多异构平台动目标ESM无源多机协同定位算法
2024-12-31张泽屈重君雒俊栾前进陈梦乔


摘" 要:电子支援侦查(ESM)能够在不开启雷达等有源传感器的情况下对探测目标进行无源定位,在侦查场景中能够发挥巨大作用,然而对于复杂的地面环境,雷达等传感器的信息转瞬即逝,很难有连续的目标信息。该文针对多异构平台动目标ESM无源多机协同定位算法进行研究,通过多架机同时探测目标数据进行交叉协同定位并进行反向校验,通过仿真分析,算法准确度高、计算量小且计算时间短,能够为获取更多目标信息提供强有力的支撑。
关键词:ESM;协同定位;无源定位;多异构平台;动目标
中图分类号:V279" " " 文献标志码:A" " " " " 文章编号:2095-2945(2024)36-0013-04
Abstract: Electronic Support Reconnaissance measures(ESM) can passively locate detected targets without turning on active sensors such as radars, and can play a huge role in reconnaissance scenarios. However, in complex ground environments, information from radars and other sensors is fleeting. It is difficult to have continuous target information. This paper studies the ESM passive multi-machine collaborative positioning algorithm for moving targets on multiple heterogeneous platforms. Multiple machines simultaneously detect target data for cross-collaborative positioning and reverse verification. Through simulation analysis, the algorithm has high accuracy, small calculation amount and short calculation time, which can provide strong support for obtaining more target information.
Keywords: ESM; collaborative positioning; passive positioning; multiple heterogeneous platforms; moving targets
在空中对地面探测目标定位时,目标定位技术主要分为雷达有源定位与无源雷达定位,即使用自身雷达探测目标位置与根据多机探测到的地面目标雷达辐射协同定位判断目标位置[1]。2种定位方式由于其传感器数据的不同有不同的应用场景,雷达探测技术得到的目标信息更加全面、精准,但同时也会暴露自身位置信息,因此主要用于搜救、测绘等场景中[2];而在特殊的搜索定位场景中,ESM(Electronic Support Measure)传感器能够在不暴露自身位置信息的情况下隐蔽定位目标位置,从而在保证自身安全的同时实现对目标的精确定位[3]。
针对复杂的搜索场景中,目标数量庞大、类型众多的情况,要想实现精确定位并不能通过简单的单机定位,尤其是在目标快速移动的情况下,多机协同定位的独特优势得以显现。本文将针对复杂场景中对异构平台动目标ESM无源多机协同定位的算法进行研究,分为坐标转换、双机协同定位、多机协同定位、仿真分析4部分。
1" 坐标转换
由于ESM传感器获取到的信息为机体系的目标方位角与俯仰角,而多机协同定位是在三维空间内对传感器的探测信息进行匹配,因此,需要将各飞机平台的机体系探测信息转换为统一的地理坐标系[4]。
首先,可以通过分析目标方位角与俯仰角的生成进行逆向转换,在三维ESM传感器仿真平台中的机体坐标系下的方位角与俯仰角生成是通过地理坐标系的方位角与俯仰角及载机的姿态进行转换的,地理坐标系与机体坐标系转换的欧拉旋转矩阵C如下所示
式中:fp、fp、fp分别为地理坐标系下载机的航向角、俯仰角与横滚角。
将地理坐标系转换为机体坐标系则为
式中:g、g为地理坐标系下的目标相对于载机的俯仰角与方位角,p、p为转换后的机体坐标系下目标相对于载机的俯仰角与方位角。
因此,可以通过逆向推导得到由机体坐标系向地理坐标系转换欧拉旋转矩阵C为
式中:fg、fg、fg分别为地理坐标系下载机的航向角、俯仰角与横滚角。
计算目标相对于载机的方向余弦矩阵C为
式中:p、p为机体坐标系下目标相对于载机的俯仰角与方位角。
将欧拉旋转矩阵C与方向余弦矩阵C相乘得到完整的旋转矩阵Cg为
转换后的方位角与俯仰角则为
通过以上方法,完成了ESM传感器探测数据的转换,为后续的协同定位算法计算统一了坐标系,在载机姿态及传感器测量信息误差较小的情况下,计算过程误差影响可忽略不计,能够保障协同定位算法的准确度。
2" 双机协同定位
由于ESM探测目标为动目标,为保证协同定位结果的准确度,本文采用双机协同定位以保证在同一时刻下的探测数据能够指向同一目标的相同位置,从而避免因探测时刻不同导致的目标位置不一致造成的定位精度降低的问题。
传统的双机协同定位算法通常采用方位角交叉的三角测量法,或时差测量法等进行交叉定位,并使用跟踪滤波算法将无效的定位信息排除,以数据的不断更新对定位结果进行修正[5]。这种算法在数据量不足的情况下难以保证其结果的准确度,会出现大量的错误定位,且其算法的复杂度难以在硬件性能不足的机载端进行实时计算,因此,本文提出了基于三维空间的双机协同定位算法。在三维空间内,2架载机的方位角与俯仰角形成的2条射线交于一点时,视为探测到同一目标,如图1所示。
由于载机的位置已知,2架载机的ESM传感器信息已转换为地理系方位角、俯仰角,因此可以通过位置及角度信息得到交点的位置信息。考虑到三维计算的计算量远大于二维计算,且ESM传感器的定位精度存在误差,2条射线未必存在严格交点,如图2所示。
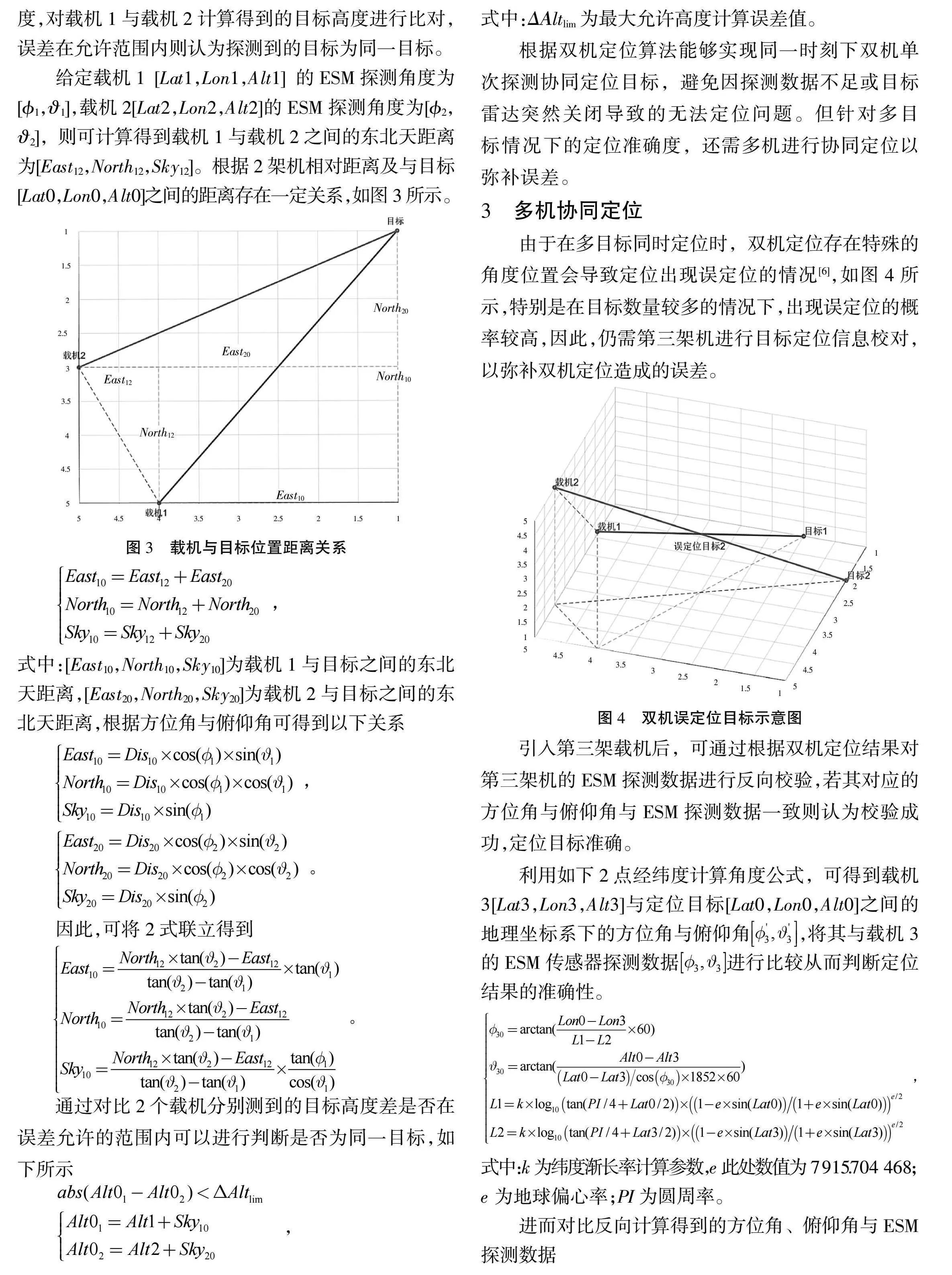
因此,需将三维射线投影到同一平面内解耦计算,通过方位角交点确定的位置计算俯仰角对应距离的高度,对载机1与载机2计算得到的目标高度进行比对,误差在允许范围内则认为探测到的目标为同一目标。
给定载机1[Lat1,Lon1,Alt1]的ESM探测角度为[1,1],载机2[Lat2,Lon2,Alt2]的ESM探测角度为[2,2],则可计算得到载机1与载机2之间的东北天距离为[East12,North12,Sky12]。根据2架机相对距离及与目标[Lat0,Lon0,Alt0]之间的距离存在一定关系,如图3所示。
式中:[East10,North10,Sky10]为载机1与目标之间的东北天距离,[East20,North20,Sky20]为载机2与目标之间的东北天距离,根据方位角与俯仰角可得到以下关系
因此,可将2式联立得到
通过对比2个载机分别测到的目标高度差是否在误差允许的范围内可以进行判断是否为同一目标,如下所示
式中:ltlim为最大允许高度计算误差值。
根据双机定位算法能够实现同一时刻下双机单次探测协同定位目标,避免因探测数据不足或目标雷达突然关闭导致的无法定位问题。但针对多目标情况下的定位准确度,还需多机进行协同定位以弥补误差。
3" 多机协同定位
由于在多目标同时定位时,双机定位存在特殊的角度位置会导致定位出现误定位的情况[6],如图4所示,特别是在目标数量较多的情况下,出现误定位的概率较高,因此,仍需第三架机进行目标定位信息校对,以弥补双机定位造成的误差。
引入第三架载机后,可通过根据双机定位结果对第三架机的ESM探测数据进行反向校验,若其对应的方位角与俯仰角与ESM探测数据一致则认为校验成功,定位目标准确。
利用如下2点经纬度计算角度公式,可得到载机3[Lat3,Lon3,Alt3]与定位目标[Lat0,Lon0,Alt0]之间的地理坐标系下的方位角与俯仰角" " ",将其与载机3的ESM传感器探测数据" " "进行比较从而判断定位结果的准确性。
式中:k为纬度渐长率计算参数,e此处数值为7 915.704" 468;
e为地球偏心率;PI为圆周率。
进而对比反向计算得到的方位角、俯仰角与ESM探测数据
式中:lim为最大允许方位角计算误差值,lim为最大允许俯仰角计算误差值。若满足以上条件,则通过载机3的反向校验,在不考虑极端情况下探测到的目标为误定位的概率极小。
4" 仿真分析
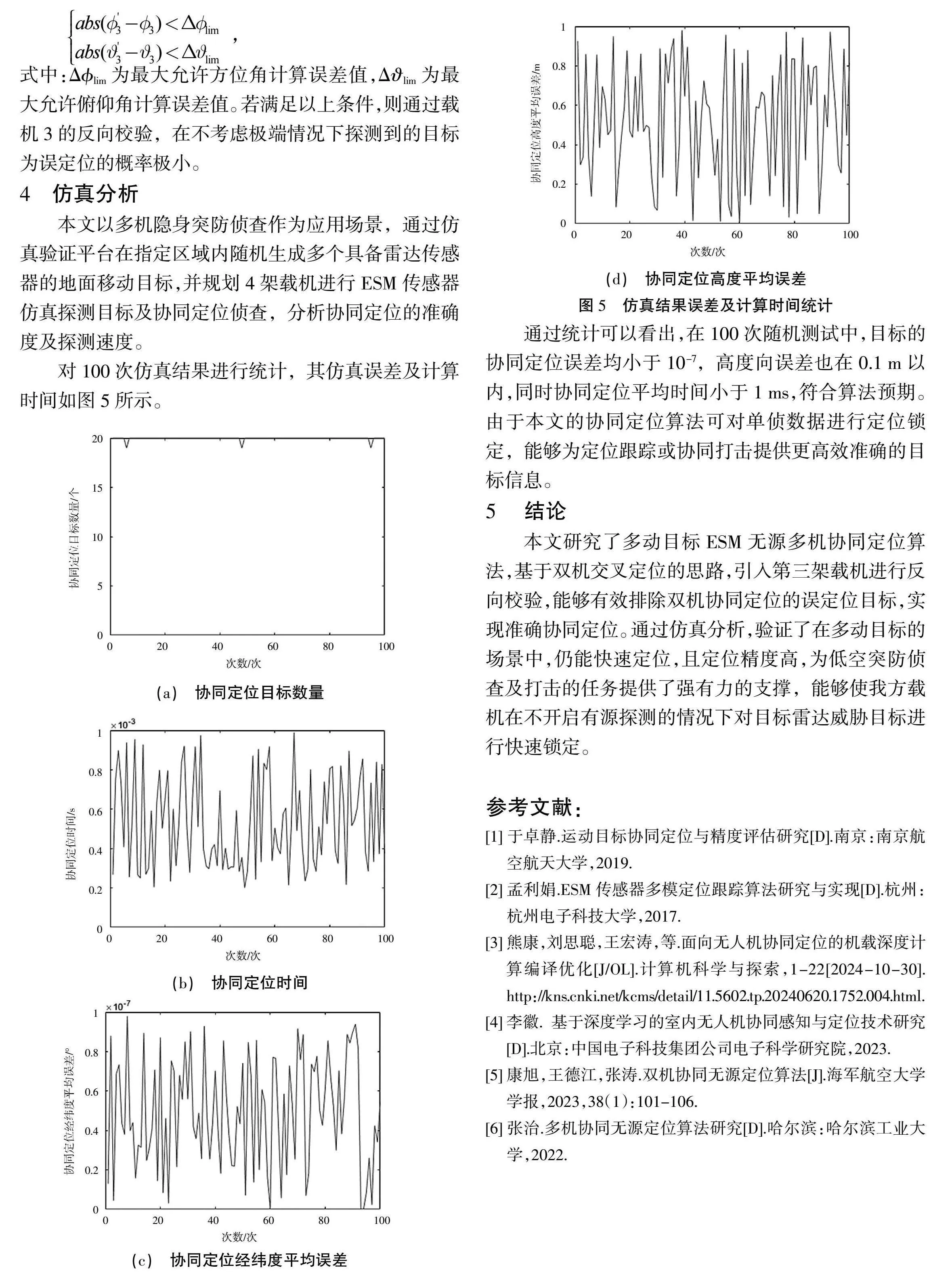
本文以多机隐身突防侦查作为应用场景,通过仿真验证平台在指定区域内随机生成多个具备雷达传感器的地面移动目标,并规划4架载机进行ESM传感器仿真探测目标及协同定位侦查,分析协同定位的准确度及探测速度。
对100次仿真结果进行统计,其仿真误差及计算时间如图5所示。
通过统计可以看出,在100次随机测试中,目标的协同定位误差均小于10-7,高度向误差也在0.1 m以内,同时协同定位平均时间小于1 ms,符合算法预期。由于本文的协同定位算法可对单侦数据进行定位锁定,能够为定位跟踪或协同打击提供更高效准确的目标信息。
5 结论
本文研究了多动目标ESM无源多机协同定位算法,基于双机交叉定位的思路,引入第三架载机进行反向校验,能够有效排除双机协同定位的误定位目标,实现准确协同定位。通过仿真分析,验证了在多动目标的场景中,仍能快速定位,且定位精度高,为低空突防侦查及打击的任务提供了强有力的支撑,能够使我方载机在不开启有源探测的情况下对目标雷达威胁目标进行快速锁定。
参考文献:
[1] 于卓静.运动目标协同定位与精度评估研究[D].南京:南京航空航天大学,2019.
[2] 孟利娟.ESM传感器多模定位跟踪算法研究与实现[D].杭州:杭州电子科技大学,2017.
[3] 熊康,刘思聪,王宏涛,等.面向无人机协同定位的机载深度计算编译优化[J/OL].计算机科学与探索,1-22[2024-10-30].http://kns.cnki.net/kcms/detail/11.5602.tp.20240620.1752.004.html.
[4] 李徽.基于深度学习的室内无人机协同感知与定位技术研究[D].北京:中国电子科技集团公司电子科学研究院,2023.
[5] 康旭,王德江,张涛.双机协同无源定位算法[J].海军航空大学学报,2023,38(1):101-106.
[6] 张治.多机协同无源定位算法研究[D].哈尔滨:哈尔滨工业大学,2022.