基于图像分割的低空影像预处理与匹配
2024-12-17梁日裕黄留波



摘 要:为解决当前低空影像匹配准确率低,影响图像资源利用价值的问题,本文基于图像分割研究低空影像匹配。在匹配前,须预处理低空拍摄的影像。在此基础上,提取影像特征点与特征面,描述并匹配低空影像,提出一种新的低空影像匹配方法。试验结果说明,图像分割后,新的匹配方法准确率明显提高,有效提升低空影响资源利用价值。
关键词:图像;分割;低空;影像;匹配
中图分类号:TP 391" " " " " " " " " " " " " " " " " 文献标志码:A
与其他影像采集方法相比,本研究提出的低空影像测量方法具有拍摄高度低等特点,因此,影像受到大气环境中云雾遮挡影响的概率更低,可以作为一种有效的补充,完善航空和卫星摄影测量[1]。须在正式使用前预处理低空拍摄的影像,包括处理图像中的重叠内容等[2],该步骤对提高低空摄影测量的精度和效率具有重要意义。
1 低空影像预处理
在低空飞行过程中,相机受到几何运动、振动、遮挡、气象和风力等多种因素影响,相邻或相同波段的图像在亮度、色度和特定尺度等方面存在差异,造成图像质量差异,因此,必须对其进行预处理。
1.1 几何畸变差纠正
几何畸变差的纠正方式如下,根据2组平行关系进行仿射校正,再根据2组垂直关系进行度量校正。仿射校正恢复平行关系,度量校正恢复垂直关系,使图像与真实尺寸之间为相似关系[3]。为保证低空影像几何畸变差纠正达到预期效果,应建立纠正模型,如公式(1)、公式(2)所示。
(1)
(2)
式中:u、v为已经完成几何畸变纠正的低空影像相关坐标;n为相关多项式;i、j为放射系数;xi、yj为放射系数为i和j的未完成几何畸变纠正的低空影像相关坐标(原始坐标);aij为放射系数为i和j的横坐标待测定参数;bij为仿射系数为i和j的纵坐标待测定参数。
1.2 图像平滑处理
图像平滑处理的目的是保证图像整体亮度变化呈现一种较为平缓的趋势,提高影像的综合质量[4]。
平滑处理的基本原理是通过改变图像中每个像素点的灰度值,减少噪声的视觉效果。当进行平滑处理时,注意不要过度平滑,以免图像细节和边缘信息丢失[5]。平滑处理过程如公式(3)所示。
(3)
式中:g(x,y)为平滑处理后的影像;m为色彩深度,也称位深度;f(m,n)为窗口像素值(未平滑处理的影像);s为像素点个数。以某低空影像为例,按照上述方式对其进行平滑处理,处理前、处理后如图1所示。
对完成平滑处理后的图像进行空间域增强处理。与其他预处理相比,增强处理的目的性较强,按照规范预处理图像,可以细化影像中线状结构物体的细部特征[6]。处理过程如公式(4)所示。
(4)
式中:d(x,y)为图像的空间域增强处理;w(s,t)为图像空间域转换模板函数;f(x+s,y+t)为经过图像空间域转换模板函数w(s,t)转换后的图像空间域。经过上述步骤,完成图像的预处理。
2 基于图像分割的低空影像匹配
2.1 基于图像分割的影像特征面与特征点提取
当提取影像特征面时,需要从影像背景中分割对匹配有利的地物类图像,并形成一个或多个独立的区域,便于后续进行匹配[7]。提取影像特征面后,结合FCM分割图像,FCM是一种非监督类型的分类方法。利用该方法分割图像,优化目标函数,计算每个样本点所对应的所有类中心的隶属度,进而确定样本点的类属,完成数据分类。图像分割的基本思路如下:将N个向量XI分成C组,对非相似性的指标价值函数来说,需要在其达到最小值的前提条件下求解每组聚类中心[8]。图像分割的价值函数如公式(5)所示。
(5)
式中:C为向量总和;JI为某一点I上的数据;I、J为节点;UM IJ为第I个聚类中心与第J个数据点之间加权指数为M的隶属度;J(U,C1,…,CC)为图像分割的价值函数,C1,…,CC为模糊组的聚类中心;DIJ为第I个聚类中心与第J个数据点之间的距离;M为加权指数,在公式(5)中,M取值为2。当计算结果为最小值时,须满足下述条件,如公式(6)所示。
(6)
式中:CI为模糊组中的第I个聚类中心;XJ为模糊组中的第J个向量。除此之外,还应当满足下述条件,如公式(7)所示。
(7)
式中:UIJ 为数据点对模糊组的隶属度,数值为 0 ~1 ;DKJ为第K个聚类中心与第J个数据点之间的距离。
初始化的隶属度矩阵U,其取值在0~1,为1个随机值,矩阵中所有的隶属度相加和为1。按照价值函数进行计算,当价值函数取值小于设定的阈值时,或当价值函数取值与上一次价值函数取值的差小于设定的阈值时,此时停止运算。利用图像分割技术,按照影像的像素光谱信息聚类图像。
2.2 特征面与特征点描述与匹配
在提取影像特征面与特征点后,描述特征面以及特征点,计算过程如公式(8)所示。
Y=4πA/L (8)
式中:A为连通域或圆形的面积;L为周长;Y为连通域、圆形等结构的相似程度,Y越大,圆形的相似度越高;Y越小,图形形状越狭长。利用长宽比R描述特征面,计算过程如公式(9)所示。
R=B/E (9)
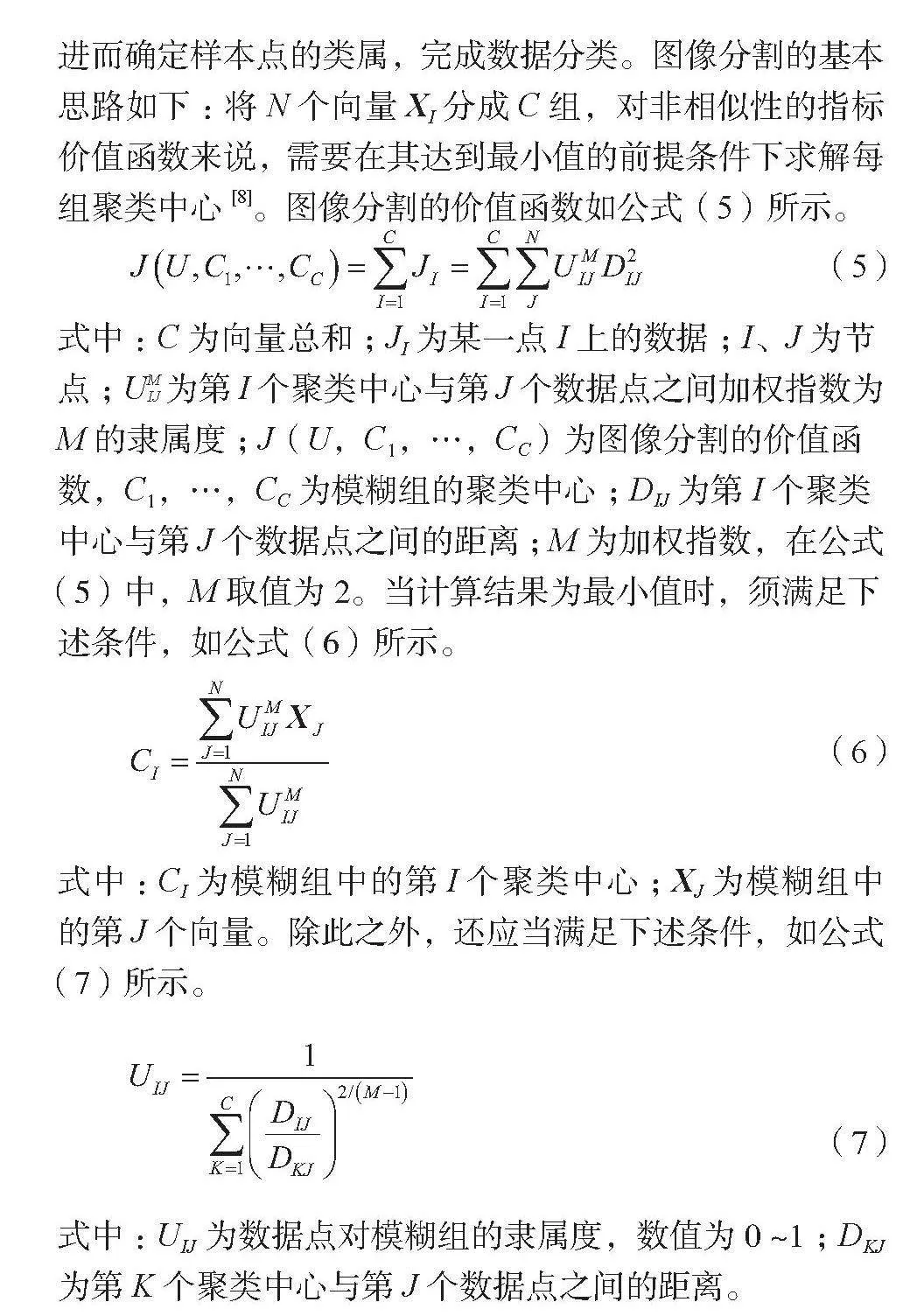
式中:B为一个连通域的最小矩形宽度;E为一个连通域的最小矩形长度。当匹配2幅低空影像时,需要计算2幅影像各连通域的Y值和R值,结合事先设定的阈值,确定唯一匹配面。特征面与特征点之间的关联如图2所示。
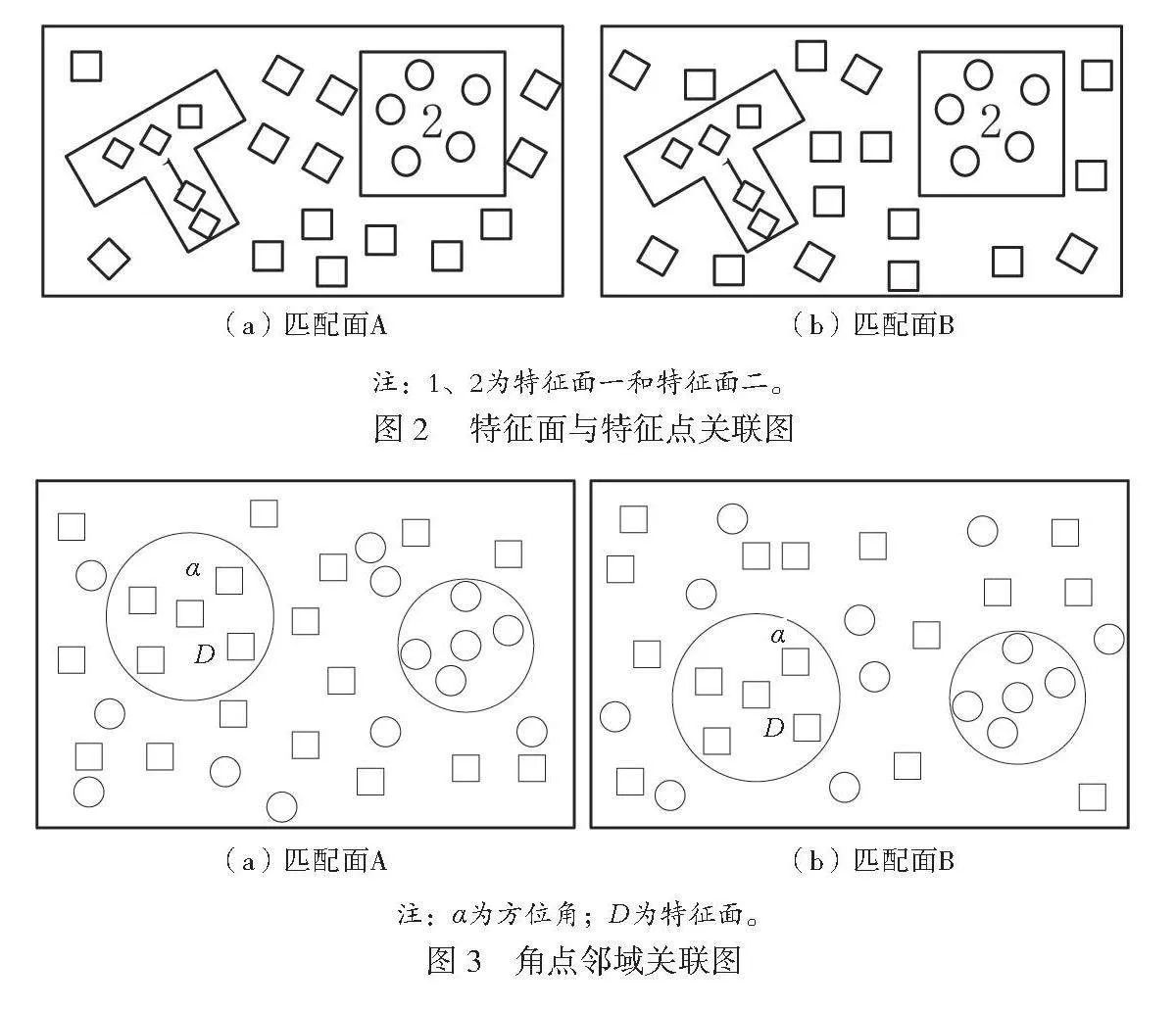
从图2可以看出,当图像中存在2对匹配平面时,匹配平面上的角点只需与相应平面上的角点进行对比,不需要重新查找所有的角点。可以结合邻域信息描述符匹配特征点。角点邻域关联如图3所示。
在图3中,角点与其邻域中相应的其他角点之间的坐标方位角α应该一致。用角点、距离和坐标方位角来刻画角点特征,并进行匹配,存在多对匹配的可能性。这时,只保留特征面D和方位角α之差较小的点对作为匹配点对并存储。
3 匹配效果分析
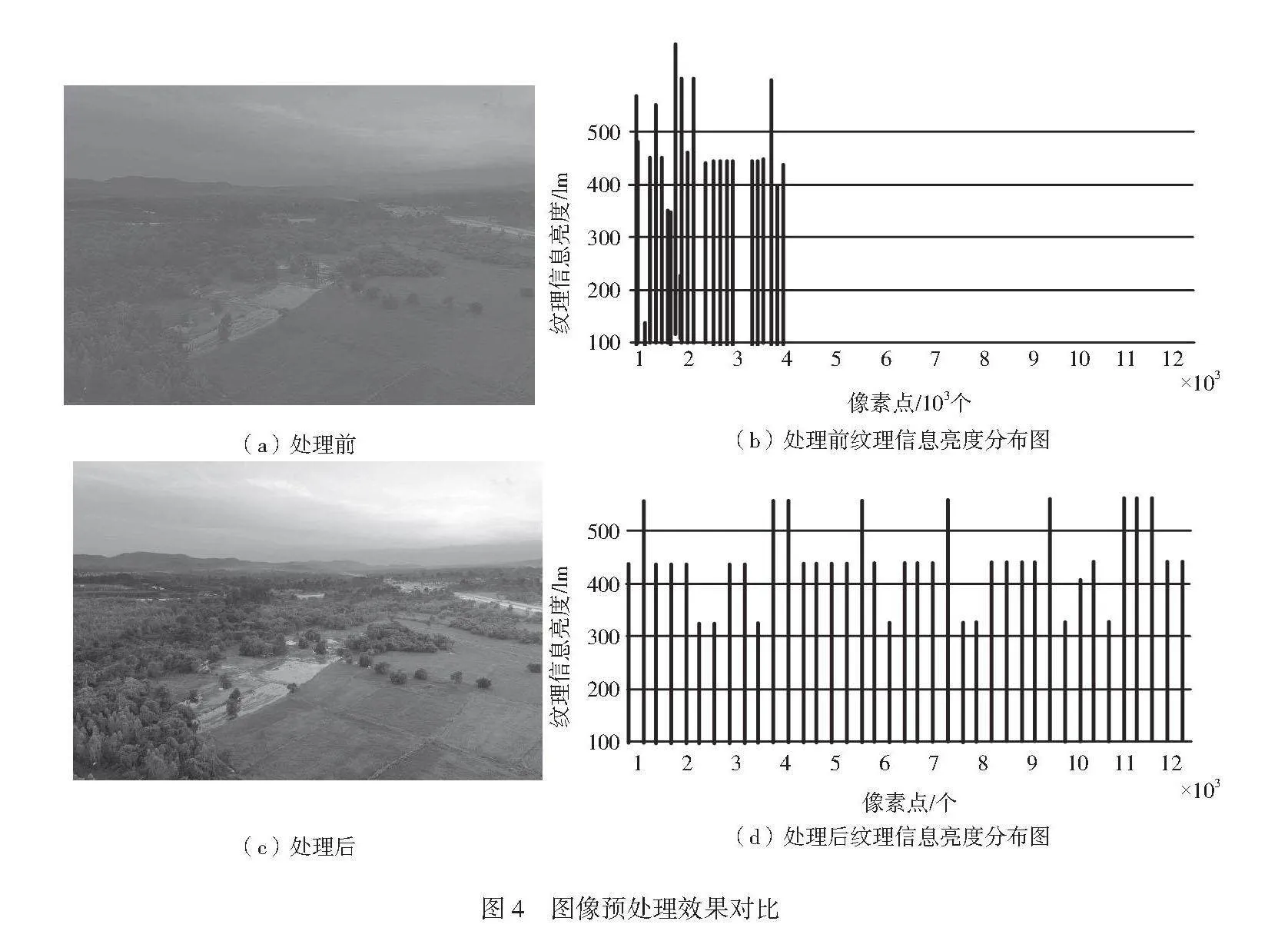
在上述内容的基础上,利用本文方法预处理低空影像,分析影像匹配效果,效果对比如图4所示。
从图4中可以看出,预处理前,图像清晰度较差,纹理细节不清晰且亮度集中,图像整体均衡性较差。处理后,图像清晰度显著提升,纹理细节十分清晰。从对比结果可以看出,图像整体均衡性良好,说明本文方法在低空影像预处理中的应用效果较好。
在此基础上,选择某低空影像数据库作为测试样本,使用不同方法匹配低空影像。正确匹配率见表1。从表1中可以看出,与其他方法相比,本文方法不仅可以提取低空影像中更多的特征点信息,还可以精准匹配影像中的特征点,细化影像中的纹理与特征信息。
4 结语
随着低空影像技术不断发展,基于图像分割的低空影像匹配将会得到更广泛的应用。未来的研究主要包括以下2个方面。1)改进图像分割算法。开发更快速、准确和自适应的图像分割算法,以满足在实际应用中大规模的高分辨率低空影像的处理需求。2)优化匹配策略。研究更稳健、高效和智能的匹配策略,以提高匹配的精度和稳定性,降低传播误差。
综上所述,基于图像分割的低空影像匹配技术作为低空摄影测量和地理信息系统的重要支撑,将在未来发挥越来越重要的作用。
参考文献
[1] 潘明,谭海,钟旭辉. 结合风格迁移与边缘特征的SAR与光学影像匹配[J].北京测绘,2023,37(7):938-943.
[2]董海涛.基于多级格网技术的多层影像匹配算法的并行改进[J].黑龙江科学,2023,14(10):82-84.
[3]吕欣阳,樊冬丽,张广运,等.无人机影像匹配点云的露天矿台阶高度计算方法[J]. 测绘通报,2023(5):135-139.
[4]喻鹏飞,李浩,何秀凤,等.利用词袋模型估计尺度差异的异源影像匹配方法[J].计算机与现代化,2023(4):56-61,72.
[5]范佳鑫,王春,代文,等.基于多尺度高程变异系数的影像匹配点云滤波方法[J].地理与地理信息科学,2023,39(2):25-31.
[6]鲍秀武,梁文彪,刘也.基于倾斜摄影测量点云与影像匹配的像控点坐标自动提取方法研究[J].城市勘测,2023(1):105-109.
[7]方云霞,徐大展,张畅,等.基于多种影像匹配点云的DSM生产方法研究——以桐乡市为例[J].测绘与空间地理信息,2022,45(7):52-54.
[8]高莎,袁希平,甘淑,等.集成SIFT算法与检测模型优化的UAV影像匹配方法[J].光谱学与光谱分析,2022,42(5):1497-1503.