基于三维激光扫描仪的圆形横截面隧道测量规划
2024-12-17席泽焕




摘 要:为解决圆形横截面隧道几何形状的测量和规划问题,本文提出一种扫描圆形截面隧道的方法。该方法不但考虑了影响扫描质量的几个因素(隧道尺寸、扫描密度、扫描步长、入射角和扫描仪位置),并且可以最大化扫描距离和角度采样间隔,从而在最短工作时间内达到一定的测量精度。通过在实际隧道中进行扫描测量,证明了所提方法的有效性。
关键词:激光扫描;圆形截面;隧道;测量规划
中图分类号:P 642" " " " " " " " " " " 文献标志码:A
激光扫描是一种测量技术,可以根据所用扫描仪的类型和技术特性,以点云的形式快速、合理准确地重现物体的3D表面[1]。该技术目前应用于各领域,包括遗产文献,地质,监测技术,变形分析和尺寸控制等[2]。目前,因为激光扫描技术能快速扫描隧道并提供挖掘几何形状的3D模型,所以在地下开挖中应用广泛,这种模型的用途包括监测工程进度、监测变形等[3]。尽管越来越多的公司使用TLS进行几何隧道验证,但为了降低使用成本,通常通过提高扫描视野来进行扫描工作[4]。当采集数据时,除了扫描视野距离外,其他影响测量精度的因素会被忽略,例如入射角、扫描密度和隧道本身的几何形状等[5-6]。本文通过研究扫描仪的位置、入射角、扫描密度等因素对圆形横截面隧道几何测量的影响,提出一种使用激光扫描优化隧道扫描任务的数据采集方法。
1 方法论
1.1 位置方程
图1为圆形隧道的理论横截面以及坐标系。激光扫描仪在地面上的高度和与隧道横截面中心的距离是影响扫描结果的两个参数,因此考虑激光扫描仪高度h和与隧道中心的距离t。由用户定义激光扫描仪测量水平(H)和垂直(V)角度、到隧道壁上每个点的距离(r)、角间隔ΔH和ΔV。
隧道圆柱体的坐标系可视为中心位于圆柱体轴线上的坐标系,如公式(1)所示。
x2+z2=R2 " " " " " " " " " " " " " " " " " "(1)
x和z坐标与激光器的位置与公式(2)~公式(4)的观测值相关。
x=t+dsinH" " " " " " " " " " " " " " " " " (2)
z=h+rcosV" " " " " " " " " " " " " " " " " (3)
d=rsinV" " " " " " " " " " " " " " " " " " " (4)
式中:d为距离r在水平面上的投影。
将公式(4)代入公式(2),得到公式(5)。
x=t+rsinVsinH " " nbsp; " " " " " " " " " " " " " " (5)
将公式(5)和公式(3)代入公式(1)中,得到公式(6)。
t2+r2sin2Vsin2H+2trsinVsinH+h2+r2+cos2V+2hrcosV=R2" " " " (6)
根据激光位置和观察的角度获得距离,如公式(7)所示。
(7)
因此,对角度H和V的每个值,都有激光测量距离的理论值。
计算任意点Pi的坐标如公式(8)~公式(10)所示。
xi=t+rsinVsinH (8)
yi=rsinVcosH (9)
zi=h+rcosV (10)
1.2 影响测量精度的因素
公式(8)~公式(10)确定了H和V在任何值下每个激光束能到达的位置,能模拟激光生成的点云,并确定了影响测量准确性的3个因素,即点密度、入射角和步长。
1.2.1 点云密度
获取隧道三维模型时需要考虑的关键因素是扫描点的密度。对半径为R和特定角度增量的圆形隧道来说,可以计算Y轴方向上任意距离的点分布。在实践中,扫描密度越高,扫描的清晰度就越高(达到一定阈值),计算隧道尺寸的误差就越小,高密度扫描也会更耗时。因此应该平衡扫描密度、测量时间和扫描精度。
1.2.2 入射角
规划隧道扫描时要考虑的另一个变量是入射角,它是由扫描仪到隧道表面的矢量(半径矢量)和该点处表面的法线矢量(法向矢量)形成的角度,如图2所示。
计算点Pi处的法向量如公式(11)所示。
Ni=(xi,0,zi) (11)
计算在该点处的半径向量ri如公式(12)所示。
ri=(xi-t,yi,zi-h) (12)
计算入射角α如公式(13)所示。
(13)
入射角过大会降低反射光束的功率,导致信噪比更高、测量色散更大,因此入射角值应小于80°。
1.2.3 激光足迹
当计划扫描时,与入射角和扫描距离有关的另一个需要考虑的因素是每个点的激光足迹。激光足迹采用椭圆形的形状,如图3所示。可以根据距离r、垂直角V或其补角α和设备的角分辨率δ来估计半长轴的尺寸。
1.3 隧道扫描规划
1.3.1 简单扫描
为了计划隧道的扫描,必须考虑影响测量准确性的3个因素以及隧道的半径和扫描仪的位置。确定在最短扫描时间内产生特定精度的距离和角度间隔。通过模拟不同角度分辨率,计算最佳角分辨率值和扫描距离,从而确保在最短的时间内达到所需的精度。
1.3.2 多重扫描
对建议扫描距离来说,大多数隧道中的设备站必须多次设置才能进行完全扫描。说明计划扫描时需要考虑每个站点花费的时间。
执行隧道完全扫描所需的总时间如公式(14)所示。
Ttotal=NSTS+(NS-1)∆T (14)
式中:ΔT为站点更改所花费的时间;Ts为测量每次扫描所花费的时间,并且NS是扫描次数,计算过程如公式(15)所示。
(15)
式中:int(x)为产生小于或等于x的整数的函数;L为隧道的长度;DR为推荐的扫描距离;p为正确对齐这些扫描所需的扫描间的重叠。
考虑角间隔与推荐距离间的关系,通过仿真可以得到角间隔与总扫描时间的关系,以此可以确定与最短扫描时间相对应的最佳角间隔。
2 模拟隧道扫描
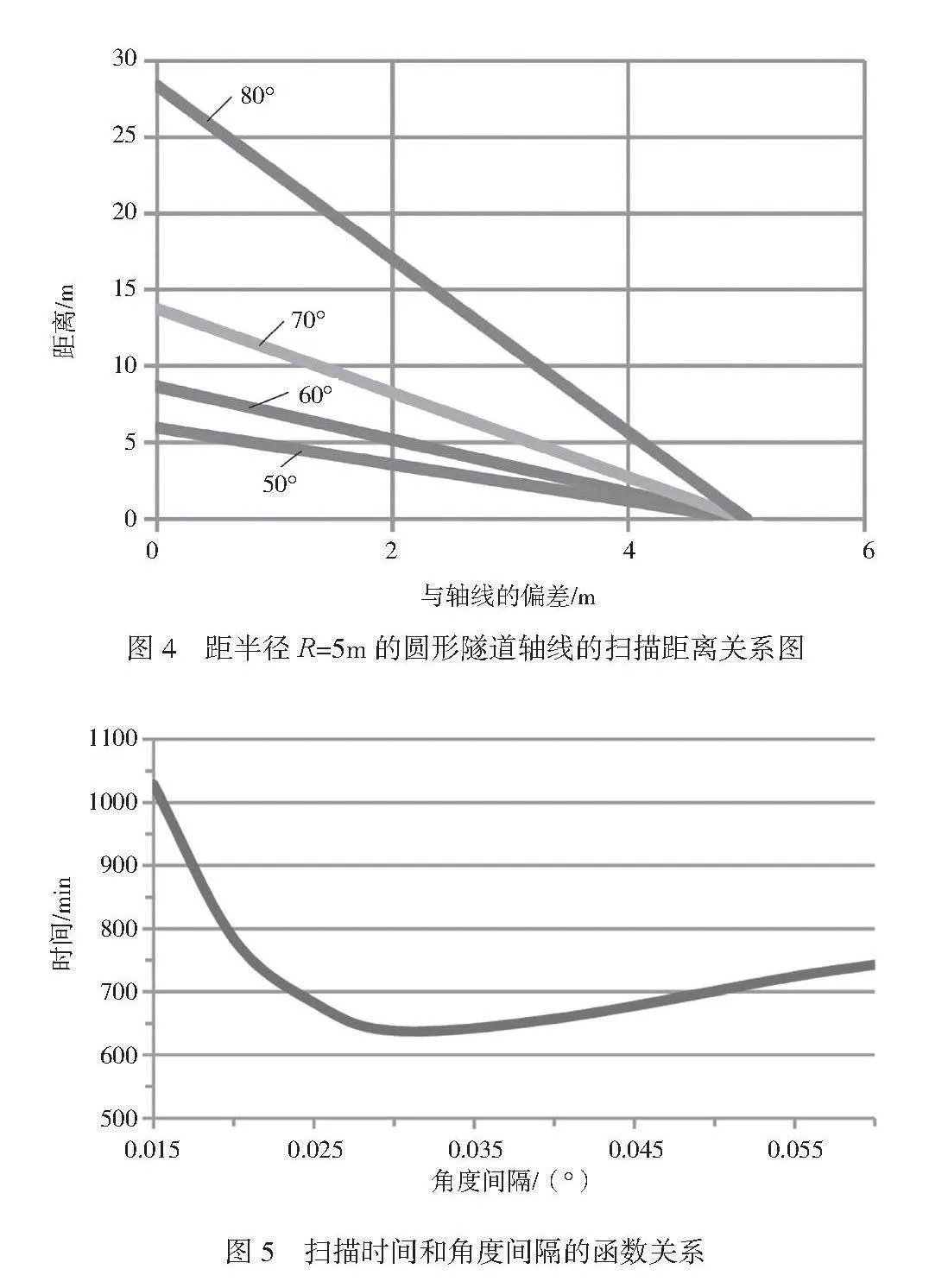
上述方法可应用于任何尺寸和任何激光扫描仪位置的圆形横截面隧道。为说明应用这种方法进行测量计划的结果,设计H和V的角间隔等于0.03°,初始参数R=5m,h=0m和t=0m。
图4为使用公式(13)获得的不同入射角距隧道轴线的扫描距离,可以观察到,利用极限角度得到的扫描距离随着扫描仪与隧道轴的距离呈线性缩短,由此得出了获得不良入射角的距离,因此说明其对扫描计划非常有用。
计算不同扫描距离和角分辨率δ为0.3mrad时的入射角α与足迹尺寸间的关系,结果见表1。为进行比较,角间隔为0.002°(实际使用的设备的最小值)。
表1 入射角α、足迹大小和不同距离点间的间距
距离(m) α(°) F(mm) f(mm)
0.00 0.00 0.75 0.75
2.50 26.57 0.94 0.84
5.00 45.00 1.50 1.06
7.50 56.31 2.44 1.35
10.00 63.43 3.75 1.68
12.50 68.20 5.44 2.02
15.00 71.57 7.50 2.37
17.50 74.05 9.94 2.73
20.00 75.96 12.75 3.09
22.50 77.47 15.94 3.46
25.00 78.69 19.50 3.82
27.50 79.70 23.44 4.19
30.00 80.54 27.75 4.56
从表1可以得出,因为点间的距离远小于足迹大小,所以角间隔过小没有意义。如果t增加,那么在较短的距离内可以明确激光的入射角和激光足迹的值。因此,建议将激光器放置在隧道的中心。
点密度对精度的影响见表2,其显示了近似圆形横截面的闭合多边形的边数(通过连接扫描点形成多边形)。可以看出,与理论表面相比,表面积缩小的百分比随着多边形边数增加(扫描密度增加)而迅速下降。
表2 多边形边数和表面积的计算结果
多边形边数 面积缩小(%) 偏差(mm)
10 6.45 245
15 2.90 109
20 1.64 62
30 0.73 27
40 0.41 15
50 0.26 10
根据上述方法,可以确定达到特定精度所需的点密度,以获得适合扫描距离的值。对角度较小的采样间隔来说,距离相应更远。对更短的间隔来说,距离更远,扫描密度更高,但代价是数据扫描时间增长。
表3为针对0.030°角间隔,记录的点数和最大偏差为10mm的推荐距离值。
表4与表3均反映了扫描长500m的隧道所需的总扫描时间和台站数量,考虑连续扫描间33%的重叠(p=0.33)和30min的台站更改时间滞后。根据这些值,可以得出较高的角度采样间隔,以此可以缩小点云,从而缩短每次扫描时间,因此针对必要的激光扫描仪的位置变化,需要增加工位数量和延长工作时间。小角度采样间隔会过度延长单个扫描时间并产生非常拥挤的点云,这在减少站点数量方面没有优势。
使用表4的数据,绘制图5总扫描时间与角间隔的函数关系的曲线。从曲线中可以看出提供最佳角度间隔,即对建议距离来说,总扫描时间最短的间隔。
3 隧道扫描
为验证结果,本文测量了一条长约105m,拱顶半径约4.3m隧道,该隧道位于旧矿井中,用于装载煤炭。图6为使用激光扫描仪获得的点云隧道几何形状。
工作方法是在隧道入口处的轴线放置扫描仪,将获得的结果与全站仪创建的一系列横截面轮廓的结果进行比较。将全站仪定位在每个轮廓下方的过程中,降低倾斜角度和激光足迹的影响,角间隔为0.030°。为评估入射角和足迹大小对断面的影响,对距离扫描仪10m和90m的隧道的两个区域进行扫描。这两种情况下,点间的间距均为1cm,将结果与使用全站仪测量的剖面进行比较得知,误差大于10m处的剖面。在第二种情况下,大多数误差为厘米量级,对最远的轮廓来说,许多点的误差为2~6cm。当距离扫描仪10m和98m处的点密度相同时,对其进行分析,以此观察距离对测量精度的影响。
4 结论
使用激光扫描仪测量隧道几何形状需要仔细规划,以确保准确性。由于隧道几何形状、扫描仪位置、扫描密度、入射角等是影响测量过程结果的因素,因此提出了一种规划隧道扫描的方法,该方法考虑上述因素,并基于估计角间隔和最大扫描距离,最大限度地缩短工作时间,同时将误差保持在预定阈值以下。并对案例隧道进行了扫描验证,证明该方法的有效性。
参考文献
[1]丁孝兵,高志强,杨坤.基于惯导和CPⅢ控制点的地铁隧道移动激光扫描三维点云重建[J].测绘通报,2021(9):112-115,129.
[2]王辉.长大隧道测量的若干问题探讨[D].西安:长安大学,2020.
[3]王海磊.高速公路隧道建设过程中测量和控制注意事项[J].建设科技,2020(22):101-102.
[4]万传建.隧道区间3D扫描测量技术研究及应用[J].中国勘察设计,2021(7):90-93.
[5]李春宇,万应强,朱言贺.隧道工程施工测量探讨[J].四川建材,2021,47(6):34-35.
[6]甘立彬.基于三维激光扫描技术的隧道工程测量与建模[J].工程勘察,2021,49(6):58-61.