件采用总线通信的节点数量进行初步预估。
2)整车功能需求分析:根据整车具体的功能需求,对网络管理、诊断、刷写、OTA升级等方面的需求进行评估。
3)对标车型分析:分析对标车型的网络拓扑、网络管理方式、重点关注新功能的通信方式、整体拓扑结构、新型总线的应用。
4)平台车型分析:由于车型并非独立于平台存在,可参考现有平台车型的网络拓扑和总线矩阵,充分考虑其继承性与扩展性。
5)供应商调查表分析:发放供应商网络和诊断开发能力调查表,对现有及潜在供应商的当前方案、开发能力、技术路线进行调查,有助于确定网络方案。
3.2" 总线通信规范设计
若企业在此之前没有车载网络总线规范,那么就需要建立企业级规范。对于CAN/LIN,相关规范包括物理层规范、高速CAN通信规范、ID分配规范、网络管理需求规范、网关需求规范、诊断平台需求规范、Bootloader刷新需求规范、LIN通信需求规范等。而对于Ethernet(以太网),相关规范有物理层需求规范、线束与连接器规范、IP层需求规范、SOME/IP需求规范、UDS on IP规范、Ethernet-CAN/CANFD网关路由需求规范、车载以太网配置规范、车载以太网UDP网络管理规范等。
若企业已经拥有车载网络总线平台规范,那么就需要在对目标车型进行分析之后,考虑当前的总线规范是否满足开发需求,例如网络管理策略、网关路由策略等内容是否需要因车型而进行局部调整。如果需要调整,那么可以在平台规范的基础上进行适当修改,使其成为适用于目标车型的规范。
4" 系统设计阶段
4.1" 拓扑设计考虑
车载网络总线拓扑能直接反映整车各ECU通信系统之间的关系,其设计考虑点如下。
1)总线结构类型选择:总线形、星形、环形、菊花链路形等总线结构。
2)网络总线类型选择:CAN、CANFD、LIN、车载以太网。
3)网关类型选择:采用集成式网关(集成在域控制器)或独立网关。
4)波特率(速率)选择:车载以太网速率选择1000Base、100Base、10Base,CAN/CANFD波特率选择2Mb/s、500kb/s、250kb/s、125kb/s。
5)网络管理类型选项:采用AUTOSAR还是OESK网络管理,支持不同网络管理协议的节点不允许放在同一网段。
6)终端电阻布置位置:电阻集成在各网段最远端的ECU中。
7)私有网段和跨接网段使用:当某些网段上的控制器过多时,可建立私有网络以减少对公共网络的影响[3];对于需要和多个域进行交互的控制器,由于交互数量多且报文周期短,建议该ECU通过跨接网段来减少总线负载率。
8)考虑ECU刷写:是否支持Bootloader刷写、并行刷写,且兼容本地刷写与远程刷写。
9)考虑标定、诊断和刷写:推荐采用统一路径,同时允许特殊节点采用单独的标定、诊断或刷写网段。
10)考虑节点布置位置:基于ECU功能需求,将功能相关且功能交互频繁的节点尽量布置在同一网段(如动力、底盘、信息娱乐、车身、智能驾驶等网段),以减少信号路由。
11)总线带宽与负载率:根据带宽需求及成本情况,选择合适的协议传输,确保网络负载率对消息延时的影响不超过±10%。
12)考虑整车的网络安全:防火墙、独立诊断网段的设计能有效防止数据泄露。
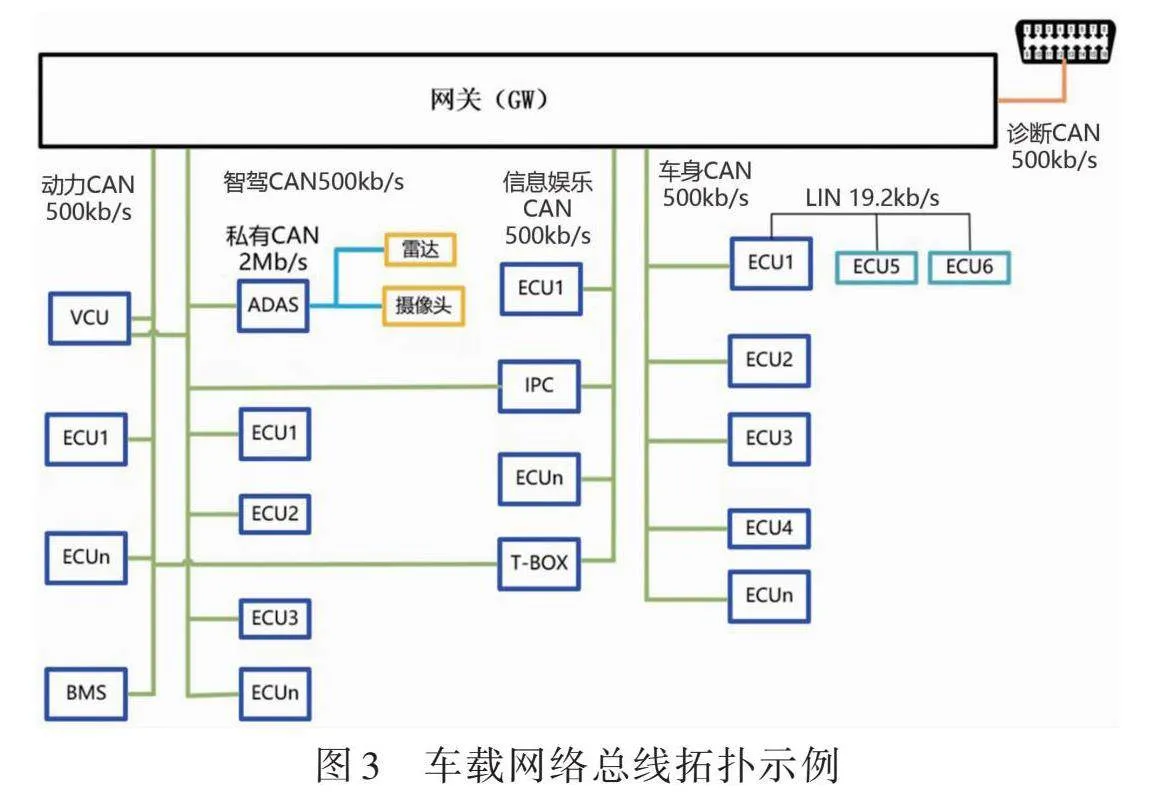
车载网络总线拓扑示例如图3所示。因功能控制器较多,采用独立网关按照功能建立动力、智能驾驶、信息娱乐、车身、诊断网段;多个控制器(VCU、T-BOX、IPC)采用双路总线跨接,分别发送和接收信号,降低总线负载率;控制器自身的传感器或执行器功能通信采用多路LIN总线实现;ADAS辅助驾驶系统使用私有CAN进行多传感器的信息融合,减少对公共CAN的影响。
4.2" 通信矩阵设计
4.2.1" CAN/LIN通信矩阵设计
与产品工程师或供应商展开交流,明确各电子控制单元(ECU)的信号发送(TX)和接收(RX)需求,从而完成信号接口控制文档(ICD)收发列表。该列表包含信号名称、信号长度、信号精度、信号范围、信号发送类型以及收发关系等信息。网络工程师把信号封装成报文,制定报文名称、报文标识(ID)和报文发送类型,依此编制整车通信矩阵。对于跨网段传输的报文,需要制定网关报文路由列表。通信矩阵示例如图4所示。
4.2.2" 车载以太网SOME/IP通信矩阵设计
架构工程师依据功能架构开发的相关输入文档,完成用例(Use Case)列表的开发工作。用例列表是服务导向可扩展中间件(SOME/IP)通信矩阵开发的重要输入,其包含的属性有:系统名称、功能名称、使用场景、使用场景描述、前置条件、触发条件、动态序列交互、传输数据、传输数据类型、最大数据长度、发送频率要求、传输介质。
网络工程师将用例列表作为SOME/IP通信矩阵定义的输入文档,把用例列表中的传输数据逐一映射到SOME/IP通信矩阵当中,其中包括:服务名称、服务ID、服务描述、远程过程调用(RPC)类型、方法/事件ID、传输层协议、发送策略、发送周期等信息。车载以太网SOME/IP通信矩阵示例如图5所示。
4.3" 诊断协议设计
根据控制器功能需求设计ECU支持的诊断服务、诊断参数和安全算法开发、EOL下线流程开发,完成ECU诊断开发。图6为ECU支持的诊断服务列表示例。
1)支持的UDS诊断服务列表,如0x10诊断模式控制、0x11电控单元复位、0x27安全访问、0x28通信控制、0x22读取数据、0x2E写入数据、0x19读取诊断信息等。
2)DTC列表显示ECU支持的所有诊断故障码清单。
3)读写DID列表显示通过0x22、0x2A或0x2E服务执行节点标识的读取或写入操作。
4)根据ECU特性开发Bootloader刷写流程。
5)根据安全访问算法配置规范以及节点的算法掩码输入,为每个控制器开发不同安全等级的安全算法dll文件,dll文件的输出函数均有清晰的函数名、参数列表、返回类型等,兼容符合标准的诊断设备及测试设备。
6)开发EOL下线流程问卷,包含所需诊断服务、DID、EOL流程描述、EOL流程图等技术要素;ECU零部件供应商填写具体的技术要素参数后,进行逻辑审核,并组织问题讨论和定版。
4.4" 数据库和整车仿真模型建立
使用CANoe.db++进行CAN网络数据库DBC文件的设计;使用LDF Explorer进行LIN数据库LDF文件的设计;使用PREEvision软件进行车载以太网的数据库ARXML文件的设计;利用CANdelaStudio软件建立各ECU诊断数据库CDD文件,CDD文件主要用于支持UDS诊断协议的ECU在开发阶段进行测试验证,也可使用转换软件生成ODX文件应用于产线和售后诊断阶段。
使用CANoe建立整车网络仿真模型(图7),根据网络设计规范建立仿真模型、设计人机交互界面、开发仿真程序得出总线负载率及延迟率分析报告。
5" 测试验证阶段
5.1" 测试规范开发-编制测试规范
编制符合需求规范的测试规范,定义测试目的、测试步骤、测试评价结果。
CAN/LIN总线测试规范有:CAN通信测试规范、LIN通信测试规范、OSEK网络管理测试规范、AUTOSAR网络管理测试规范、网关测试规范、诊断协议测试规范、Bootloader测试规范、系统集成测试规范、整车测试规范。
车载以太网测试规范有:节点物理层测试规范、协议一致性测试规范、交换机测试规范、UDS测试规范、Bootloader测试规范、DoIP协议测试规范、SOME/IP测试规范、网关路由测试规范、gPTP测试规范、系统和实车测试规范。
5.2" 测试环境开发
测试前期需要基于ECU线束ICD以及零部件供应商提供的接插件制作用于单节点网络测试的专用线束。可根据车型的需求开发适用于系统测试的柜式台架(图8),或使用真实线束在车型台架搭建系统台架环境。
5.3" 自动化测试用例设计及测试实施
开发自动化测试用例以实现电子控制单元(ECU)高效的网络测试。对于CAN总线测试用例设计涵盖物理层、数据链路层、网络管理、应用层、网关测试等方面;LIN总线测试用例设计包括物理层、数据链路层、网络管理以及鲁棒性等内容;车载以太网测试用例设计包含物理层PMA和IOP、TC8 3.0协议一致性、诊断互联协议(DoIP)协议、网关路由、网络管理、应用层等。
车载网络通过ECU单节点测试、系统集成测试、整车测试来验证ECU符合设计规范,从而保障车辆各ECU间通信的稳定性。
6" 结束语
随着车联网技术的快速发展,整车的智能座舱、人机交互、智能驾驶等功能顺势而生,并逐渐成为汽车发展的主流方向[4]。车载网络在汽车中的应用将会更加广泛,网络总线类型也会更加多样化。本文从车载网络的概念设计、系统设计、测试验证三方面对车载网络开发流程进行了简要介绍,为相关从业人员提供了一定的技术参考[5],同时也为汽车产业的发展提供了技术支持。
参考文献
[1] 李林泽,石如泉,徐嫚,等.以太环网架构的发展趋势及其在智能网联汽车中的应用[J].时代汽车,2021(12):23-24.
[2] 王欢,杜全辉,尹华军,等.纯电动轿车CAN总线系统开发[J].汽车工程学报,2011,1(2):147-152.
[3] 李广大,宋菊,宋明昊.车载通信总线带宽资源的控制方法[J].汽车电器,2024(7):32-36,39.
[4] 姬楠,谷原野,王邵龙,等.车载以太网物理层互操作性测试研究[J].汽车电器,2024(5):78-80.
[5] 杨子.车载以太网关键技术的研究[J].自动化应用,2024,65(12):256-258.
(编辑" 凌" 波)
