基于视觉识别的光伏板清洁机器人设计
2024-12-09邵家乐王玉勤朱庆卓孙含冰左梦强


摘 要:【目的】针对光伏板表面污垢导致的发电效率低的问题,设计了一种基于视觉识别的光伏板清理机器人。【方法】使用SolidWorks软件来建立光伏板清洁机器人三维模型。所设计的机器人集成了视觉识别装置、履带驱动装置和干湿混合清洁装置等结构,可以自动识别光伏板表面污垢的分布情况,并进行路径规划,从而提高机器人的清洁速度。【结果】为检验机器人的支撑架强度能否满足使用要求,对其进行有限元分析。结果表明,所设计的机器人支撑架结构合理,强度符合要求。【结论】所设计的光伏板清洁机器人具有清洁效率高、低成本低等优点,对光伏产业的发展起到了积极的推动作用。
关键词:光伏板清理机器人;视觉识别装置;路径规划;支撑架
中图分类号:TH137.5 文献标志码:A 文章编号:1003-5168(2024)21-0023-04
DOI:10.19968/j.cnki.hnkj.1003-5168.2024.21.005
Design of Photovoltaic Panel Cleaning Robot Based on Vision
Recognition
SHAO Jiale WANG Yuqi ZHU Qingzhuo SUN Hanbing ZUO Mengqiang
(School of Mechanical Engineering, Chaohu University, Hefei 238024, China)
Abstract: [Purposes] Aiming at low power generation efficiency caused by dirt on the surface of photovoltaic panels,a photovoltaic panel cleaning robot based on visual recognition is designed. [Methods] Three-dimensional model of photovoltaic panel cleaning robot is established by SolidWorks software. The designed robot integrates visual recognition device, crawler drive device and wet-dry mixed cleaning device, which can automatically identify the distribution of dirt on the surface of photovoltaic panels and plan the path to improve the cleanhKRiKT1OZ+uhOML14XZ/zw==ing speed of the robot. [Findings] In order to test whether the strength of the robot carriage meets the use requirements, the finite element analysis is carried out. The calculation results show that the structure of the designed robot carriage is reasonable and the strength meets the requirements. [Conclusions] The designed photovoltaic panel cleaning robot has the advantages of high cleaning efficiency and low cost, which has played a positive role in promoting the development of photovoltaic industry.
Keywords: photovoltaic panel cleaning robot; visual recognition device; path planning; carriage
0 引言
随着全球能源结构的转型和居民环保意识的提升,光伏能源作为一种可再生能源受到业界的广泛关注。光伏板是光伏发电装置的核心部件,其发电效率主要受太阳光照射面积的影响。然而,在实际应用中,光伏板表面可能会积累灰尘、鸟粪等污染物,这不仅导致发电效率降低,还有可能引起设备故障,进而缩短光伏板的使用寿命[1]。因此,实现对光伏板表面污垢高效且环保的清洁,对提升光伏发电装置的发电效率至关重要[2]。
传统的人工清洗光伏板的方式存在诸多缺点,如劳动强度大、清洗效率低、清洁效果不稳定及安全隐患多等;而大型机器清洗方式也面临前期投入大、维护成本高等困境。为了能有效解决上述问题,众多科技工作者正在积极推进相关领域的研究工作,探索更高效、经济的清洁技术解决方案。徐晨阳等[3]通过对光伏清理机器人的行走机构和清洁机构进行设计,提高了其运动的稳定性。尉李纲等[4]对光伏清理机器人的驱动机构进行优化设计,开发出一款运行稳定的履带式BAPV无轨清洁机器人。闫九祥等[5]开发出一种新型的面向大型太阳能光伏电站的机器人控制系统,提高了光伏板清洁效率。
为了提高对光伏板表面污垢清理效率,本研究拟设计一款基于视觉识别的光伏板清洁机器人,实现对光伏板表面污垢的快速清除。该装置采用先进的视觉识别技术,能够精准识别光伏板表面的污渍和积尘,并自助规划出清洁路径,开展自动、高效的清洁作业。
1 工作原理及设计思路
1.1 工作原理
光伏板清洁机器人集成了自主导航、清洗装置、智能控制系统、水源和清洗液供应、远程监控和管理等功能模块。在执行任务时,机器人先进行系统自检,在确认视觉识别装置、干湿混合清洁装置等运作正常后,利用高精度视觉传感器来精准识别出光伏板表面污垢位置与布局,并结合环境信息智能规划出最优清洁路径。机器人根据预设的路径自动导航,在运行过程中通过传感器反馈的信息能灵活调整清洁力度和策略,以确保光伏板表面的污垢能被彻底清除,同时可避免对光伏板面造成损伤。在清洁任务完成后,机器人将会自检清洁效果,并记录详尽的数据,再自动返回充电站补充能源。
1.2 整体设计思路
清洁机器人通过各模块的协同工作,能实现对光伏板表面的高效、精准清洁。视觉识别装置通过高清摄像头和先进的图像识别算法,为机器人提供精确的定位和导航,确保清洁工作的准确性和高效性。视觉识别装置的应用使得机器人能够准确识别出光伏板的位置和布局,从而实现高效清洁。干湿混合清洁装置采用微水雾喷射技术,不仅能快速且彻底地清洁光伏板表面,还能有效节约水资源。微水雾的喷射方式在减少用水量的同时,确保清洁效果,实现了环保与效率的结合。履带驱动装置赋予机器人强大的移动能力。橡胶材质的履带结构在组件表面爬行时增大了接触面积,从而减少了光伏板单位面积所承受的压力,有效避免了对光伏板面的损伤。通过行走轮的转速差,机器人能够灵活转向,适应各种复杂的光伏板环境和布局。水源和清洁液供应模块确保了清洁过程中所需物资的稳定供应,为机器人的持续运行提供了保障,确保清洁机器人在长时间工作时,能保持清洁效率和质量。光伏板清洁机器人的三维模型如图1所示。
2 主要模块设计
2.1 视觉识别装置
视觉识别装置是清洁机器人的核心组成部分之一,高清摄像头具有极高的分辨率,能捕捉到光伏板表面的每一个细微之处[6]。无论是灰尘的积聚还是污渍的分布,都能被高清摄像头精准识别。识别到的图像数据被实时传输至机器人的图像处理单元,该单元由图像传感器、图像采集卡和处理器组成。图像传感器负责将观察区域的光学图像转换为电信号,然后传递给图像采集卡进行数字化处理。处理器作为视觉传感器系统的核心,用于处理和解析从图像采集卡获得的图像数据,使清洁机器人能够准确识别光伏板上的污渍类型和位置。图像处理单元的高效运作确保了清洁机器人在执行任务时的准确性和高效性。
2.2 清洗装置
清洗装置由喷淋装置和清扫装置组成,采用干湿混合的清洁方式,确保光伏板得到彻底且细致的清洁。高压喷水口作为关键部件,其喷射出的水流具有强大的冲击力,能高效迅捷地去除光伏板表面的污垢。装置的多喷水口设计确保了水流的均匀性和覆盖范围,使得每一块光伏板都能得到充分的清洁。前端滚刷在清洁过程中发挥着重要作用,其能够深入清除光伏板表面的顽固污渍和颗粒物。滚刷的高速旋转与喷水口的水流相结合,能有效清除光伏板表面的污渍和颗粒物,恢复光伏板面的清洁。此外,清洗装置还具有智能调节功能。通过先进的传感器和算法,清洗装置能够根据光伏板表面的实时脏污程度,自动调整喷水口的压力和滚刷的转速。这种智能调节不仅避免了过度清洁或清洁不足的问题,还确保了整个清洁过程的安全性和可靠性。
2.3 履带驱动装置
履带驱动装置为清洁机器人的移动提供了坚实的基础,确保了其在高效清洁作业中的稳定性。采用先进的履带式驱动技术,使机器人能够轻松应对各种复杂地形,如履平地[7]。此外,履带式设计显著降低了清洁机器人在光伏板上打滑的风险,保障了清洁作业的连续性和安全性。清洁机器人的履带驱动装置配备了精准的控制系统,该系统利用视觉识别装置实时感知周围环境的变化,使得机器人能够有效躲避障碍物,并规划出一条安全路径,从而在面对不同环境和布局的光伏板时,都能准确、高效地到达清洁位置[8]。这种智能控制策略显著提高了整体清洁效率,展现了清洁机器人在实际应用中的灵活性和可靠性。
3 有限元分析
清洁机器人在工作过程中需要承受自身重量、清洗工具重量及动态载荷。支撑架作为承载这些载荷的关键部件,其结构强度和稳定性将直接关系到机器人的工作效率和安全性。长期运行的支撑架受疲劳、腐蚀等因素的影响会发生变形或损坏,影响机器人的性能。
为确保支撑架在整个生命周期内保持较高的稳定性,采用SolidWorks软件对其进行有限元分析,模拟不同工况下支撑架的受力情况。这种分析有助于在确保结构强度,并优化支撑架的材料分布和几何形状。通过确定材料使用的合理厚度和尺寸,不仅能避免材料浪费,提高材料利用率,还能实现轻量化设计,从而提高机器人的性能和经济性[9]。利用SolidWorks建立支撑架的三维模型如图2所示。
在设计清洁机器人的支撑架时,考虑到材料的力学性能和经济性,选择合金钢作为加工材料。所选用的合金钢性质如下:密度为7 700 kg/m³、杨氏模量为190 GPa、泊松比为0.28、抗拉屈服强度为980 MPa。这些特性使得合金钢成为支撑架的理想材料。
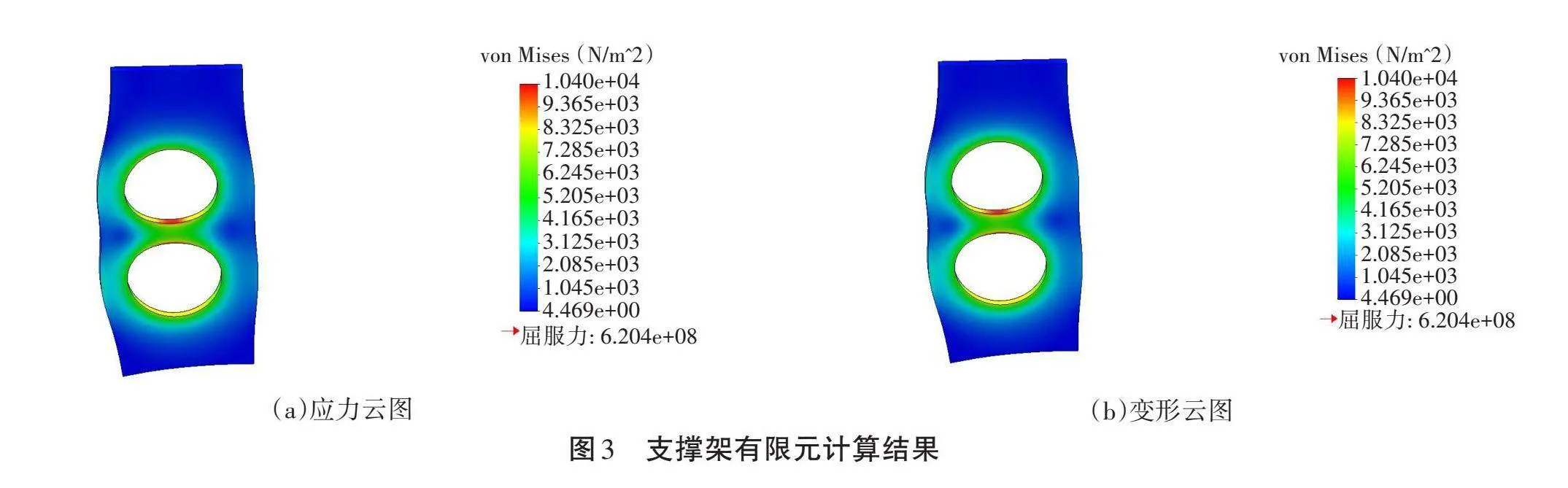
在材料约束设定完成后,对支撑架进行零件网格划分,分解成由节点和单元组成的网格系统,便于分析和计算。网格划分结束后,对零件添加约束条件,完全约束了支撑架的六个自由度。由于支撑架需要承受机器人自身的重量、清洗工具重量及工作时的动态载荷,对支撑架施加了模拟载荷,并进行了等效应力和总变形的计算,进行静应力分析。得到的支撑架的应力云图和变形云图如图3所示。
由图3可知,支撑架所受到的最大等效应力为0.104 MPa,远小于合金钢的许用抗拉屈服强度。支撑架的最大变形为6.171×10-6 mm。由此可知,所设计的支撑架结构性能满足设计要求。
4 样机制作
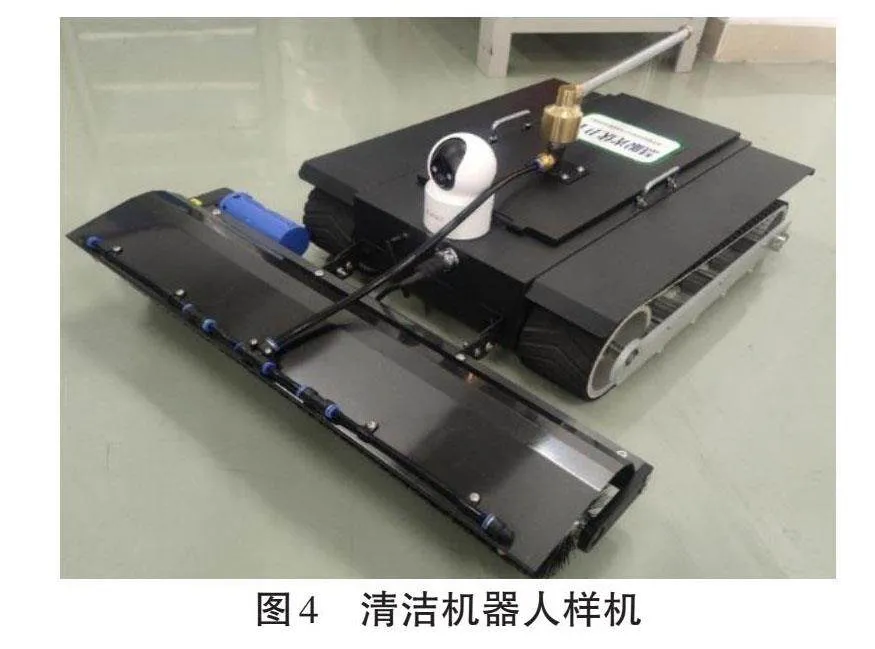
根据三维建模制作的清洁机器人样机如图4所示。该样机集成了先进的视觉识别装置、干湿混合清洁装置和履带清洁装置等模块,能够精准识别出光伏板表面的污垢分布,经测试,该清洁机器人具有高效率清洁光伏板表面污垢的能力。
5 结语
为了有效提高光伏板表面清洁效率,设计出一种基于视觉识别的光伏板清洁机器人。该机器人搭载了先进的视觉识别装置,能够精准快速地识别出光伏板表面的污垢分布情况,确保了其清洁工作的效率和有效性。配备的履带驱动装置使机器人可以轻松应对各种复杂环境,提高越过障碍的能力,同时减少对光伏板表面的损害。干湿混合清洁装置让机器人在清洁时的选择更加多样化,机器人能够智能选择清洁策略,实现更加节能环保的清洁效果。利用SolidWorks软件构建机器人的三维模型,并进行了相关的应力应变分析。通过对比加载前后的数据,可以确定所设计的机器人支撑架结构合理,能够满足强度要求。综上所述,本研究设计的基于视觉识别的光伏板清洁机器人具有清洁效率高、适应性广和自适应调节能力强等优点,为未来光伏板表面清洁技术的发展提供了有力的技术借鉴。
参考文献:
[1]邢玉东.光伏清洁机器人的设计与实现[D]. 天津: 天津理工大学,2019.
[2]董伯先.浅析光伏电站清洁机器人的应用现状[J]. 太阳能,2020(3):46-50.
[3]徐晨阳,周全民,王春旭,等.光伏板智能清洁机器人设计与实现[J]. 机床与液压,2024,52(11):13-19.
[4]尉李纲,宋鉷,魏顺勇,等.履带式BAPV无轨清洁机器人[Z].绍兴:绍兴舜海智能装备有限公司,2023.
[5]闫九祥,王亚丽,魏盼盼,等.一种新型太阳能光伏板清洁机器人控制系统的设计[J].山东科学,2017,30(4): 112-117.
[6]文家平.基于视觉识别技术的全自动捞渣机器人研发与优化[J].信息科学与工程研究,2024,5(1):34-36.
[7]钟勇,李方舟,邱煌乐,等.一种适合大面积清扫的光伏板清洁机器人设计[J].科技与创新,2023(11):129-131,134.
[8]严瑞阳.光伏清洁机器人结构优化设计与运动特性分析[D].合肥:安徽建筑大学,2023.
[9]卢红煜,秦明旺,王浩坤,等.自动翻越式玻璃幕墙清洁机器人设计[J].机械制造与自动化,2021,50(6):181-185.