管道气动疏通机器人
2024-12-28朱子渔崔云鹤
作品构思
随着现代社会的高速发展,管道成为一种极为重要而普遍的运输方式,在石油、化工、水利、城市建设等工业部门广泛应用。这些管道为工业发展和人类生活水平的提升提供了极大的便利,然而,由于管道本身结构的特殊性以及不同管道存在环境的特殊性,使得管道的人工检修和清理成为工业生产中的一大难题。
怎么解决这些问题呢?很多事情不能人工去做,可以研制一种能够对管道进行有效检测和清理的管道机器人。一直以来管道机器人都是机器人领域一个重要分支,作为一种在管道中能自主或者半自主行走并能检测或清理管道的机电一体化设备,能够帮助人类完成人工所不能做的工作,实现对管道的检测或者清理。
制作过程
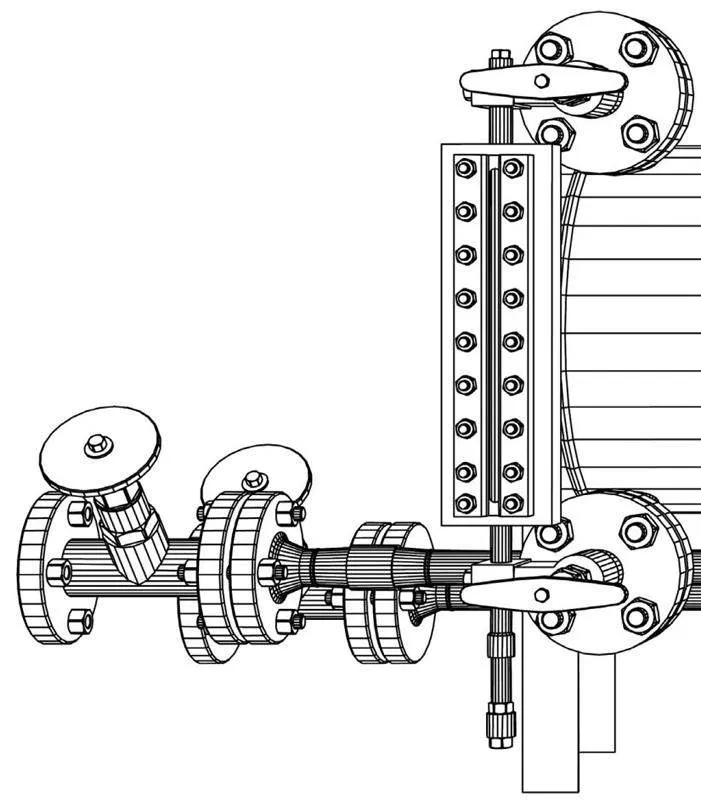
一是完成结构设计。结构设计方面遵循简单、安全、实用的原则。针对气动系统的特点和机器人的功能要求,我决定采用蠕动的运动方式进行结构设计,通过三组气缸交替动作,为机器人提供动力。
二是电路及编程。控制设计方面使用单片机,通过控制继电器和电磁阀通电,最终控制机器人的所有动作。
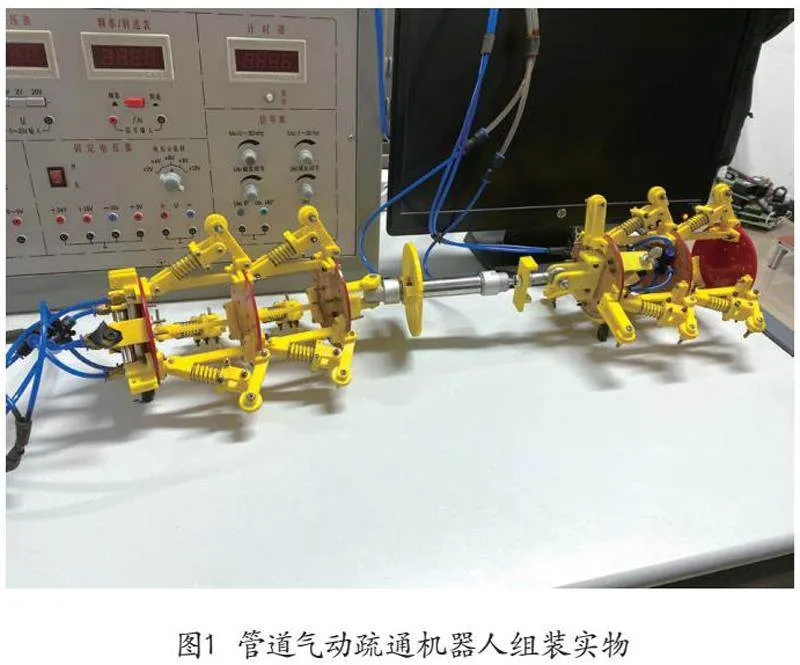
三是实物制作。我利用3Done设计零件,通过3D打印技术、亚克力板等,将零件制作出来,自行完成组装(图1)。
创新点
一是机器人的彩色零件全部自制加工完成,其中黄色零件为3D打印制作,红色支撑板由激光切割机加工而成,采用3D打印和激光技术可以快速加工出实物。
二是机器人采用气压驱动蠕动型运动方式,其零件材质和气驱方式,使机器人具有防爆的优点,适应各类油气化工管道。
三是机器人可以适应不小于90度的弯曲管道。
四是机器人有弹性,可以适应管径的微小变化,管道通过能力强。
功能展示
管道气动疏通机器人可以通过气动的原理让机器人在管道中前进、转弯,解决各种管道存在的日常维护清理、检查的不便,从而实现省时省力高效地完成对各种管道的检查和维护任务。
本作品的管道气动机器人不仅结构简单、控制方便,能够适应各种管道的要求,对工作环境有很强的适应能力,并且工作效率高。这种机器人不需开挖地面就可进行地下管道的维护和疏通、检查,这样既不影响交通,又不污染环境。希望未来可以广泛应用于工业和生活当中。