基于Cuk拓扑结构的双向DC/DC变换器的研究
2024-12-11田欣欣杜力

摘 要:针对双向DC/DC变换器在能量双向传输时存在电压电流波动的情况,采用基于Cuk拓扑结构的双向DC/DC变换器。通过PI控制器加入电流反馈环来抑制在能量传输时所产生的电压电流波动。在LTspice软件和Matlab/Simulink仿真软件中对系统的输出电压及电流进行了稳定性分析。从而实现基于Cuk拓扑结构的双向DC/DC变换器的电路设计,PI控制器设计、以及系统的开闭环仿真。
关键词:Cuk电路 双向DC/DC转换器 蓄电池充电 PI控制
1 绪论
人们对自然资源的需求增长迅速,迫切希望寻找环保、高效和可持续的新能源,以替代传统的化石能源,优化能源结构,以满足社会生产生活的需求[1]。在新能源的实际应用中,各类能源会受到不同条件的影响,通常需要将多种变换器组合成系统来满足实际需求。双向DC-DC变换器作为变换器关键的能量转换组件,能够有效地传递能量并进行电压调节,其在新能源发电、车辆到电网、电池储能、不停电系统等领域中被广泛应用[2]。在储能系统中同样发挥着重要作用[3],在传统的BES单元,仅仅是将能量直接储存入锂电池中,无法发挥锂电池的性能在充放电方面的优势,能量会由锂电池两侧的并联电容等元件消耗掉,这样会导致电能的大量流失,因此在新型储能系统中,广泛使用了双向DC/DC变换器,大大提高了系统能量的利用效率[4]。在光伏发电系统应用中双向DC/DC变换器充当一个缓冲机制来调理发电量和负载之间供需问题的矛盾[5]。
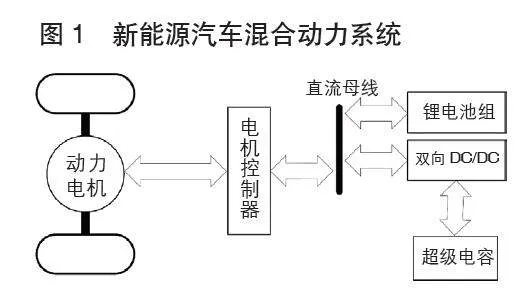
新能源汽车一般会选择锂电池和超级电容组成的复合电源系统[6]。锂电池与超级电容这两个供能装置之间是通过双向DC/DC变换器来连接,从而实现能量的双向流动。
非隔离双向DC/DC变换器的结构有很多,例如双向Buck/Boost、双向半桥、双向SEPIC以及双向Cuk电路变换器等。其中Cuk结构的双向DC/DC变换器相比于其他变换器而言具有输出功率大、输出电流连续、功率开关管所承受的电压、电流较小等诸多优点。(图1)
2 Cuk拓扑双向DC/DC变换器
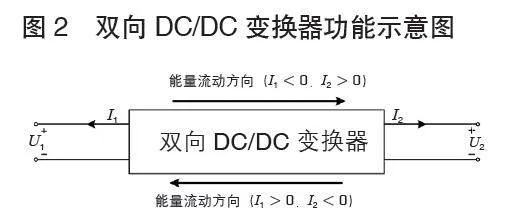
双向DC/DC变换器的两个端口中,每一个端口都既可以是输入端也可以是输出端,所以能量能够实现双向传输。能量的流动方向如下图所示,可以根据电流I1、I2的方向来判断,但是能量的传输方向是由开关管的工作状态决定的。
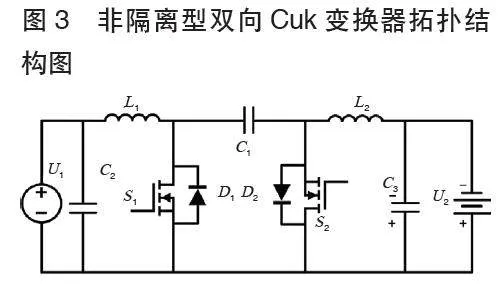
基于Cuk拓扑结构的双向DC/DC变换器的结构是由两个单向Cuk变换器反向串联形成的。结构中的两个开关管不同时工作,一个工作时另一个就关断。当开关管S1正常工作、S2不工作时,能量从左向右传输。当开关管S2正常工作、S1不工作时,能量从右向左传输。本文研究的是不带电气隔离的拓扑结构。结构图如下所示。
当开关管S1正常工作、S2不工作,能量从左向右传输时,整个电路的状态分为两种。即在一个PWM信号周期内S1的导通以及关断状态。
当S1导通时:S1的体二极管D1反向截止,输入端的电流流向为U1—L1—S1,输出端的电流流向为C1—S1—U2—L2。此时的电源U1给电感L1充电,电容C1给电池U2以及电感L2充电。
当S1关断时:S1的体二极管D1反向截止,S2的体二极管D2正向导通,输入端的电流流向为U1—L1—C1—D2,输出端的电流流向为U1—L1—C1—D2。此时U1电源与电感L1同时向电容C1充电,电感L2给电池U2充电。
当S1导通、S2关断时有:
当S1关断、S2关断时有:
在一个周期内的A、B两点的电压为:
上式中的T为一个开关周期,ton为一个周期内的导通时间,toff为一个周期内的关断时间。
整个开关周期中,由电感 L1和电感 L2的伏秒平衡可知:
则由上式可得U1和U2的关系如下:
当S2正常工作、S1不工作能量从右向左传输时,整个结构的电路分析和上述过程一样,最终可以得到
上式中是开关管一个周期内的导通占比称为导通占空比。通过选取占空比的大小可以控制变换器的工作模式是在升压或是降压模式。
3 控制器设计
虽然Cuk电路的输出电流是连续的但是会存在波动,因此需要设计一个控制器来进行控制,使变换器能够平稳输出,提高系统安全性的同时还能够延长电池的使用寿命。
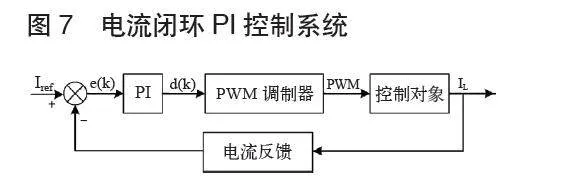
闭环系统以输出侧的电感电流为反馈信号,然后与设定值作比较得到系统差值经PI控制器输出控制信号到PWM调制器控制输出PWM波的占空比来控制输出的电流。
此次研究采用线性PI控制法,该法具有稳定性强、结构简单和适应性广的优势。PI控制器通过结合比例(P)和积分(I)作用,可以有效提高系统的稳定性。比例部分能够快速响应误差,调整控制输出,而积分部分则持续累积误差,从而消除稳态误差,其输出函数如式(7)所示:
式(7)中的Kp为比例增益、Ki为积分增益、τ为积分时间常数。
PI控制器中,Kp是比例增益,根据当前误差值产生一个与误差成正比的控制信号,可迅速响应误差[9],但无法消除系统的稳态误差。而Ki是积分环节,对误差进行时间积分,以此来消除系统的稳态误差[10]。积分时间常数τ用于调节积分环节的响应特性,τ决定了控制器对误差的累积速度。较小的τ值可以使积分作用更强,能够快速消除稳态误差,提升系统的动态响应。然而,过小的τ值会导致系统震荡或不稳定。相反,较大的τ使系统对误差的反应变得平稳,但调整速度较慢,可能导致长期误差难以消除。
根据开关的状态得以得到两个电感L与输出电压之间的关系式:
经过拉氏变换得:
4 系统仿真
4.1 LTspice双向变换器开环仿真
图8仿真结果所使用的参数一方面如图上所示,其中PWM信号的占空比为0.5,频率为20kHz。从上图中不难看出双向变换器的正反向输出相同,且输出端电感上的电流虽然是连续的,但是一直处于波动状态且纹波较大,峰峰值更是接近190mA。
4.2 系统开环MATLAB仿真
电感中的电流和LTspice仿真中的电流基本相同,作为中间能量传输元件C1的电压几乎保持不变,浮动峰值只有0.0065V。(图9)
4.3 双向DC/DC系统闭环MATLAB仿真
系统的Kp、Ki分别设置为20和0.01,电流的参考值设定为2A。相比于开环的系统输出,闭环的系统输出电流要稳定的多,而且整个系统响应速度很快,输出电流无超调,最终的输出是一种无静差的稳定输出电流。而且输入电流的超调量也小。(图10)
5 结语
本文在阐述基于Cuk拓扑结构的双向DC/DC变换器基本工作原理的基础上,主要研究基于Cuk拓扑结构的双向DC/DC变换器控制器的设计与实现。介绍了基于Cuk拓扑结构的双向DC/DC变换器拓扑结构,并对其结构以及工作状态进行了分析阐述,得到其输入输出关系式。然后设计控制器,最后完成了基于Cuk拓扑结构的双向DC/DC变换器的设计与仿真。利用LTspice、MATLAB仿真软件完成了该变换器系统的建模搭建以及系统的开环、闭环仿真。仿真结果也证实了理论分析的正确性。
参考文献:
[1]陈鼎圣.基于混合控制策略的全桥推挽双向DC-DC变换器研究[D].厦门:厦门理工学院,2021.
[2]罗琳.考虑新能源发电不确定性的配电网重构策略研究[D].长沙:湖南大学,2019.
[3] Shahid M U, Khan M M, Hashmi K, et al. Renewable Energy Source (RES) based Islanded DC Microgrid with Enhanced Resilient Control[J].International Journal of Electrical Power & Energy Systems,2019(113):461-471.
[4]姚维平,鄂志君,张宁,等.光伏电力混合储能系统的能量管理策略研究[J].可再生能源,2021.
[5]崔新风.双向CukDC/DC变换器软开关技术研究[D].秦皇岛:燕山大学,2015.
[6]孙文文.新能源汽车双向DC/DC变换器预测控制研究及其实现[D].武汉:武汉理工大学,2020.
[7]张维森.零电压开关双向Cuk型DC/DC变换器研究[D].郑州:郑州大学,2018.
[8]王传晓.电动汽车V2G充放电机的研究[D].淄博:山东理工大学,2014.
[9]周楚.基于DSP的数字PID控制DC/DC变换器的设计[D].武汉:华中师范大学,2015.
[10]王煜.DC/DC变换器非线性控制方法研究[D].北京:北方民族大学,2020.