多通道航磁同步数据采集系统的研制
2025-01-02陈卓琳胡星星滕云田刘高川沈晓宇曹瑜珈


摘要:针对无人机多传感器矢量磁测补偿系统,研制了一套小体积、低功耗的多通道数据同步采集系统。该系统采用模拟采集和控制部分分开设计的方法。模拟采集部分基于STM32处理器STM32F103C8T6,集成了9通道24位高精度的模数转换芯片ADS1255、倾角和温度传感器,能够实现9通道数据的同步采集、飞行载体的倾角数据和温度数据的获取。控制部分基于32位ARM低功耗处理器S3C2416和嵌入式LINUX系统,完成了数据实时采集、SD卡存储、GNSS同步校时和网络通信等功能,并具有功耗低、体积小的特点,满足了机载数据采集系统特定的应用需求。
关键词:无人机航磁;数据采集;多通道;ARM
中图分类号:P315.62"" 文献标识码:A"" 文章编号:1000-0666(2025)01-0151-08
doi:10.20015/j.cnki.ISSN1000-0666.2025.0016
0 引言
研究地表处的磁场有助于地震学家了解孕震区地下介质电导率在地震发生前的变化。地震预报专家基于震磁异常效应的预测分析方法,在以往许多中强震前给出了有效的预测意见(倪晓寅,洪旭瑜,2022;翟世龙等,2024)。因此,开展高分辨率的地磁场观测在地震科学研究和地震监测预报等方面具有重要应用价值。无人机磁测是近年来迅速发展起来的一种地磁观测方式(崔志强等,2016)。通过无人机搭载磁测系统,可以探测地磁监测空白区的磁场变化情况,能够在很大程度上弥补地面地磁台站观测的不足(王猛等,2022;张永旺等,2022)。但由于无人机机体铁磁性材料及电子设备的干扰,无人机矢量磁测数据经姿态校正后仍无法与地面台站观测数据质量相比(郭华等,2022;杜俊岐,2021),因此,对机体干扰磁场补偿是提高航磁测量数据质量的关键(高全明,2020)。现有的采用多传感器的差分补偿方法,即在机头、两侧机翼分别放置一个传感器,能够克服机体自身剩磁干扰(朱学军,2014;赵琳等,2018),提高磁测数据质量。传感器一般采用低功耗、小体积的磁通门矢量传感器,而数据采集系统需要根据实际应用需求进行定制化研制。为了采集低噪声、高精度的无人机磁测数据,本文针对3个磁通门传感器补偿系统,研制了能够接入3个三分量传感器的多通道数据同步采集系统。该系统由模拟采集和控制两部分功能模块组成,分开设计成相应的两块体积较小的电路板,以便适应空间有限的安装应用环境。其中,模拟采集部分采用高性能低功耗的32位微处理器STM32F103C8T6,完成9通道数据的同步采集、温度数据和倾角数据的获取,可满足无人机磁测系统的重量要求和姿态校正需要(Funaki et al,2014);控制部分基于ARM+LINUX嵌入式系统为程序运行平台,实现GNSS精确授时和本地大容量数据存储及网络传输接口,方便存储数据文件的下载和后接无线模块进行实时传输。该采集系统体积小、功耗低,能够满足中小型无人机对载荷重量和搭载空间有限的需求(周普志等,2022)。
1 系统设计方案
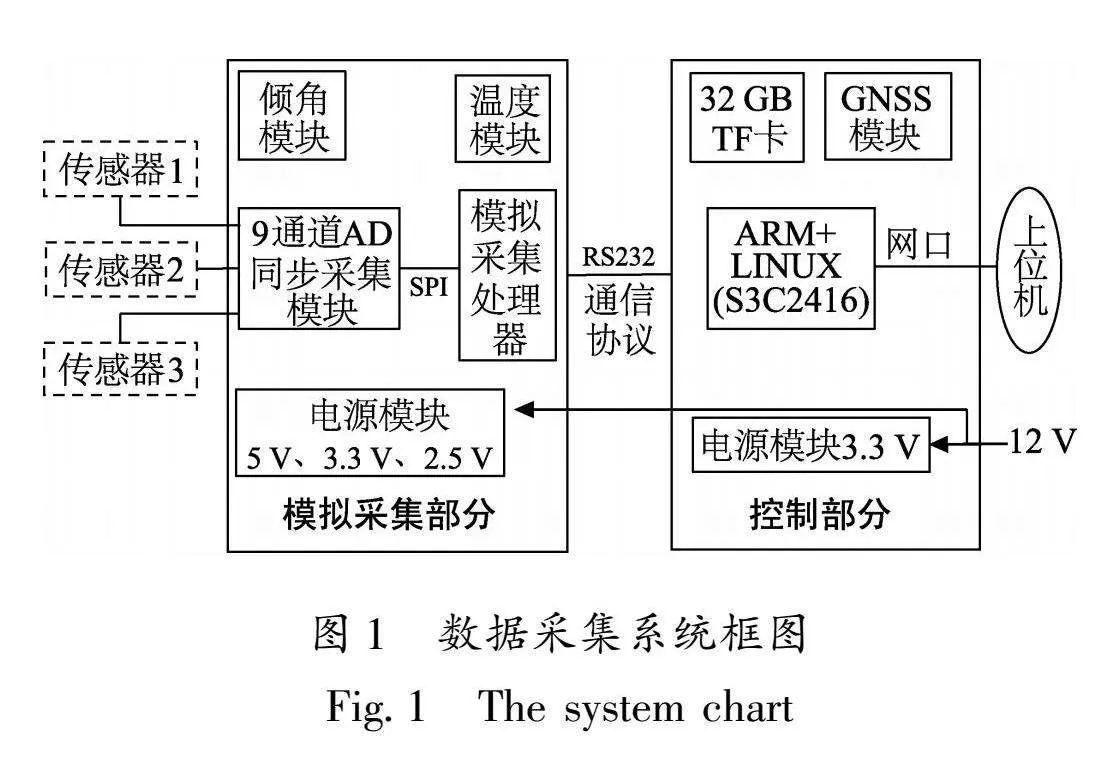
本系统包括模拟采集部分和控制部分。系统框图如图1所示。模拟采集部分需要实现的功能有:将3个三分量磁通门传感器的输入模拟信号连续转换为24位高分辨率的数字信号,通过SPI串口同步发送给微处理器STM32,微处理器STM32将9通道AD数据、倾角数据和温度数据打包并按照规定的通信协议发送给控制部分。控制部分需要实现的功能有:①与模拟采集部分通信,对原始采集数据进行解析、格式转换、整理等得到最终的数据结果,并进行本地存储管理;②实现远程FTP存储数据下载和传输等;③为系统的实时时钟提供时钟驱动,并完成GNSS的同步校时和授时功能;④本系统提供稳定、低噪声的供电电压。
2 模拟采集部分
2.1 电源模块
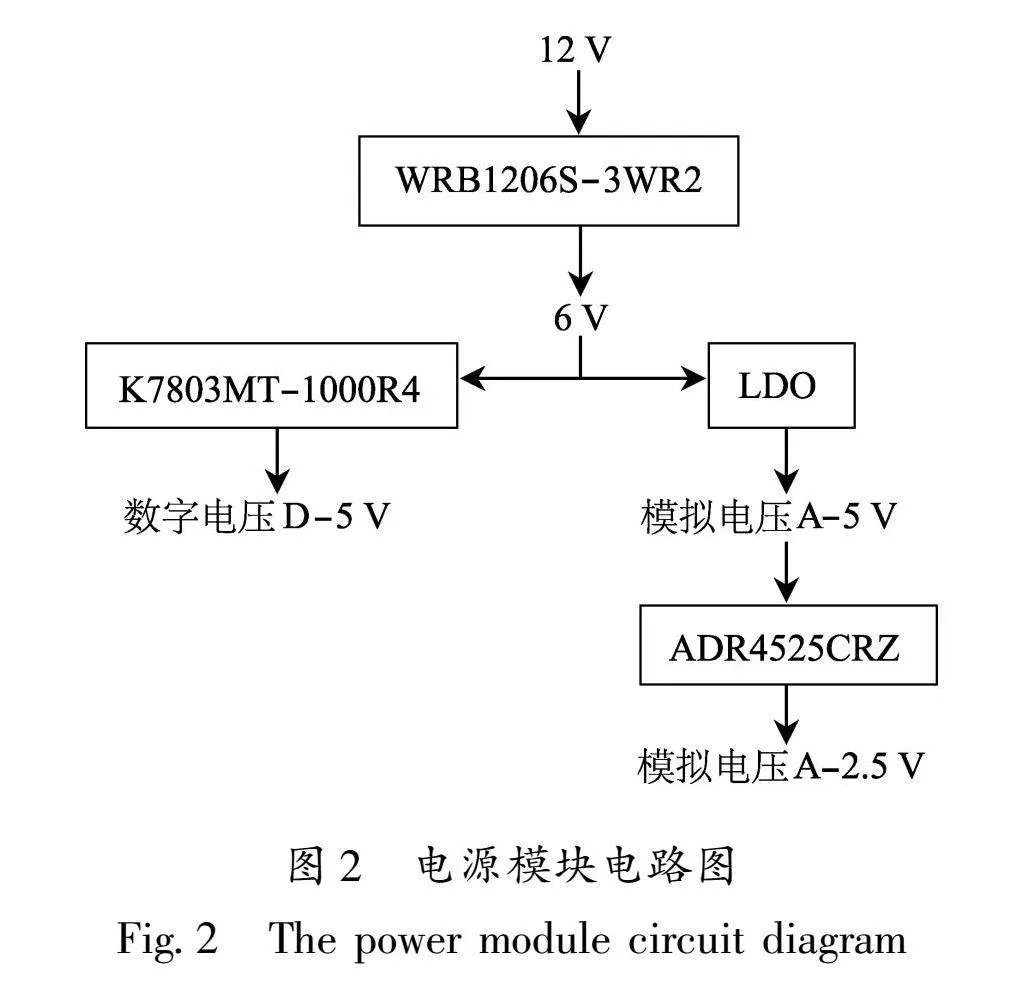
模拟采集部分的电压由控制部分提供,输入电压为12 V左右,首先经过稳压芯片WRB1206S-3WR2降为6 V,其体积小、效率高,拥有可持续短路保护功能,电源模块电路图如图2所示。由图2可见,输入电压又可分为两路,一路经功耗较低的稳压芯片K7803MT-1000R4转为5 V供给模拟采集电路板中的数字部分,另一路经低压差线性稳压器LDO转为5 V后又经高精度低温漂低噪声电压源ADR4525CRZ降低至2.5 V,供给模拟采集电路板中的模拟部分。为避免模拟芯片受到高频噪声干扰,对模拟部分和数字部分进行了隔离供电,并采用一点接地的方式。
2.2 9通道AD同步采集模块
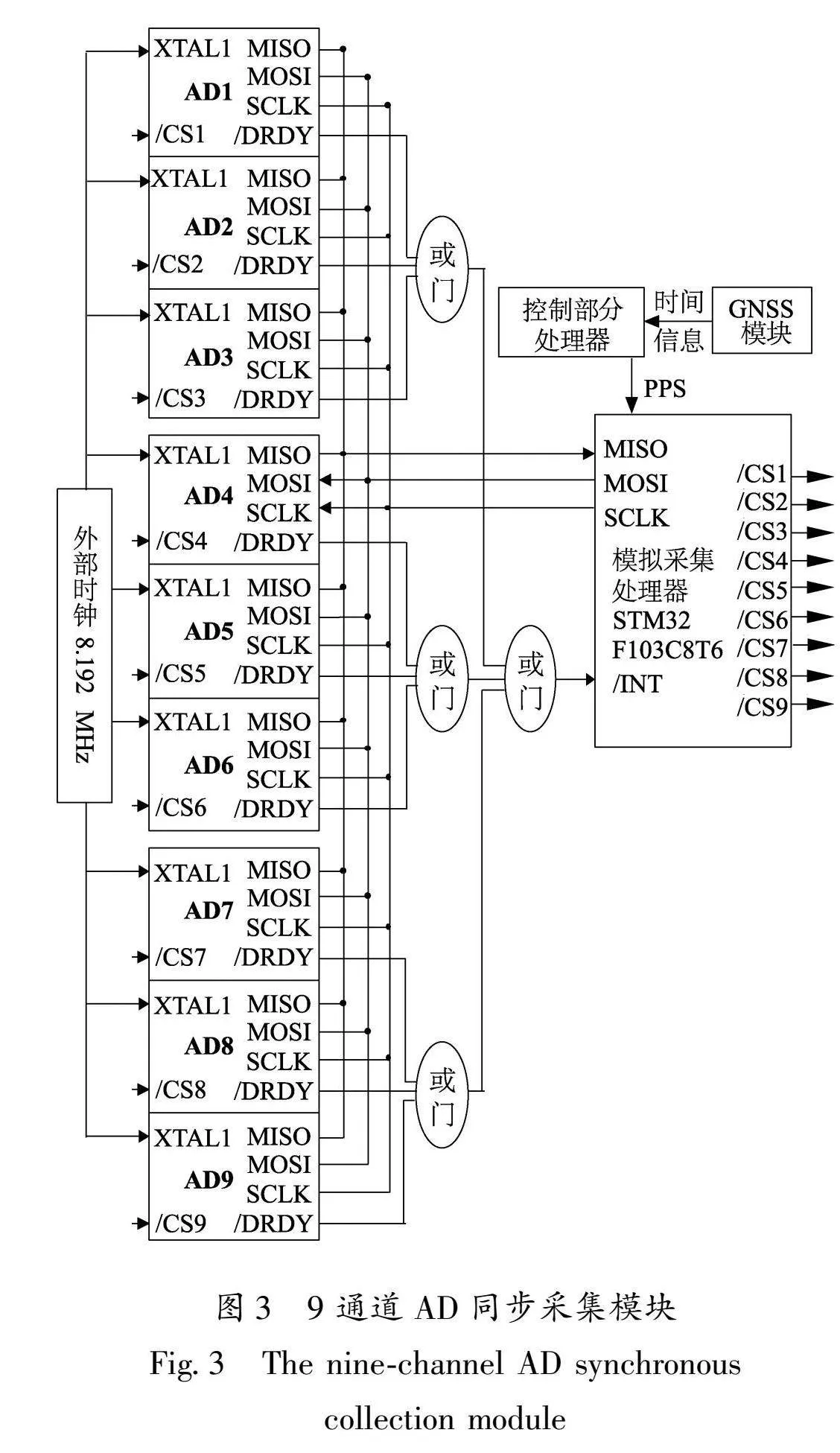
多传感器差分补偿的实现要求传感器的数据采集同步。为此,9通道AD芯片采用同一高精度外部时钟驱动,能够使得各通道的采集具有严格同步的时钟周期,模块设计如图3所示。
为满足传感器输出信号的大动态范围,本系统采用24位高精度模数转换芯片ADS1255。这是一款内带四阶ΣΔ调制器的高精度24位AD,具有可达23位无噪声分辨率、最大非线性±0.001%的优良特性,且外围电路非常简洁,有利于提高系统的可靠性和信噪比。采集部分采用低功耗单片机处理器STM32F103C8T6,其与9个模数转换芯片ADS1255之间采用SPI高速串行通讯接口,各通道AD转换完成后输出的/DRDY低电平中断信号经或门电路合并为一路,作为采集处理器读取AD转换数据的总中断信号,因而能够实现9通道AD转换数据的同步读取。
采集数据的绝对时间戳的准确性由控制部分的上位机采用GNSS校时实现。上位机接收到采集部分的实时数据后,通过读取系统RTC获得绝对时间。RTC时间由GNSS接收模块进行校时,并为保证校时精确性,系统采用GNSS模块的秒脉冲信号PPS作为校时的中断信号。
2.3 模拟采集程序设计
采集程序首先对串口等外围接口及外设进行初始化,配置中断优先级、设置采集参数等。采集部分控制器收到采集中断信号后,进入中断服务函数,读取转换结果。
模拟采集和控制部分之间采用串口通信,为保证传输数据的完整性,设计通信协议为4 Byte帧头+48 Byte有效数据+4 Byte帧尾,数据的接收和发送均按照通信协议进行,如图4所示。
3 控制部分
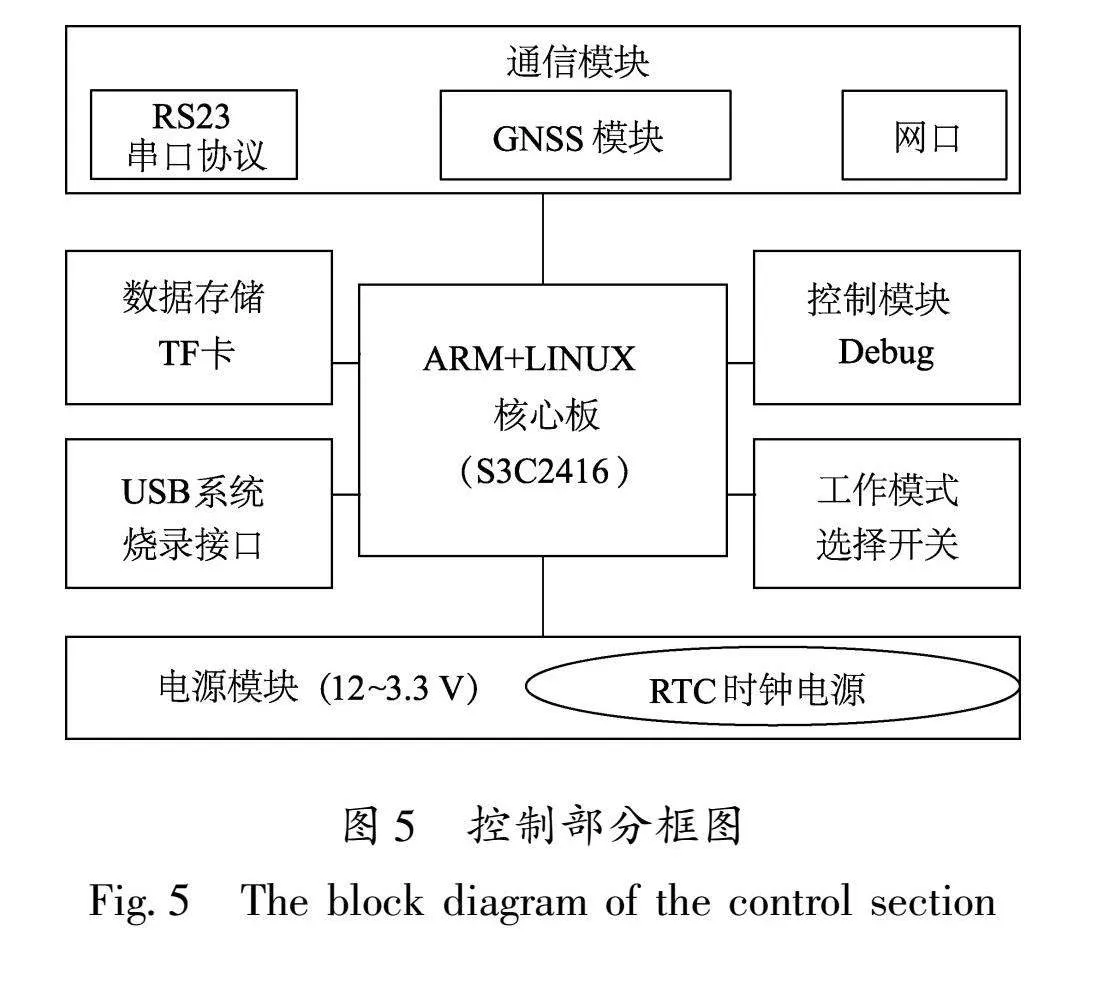
为满足控制部分对系统的软、硬件要求,采用低功耗高性能的32位嵌入式ARM处理器S3C2416作为主控制器,以裁剪后的嵌入式LINUX操作系统作为程序运行平台。采用RS232串口与模拟采集部分进行通信,外接32 GB存储卡作为采集数据存储器;采用10/100 M自适应网卡作为对外传输通信,并用以查询和设置采集器参数,如图5所示。
数据存储模块采用容量为32 GB的TF卡,其体积小、容量大、存取速度快。在9通道50 Hz采样时,可存储大约5个月的连续采集数据。控制器采用SDIO(安全数字输入、输出)接口连接TF卡。
GNSS模块采用灵敏度高、体积小、功耗低的NEO-6M芯片,其内置NMEA-0183标准协议。NMEA-0183协议是为了在不同的GNSS导航设备中建立统一的RTCM标准。该协议定义了多种命令,最常用的6种命令分别为$GPGGA、$GPGLL、$GPGSA、$GPGSV、$GPRMC和$GPVTG,其中$GPRMC包含了最小定位信息,如时间、经纬度等,满足本采集系统校时和定位的设计需求,因此本模块仅解析该命令。
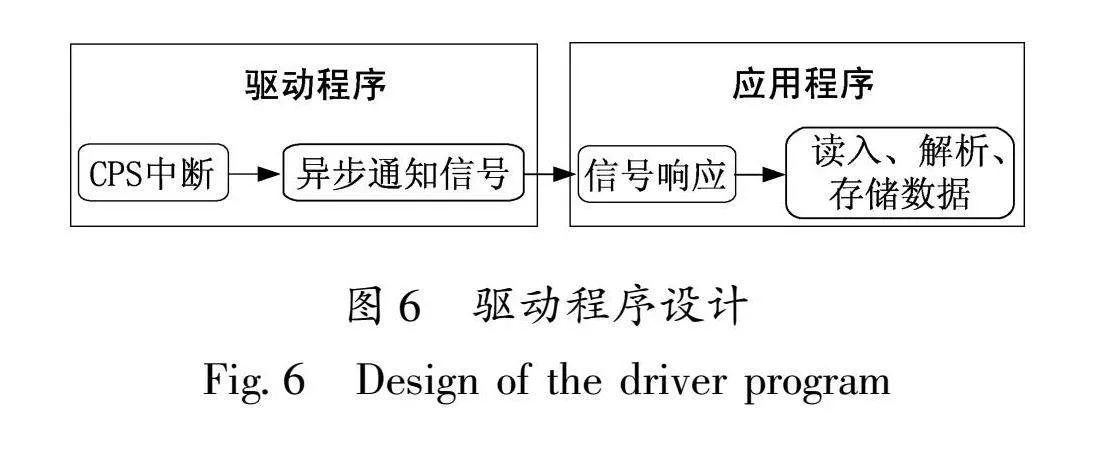
控制部分程序基于LINUX系统设计,分为应用层和驱动层。驱动层通过响应硬件中断,实现实时处理。应用层主要负责数据的接收和处理,并响应各类控制命令,实现人机接口。
驱动程序设计如图6所示。设备驱动程序响应硬件请求,是内核与硬件之间的接口。为使采集数据有精确的采样时刻,采集系统在驱动程序中通过中断方式响应来自GNSS模块的秒脉冲(Pulse Per Second,PPS)信号,并通过SIGNAL信号机制通知应用程序。
应用程序完成数据采集、数据校时、数据存储、数据处理和网络传输通讯等任务,主要有实时数据接收模块、GNSS高精度时间服务模块、本地数据存储模块、远程数据服务模块,如图7所示。为了实现多任务的“并行”处理,应用程序采用多线程设计。在采集器应用程序设计中,以全局数组变量作为公共的数据缓冲池,并创建4个处理线程:线程1是程序主线程,循环监控网络连接请求。当有远程用户试图连接时,主线程创建一个新的线程去处理,然后继续进行循坏监控;线程2用于与下位机通信获取采集数据,同时处理GNSS秒响应信号,为采集数据标上精确时间戳;线程3用于数据的本地存储管理,根据采集器的设置要求按每小时的时间长度保存为连续数据文件,并监控存储空间容量变化情况,根据设置是否要删除过期数据文件等处理;线程4对采集的原始数据进行解析处理,如数据格式转换等。
4 性能指标测试
4.1 线性度误差测量
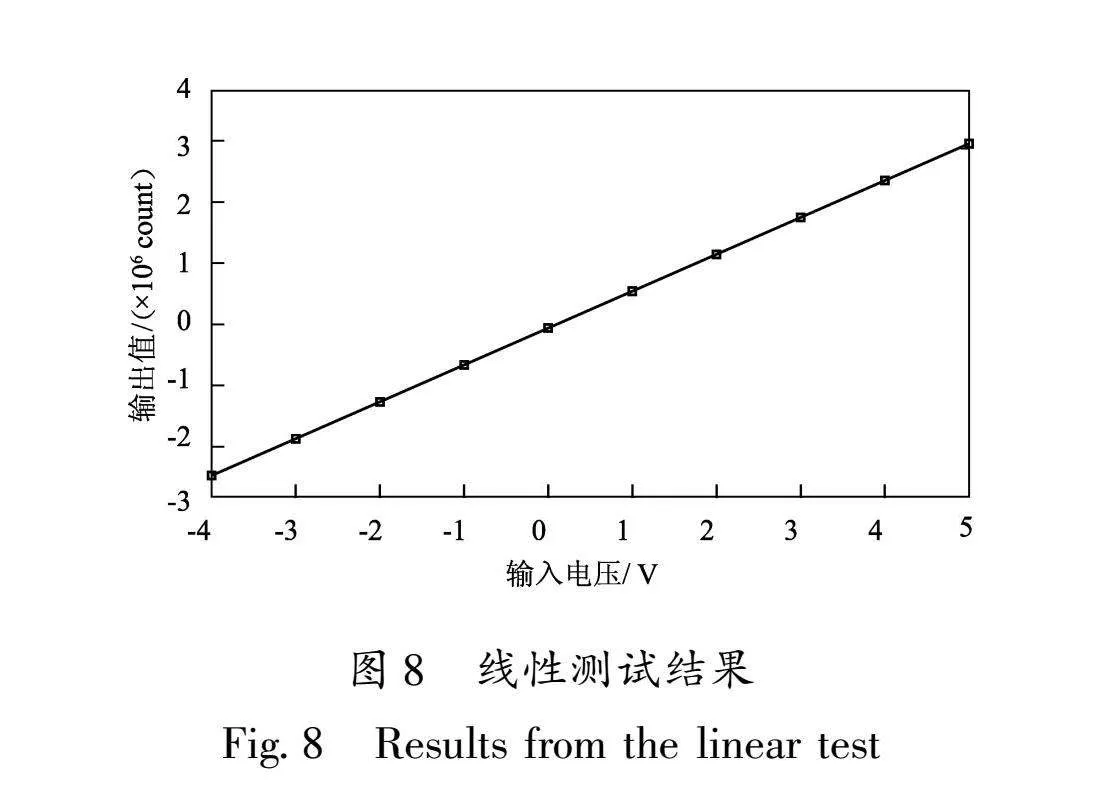
设置该数据采集系统采样率为50 SPS,使用高精度直流电源输出直流电压信号,测试信号幅度分别选择为-5 V、-4 V、-3 V、-2 V、-1 V、0 V、1 V、2 V、3 V、4 V、5 V,每个测试点记录30 s长的数据,线性测试数据记录见表1。由最小二乘法(地震观测仪器进网技术要求地震烈度仪,DB/T 59—2015)计算得到线性度误差为5.56×10-6,线性测试结果如图8所示。
4.2 幅频特性测试
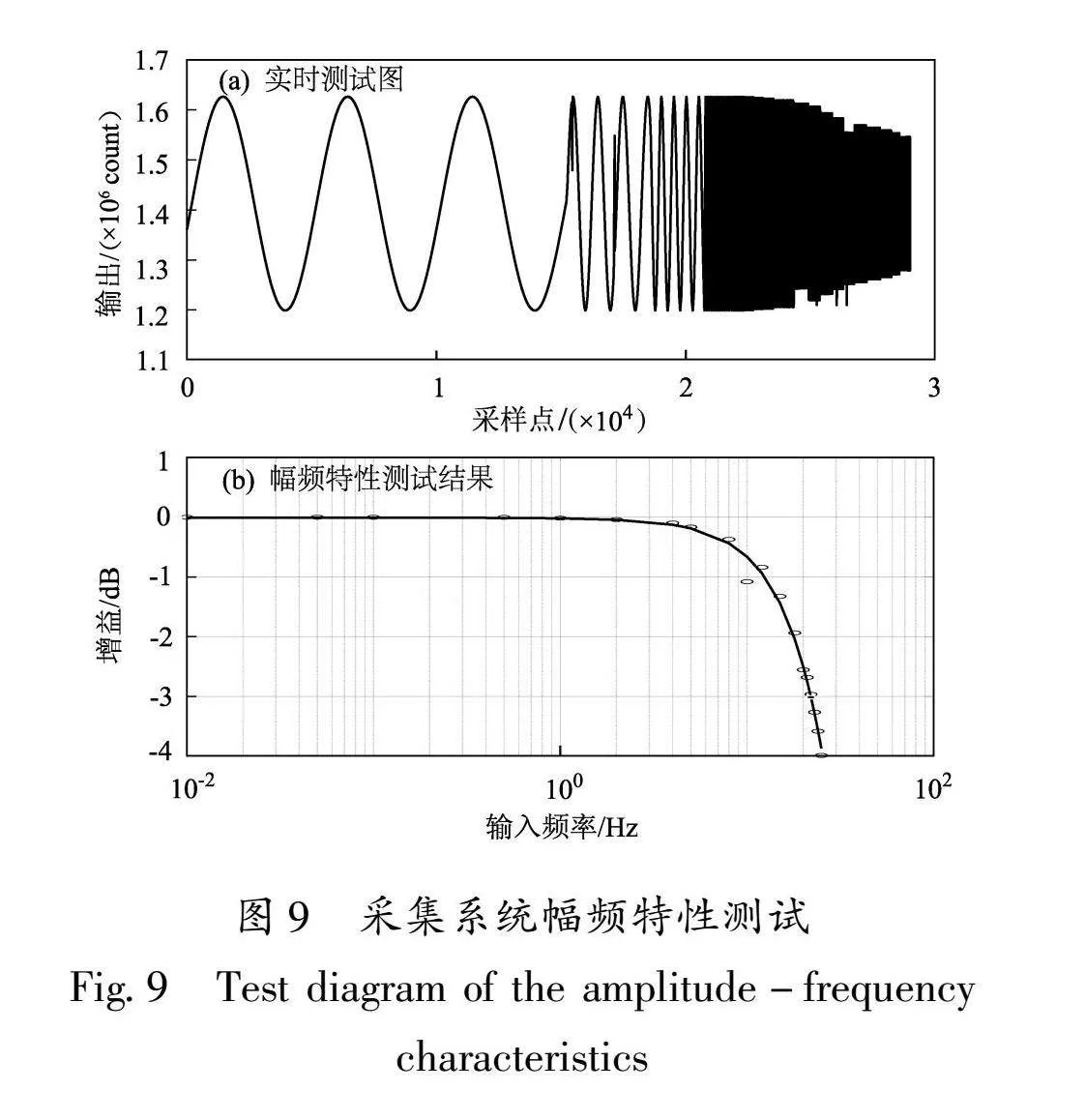
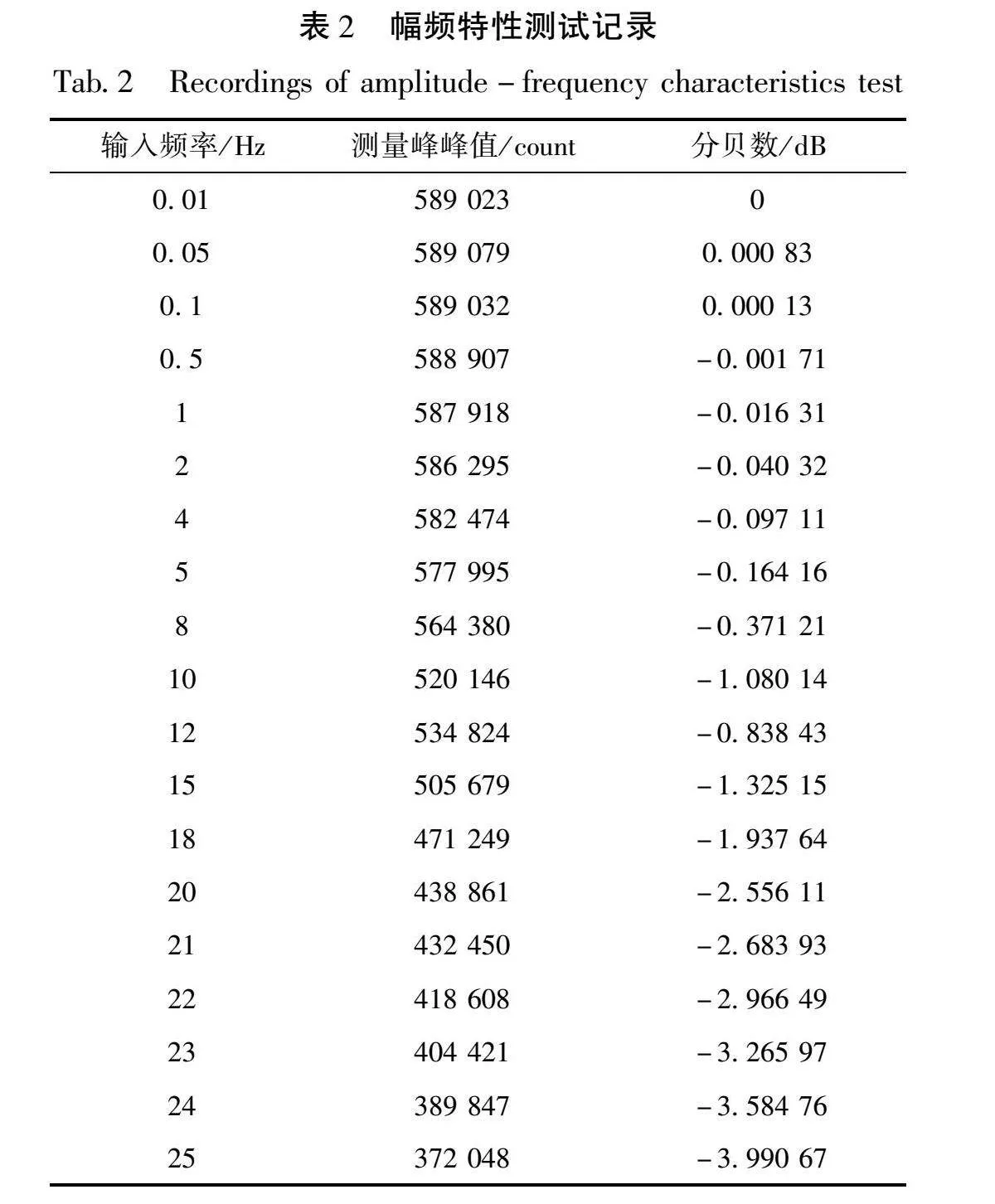
采用信号发生器输出正弦信号作为采集系统的测试信号。测试时,使输入正弦测试信号幅值保持2 V(峰值)不变,输入频率为0.01~25 Hz,采集系统采样率为50 SPS,记录采集系统的输出并通过快速傅里叶变换计算响应信号幅值。以0.01 Hz时的输出信号幅度作为参考,输出信号幅值降至0.707倍即-3 dB时的输入信号频率即为该采集系统的响应截止频率。幅频特性测试记录见表2,表中分贝数计算如下:
dB=20×lg(Ni/N0)(1)
式中:Ni为测量值,i= 0、1、2……24。
幅频特性测试结果如图9所示,结合图中数据可以看出,频带范围为DC~22 Hz。
4.3 连接磁通门磁力仪测试
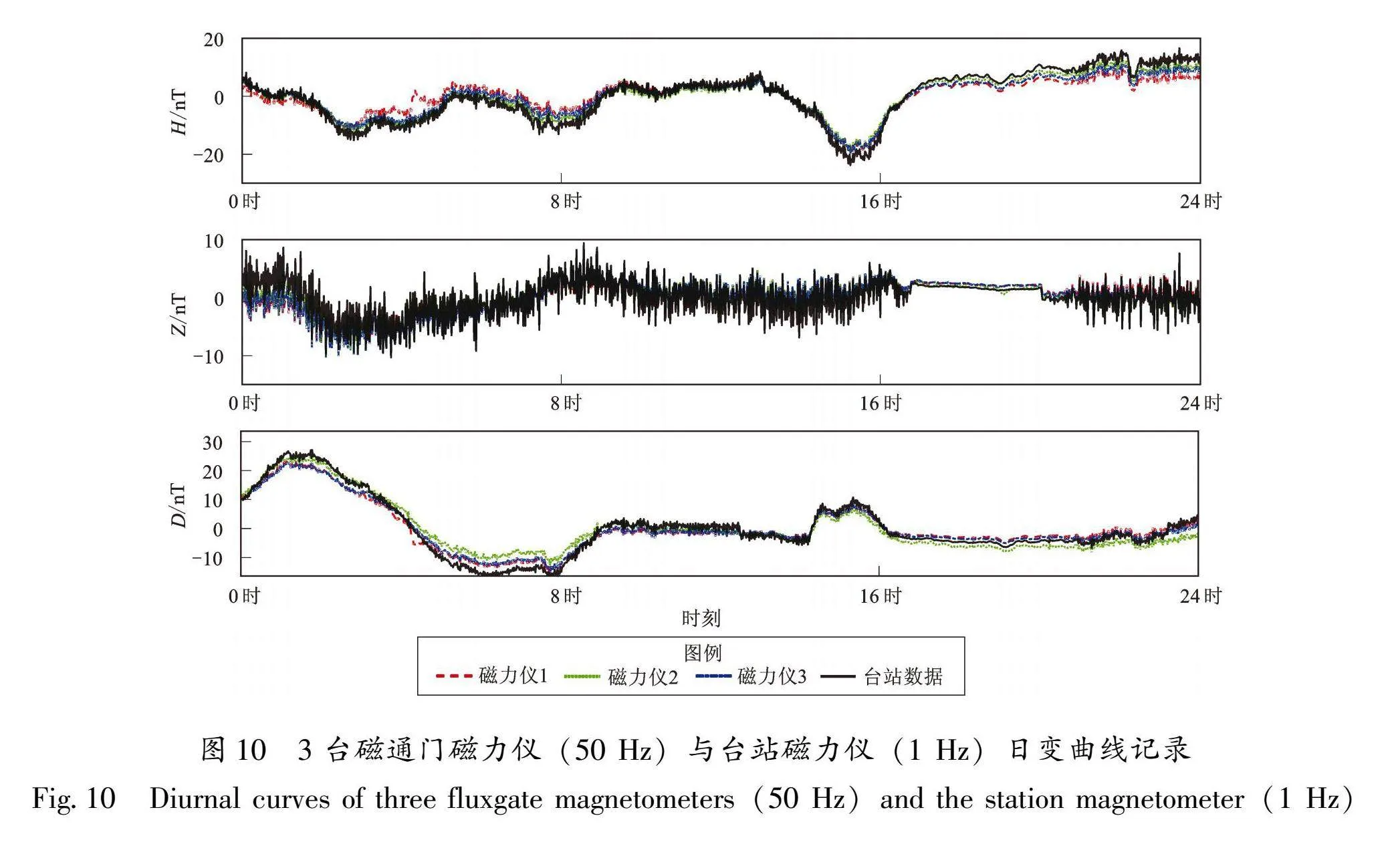
在北京国家地球观象台的地磁观测室内进行数采连接磁通门磁力仪的观测实验。在数采的输
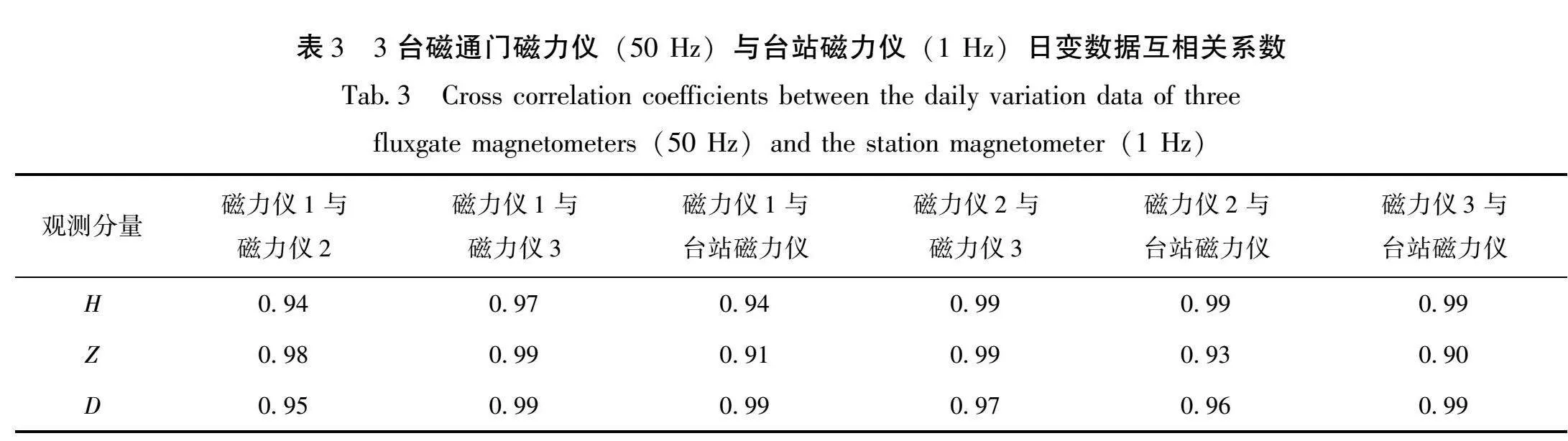
入端接入3台磁通门磁力仪,等待磁通门磁力仪运行稳定后,选取一天的测试数据(时间为国际标准时)与台站仪器记录的数据进行对比分析,数采所记录的3台磁通门磁力仪测试数据与台站磁力仪观测数据经去平均值后其日变曲线如图10所示。从图中可以看出,3台测试仪器与台站仪器记录到的磁日变曲线大致重合。引入皮尔逊互相关系数进一步分析测试数据的一致性,皮尔逊法则是一种经典的相关系数计算方法,主要用于表征线性相关性能,皮尔逊相关系数为-1~1,绝对值越接近于1,则表明两个变量的相关程度越高(刘若男等,2022)。因此,该方法常用于比较地磁矢量观测数据的一致性(刘成等,2019;周思远等,2023)。3台磁力仪测试数据与台站磁力仪观测数据的皮尔逊互相关系数分析见表3,从表中可以看出,3台测试仪器之间以及3台测试仪器与台站仪器之间的数据互相关系数均为0.9以上,表明其一致性较高。
4.4 功耗测试
控制部分单独工作时,功耗为1.3 W。连接上模拟采集部分,等待整个采集系统稳定之后测得的功耗为4.5 W。
5 讨论
基于嵌入式技术设计的多通道数据采集系统,采用模拟采集和控制部分分体式的设计,模拟采集电路板大小为18 cm×11 cm,控制部分电路板大小为11 cm×8 cm,较小的尺寸使得其在空间有限的无人机上的安装和固定更具灵活性,并可以使易受干扰的传感器精密模拟信号处理系统远离噪声较大的数字系统。整个系统稳定工作后的功耗仅为4.5 W,较低的功耗可以提高采集效率,延长续航时间。对于地面地磁观测,1 SPS的采样率已能满足观测准静态地磁场的要求。对于航磁,为了获得较高的空间分辨率则需要提高采样率。在不高于100 km/h的航速时,采用50 SPS的采样率能实现每米距离得到1个采样点的精度。幅频特性测试结果表明频带满足采样率的要求。较高采样率对于通道间的同步提出了更高的要求。本文对模拟采集部分的9个AD芯片使用同一外部时钟驱动,其采集信号经或门电路合为一路作为中断信号,使处理器可以同步采集9个AD芯片的数据,保证了通道间数据具有高精度的相对同步。控制部分的GNSS模块为整个系统提供时间信息和PPS秒信号,从而保证本地时钟具有高精度绝对准确性。从静态测试结果来看,该数据采集系统能够满足多通道航磁测量的需求。但是在飞行情况下,该系统的采样精度、稳定性等是否会受影响,无人机自身以及环境的磁干扰是否会降低采集质量等问题都需要开展无人机动态测试验证,但因北京地区飞控管制以及无人机设备借用不便等问题,机载动态测试目前尚未进行。此外,动态测试需要选择机身材料磁屏蔽能力较高、续航时间长、可控性较强的无人机,在磁干扰较小的环境内以重复路线多次飞行的方式对系统的噪声、稳定性等进行测试。
6 结论
本文针对多传感器磁测系统,研制了一套可适用于无人机的多通道航磁同步数据采集系统,该系统基于嵌入式LINUX系统,提供具有高精度的本地时钟,并通过同一高精度外部时钟驱动9通道AD同步采集模块,设置系统采样率为50 Hz以提高采集精度。对该系统进行测试,主要得到以下结论:
(1)该数据采集系统体积小、质量轻、功耗低,适用于无人机。
(2)该系统在50 SPS的采样率下,线性度误差为5.56×10-6,-3 dB频带范围为DC~22 Hz,满足航磁的高分辨率采集需求。
(3)3个磁力仪之间以及3个磁力仪与台站比对仪器之间的采集数据一致性良好,表明该数据采集系统各通道之间的同步性较好、数据质量较高。
参考文献:
崔志强,胥值礼,李军峰,等.2016.无人机航空物探技术研发应用现状与展望[J].物探化探计算技术,38(6):740-745.Cui Z Q,Xu Z L,Li J F,et al.2016.The Ramp;D application of UAV airborne geophysical survey and its development trend[J].Computing Techniques for Geophysical and Geochemical Exploration,38(6):740-745.(in Chinese)
杜俊岐.2021.旋翼无人机航磁三分量数据采集及收录系统研制[D].长春:吉林大学.Du J Q.2021.Research on data acquisition system of aeromagnetic three component based on rotor UAV[D].Changchun:Jilin University.(in Chinese)
高全明.2020.固定翼无人机航磁三分量系统误差校正与干扰补偿技术研究[D].长春:吉林大学.Gao Q M.2020.Research on data acquisition system of aeromagnetic three-component based on rotor UAV[D].Changchun:Jilin University.(in Chinese)
郭华,王明,姚雨晹,等.2022.彩虹-4无人机航磁三分量测量系统研发及应用研究[J].地球物理学报,65(11):4485-4494.Guo H,Wang M,Yao Y Y,et al.2022.Research and application of aeromagnetic three-component detection system for CH-4 UAV[J].Chinese Journal of Geophysics,65(11):4485-4494.(in Chinese)
刘成,滕云田,王晓美,等.2019.基于遗传算法的磁通门磁力仪观测数据一致性校正[J].地球物理学进展,34(2):751-756.Liu C,Teng Y T,Wang X M,et al.2019.Consistency correction for the observed data of fluxgate magnetometer based on genetic algorithms[J].Progress in Geophysics,34(2):751-756.(in Chinese)
刘若男,辛义忠,李岩.2022.基于皮尔逊相关系数的动态签名验证方法[J].仪器仪表报,43(7):279-287.Liu R N,Xin Y Z,Li Y.2022.Dynamic signature verification method based on Pearson correlation coefficient[J].Chinese Journal of Scientific Instrument,43(7):279-287.(in Chinese)
倪晓寅,洪旭瑜.2022.华南地区地磁预测方法预测指标体系的初步应用[J].华南地震,42(4):60-66.Ni X Y,Hong X Y.2022.Preliminary application of prediction index system of geomagnetic prediction method in South China[J].South China Journal Seismology,42(4):60-66.(in Chinese)
王猛,刘媛媛,王大勇,等.2022.无人机航磁测量在荒漠戈壁地区的应用效果分析[J].物探与化探,46(1):206-213.Wang M,Liu Y Y,Wang D Y,et al.2022.Application effect analysis of UAV aeromagnetic survey technology in desert and semidesert regions[J].Geophysical amp; Geochemical Exploration,46(1):206-213.(in Chinese)
翟世龙,黄静,雷晴,等.2024.CGGM全球地磁场模型和新疆地区台站主磁场逐月变化的一致性分析[J].地震研究,47(2):253-262. Zhai S L,Huang J,Lei Q,et al.Consistency analysis of the monthly variation of the main magnetic field by the global geomagnetic field model and by the geomagnetic station in Xinjiang area[J].Journal of Seismological Research,47(2):253-262.(in Chinese)
张永旺,赵晗,袁宏伟,等.2022.无人机低航空磁测与地面磁测应用效果对比研究[J].西部资源,(3):188-190.Zhang Y W,Zhao H,Yuan H W,et al.2022.Comparative study on the application effect of UAV low airborne magnetic survey and ground magnetic survey[J].Western Resources,(3):188-190.(in Chinese)
赵琳,杜爱民,乔东海,等.2018.火星车磁通门磁强计技术[J].深空探测学报,5(5):472-477.Zhao L,Du A M,Qiao D H,et al.2018.The rover fluxgate magnetometer[J].Journal of Deep Space Exploration,5(5):472-477.(in Chinese)
周普志,汤民强,刘迪仁,等.2022.新型国产无人机航磁系统的应用研究[J].海洋测绘,42(1):30-35.Zhou P Z,Tang M Q,Liu D R,et al.2022.Application research of new domestic UAV aeromagnetic system[J].Hydrographic Surveying and Charting,42(1):30-35.(in Chinese)
周思远,段颖,尤伟,等.2023.地磁三分量测量中磁偏角仪器差的改正问题[J].华南地震,43(2):97-103.Zhou S Y,Duan Y,You W,et al.2023.Correction calculation on instrument difference of magnetic declination in geomagnetic three-component measurement[J].South China Journal of Seismology,43(2):97-103.(in Chinese)
朱学军.2014.无人机航磁测量中载体干扰磁场补偿方法研究[D].长沙:国防科学技术大学.Zhu X J.2014.Study on the compensation method of vehicle interferential magnetic field in UAV aeromagnetic survey[D].Changsha:National University of Defense Technology.(in Chinese)
DB/T 59—2015,地震观测仪器进网技术要求 地震烈度仪[S].DB/T 59—2015,Technical requirements of instruments in network for earthquake monitoring—Seismic intensity instrument[S].(in Chinese)
Funaki M,Higashino S,Sakanaka S,et al.2014.Small unmanned aerial vehicles for aeromagnetic surveys and their flights in the South Shetland Islands,Antarctica[J].Polar Science,7(1):1873-9652.
Development of the Multi-channel AeromagneticSynchronous Data Acquisition System
CHEN Zhuolin1,HU Xingxing1,TENG Yuntian1,LIU Gaochuan2,SHEN Xiaoyu3,CAO Yujia1
(1.Institute of Geophysics,China Earthquake Administration,Beijing 100081,China)
(2.China Earthquake Networks Center,Beijing 100045,China)
(3.Suzhou Institute of Industrial Technology,Suzhou 21500,Jiangsu,China)
Abstract
A multi-channel synchronous data acquisition system with small volume and low power consumption was developed for the UAV multi-sensor vector magnetic measurement compensation system.It adopted a separate design of analog acquisition and control parts,which effectively improved flexibility of installation in limited space.The analog acquisition part was based on STM32 processor STM32F103C8T6,which integrated 9-channel 24-bit high-precision analog-to-digital converter ADS1255,inclination chip and temperature sensor.It can realize synchronous acquisition of 9-channel data,inclination data and temperature data of the carrier.The control part was based on the 32-bit ARM low power processor S3C2416 and embedded LINUX system,and completed the functions of real-time data acquisition,SD card storage,GNSS synchronous time calibration and network communication,and had low power consumption and small size,which can meet the specific application requirements of airborne data acquisition system.
Keywords:UAV aeromagnetics;data acquisition;multi-channel;ARM