基于视觉纠偏的原油储罐浮船板焊接机器人研究
2025-01-31李翊刘杰刘长沙杜付鑫浦健民










摘 要 为提高原油储罐浮船板焊接质量,采用基于视觉纠偏的方法对原油储罐浮船板焊接机器人进行了研究。首先搭建并标定了焊接机器人视觉系统,设计了一套焊缝图像处理与特征点提取方法;然后建立了三维焊接机器人模型、焊枪模型和线结构光视觉传感器仿真模型,并采用基于迭代最近点配准算法进行了焊接视觉纠偏,获得了真实的焊缝位置;最后进行了焊缝轨迹离线纠偏实验,通过离线焊缝纠偏解决了浮船板工件定位不精确导致传统示教模式下焊接机器人无法精确焊接的实际工程问题。
关键词 原油储罐 浮船板 图像处理 视觉纠偏 焊接机器人
中图分类号 TP242"" 文献标志码 A"" 文章编号 1000 3932(2025)01 0063 07
在海上石油开采和运输中,主要使用大型原油储罐浮船。浮船板是浮顶罐的重要组成部分,浮船板的焊接是储罐施工过程中的一个重点,也是一个难点。目前浮船板焊接方法采用的是传统的手工电弧焊和带有行走机构的半自动焊接设备[1]。通过前期对浮船板施工现场进行调研发现,当前焊接作业存在以下局限性:
a. 焊缝长度跨度较远,设备不具备主动感知焊缝的能力,焊接质量难以保证;
b. 焊接过程由人工监管,焊接设备自动化程度低,产品稳定性差;
c. 工人劳动强度大,焊接效率低,特别是在进行仰焊作业时由于环境恶劣、工艺复杂,难以进行长时间有效作业。
针对以上焊接问题,笔者将基于机器视觉的焊缝信息提取作为主要研究内容,对浮船板焊接机器人进行研究,针对平面直线焊缝实现智能焊接,这对于提高浮船板焊接质量和焊接效率具有重要意义。
1 焊接机器人视觉系统搭建与标定
1.1 焊接机器人视觉系统搭建
基于传统焊接现存的问题,设计并搭建了结构光视觉传感系统。焊缝的相关信息将采用结构光视觉传感系统进行采集。焊缝的相关信息主要包括焊缝位置信息和焊缝形貌信息,这两类信息分别用于焊接机器人纠偏和焊接材料表层缺陷扫描。
焊接机器人、结构光视觉传感器、焊接电源、控制柜和PC主机5个部分共同构成了焊接机器人视觉系统。其中,在焊接机器人焊枪位置处安装结构光视觉传感器,结构光视觉传感器由自带工业以太网接口并能高速传输数据的相机、镜头和激光发射器3部分组成,从而获得激光图片。PC主机通过线缆分别与控制柜和结构光视觉传感器联通,由此在PC主机上可以实时获得高清图像,并控制焊接机器人的作业姿态。图1为基于视觉纠偏的原油储罐浮船板焊接机器人架构。
1.2 焊接机器人视觉系统标定
笔者采用视觉测量系统手眼关系标定和线结构光传感器激光平面标定对焊接机器人视觉系统进行标定。
1.2.1 视觉测量系统手眼关系标定
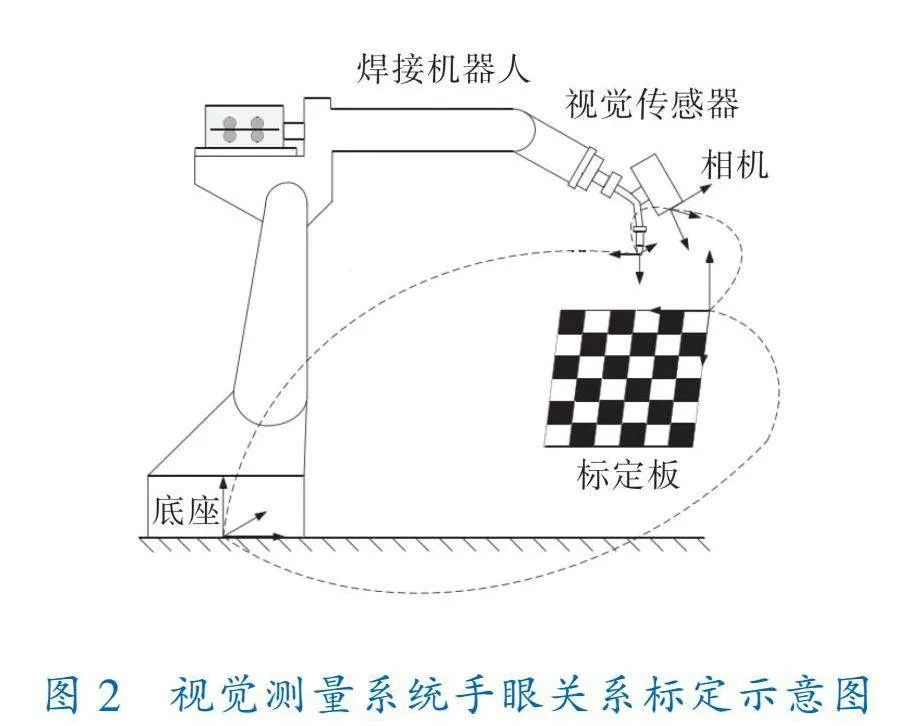
线结构光传感器安装在焊接机器人焊枪前端侧面,焊接作业时将伴随焊接机器人动作,采用“手-眼标定”的方法对视觉测量系统进行标定后,可以将焊缝位置由相机坐标系转换到机器人基座坐标系下。图2为视觉测量系统手眼关系标定示意图。
1.2.2 线结构光传感器激光平面标定
采用四点不变性原理对线结构光传感器发射的两条相交激光线进行标定,根据两条相交平行线的端点确定出激光线与标定板圆点构成的直线交点。焊接机器人作业过程中不断改变姿态,获取不同的高清照片,从而根据两条相交直线和四点得出线结构光平面方程。
2 焊缝图像处理与特征点提取
线结构光视觉传感器相较其他类型传感器,优势在于具有精度高、信息量大等特点。在焊接机器人现场施工过程中,现场环境会对传感器采集的信息造成干扰,如火化、烟雾等,导致采集到的焊缝图像存在噪声和干扰。针对噪声和干扰对图像识别的影响,设计了一套合适的焊缝图像处理与特征点提取方法。
焊缝图像处理与特征点提取方法分为以下3步:
a. 判定已获得的图像焊缝特征的圈定区域,选用中值滤波对方差法分割后的焊缝图像进行降噪处理;
b. 为保证传感器采集图像中线结构光条纹的连通性,采用“开+闭运算”形态学进行操作;
c. 采用灰度重心法获得线结构光条纹的中心线,从而获得线结构光条纹中心线的状态和实时位置信息[2]。
2.1 图像圈定区域提取
从采集到的焊缝图像中截取部分作为研究对象进行分析,初始图像如图3a所示。在初始图像(大小为1100×550)中设定图像圈定区域的大小为450×220,采集到的初始位置坐标设定为(350,240),目前圈定区域面积为原始图像面积的13.96%,圈定区域提取结果如图3b所示。采用图像圈定区域提取方法对采集到的焊缝初始图像进行处理,圈定了有效的分析范围,提高了处理图像的速度并减小了噪声干扰。
2.2 图像滤波、分割及形态学处理
图像噪声主要来自于两个部分,一是工件材质粗糙而出现激光散射、自然光源干扰及传感器性能等因素的影响;二是焊接时的弧光飞溅、弧焊产生的烟雾和飞尘的影响。为了有效抑制图像噪声,需要采用中值滤波对图3b中的圈定区域提取结果进行滤波,从而去除90%以上的噪声并增强焊缝边缘信息。
激光漫反射是采集图像过程中经常出现的状态,为防止激光漫反射对激光条纹的干扰,采用基于阈值的图像分割处理方法将激光漫反射的干扰进行分离,从而保证激光条纹的精度。其中,阈值将通过最大类间方差法进行求取。
通过多次试验可知,基于阈值的图像分割处理方法效率高,可以满足焊接实时性的要求,有效增强了激光条纹的对比度,保护了采集图像的边缘信息,能够准确检测出焊缝图像的边缘位置。
焊缝图像经过滤波、切割等步骤,焊缝图像中的激光条纹依然有切割面毛刺、气孔等缺陷,缺陷会使焊缝图像中心线和特征点的提取难度变大、提取精度变低。因此选择“开+闭运算”形态学的方法对焊缝图像进行处理,用以消除空洞和边缘不齐的部分,让焊缝图像的边缘部分更加光滑[3]。图4分别为圈定区域提取结果、中值滤波后结果、最大类间方法图像分割、“开+闭运算”形态学处理图。
2.3 中心线、特征点提取
焊缝图像经过滤波、分割及形态学一系列处理后,可以得到激光条纹图像。在此基础上采用灰度重心法对激光条纹图像进行中心线、特征点的提取,需以焊缝图像中激光条纹像素点的灰度值来确定提取过程中激光条纹的中心。
图5为基于灰度重心法的中心线、特征点提取效果图。
3 基于仿真和迭代最近点配准算法的焊接纠偏方法
经过焊缝图像处理与特征点提取,得到了去除噪声后的高质量图像,通过图像处理后获得焊缝位置,并将得到的焊缝位置转换为机器人坐标系下的坐标,从而进一步实现纠正机器人作业位姿的目的。
但当机器人处于特殊位姿时,反射光晕会遮挡住焊缝位置处,此时需要使用焊缝识别算法进行焊接纠偏。
3.1 基于线结构光视觉系统虚拟仿真平台的先验信息获取
在基于线结构光视觉系统的虚拟仿真平台中载入工件模型,便可针对真实视觉的检测过程进行可视化仿真[4],仿真平台如图6所示。手眼标定结果、相机内部矩阵及激光平面方程等传感器参数均可应用于仿真状态得到模拟激光条纹。
仿真过程分为以下3步:
a. 确定虚拟激光器发射的初始起点位置。
b. 将初始起点位置作为中心,以相同的角度在空间360°范围内进行等间隔划分,即将激光平面划分为无限条激光线束(无数个激光点集)。
c. 在仿真平台中载入工件模型后,选择线-面相交算法得出激光线束与工件表面的交点。根据标定值,即可将x y z三维坐标系的交点转换到焊缝图像坐标系下,同时获得三维环境下的仿真激光条纹。
3.2 焊缝识别算法设计、分析
焊缝识别算法设计、分析选择基于仿真信息和迭代最近点配准的焊缝位置提取方法。
3.2.1 图像预处理方法
采用文中2.2节的方法对焊缝图像进行处理,图7a、b、c、d依次为图像预处理结果的圈定区域提取结果、中值滤波后结果、最大类间方法图像分割和“开+闭运算”形态学处理。
3.2.2 基于迭代最近点配准算法的图像处理方法
采用基于迭代最近点(Iterative Closest Point,ICP)配准算法的图像处理方法对焊缝图像进行处理,通过若干次的迭代,精确配准完成两个副点,此时配准后的仿真焊缝位置即真实的焊缝位置[5]。
4 焊缝轨迹离线纠偏实验
针对非标工件加工误差较大的问题,焊接之前在线结构光视觉传感器检测出焊缝轨迹后,通过离线纠偏的方式对示教轨迹进行调整,从而适应定位精度不高的非标工件焊接[6]。离线纠偏流程如图8所示。
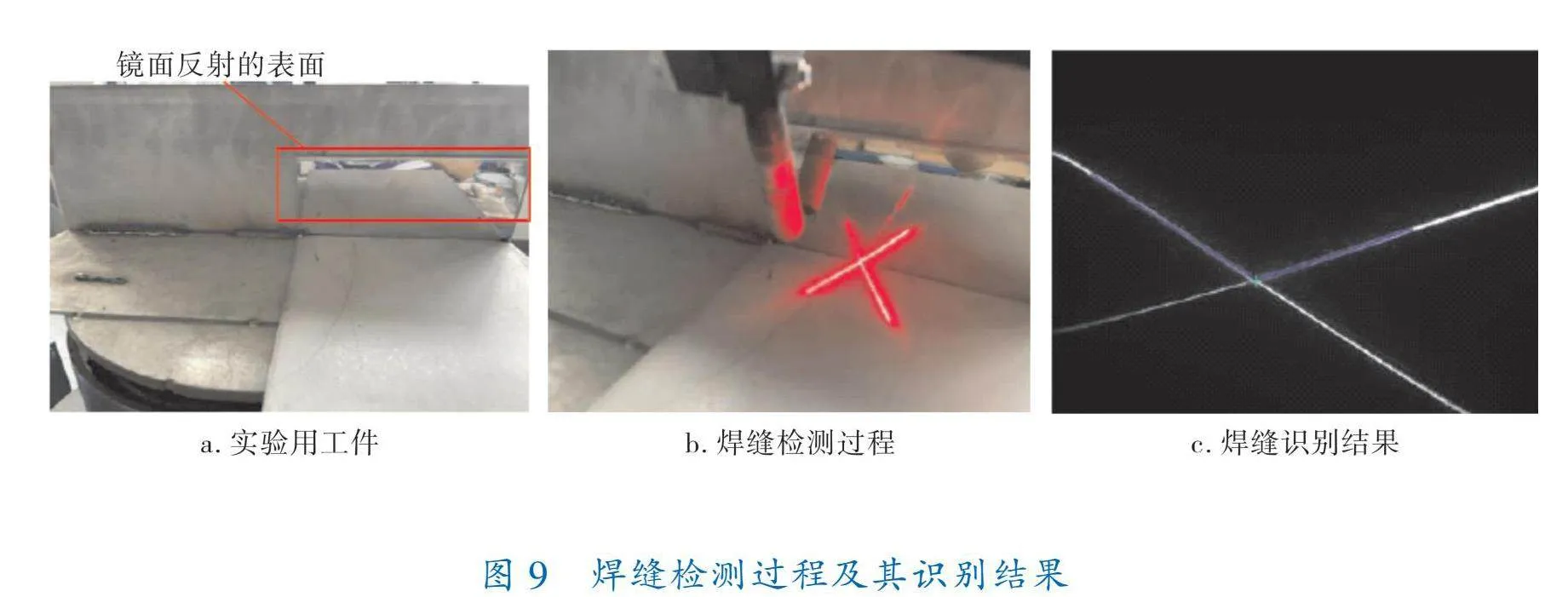
实验以浮船板表面工件为例,工件表面易反光,焊缝类型为T形对接直线焊缝,如图9a所示。焊缝轨迹离线纠偏实验分为3步:
a. 对工件的焊缝进行示教,获得相应的示教程序;
b. 如图9b所示,将激光线束投射到焊缝位置,完成基于线结构光视觉系统的焊缝检测并按照检测结果对示教程序进行更新;
c. 采用基于ICP配准算法的图像处理方法对焊缝图像进行处理,焊缝位置识别结果如图9c所示,此时启动更新后的示教程序结束焊接作
业[7]。
采用ICP配准算法配准焊缝仿真轨迹和真实轨迹,焊缝离线纠偏情况如图10所示。在放置工件后,选择线结构光视觉传感器对焊缝位置(红色圆点组成的线段)进行检测,同时采用标定矩阵的方法将采集到的照片转换为笛卡尔坐标系,并标记为蓝色圆圈组成的线段。当焊缝仿真轨迹和真实轨迹间距大于5 mm时,通过采用ICP配准算法,焊缝示教轨迹会变换到焊缝仿真轨迹上。
在进行焊缝轨迹离线纠偏实验的过程中,实时记录纠偏轨迹的匹配结果,焊缝仿真轨迹和真实轨迹之间的距离最大值为0.426 mm,最小值为0.126 mm,平均值为0.219 mm,均方根误差为0.232 mm。实验结果表明,离线纠偏轨迹的匹配效果较好,更新后的示教轨迹可以很好地匹配到焊缝仿真轨迹上。
启动更新后的示教程序后结束焊接作业,图11a、b、c分别为焊枪末端运动轨迹、轨迹偏差和实际焊接场景。离线焊缝纠偏方式解决了浮船板工件定位不精确,而使得传统示教模式下焊接机器人无法精确焊接的实际工程问题。焊接效果如图11d所示,工件的焊接表面光滑,焊接定位准确,焊接美观且焊缝质量良好。针对同规格尺寸的工件在使用离线焊缝纠偏的过程中,仅需人工示教一次,每安装完成一个工件的同时进行一次焊缝检测,即可得到当前工件最优的焊接示教程序,有效提高了焊接效率。
5 结束语
通过研究并结合工程实际,搭建了焊接机器人视觉系统,实现了在焊接过程中提取焊缝,从而对焊接机器人进行纠偏。对焊接机器人和原油储罐浮船板实验工件进行了可视化仿真,获得了仿真激光线,并将其作为焊接纠偏算法的先验信息。利用焊缝图像处理与特征点提取方法对图像进行了预处理,完成了图像降噪工作;然后采用基于迭代最近点配准算法,将源点集和目标点集进行了配准,用焊缝检测轨迹更新焊缝示教轨迹,完成了焊接纠偏。经实验验证,该技术提升了焊接设备的自动化水平,缩短了施工工期,并有效保证了焊接质量。
参 考 文 献
[1] 邢世钰.大型储罐浮船焊接变形控制技术的应用[J].石油和化工设备,2018,21(8):38-40.
[2] 龚烨飞,程艳花,赵广志,等.基于面结构光视觉检测的机器人焊缝铣削导引[J/OL].计算机集成制造系统,1-22[2023-12-29].http://kns.cnki.net/kcms/detail/11.5946.TP.20230920.1027.012.html.
[3] 朱成祥.基于视觉引导的焊接机器人焊缝纠偏技术的研究[D].长春:长春工业大学,2023.
[4] 王文楷,石玗,张刚,等.基于激光视觉检测的焊缝轨迹离线规划[J].电焊机,2023,53(9):55-60.
[5] 张国强,荆炀.基于焊缝特征的焊接路径视觉辨识方法研究[J].化工自动化及仪表,2020,47(6):497-502.
[6] 李海周.基于BIM的免示教焊接机器人在钢结构智能建造中的应用[J].施工技术(中英文),2023,52(5):36-40.
[7] 夏攀.基于深度学习的机器人焊缝跟踪技术研究[D].襄阳:湖北文理学院,2023.
(收稿日期:2024-01-06,修回日期:2024-11-29)
Research on Welding Robot for Floating Ship Plates of Crude
Oil Storage Tanks Based on Visual Correction
LI Yi1, LIU Jie1, LIU Chang sha1, DU Fu xin2, PU Jian min1
(1. China Construction Industrial amp; Energy Engineering Group Co.,Ltd.;
2. School of Control Science and Engineering, Shandong University)
Abstract"" With a view to ensuring the welding quality of crude oil storage tanks, having a visual correction based to study the welding robot for floating ship plates of crude oil storage tanks was implemented. Firstly, having the welding robot vision system built and calibrated and both welding seam image processing and feature point extraction methods designed; then, having a 3D welding robot model, a welding gun model and a simulation model of a structured light visual sensor established, including having an iterative nearest point registration algorithm based to implement welding visual correction so as to obtain the real welding seam position; finally, having an off line correction experiment conducted on the weld trajectory. The results show that, the off line welding deviation correction can solve the problem that the welding robot doesn’t accurately work in a traditional teaching mode because of the workpiece’s inaccurate positioning of the floating ship plate.
Key words"" crude oil tank, floating boat plate, image processing, visual correction, welding robot
