基于机载激光雷达技术的超高压电力工程巡检研究
2024-12-31高生阳



摘" 要:该文探讨基于机载激光雷达技术的超高压电力工程巡检方法,以解决传统巡检技术在电力工程中存在的局限性。首先,对机载激光雷达技术进行全面的介绍与分析,包括其原理、优势和应用范围。其次,针对超高压电力工程巡检中存在的难点和问题,提出基于机载激光雷达技术的巡检方案,并详细阐述实施步骤和关键技术。然后,提出基于渐进形态学地面滤波的超高压输电线路点云语义分割算法。最后,通过对比实验验证该方法在超高压电力工程巡检中的有效性和可行性。结果表明,基于机载激光雷达技术的超高压电力工程巡检方法具有高精度、高效率和高安全性的特点,能够满足超高压电力工程巡检的实际需求。
关键词:机载激光雷达技术;超高压电力工程巡检;渐进形态学地面滤波;点云语义分割算法;巡检方案
中图分类号:TN958.98" " " 文献标志码:A" " " " " 文章编号:2095-2945(2024)36-0055-04
Abstract: This paper discusses an ultra-high voltage power engineering inspection method based on airborne LiDAR technology to solve the limitations of traditional inspection technology in power engineering. First of all, airborne LiDAR technology is comprehensively introduced and analyzed, including its principles, advantages and application scope. Secondly, in view of the difficulties and problems existing in the inspection of ultra-high voltage power projects, an inspection plan based on airborne LiDAR technology is proposed, and the implementation steps and key technologies are elaborated in detail. Then, a semantic segmentation algorithm for EHV transmission line point cloud based on progressive morphological ground filtering is proposed. Finally, the effectiveness and feasibility of the method in ultra-high voltage power engineering inspection are verified through comparative experiments. The results show that the ultra-high voltage power engineering inspection method based on airborne LiDAR technology has the characteristics of high accuracy, high efficiency and high security, and can meet the actual needs of ultra-high voltage power engineering inspection.
Keywords: airborne LiDAR technology; ultra-high voltage power engineering inspection; progressive morphological ground filtering; point cloud semantic segmentation algorithm; inspection scheme
超高压(Extra-high voltage, EHV)输电线路作为一种与日常生产生活密切相关的基础公共设施,是国家电力网络的重要组成部分,其安全稳定地运行对保证电力网络结构及功能的完整性意义重大。由于输电线路本身结构复杂且组件数量多,一旦出现故障,维修成本较高,且有可能影响到大片区域的生产和生活用电,造成不可估量的经济损失。常规基于人工的巡线工作存在劳动力强度大、工作条件艰苦、效率低、复巡周期长和巡检数据准确率低等问题,已经难以满足社会发展的需要[1]。随着激光雷达技术的发展,以车辆、飞机等移动工具作为载体的移动测量技术得到了广泛的应用,以点云为代表的全空间、全时域三维数据获取能力得到了显著提升。该技术还能够在复杂地形和恶劣环境下实现高效巡检,为超高压电力工程巡检工作提供了全新的解决方案。因此,合理预防线路故障历来是超高压输电线路运行维护工作的核心内容。
1" 机载激光雷达技术
机载激光雷达技术的优势在于高效、高精度、高安全性和多角度数据,将为超高压电力工程巡检工作带来全新的技术支持和方法选择。龚建宗[2]通过对超高压输电线路走廊数据进行格网化处理,计算每个格网中点云数据的分布特征,以此确定杆塔大致位置,然后进行切片分析计算杆塔中心平面坐标。王鸿飞等[3]同样先将超高压输电线路点云二维格网化,然后利用线路内点云数据的相对高度以及杆塔的分布特征设定阈值,以保留杆塔所在网格,并利用周围网格计算杆塔的水平位置。陈西强[4]利用杆塔在输电线路通道中高密度、大坡度、大高差特征,通过对数据进行规则化分析,以建立点云特征图像,然后根据杆塔在密度、坡度及高程上的特征,确定其中心位置并提取杆塔点云。
1.1" 技术原理
机载激光雷达技术是一种利用激光束对目标进行扫描和测距的先进技术。如图1所示,其原理是通过激光雷达系统发射激光束,然后利用接收器接收激光束经目标反射后返回的信号,通过计算反射信号的时间差来确定目标的距离。该技术具有高精度、快速测量、非接触等优势,可以实现对地物的三维高精度测量。机载激光雷达技术在超高压电力工程巡检中的应用范围广泛,可以对输电线路、变电站、输电通道等进行快速、精确的巡检,为电力工程的规划设计和施工提供可靠的数据支持[5]。
1.2" 技术优势
机载激光雷达技术具有许多优势,这些优势使得它在超高压电力工程巡检中具有重要的应用价值。首先,机载激光雷达技术能够实现快速、高效率的大面积巡检,大大缩短了巡检周期。其次,由于激光雷达具有非接触式测量能力,可以在保证测量精度的同时降低对工程区域的干扰和破坏,具有较高的安全性。此外,机载激光雷达技术还可以实现对地物三维信息的快速获取和大数据处理,具有高精度、高分辨率的特点,可以满足超高压电力工程巡检中对空间地物信息的高要求。另外,机载激光雷达技术还可以进行多波段、多角度的数据采集,能够获取更加全面的地理信息数据,为超高压电力工程巡检提供了更加丰富的信息基础[6]。
2" 超高压输电巡检流程
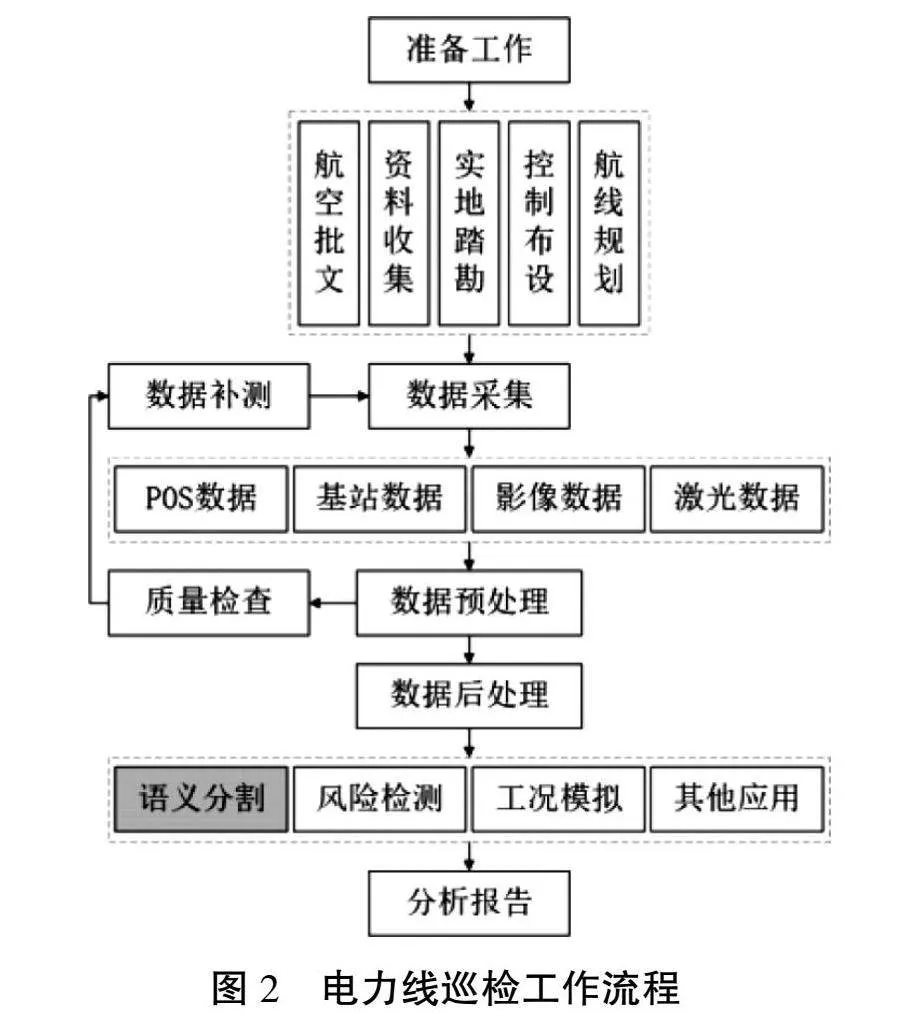
基于机载激光雷达的超高压输电线路巡检工作可分为3个部分:准备工作、外业数据采集、内业数据处理。其中,准备工作的主要任务为制定工作计划以确保作业安全;数据采集工作则是根据工作计划获取原始数据;数据处理部分可分为数据解算及数据应用。主要工作流程如图2所示。
2.1" 前期准备
由于电网巡检作业的特殊性,需要在数据采集前做好一系列准备工作,以确保作业过程中人员、设备及电网设施的安全。首先,需进行作业区踏勘工作,收集输电线路走廊中地形、气候等测区实际资料。其次,需根据测区实际情况、作业要求以及飞行平台续航情况来规划航线、制订作业计划。然后,应根据线路情况,合理布设GNSS基站地面控制点,以确保激光雷达系统定位数据解算准确。最后,为检验所获点云数据的精度,需在杆塔附近选择特征明显位置,布设地面检查点并制作点之记。
2.2" 数据采集
机载激光雷达所获点云数据的质量,高度依赖系统参数的设定、飞行平台及定位方式的选择。系统参数影响数据密度及采集范围,主要包括飞行参数及扫描参数,具体可分为飞行速度及高度、雷达扫描角度、激光发射频率。其中,飞行速度影响扫描条带宽度,飞行高度及雷达扫描角度影响扫描范围,激光发射频率影响激光脚点间隔。
2.3" 数据处理
基于机载激光雷达系统的巡检作业中数据处理工作可分为点云数据解算及数据分析2部分。点云数据解算是利用外业工作所获取原始数据(GNSS数据、IMU数据、雷达测距及测角数据、影像数据)经联合解算以获取真彩点云的过程,解算得到点云数据后,通过人工判读及滤波算法去除由于设备震动等原因产生的噪点,然后根据巡检作业任务要求对点云数据进行分析,例如,危险点检测、树木生长分析、风偏模拟、覆冰分析和工况模拟等。本文所研究的超高压输电线路点云语义分割算法是实现以上分析及应用的基础性工作。
3" 超高压输电线路点云语义分割算法
3.1" 超高压输电线路点云语义规则
在超高压输电线路点云数据处理中,基于语义规则的方法主要依靠于杆塔及电力线的空间分布特征来设定分割规则。对于杆塔数据而言,其不同于输电线路场景中其他地物的空间几何特征在于:①高程连续性,组成单个杆塔的点云数据在高程方向上是连续不间断的;②高程突变性,同一杆塔上的点云具有较大高差;③局部最高点,通常杆塔顶部点云为杆塔所在范围内的最高点;④与电力线点云相连。
基于上述特点,可以通过对超高压输电线路场景内的点云数据进行二维格网化或根据高程信息建立直方图的方式来完成杆塔位置的确定及杆塔点云数据的粗提取。对于电力线点云而言,其最显著的空间分布特征表现为2方面:①符合悬链线模型,电力线材质为柔性钢索,两端连接于杆塔绝缘子,中间受重力作用自然下垂,并且在水平投影中符合直线方程,在垂直剖面投影中符合抛物线方程;②悬空性,电力线两端连接于杆塔顶部,与地面距离较远,且与相邻电力线间隔在10 m左右,各条电力线均具有悬空性特点。
3.2" 渐进形态学地面滤波算法
渐进形态学地面滤波算法的主要流程如下。
1)对输入的离散点云建立规则格网,查询格网中最低高程点生成最小高程表面SF1,若格网内不包含点云,则利用最近邻点插值方法为其赋值。
2)利用初始窗口尺寸W1及最小高程表面SF1进行第一次形态学滤波,即开操作,在开操作结束后,计算每个点与最小高程表面的高差dhp,1,若dhp,1大于高差阈值dhT,k,则该点归为非地面,否则,归为地面点。
3)利用公式(1)、(2)及公式(3)计算新的窗口尺寸Wk及高差阈值dhT,k,对新的SFk进行下一次迭代,直到窗口尺寸达到设定阈值。
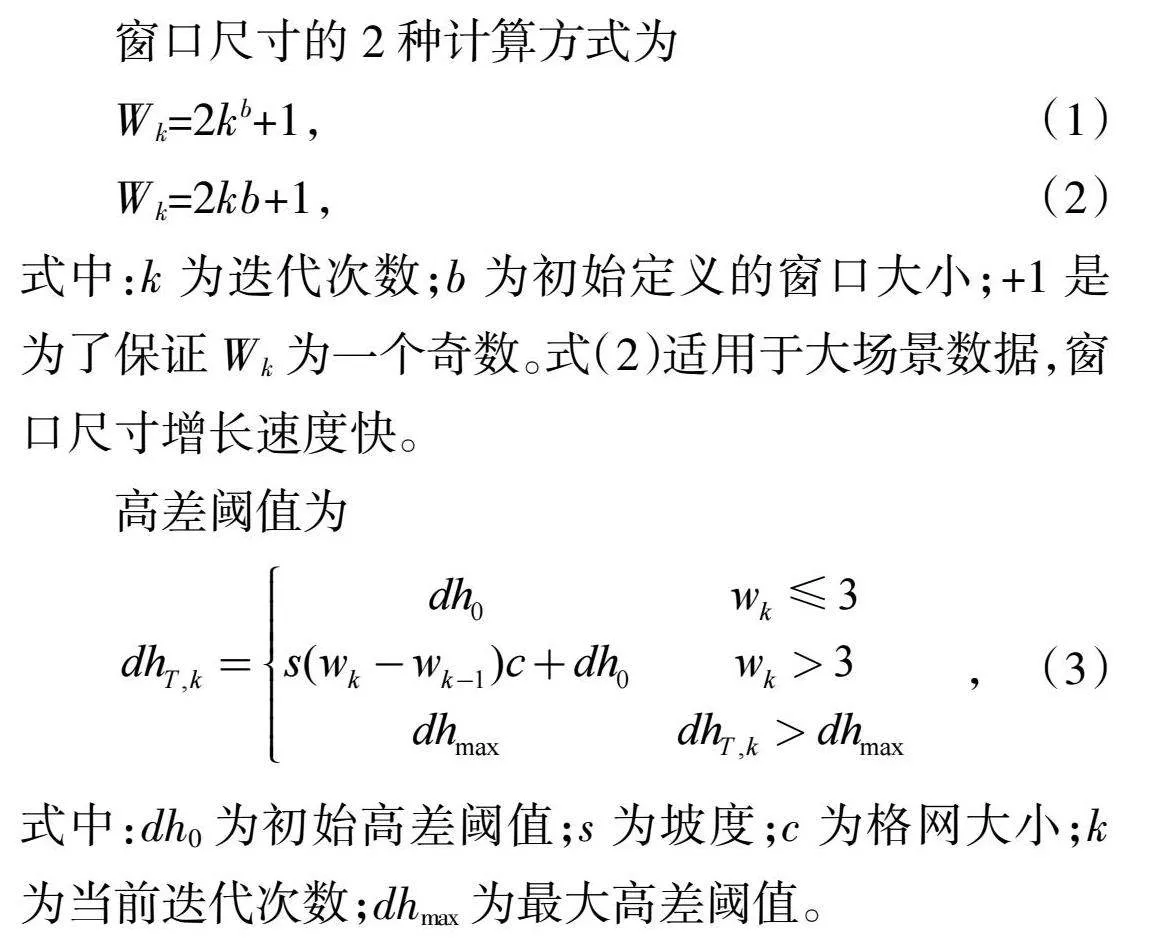
窗口尺寸的2种计算方式为
Wk=2kb+1, (1)
Wk=2kb+1, (2)
式中:k为迭代次数;b为初始定义的窗口大小;+1是为了保证Wk为一个奇数。式(2)适用于大场景数据,窗口尺寸增长速度快。
高差阈值为
式中:dh0为初始高差阈值;s为坡度;c为格网大小;k为当前迭代次数;dhmax为最大高差阈值。
4" 实验结果分析
本文所有实验均使用相同硬件配置的工作站,计算机操作系统为Ubuntu 18.04,CPU型号为Intel@Xeon(R)Silver 4114,内存为48 GB,显卡型号为NVIDIA Quadro RTX 4000,显存为8 GB。本实验使用C++语言,结合专门用于处理点云数据的PCL(Point Cloud Library)库、las文件读写库LASlib以及矩阵运算库Eigen进行了算法流程的实现。
4.1" 实验数据
实验数据为某地实测500 kV超高压输电线路点云数据,如图3所示,该数据由无人直升机搭载Reigl VUX-1HA激光扫描仪采集而来,测区地形较为平缓,点云密度为86 pts/m2,共包含11个档间,利用手工标记的方式将其标记为杆塔、地线、导线、低压电力线、建筑物、植被和地面7个类别。同时使用该数据作为第五章深度学习模型实验的测试集。由于分割规则的限制,本实验只分析杆塔、地线及导线3个类别的分割效果。
4.2" 评价指标
点云语义分割领域常用的评价指标可分为单一类别评价指标及总体评价指标,其中单一类别评价指标包括准确率(pre)、召回率(rec)、F1-值(f1)和交并比(IoU);总体评价指标包括2类,分别是平均交并比(mIoU)、总体精度(OA)。
4.3" 实验结果及分析
从表1中可以看出,常规的基于语义规则的方法,在杆塔、地线及导线3个类别上均能达到较好的分割效果。其中,导线点在3种类别中分割效果最佳,在4种精度指标中分别可达到 96.79%、96.76%、96.77%和93.75%,其误分现象主要存在于与杆塔相接部分,部分导线点被误分为杆塔点,且连接导线与杆塔的绝缘子也部分被误分为导线点。相对于导线点,地线点分割精度稍差,其误差来源与导线点相同,同样来源于与杆塔相接部分。3种类别中,杆塔分割精度最差,其误差来源除地线与导线外,还来自塔基与地面相连部分,虽然本文在杆塔提取中利用切片分析法实现了塔基部分的提取,但仍有部分杆塔点与地面、植被点混杂在一起,难以精确分割提取。
5" 结论
基于机载激光雷达技术的超高压电力工程巡检方法在提高巡检精度、缩短巡检周期、降低巡检成本方面具有显著优势,为电力工程领域的巡检工作提供了全新的技术支持和方法选择。期望本研究能够为相关领域的学者和工程师提供借鉴和启发,推动机载激光雷达技术在电力工程领域的广泛应用和推广。
参考文献:
[1] 张林.机载激光雷达在地形测绘中的运用[J].工程技术研究,2024,9(7):98-100.
[2] 龚建宗.机载激光雷达在山区输电线路设计中的应用[J].测绘与空间地理信息,2024,47(1):170-172.
[3] 王鸿飞,谭若愚.机载激光雷达测量技术及其在桂钦高速中的应用研究[J].湖南工程学院学报(自然科学版),2023,33(4):76-80.
[4] 陈西强.无人机机载激光雷达技术在电力工程中的应用分析[J].价值工程,2023,42(34):124-126.
[5] 王明伟.无人机机载激光雷达技术在矿山三维测绘中的应用研究[J].世界有色金属,2023(21):7-9.
[6] 李艳,伍陶,屈仁飞,等.机载激光雷达技术在水电站地质灾害解译中的应用[J].成都航空职业技术学院学报,2023,39(3):58-61,65.