认识杠杆
2024-12-31喻景灿


杠杆是最简单的机械之一,人类很久以前就开始使用了,从工程建设中的撬棒到战场上的投石器,从生活中的筷子到实验室中的天平.都是杠杆.那么这种既简单又实用的机械到底有什么特点?下面我们就一起来认识它.
杠杆和杠杆的五个要素
在初中物理学中对杠杆的描述是,一根硬棒.在力的作用下能绕着固定的点O转动,这根硬棒就是杠杆,该描述中提出了物体成为杠杆的三个条件:一是要有力的作用,包括动力和阻力:二是能绕固定点转动,该固定点即为杠杆的支点:三是必须为硬棒,即不易变形的硬质材料,杠杆不一定是直的,可以是任意形状的硬棒.此外,物理学中还规定,从支点到力的作用线的距离叫作力臂,因此,杠杆的五个要素为:支点O、动力F1、阻力F2、动力臂l1、阻力臂l2.
例1 关于杠杆,下列说法正确的是( ).
A.杠杆一定是一根直的硬棒
B.杠杆的支点一定在杠杆上,且在杠杆的中间位置
C.作用在杠杆上的动力一定与阻力方向相反
D.力臂可能在杠杆上,也可能不在杠杆上
解析:杠杆的形状不是固定的,不一定是直的,例如钢丝钳、剪刀等都是杠杆,但不是直的.A错误;支点指杠杆在转动过程中固定不变的点,不一定在杠杆的中间位置,B错误;当支点位于动力和阻力同侧时,动力和阻力的方向相反,当支点位于动力和阻力之间时,动力和阻力的方向相同,C错误;力臂是支点到力的作用线的距离,有的力臂在杠杆上,有的力臂不在杠杆上.D正确.
答案:D
例2 用图1所示的开瓶器开瓶盖,A、B两点中____点是支点,开瓶盖时在C点施加____(填“向上”或“向下”)的____(填“动”或“阻”)力.
解析:杠杆绕着转动的固定点叫支点,用图1中所示的开瓶器开瓶盖时,需要手握C点向上用力扳动,开瓶器B点的铁钩将瓶盖的边沿撬起.开瓶器此时在绕着A点转动,所以A点是支点,开瓶盖时.人手在C点施加的向上的力是使杠杆转动的力,为动力.
答案:A 向上 动
力臂概念和力臂的画法
力臂是支点到力的作用线的距离.力臂的数学模型就是点到直线的距离,其中“点”为杠杆的支点,“线”是力的作用线,即通过力的作用点沿力的方向所画的直线.同学们需要注意的是.不能把力臂理解为“支点到力的作用点的长度”.作用在杠杆同一个点上的力,如果力的方向不同,那么力臂一般不同.如果力的作用线通过支点,那么这个力的力臂为零.
画力臂时.同学们应先在杠杆的示意图上确定支点,再画好动力作用线和阻力作用线,根据对力臂大致位置的预估可用虚线将力的作用线适当延长,然后从支点向力的作用线作垂线,支点到垂足间的距离就是力臂.最后在图上标出力臂对应的符号.
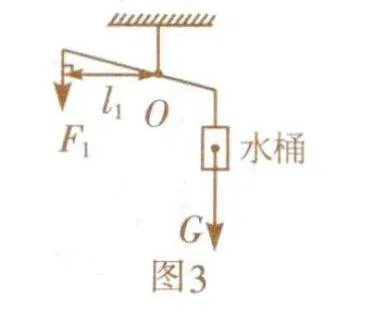
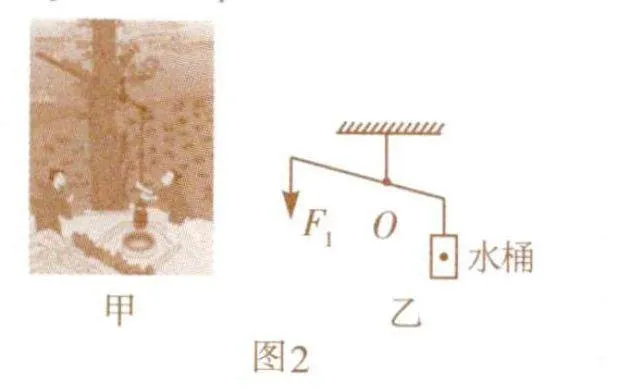
例3 (2023·衡阳)桔槔是中国古代用于灌溉或汲水的一种器具,是杠杆的一种应用,如图2甲所示.图2乙是桔槔的简化示意图,请你在图2乙中作出水桶所受重力的示意图.并画出动力F1的力臂l1.
解析:重力的方向是竖直向下的.过水桶的重心作竖直向下的重力G,过支点O作出动力作用线的垂线.支点到垂足间的距离为动力F1的力臂l1.
答案:如图3所示.
杠杆的平衡条件
在杠杆的使用过程中,杠杆的平衡状态是一种非常重要的状态,杠杆平衡是指杠杆在动力和阻力作用下处于静止状态或匀速转动状态.杠杆是否平衡是由动力、阻力、动力臂、阻力臂共同决定的,我们通过实验可得出杠杆的平衡条件是“动力×动力臂:阻力×阻力臂”,或写为F1l1=F2l2.
例4 (2023·永州,有改动)小明利用铁架台、杠杆、钩码和弹簧测力计等器材探究杠杆的平衡条件,实验使用的钩码质量均相等.杠杆上每格的长度均相等.
(1)在杠杆两侧挂上钩码,设右侧钩码对杠杆施加的力为动力F1,左侧钩码对杠杆施加的力为阻力F2,测出杠杆平衡时的动力臂l1和阻力臂l2,多次换用不同数量的钩码,并改变钩码在杠杆上的位置,使杠杆在水平位置平衡,得到的实验数据如表1所示.
分析表1中的数据,得到杠杆的平衡条件是:____.
(2)将图4甲中A、B位置的钩码都减少一个,杠杆____(填“仍然平衡”“左端下沉”或“右端下沉”).
(3)如图4乙所示,用弹簧测力计先后沿a、b两个方向拉杠杆上的同一点C,杠杆都在水平位置平衡,若弹簧测力计在a方向竖直向上的拉力为Fa,在b方向斜向上的拉力为Fb,则Fa____(填“>”“<”或“=”) Fb.
解析:(1)先将数据中的各个力与对应的力臂相乘,然后分析实验数据,可得出关系式F1l1=F2l2.( 2)设钩码所受的重力为G,每一格的长度为L,A、B位置的钩码都减少一个.则F2l2=G×3L=3GL,F1l1=2G×2L=4GL,F2l2<F1l1,所以右端下沉.(3)根据杠杆的平衡条件分析,将弹簧测力计绕C点从a方向转动到b方向的过程中,钩码所受的重力不变,其阻力臂不变,即阻力与阻力臂的乘积不变,而动力臂在这个过程中逐渐减小,则动力逐渐增大,即Fa<Fb.
答案:(1)F1l1=F2l2 (2)右端下沉 (3)<
