机器人智能小车的创新设计方案
2024-12-28王思睿田知瑀王学刚
中小学信息技术教育 2024年13期

作品构思
机器人智能小车通过光电传感器识别黑线,用于模拟智能车在城市中行驶的过程。未来,智能汽车会普及,需求量会增大,为了避免拥堵,我们设计出两个路线,一个是单数左转,一个是单数右转,但最后都汇集到同一个终点,这样能够解决造成的交通拥堵问题。
思路设计
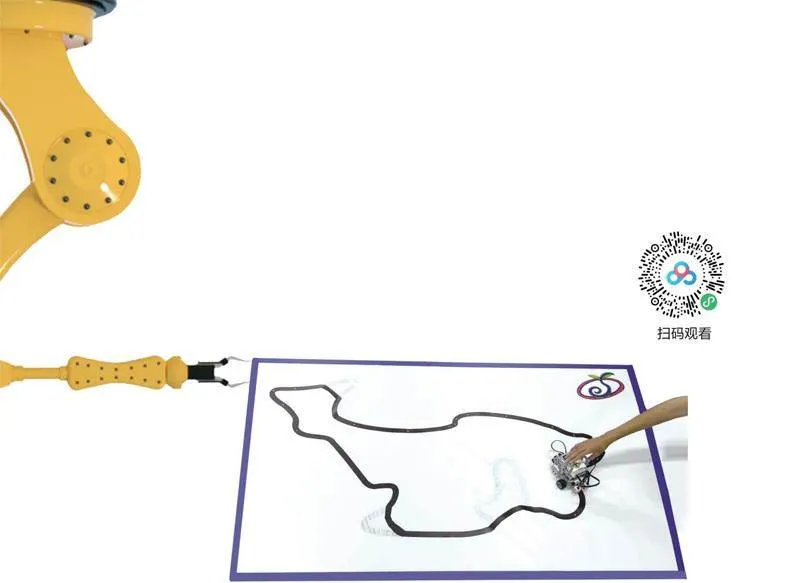
机器人智能小车沿黑色轨道行走的过程中,如果两侧光电传感器都检测到白色,说明机器人已经到了十字路口,此时程序中应该使用计数器,利用变量进行计数,并让机器人智能小车强行右转到达右侧或是左转到达左侧的黑色轨道。
地图整体的设计思想就是以“中”字来象征着中国,现在中国智能汽车行业发展迅速,大部分地区在这个领域已经kBu0VItHHdZ1m1GzpU+KmQ==形成了雏形。我们通过查阅资料,了解到智能汽车最重要的一部分就是人为规定路线来实现复杂的道路行驶。所以我们设计了一个简单的小程序来模拟智能汽车的基本原理。
接下来要展示的是超声波传感,通过发射和接收声波,产生机械振动,转换为电能,再对电信号进行放大,来控制小车运动。当机器人智能小车识别到面前的障碍后,会立刻停止行驶。
我们针对路面情况设计出以下几点任务:机器人智能小车对公共汽车站的处理;机器人智能小车对运动中物体的处理;机器人智能小车对紧急停车标志进行处理。完成各个模块的集成后,对整个项目不断调整和优化系统的性能,确保其能够稳定运行。
创新点
基于传感器的综合运用,我们设计了这款机器人智能小车,综合考虑外界环境抗干扰,稳定性好。
其功能展示可扫描右上方小程序二维码观看。