基于被动式红外传感器防宠菲涅尔透镜的设计
2025-01-21杨柯张晓龙

摘 要:随着智能安防技术的不断进步,热释电红外传感器已成为研究领域的焦点。传统的热释电传感器因探测距离短、探测灵敏度和视场精度较低,不能满足实际应用需求。针对这些缺陷,本文设计了一种“豆点形菲涅尔透镜阵列”,并引入了一种分区设计策略来优化透镜结构。首先,构建了单个透镜的数学模型作为基础。其次,利用3D建模技术去除透镜的多余部分,并且根据从内层至外层分区面积逐渐增大的原则,对透镜进行分区与拼接,得到新型菲涅尔透镜。该设计不仅优化了探测距离,还精确控制了探测角度,有效实现了防宠物误触的功能。最后,本文采用了光线追迹法,通过模拟光线在透镜中的传播路径,分析其光学性能。同时,构建了自动化检测平台,对新型菲涅尔透镜进行了检测。结果表明,该透镜在探测精度与灵敏度方面均表现出色,为热释电红外传感器实现高效防宠功能提供了技术支撑。
关键词:菲涅尔透镜;热释电传感器;防宠功能
中图分类号:O 435 " " " " 文献标志码:A
热释电红外传感器探测系统是一种基于热释电效应的测试系统,能够检测目标(例如行人)释放的红外线能量,并且将其转换为电压信号进行处理。随着成本的持续下降,该系统已广泛应用于防火、防盗报警系统以及非接触式测温装置等民用产品领域。传统的热释电红外探测器存在探测距离近、灵敏度较低的问题。由于技术原因,当前市场上的红外探测器在探测距离、探测角度以及探测范围的精准度方面仍不能满足人们的需求。因此,为解决上述问题,本文在传统菲涅尔透镜设计的基础上进行了优化,通过分区拼接技术,构建了一个圆形菲涅尔透镜阵列。该设计提高了热释电红外探测器的性能,弥补了传统探测器在探测精度和灵敏度方面的缺陷。
1 菲涅尔透镜结构的形成
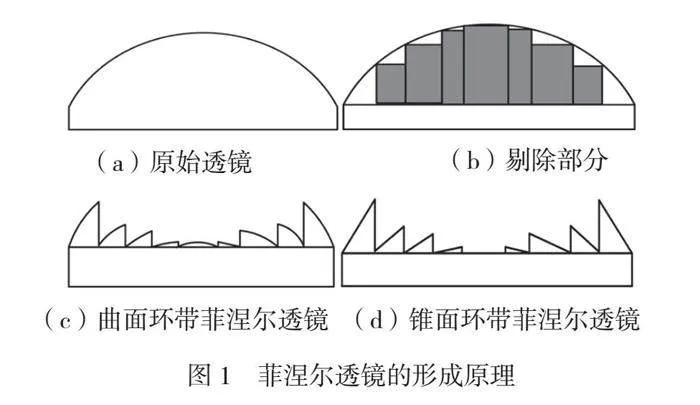
根据几何光学的折射定律可知,一束光经过透镜的前、后表面都会发生折射,但是该折射角的大小只与玻璃材料有关,与玻璃的厚度无关[1]。根据该原理,本文在保证透镜表面曲率不变的条件下,剔割透镜中对光路无影响的部分,得到能够实际应用的菲涅尔透镜。菲涅尔透镜的形成原理如图1所示。
菲涅尔透镜从表面看由若干圈不同半径的同心圆环组成,从侧面看由许多锯齿状的凹槽组成[2]。在几何形状和结构方面,菲涅尔透镜可以分为圆形菲涅尔透镜、菲涅尔透镜阵列、柱状菲涅尔透镜和线性菲涅尔透镜等,分别适用于不同的应用场景和光学需求。其表面不同弧度的圆环称为螺纹,因此菲涅尔透镜也称为螺纹透镜[3]。菲涅尔透镜是由HDPE、PMMA等材料经模具热压制成的,其具有轻、薄和生产成本低等特点。
2 菲涅尔透镜建模
2.1 菲涅尔透镜参数选取
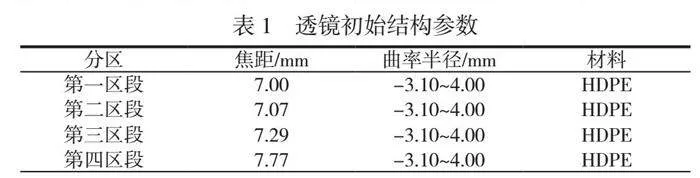
根据不同的功能将菲涅尔透镜分为单区多段、双区多段和多区多段等不同结构[4]。本文设计的菲涅尔透镜主要应用于防宠,对视场精度、灵敏度有较高要求,可以采用圆形多区多段多焦点菲涅尔透镜,也称为豆点形菲涅尔阵列[5]。与传统的单透镜不同,圆形菲涅尔透镜不是一个平滑的曲面,而是由20个单镜片拼接形成的自由曲面[6],即具有20个分区,能够大幅度提高菲涅尔透镜的探测灵敏度。该阵列分为4层,第一层分为1个区,第二个区段分为4个区,第三个区段分为7个区,第四区段分为8个区。每个区段由同一结构参数的单透镜构成,透镜结构参数见表1。
2.2 菲涅尔透镜3D结构设计
本文设计的菲涅尔透镜应用于防宠领域,由于该领域属于非成像光学,因此不对透镜的像差进行优化,设计的重点是精度控制,因此在优化过程中对焦距进行优化,保证所有光线全部聚集在一点,使菲涅尔透镜对红外光的利用率达到最高。一个完整的菲涅尔透镜阵列由N个单透镜拼接形成,菲涅尔透镜阵列3D模型的设计过程可以分为2步。
2.2.1 建模分割
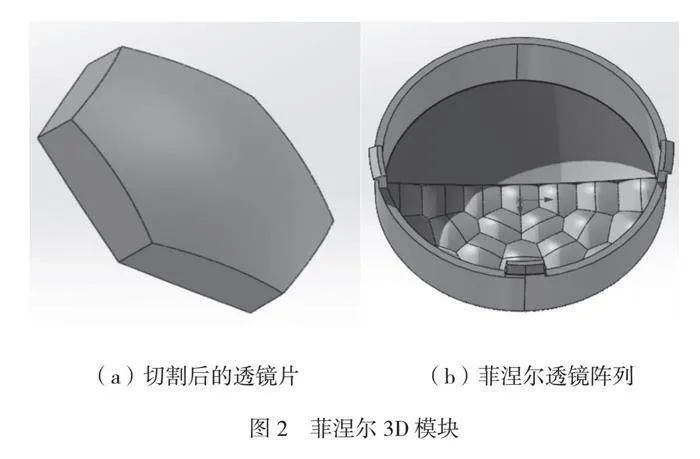
将单透镜导入SolidWorks中,得到其3D模型。根据菲涅尔透镜形成原理,即一束光经过透镜的后表面会发生折射,折射角的大小与透镜材料有关,与玻璃的厚度无关,需要剔割透镜中对光路无影响的部分。本设计采用SolidWorks进行切割,得到的单透镜片如图2所示。
2.2.2 拼接、分区
切割多余厚度的材料后可以得到如图2(a)所示的单透镜片,并对单透镜片进行拼接处理,可以得到由许多单透镜片组成的自由曲面。菲涅尔透镜的视场精度能够控制透镜分区。根据人体不同部位的射能量不同,将阵列中心设为第一层,依次往外为第二、第三和第四层。第一层为1片7 mm焦距的透镜片,第二层为4片7.07 mm焦距的透镜片,第三层为7片7.29 mm焦距的透镜片,第四层为8片7.77 mm焦距的透镜片。为了实现菲涅尔透镜的防宠功能,本文设计的菲涅尔透镜能够精准控制视场精度,并采用半分区处理得到如图2(b)所示的菲涅尔透镜阵列。
在光学设计中,通常采用Zemax光学设计软件进行光线追迹,在非序列模式下,将建立的菲涅尔透镜3D模型导入仿真[7]。仿真包括全分区型菲涅尔透镜光线追迹和半分区菲涅尔透镜光线追迹。在分区过程中,菲涅尔透镜阵列内圈分区面积较小,由内向外分区面积依次增大。由能量强度和接收面积的关系可知,本文提出的分区设计能够使接收单元接收的能量分布均匀,提高了传感器的探测精度和灵敏度。
3 菲涅尔透镜试验与分析
3.1 菲涅尔透镜检测原理
基于热释电效应,热释电红外传感器应用于检测红外辐射[8-9],其工作原理如下:当红外辐射照射到热释电材料表面时,只有在辐射出现情况下才会引起电荷释放,进而利用测量材料表面的电压变化来指示是否存在红外辐射。设辐射造成的温度变化为ΔT,那么此时外接设备中的电流I如公式(1)所示。
(1)
式中:PS为热释电系数;SA为传感器材料面积;T为热释电晶体的温度;t为时间;为热释电晶体的温度变化率。
测量原理如图3所示。对电流I(即电信号)进行提取分析,能够获取人体或动物的相关信息。
试验主要检验本文设计的菲涅尔透镜是否具有防宠功能和探测视场精度是否足够高。记录感应灯报警时的坐标并进行计算,可以得出探测视场精度。人体与宠物身高不同,根据该特征对整个圆形透镜阵列进行半分区处理,从而实现防宠功能。
3.2 试验步骤
3.2.1 装配样机
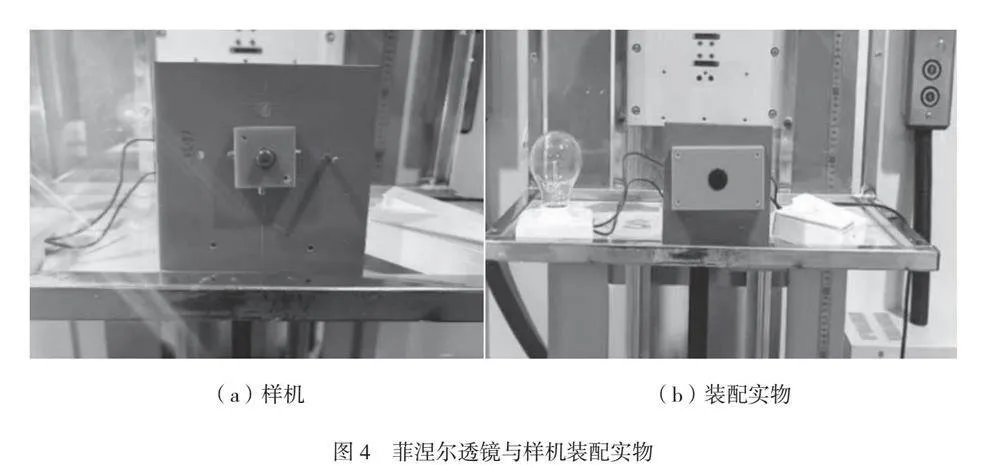
在设计样机过程中,将样机中传感器接收面源中心点到菲涅尔透镜中心距离精确控制为7 mm,使菲涅尔透镜对人体红外辐射光线的利用率达到最大。样机与装配实物如图4所示。
3.2.2 自动化实验平台搭建
根据测量原理设计自动化实验平台,自动化检测平台由步进电机、B2X2热释电红外传感器、热释电红外感应灯、恒温恒湿箱和检测样机组成。
3.2.3 热释电红外传感器探测灵敏度检测
在相同的探测距离下,人体分别以不同的速度做横向移动,获取不同移动速度下的传感器信号,进而对目标移动速度进行灵敏度标定。
3.2.4 精度测量和误报检测
检测平台地面呈现出由传感器向外刻画若干圈的测量路径,每隔1 m刻画一圈。为了使检测结果更精确,分别建立6个测试模型。在试验过程中,使人体离开探测区域,记录小灯闪亮次数,完成误报检测,要求人体以0.5 m/s的速度沿刻画线移动,进而对菲涅尔透镜视场精度进行检测。
3.2.5 防宠功能检测
本次试验要求人体以0.5 m/s的速度匀速走动,经过传感器探测区域时小灯亮,即停止走动,等待小灯熄灭时再进行下一次走动。再采用人体半蹲式的走法模拟宠物走动,以检测防宠功能。
3.3 试验结果分析
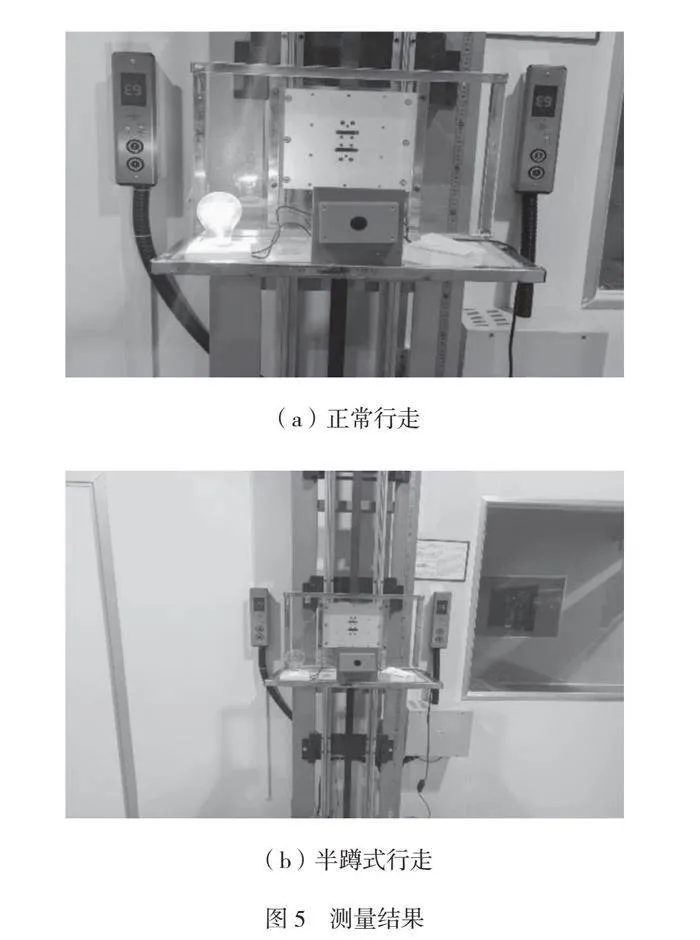
综上所述,分别以0.5 m/s的速度进行正常姿态行走和半蹲式行走,对传感器的探测效果进行检测,测量结果如图5所示。
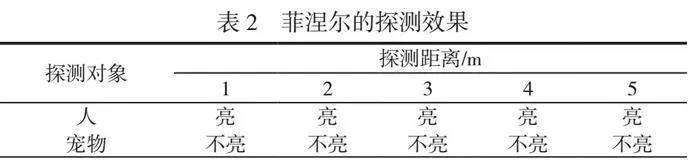
在图5中,小灯亮表示探测器检测到人体,并进行报警;小灯熄灭表示没有检测到人体。小灯亮、灭的结果,即菲涅尔透镜的探测效果见表2。
人体以0.5 m/s速度正常行走,菲涅尔透镜对目标进行检测,小灯全部报警;人体模拟宠物运动,以半蹲式在0.5 m/s速度下行走,菲涅尔透镜再一次对目标进行检测,小灯未报警。由以上2种结果可知,本文设计的菲涅尔透镜配合B2X2传感器能够探测到的目标包括距离该透镜 1 m~5 m 并且运动速度≥ 0.5 m/s 的人体,不包括在同样距离、速度条件下运动的宠物,因此可以有效避免宠物误入探测区域带来的误报,从而实现防宠功能。
根据光线追迹方法和模拟计算可知,本文设计的菲涅尔透镜的视场为140°。在试验过程中记录了感应灯每一个亮的单元,计算得出测量视场精度约为135°,两者相差5°。
4 结语
传统的热释电传感器感应距离lt;2 m,随着智能家居和智能安防镜头发展,传统的热释电传感器已经不能满足工作需求,为了提高传感器的探测精度和灵敏度,本文提出一种新型防宠菲涅尔透镜设计。本文设计的防宠菲涅尔透镜提高了传感器的探测精度和灵敏度,实现了防宠功能,但是在对宠物进行误报探测方面也存在一定不足。本文提出的检测方案只能探测水平移动的物体,关于在垂直区域运动的宠物,例如日常生活中的鸟类宠物,本文没有进行探测试验,不能保证配备该菲涅尔透镜的热释电红外传感器能正常工作,需要进一步研究。
参考文献
[1]刘永强.均匀聚光菲涅尔透镜设计及性能研究[D].哈尔滨:哈尔滨工业大学,2014.
[2]孟松涛.辊筒模具多边形菲涅尔结构加工方法研究[D].广州:广东工业大学,2021.
[3]海大鹏.菲涅尔透镜的加工工艺研究[D].哈尔滨:哈尔滨工业大学,2007.
[4]何烨林,张军.用于人体姿态估计的菲涅尔透镜设计[J].应用光学,2020(3):597-602.
[5]周海波.多焦点菲涅尔透镜的设计与性能分析[D].杭州:浙江工业大学,2015.
[6]姚佩琦.基于微透镜阵列及漫射自由曲面的研究与设计[D].南昌:华东交通大学,2021.
[7]苏金炎.菲涅尔透镜拼接失调误差分析与仿真[D].北京:中国科学院大学(中国科学院光电技术研究所),2017.
[8]杨靖.一种热释电红外人体动作形态传感器的研究[D].北京:清华大学,2010.
[9]杨田野.基于热释电红外信号的人员被动定位技术研究[D].武汉:华中科技大学,2023.
