基于遗传模糊控制的燃料电池混合动力汽车燃油经济性提高方法
2025-02-03王毅秦小朋胡垚何恒江周娅




【摘" 要】为提高燃料电池汽车燃油经济性,并解决常规模糊控制中存在的参数优化与调节相对困难、构建模糊规则与隶属度函数主观性高和鲁棒性差等问题,提出一种基于遗传模糊控制的燃料电池汽车油耗降低方法。首先,对燃料电池汽车电机功率、电池电量与超级电容容量等部件进行物理建模;然后,在此基础上提出一种提高汽车燃油经济性、克服模糊控制下常规问题的方法;最后,与传统模糊控制算法进行对比,通过MATLAB/Simulink进行仿真试验测试算法的性能。试验结果表明,相对于对比算法,遗传模糊控制算法有较高的燃油经济性、动力电池荷电状态维持能力与燃料电池效率,能够克服模糊控制中存在的参数优化与调节困难、隶属度函数建立主观性高与鲁棒性差等问题。
【关键词】燃料电池汽车;遗传模糊控制;燃油经济性
中图分类号:U469.72"""" 文献标识码:A""" 文章编号:1003-8639(2025)01-0023-05
A Method for Improving Fuel Economy of Fuel Cell Hybrid Electric Vehicles Based
on Genetic Fuzzy Control*
WANG Yi,QIN Xiaopeng,HU Yao,HE Hengjiang,ZHOU Ya
(Sichuan Vocational College of Science and Technology,Meishan 611730,China)
【Abstract】In order to improve the fuel economy of fuel cell vehicles and solve the problems of relatively difficult parameter optimization and adjustment,high subjectivity and poor robustness in constructing fuzzy rules and membership functions in conventional fuzzy control,a fuel cell vehicle fuel consumption reduction method based on genetic fuzzy control is proposed. Firstly,physical modeling of components such as motor power,battery capacity,and supercapacitor capacity of fuel cell vehicles;Then,based on this,a method is proposed to improve the fuel economy of automobiles and overcome conventional problems under fuzzy control;Finally,compared with traditional fuzzy control algorithms,simulation experiments were conducted using Matlab/Simulink to test the performance of the algorithm. The experimental results showed that compared to the comparison algorithm,the genetic fuzzy control algorithm has higher fuel economy,power battery state of charge maintenance ability,and fuel cell efficiency,overcoming the problems of parameter optimization and adjustment difficulties,high subjectivity and poor robustness in establishing membership functions in fuzzy control.
【Key words】fuel cell vehicle;genetic fuzzy control;fuel economy
0" 引言
由于国家与地区对于能源安全的担忧,尤其是对于依赖进口石油的国家,促使了对多元化交通燃料的需求。燃料电池混合动力汽车提供了一种潜在的解决方案,吸引了研究者的广泛关注。
混合动力汽车结合了内燃机与电动机,其可以通过电动机辅助内燃机的方式,提高燃油效率并节省燃油费用。但是,混合动力系统的性能很大程度上取决于如何通过不同类型的能源分配所需的功率。文献[1]针对某款燃料电池汽车,建立高精度椭球基函数神经网络近似模型,使优化后的燃料电池系统动力输出更加平稳;文献[2]针对燃料电池汽车能量管理策略在复杂工况下适应性差的问题,提出一种反向传播的神经网络模糊能量管理策略,仿真结果表明所提出的方法可以有效识别随机工况,进一步改善了整车经济性;文献[3]利用自适应模糊滤波对需求功率进行解耦分层,并采用基于等效消耗最小的思想构建奖励函数,与传统SAC算法相比,汽车燃油经济性有所提高。
鉴于少有文献对混合动力汽车燃油经济性与常规模糊控制问题进行统一研究,且存在控制器响应速度与稳定性矛盾无法解决,算法在极限工况下适应性尚缺乏足够验证等问题,故本文借鉴以上优化策略,提出基于遗传模糊控制的燃料电池混合动力汽车油耗降低算法。
1" 燃料电池混合动力汽车配置与计算
燃料电池混合动力汽车(FCHEV)的动力结构较为复杂,其主要包括车辆控制器、电池能量管理系统、电动机、传动系统等多个关键组件。FCHEV配置如图1所示。
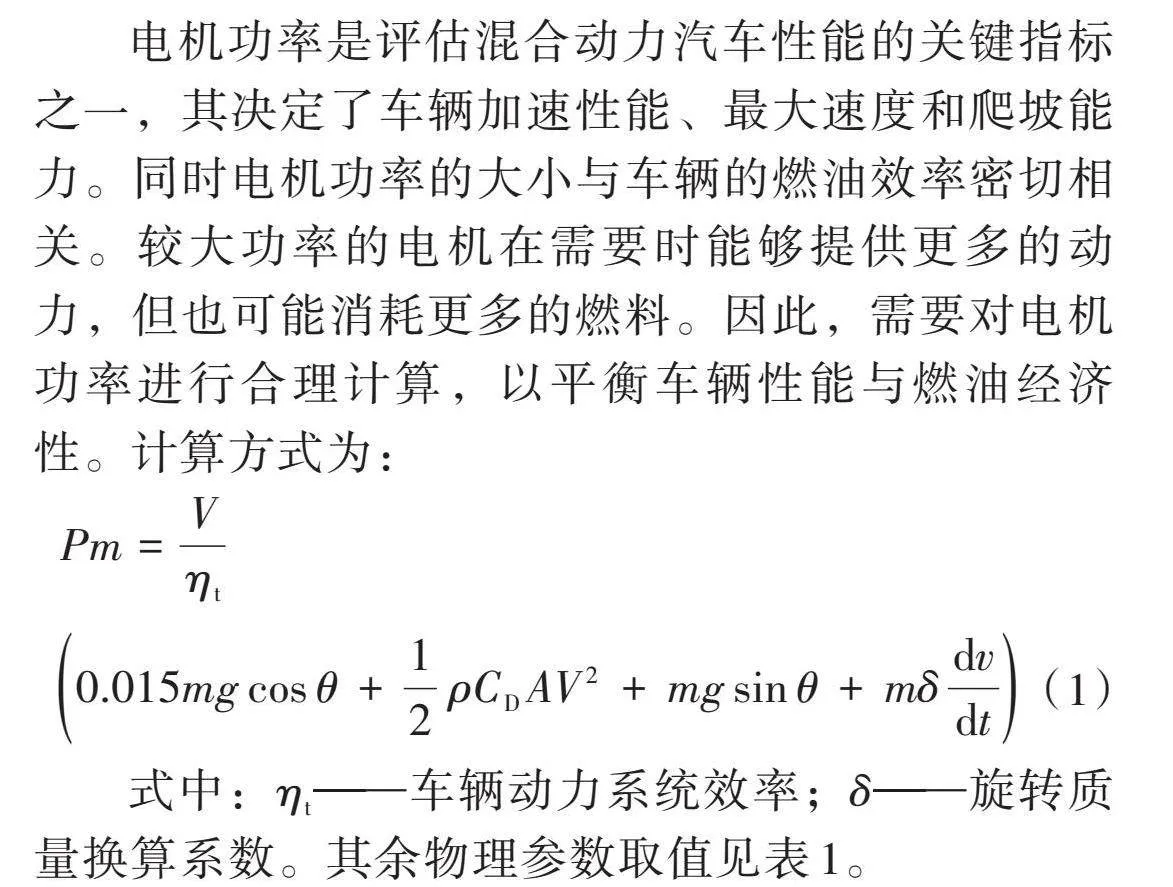
电机功率是评估混合动力汽车性能的关键指标之一,其决定了车辆加速性能、最大速度和爬坡能力。同时电机功率的大小与车辆的燃油效率密切相关。较大功率的电机在需要时能够提供更多的动力,但也可能消耗更多的燃料。因此,需要对电机功率进行合理计算,以平衡车辆性能与燃油经济性。计算方式为:
[0.015mgcosθ+12ρCDAV2+mgsinθ+mδdvdt](1)
式中:ηt——车辆动力系统效率;δ——旋转质量换算系数。其余物理参数取值见表1。
电池功率可由电机功率与燃料电池系统功率求得:
[PPS=Pmηm−Pfc] (2)
式中:PPS——电池功率;Pm——电机最大功率;Pfc——燃料电池系统功率。
可求得电池单元数量为:
[nbat=PPSmmodulePSηt] (3)
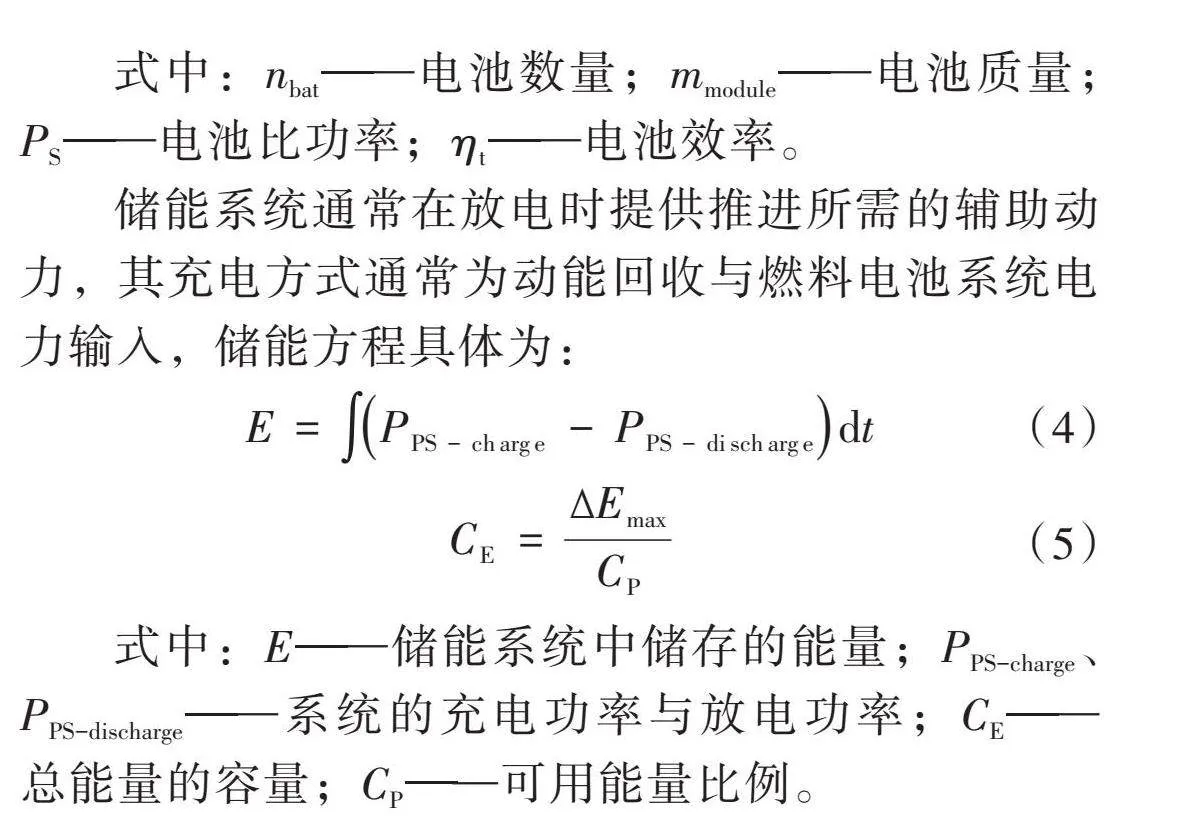
式中:nbat——电池数量;mmodule——电池质量;PS——电池比功率;ηt——电池效率。
储能系统通常在放电时提供推进所需的辅助动力,其充电方式通常为动能回收与燃料电池系统电力输入,储能方程具体为:
[E=PPS−charge−PPS−dischargedt] (4)
[CE=∆EmaxCP] (5)
式中:E——储能系统中储存的能量;PPS-charge、PPS-discharge——系统的充电功率与放电功率;CE——总能量的容量;CP——可用能量比例。
2" 遗传模糊控制算法
2.1" 算法介绍
模糊控制算法(Fuzzy Control)是一种基于模糊逻辑理论的控制方法,旨在处理难以精确建模与分析的系统。这种控制方法广泛应用于需要处理非线性、不确定性与模糊性的系统中。
模糊控制算法的优点在于它可以应对复杂、非线性和不确定的系统,而无需建立严格的数学模型。这种控制方法在许多实际应用中都非常成功。然而,模糊控制现存的问题主要有参数优化与调节相对困难、构建隶属度函数主观性高与鲁棒性差等。
2.2" 模糊控制算法设计
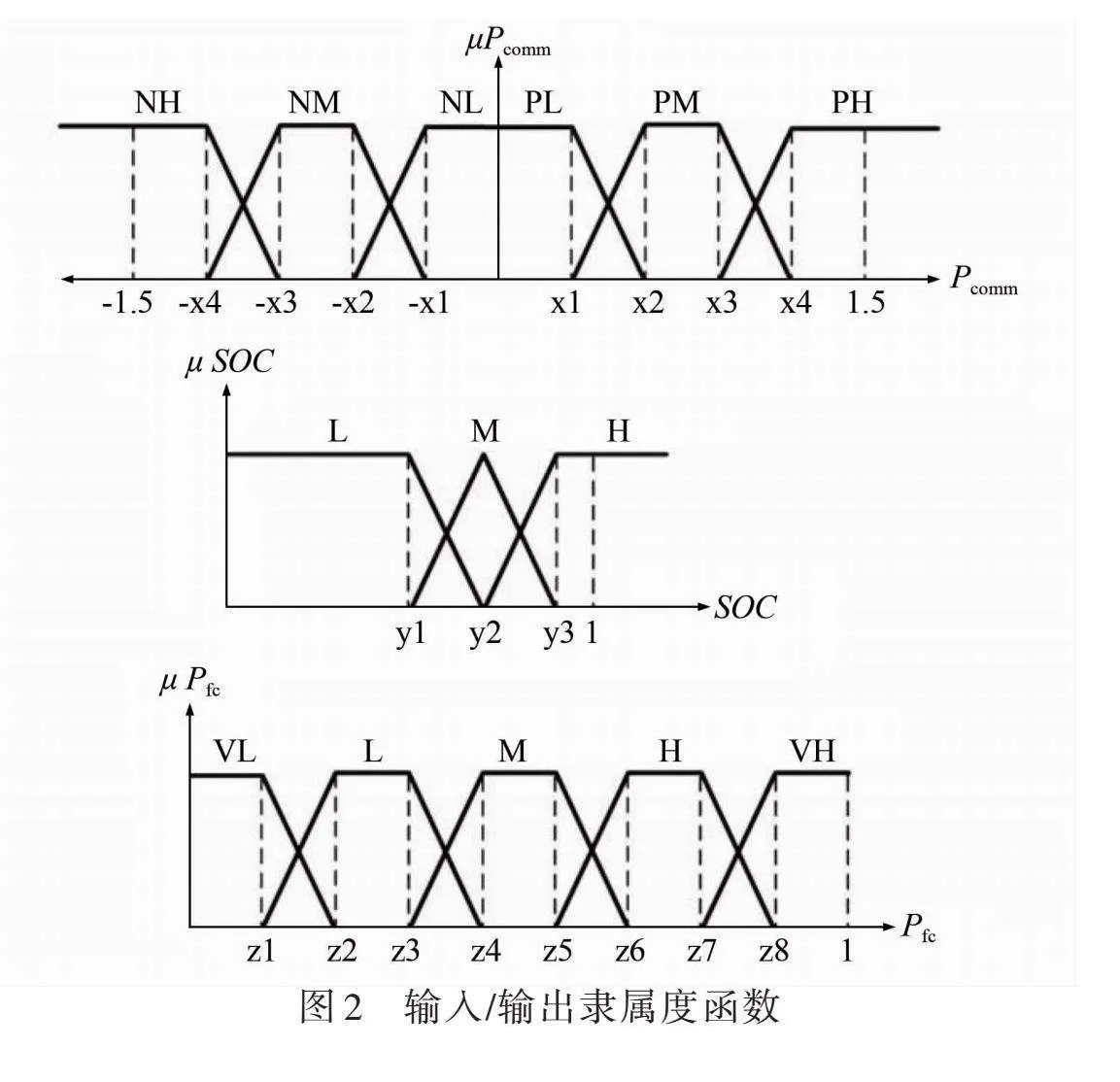
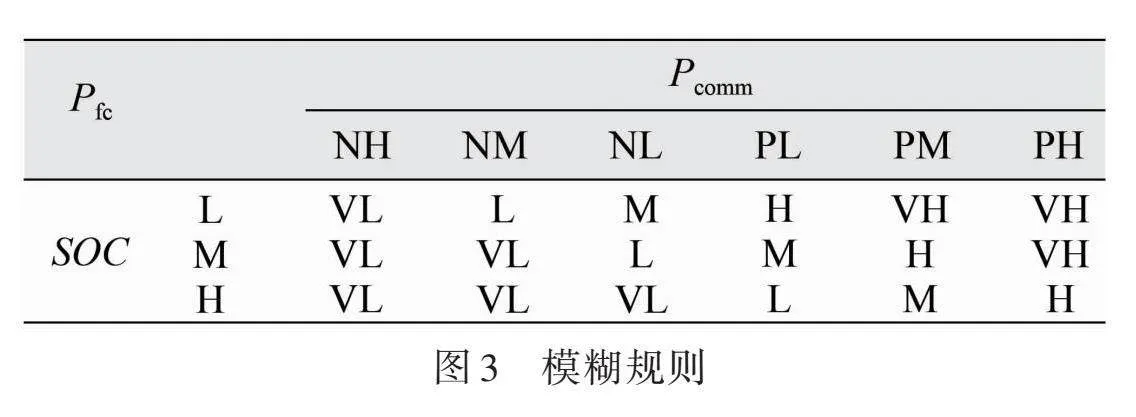
为设计模糊控制系统,首先应确定燃料电池混合动力汽车的模糊知识库,本设计的模糊推理引擎、模糊规则与去模糊化方法的类型分别为Mamdani型、单例与重心法,如图2~图3所示。
图中N、P、L、M、H分别定义为负、正、小、中、大,用于表示误差变化的程度,同时为合理利用超级电容的高能量密度与能量回收特性,提高整车的燃油经济性,建立系统传递函数为:
[Gs=1Pfcs+1] (6)
式中:Pfc——燃料电池功率,由指导功率Pcomm与电荷状态SOC进行动态调整。
2.3" 遗传算法参数优化
由于传统模糊控制规则的设计需要专业知识与经验,而且调试后才能够得到准确的结果;同时,选择合适的隶属函数和模糊集合对模糊算法的性能至关重要,不恰当的选择可能导致模糊推理结果不准确或不稳定;此外,传统模糊算法对输入数据中的噪声与不确定性较为敏感,如果模糊算法不能有效地处理这些噪声,其性能和鲁棒性可能会受到影响。
针对以上问题,本文采用遗传算法对模糊规则进行优化,得到最优的模糊规则后根据输入变量进行模糊判断,以提高算法的准确性与鲁棒性。
2.3.1" 染色体编码
遗传算法中的染色体编码是将问题的解表示为一个染色体相应的编码,以便进行遗传操作。染色体编码的设计对于算法的效果和收敛速度具有重要影响。
二进制编码通常将问题的解表示为一个二进制字符串向量,每个基因位上的值为0或1。例如,根据上述所建模糊控制器,可以使用长度为2×9=18的染色体表示,图3的模糊规则中的VL可编码为100101001011101011,在算法搜索完成之后可以将编码还原为对应问题的解。
2.3.2" 适应度评估
为了达到提高车辆燃油经济性的目的,引入前文中能量表征参数Pm、PPS、Pfc、E、CE、CP与车辆在相关工况下的等效氢耗作为适应度函数的优化指标,适应度函数具体为:
[f=k1×Pm+PPS+Pfc+k2×E+CE+CP+k3×W−1] (7)
式中:k1、k2、k3——相关权重系数,分别取值k1=0.6、k2=0.8、k3=1。W的计算式为:
[W=MH2×nbatI2F] (8)
式中:W——氢气消耗量;MH2——氢气的摩尔质量;nbat——电池个数;I——电池电流;F——法拉第常数。
2.3.3" 种群选择、交叉与变异
选择操作选用轮盘赌法,得出算法中第i个个体的概率Pi为:
[Pi=fi fi] (9)
式中:fi——变异个体的适应度,之后使用自适应方法对算子的交叉与变异几率进行调整。
[Pc=h1×fm−fsfm−fa," fm≥fah2," fmlt;fa] (10)
[Pm=h3×fm−fsfm−fa," fm≥fah4," fmlt;fa] (11)
式中:Pc——自适应交叉概率;Pm——自适应遗传概率;fm、fs、fa——最大自适应、交叉个体中较大适应度与平均适应度。h1、h2、h3、h4的取值分别为0.6、0.8、0.1与0.1。
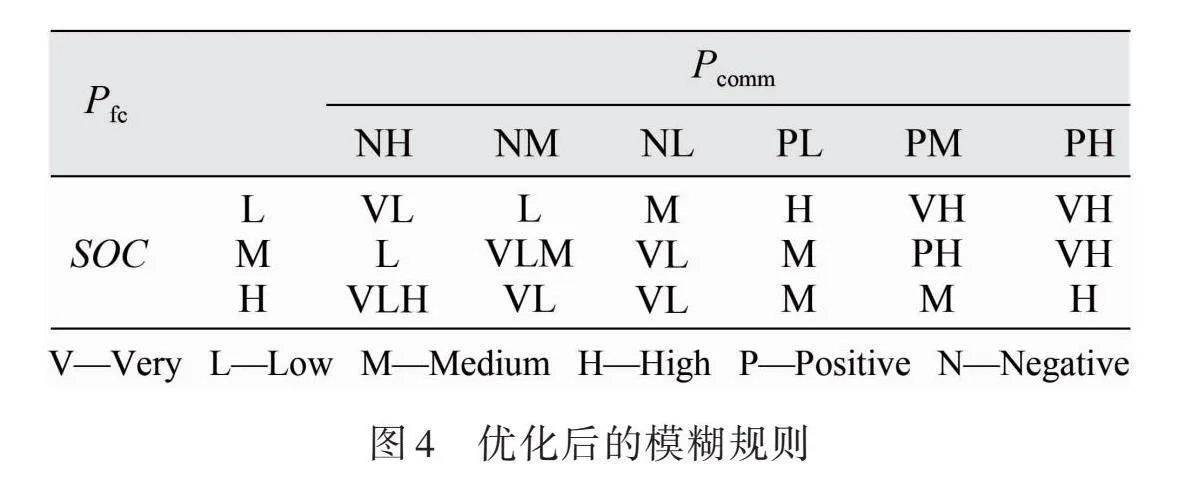
2.3.4" 优化结果
针对模糊能量控制系统,选定遗传算法的种群数量为40,迭代次数为60次,可得优化后的模糊规则如图4所示。
3" 仿真模型建立与结果分析
3.1" 仿真模型建立
为验证基于遗传模糊控制的燃料电池汽车油耗降低方法的有效性,使用MATLAB/Simulink进行仿真,构建燃料电池混合动力汽车相关控制模型,并与传统模糊控制算法进行对比。
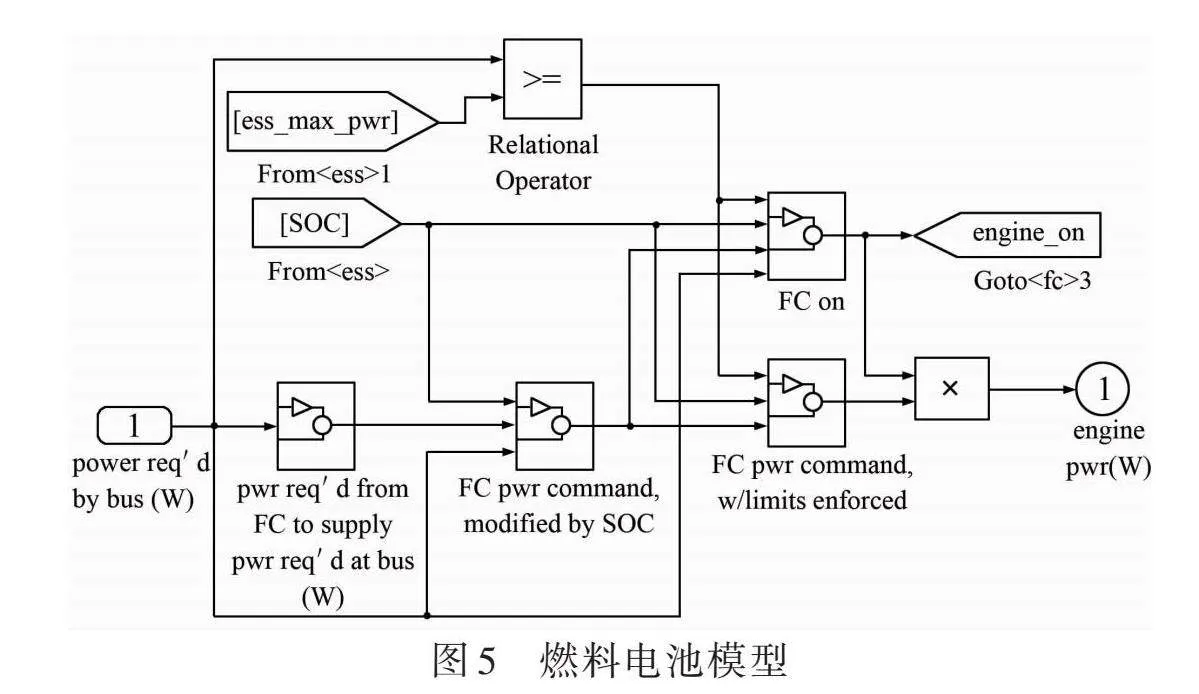
其中燃料电池、遗传模糊控制策略与动力电池充电模型具体如图5~图7所示。
3.2" 仿真结果分析
WLTP为一种用于评价车辆燃油经济性与排放性能的全球化测试标准,WLTP相对于NEDC更为现代化和精确,更好地反映了真实驾驶条件下的汽车性能。其在全球范围内得到了广泛的采用,现已成为许多国家与地区的法定测试标准。
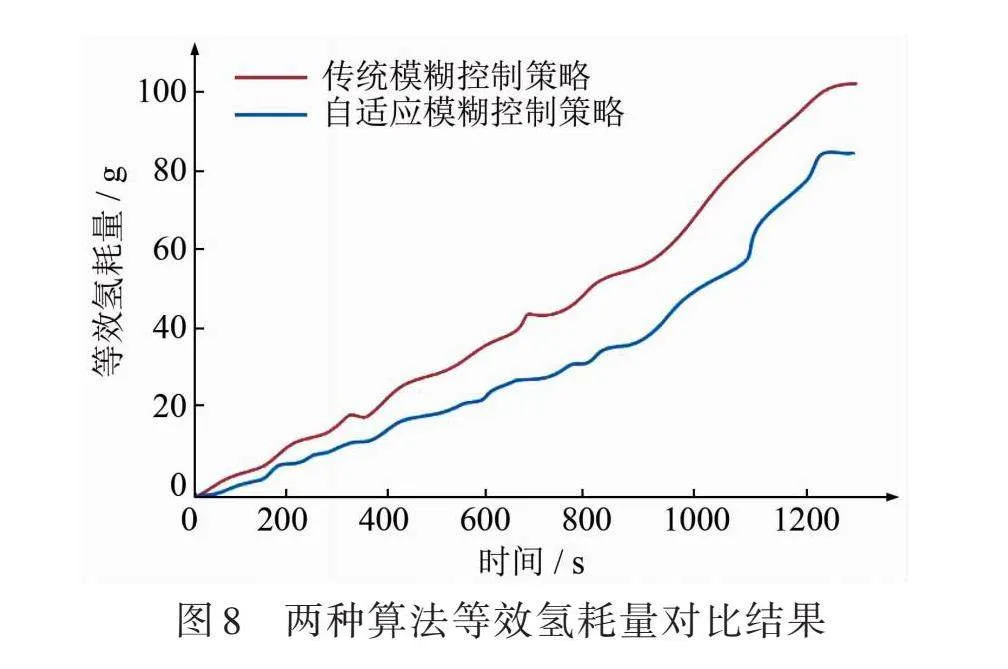
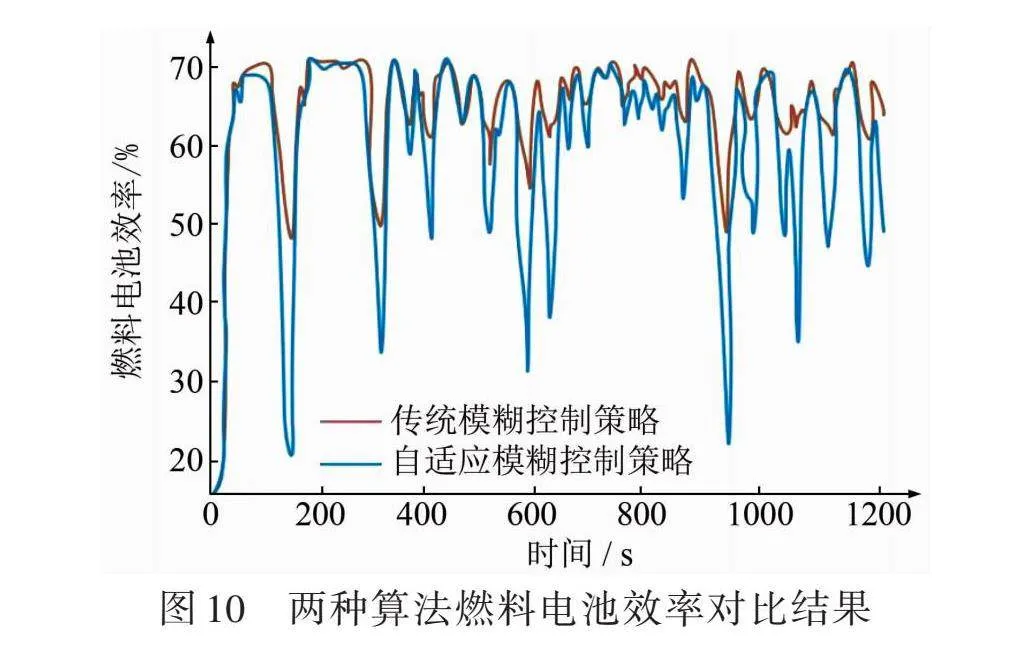
本文采用WLTP工况对车辆具体性能进行分析,仿真结果如图8~图10所示。
由图8可得,传统模糊控制算法的最终氢耗量为102.80g,而自适应模糊算法的最终氢耗量为81.90g,故所提出方法相对于对比算法等效氢耗量降低了20.3%,使目标车辆的燃油经济性显著提高。
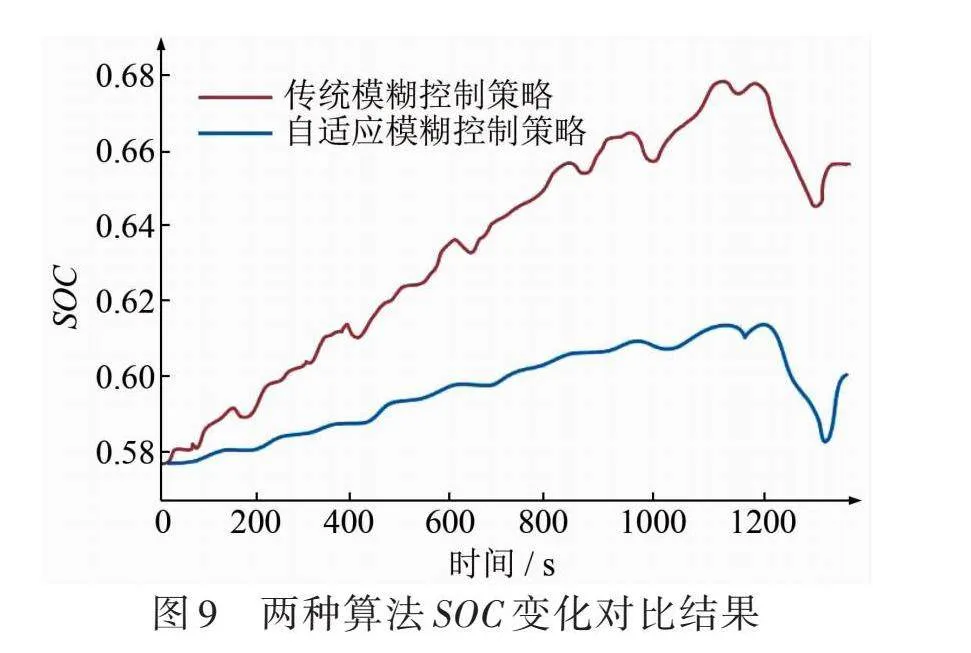
由图9可知,在WLTP工况下自适应模糊控制策略电池SOC值相较于传统模糊控制策略电池SOC值波动更小,动力电池的荷电状态维持能力明显提高。虽然较于优化前SOC值有所降低,但整体循环工况下SOC值仍处于适宜区间,同时也体现了适当牺牲动力电池保护燃料电池的优化理念。
由图10可知,燃料电池整体工作效率较高,但传统模糊控制策略的效率变化频繁且波动区间较大,而燃料电池在遗传模糊策略的作用下效率波动次数与范围均有所降低,进而效率频繁波动所导致的燃料电池性能衰退现象逐渐减少,燃料电池系统鲁棒性也有所提高。
4" 结论
本文为提高燃料电池混合动力汽车的燃油经济性,并解决常规模糊控制中存在的参数优化与调节相对困难、构建隶属度函数主观性高与鲁棒性差等问题,提出一种基于遗传模糊控制的燃料电池混合动力汽车燃油经济性提高方法。与传统模糊控制算法进行对此,通过MATLAB/Simulink仿真平台,仿真验证了所提出控制策略效果。仿真结果表明如下。
1)遗传模糊控制算法相对于对比算法,等效氢耗量降低了20.3%,使目标车辆的燃油经济性显著提高。
2)此算法在WLTP工况下电池SOC波动更小,动力电池的荷电状态维持能力明显提高,同时体现了适当牺牲动力电池保护燃料电池的优化理念。
3)加入遗传模糊控制算法后,通过遗传算法优化模糊控制,避免了构建模糊规则与隶属度函数主观性高等问题,使其效率波动次数与范围均有所降低,进而效率频繁波动所导致的燃料电池性能衰退现象逐渐减少,提高了燃料电池系统的鲁棒性。
参考文献
[1]" 王天祥.燃料电池混动汽车能量管理策略研究[J].河南科技,2023,42(10):26-29.
[2]" 屠畅.燃料电池混合动力汽车能量管理控制策略研究[D].太原:中北大学,2023.
[3]" 王志福,罗崴,徐崧,等.燃料电池汽车能量管理策略综述[J].电池,2022,52(3):328-332.
[4]" 刘静,孙闫.基于模糊控制的燃料电池汽车能量管理研究[J].公路与汽运,2022(4):11-13.
[5]" 马洋洋. 基于出行特征预测的燃料电池汽车能量管理策略研究[D].长春:吉林大学,2023.
[6]" 王敖.融合工况识别的燃料电池汽车自适应能量管理策略研究[D].襄阳:湖北文理学院,2023.
[7]" 赵天宇,陈东,霍为炜,等.氢燃料电池汽车能量管理系统模糊控制仿真研究[J].重庆理工大学学报(自然科学),2022,36(3):36-40.
[8]" 王毅,仝志辉,尉庆国,等.基于离散LQR的无人驾驶车辆横向控制方法[C]//东北大学,中国自动化学会信息物理系统控制与决策专业委员会.第34届中国控制与决策会议论文集(1),2022.
[9]" 陈佳星,宋震,章桐.基于车辆行驶信息预测的燃料电池汽车能量管理策略研究[J].机电一体化,2021,27(5):3-13.
[10] 王骞,李顶根,苗华春.基于模糊逻辑控制的燃料电池汽车能量管理控制策略研究[J].汽车工程,2019,41(12):1347-1355.
[11] KABZAN J,HEWING L,LINIGER A,et al. Learning based model predictive control for autonomous racing[J].IEEE Robotics and Automation Letters,2019,4(4):3363-3370.
[12] HU C,WANG Z,TAGHAVIFAR H,et al. MME EKF-Based path-tracking control of autonomous vehicles considering input saturation[J]. IEEE Transactions on Vehicular Technology,2019,68(6):5246-5259.
[13] HANG P,CHEN X,ZHANG B,et al. Longitudinal velocity tracking control of a 4WID electric vehicle[J].IFAC PapersOnLine,2018,51(31):790-795.
[14] SHAKOURI P,ORDYS A,LAILA D S,et al. Adaptive cruise control system:Comparing gain-scheduling PI and LQ controllers[J].IFAC Proceedings Volumes,2011,44(1):12964-12969.
(编辑" 杨凯麟)
