汽车转向系统的车辆参数配置设计与实现
2024-12-09杨志夏丰收范煜许骥李月红刘鹏






【摘 要】随着汽车智能化与个性化需求的日益增长,如何在保证车辆功能多样化的同时,实现软件的高效复用与统一维护,成为汽车行业面临的重要挑战。文章提出汽车配置参数(Car Config Parameter,CCP)的概念,详细介绍CCP在软件开发中的实现过程,包括配置参数的定义、报文的接收与检验、诊断报码的实现以及高级功能和转向手感的选择。最后,通过CANoe对转向系统发送CCP配置参数来进行仿真和验证。结果表明该设计能够有效地实现配置参数的动态加载与功能切换,并且能够按照预期报出诊断故障码(DTC)。
【关键词】汽车配置参数;DTC;高级功能;Tuning参数
中图分类号:U463.654 文献标识码:A 文章编号:1003-8639( 2024 )11-0047-04
Design and Implementation of Vehicle Parameter Configuration of Automobile Steering System
【Abstract】With the increasing demand for automotive intelligence and personalization,how to realize efficient software reuse and unified maintenance while ensuring the diversification of vehicle functions has become an important challenge for the automotive industry. In this paper,the concept of Car Config Parameter(CCP)is proposed,and the implementation process of CCP in software development is introduced in detail,including the definition of configuration parameters,the receiving and checking of messages,the implementation of diagnostic codes,and the selection of advanced functions and steering feel. Finally,CCP configuration parameters were sent to the steering system by CANoe for simulation and verification. The results show that the design can realize dynamic loading of configuration parameters and function switching effectively,and can report the diagnostic fault code as expected.
【Key words】vehicle configuration parameters;DTC;advanced functions;tuning parameter
汽车转向系统作为车辆操控性的核心组成部分,无疑是连接驾驶员意图与车辆行驶方向的桥梁,更是确保行车安全、提升驾驶体验的关键[1]。随着汽车技术的不断进步,现代汽车转向系统还融入驾驶辅助功能的集成,进一步提升了驾驶的便捷性和舒适性。在快速发展的汽车行业中,随着消费者对车辆功能多样化与个性化需求的日益增长,汽车制造商面临着如何在保持成本效益的同时,提供高度定制化产品的挑战[2]。本文提出CCP设计,作为EPS与上位机高级功能交互实现的桥梁,通过预设一系列配置参数,允许制造商在不改变软件主体架构的前提下,灵活调整车辆的功能配置,使得同一版本的软件能够适配不同配置级别的车型。这种设计策略不仅提高了软件的复用度,降低了开发成本,还加速了新产品的上市速度,满足了市场快速变化的需求。
1 CCP的功能设计
1.1 概述
转向系统的车辆配置参数CCP(Car Config Parameter)是连接车辆中央控制单元与电动助力转向系统(Electric Power Steering,EPS)的桥梁,该软件通过接收整车中央控制模块发送的车辆参数信号,通过高效解析并响应来自整车控制系统的参数信号,实现了在不触动底层软硬件架构的前提下,灵活调整EPS系统的操控手感曲线,极大地增强了驾驶体验的个性化与适应性。更为重要的是,CCP软件还赋予了车辆转向系统更高级别的功能配置能力,如车道保持辅助(Lane Keeping Assist,LKA)、自动泊车系统(Automatic Parking System,APS)[3]等智能化功能的兼容性验证与启用,为现代汽车智能化、自动化发展提供了坚实的软件支持。这种灵活性与可扩展性,使得CCP能够紧密跟随并满足原始设备制造商(OEM)日益增长的车辆功能定制化需求,通过模块化设计,轻松适应不同车型与市场的独特要求。
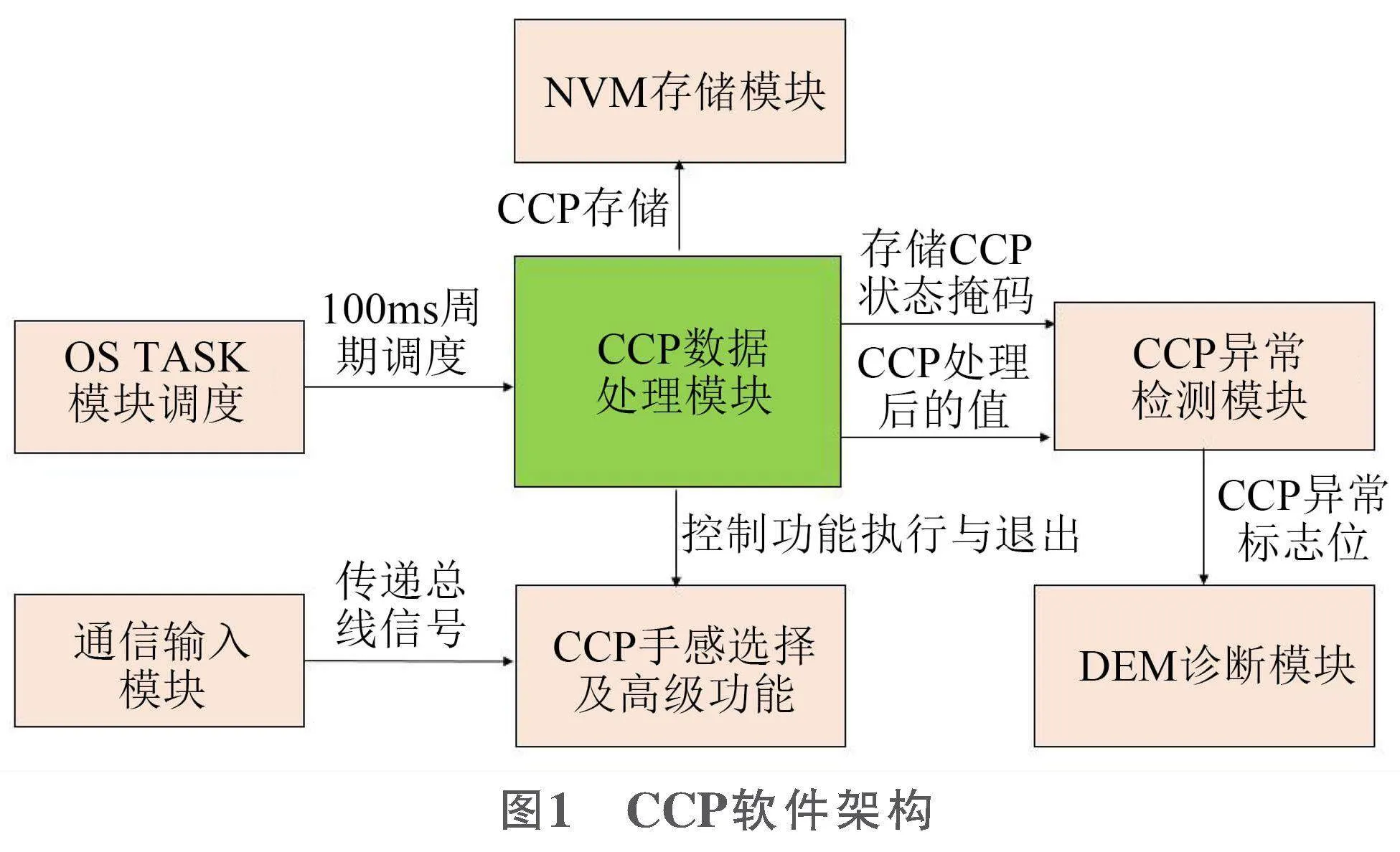
在技术实现层面,CCP软件的核心功能架构主要由3大模块构成:①CCP数据处理及数据存储模块,负责接收、解析并存储来自整车控制节点的数据信息,为后续的配置调整与功能实现提供精准的数据支撑;②CCP异常检测模块,作为系统稳定运行的守护者,实时监控数据流动与功能执行状态,及时发现并报告潜在故障或异常,确保转向系统的安全性与可靠性;③CCP高级功能及手感选择模块,则是实现个性化定制与高级功能配置的关键,让用户或OEM能够轻松选择适合的操控手感曲线,并验证、激活车辆转向系统的高级辅助驾驶功能。CCP软件架构如图1所示。
1.2 CCP功能设计
1.2.1 CCP数据格式
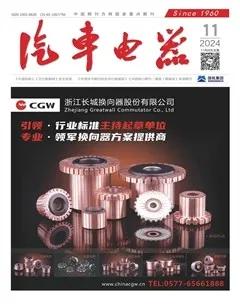
每个CCP大小为1Byte,254个可能的十六进制数(除了0x00和0xff),CCP数据包含在VddmChas1Fr30(ID:0x250)和VddmChas1Fr33(ID:0x3F7)两帧报文中。以VddmChas1Fr30报文数据为例进行解析,CCP与Tuning车型匹配关系见表1。
CCFReqMsg(ID:0x250)包含CCP1-504的信号,其对应的位置解析计算方法:BlockID#=int[(CCP#+6)/7]、BytePos#=CCP#-(BlockID#×7-6)+2。
例如报文为:47 00 00 00 02 00 00 00,BlockID#=0x47、BytePos#=5,可以计算出对应的CCP ID=494。这个CCP号在软件中定义为yeeHighwayAssist_xdu8,含义为高速行驶的车道保持。
1.2.2 CCP信号处理
从总线上接收报文,对数据进行有效性检查,判定是否在CCP预先定义好的有效范围内,如果都在有效值范围内,则本次点火循环接收到的这组CCP信号有效;如果不在有效值范围内,并且不能为0xff,则使用damos_nv来记录无效值,更新对应位置掩码为0用来报码,而后将这些掩码传递给CCP异常检测模块。CCP信号处理如图2所示。
1.2.3 CCP信号存储
CCP模块在校验完成所有数据之后,通过CarConfig_ Write()API将CCP信号参数存储到NVM。当下个点火周期上电后,DCMNvDataI_RE_CarConfig()API将上个点火循环存储的CCP参数同步到CCP模块中。
1.2.4 CCP报码设计
在CCP功能中根据从节点的ECU是否有完整接收并评估过所需支持的CCP参数,将ECU分为以下两种状态。
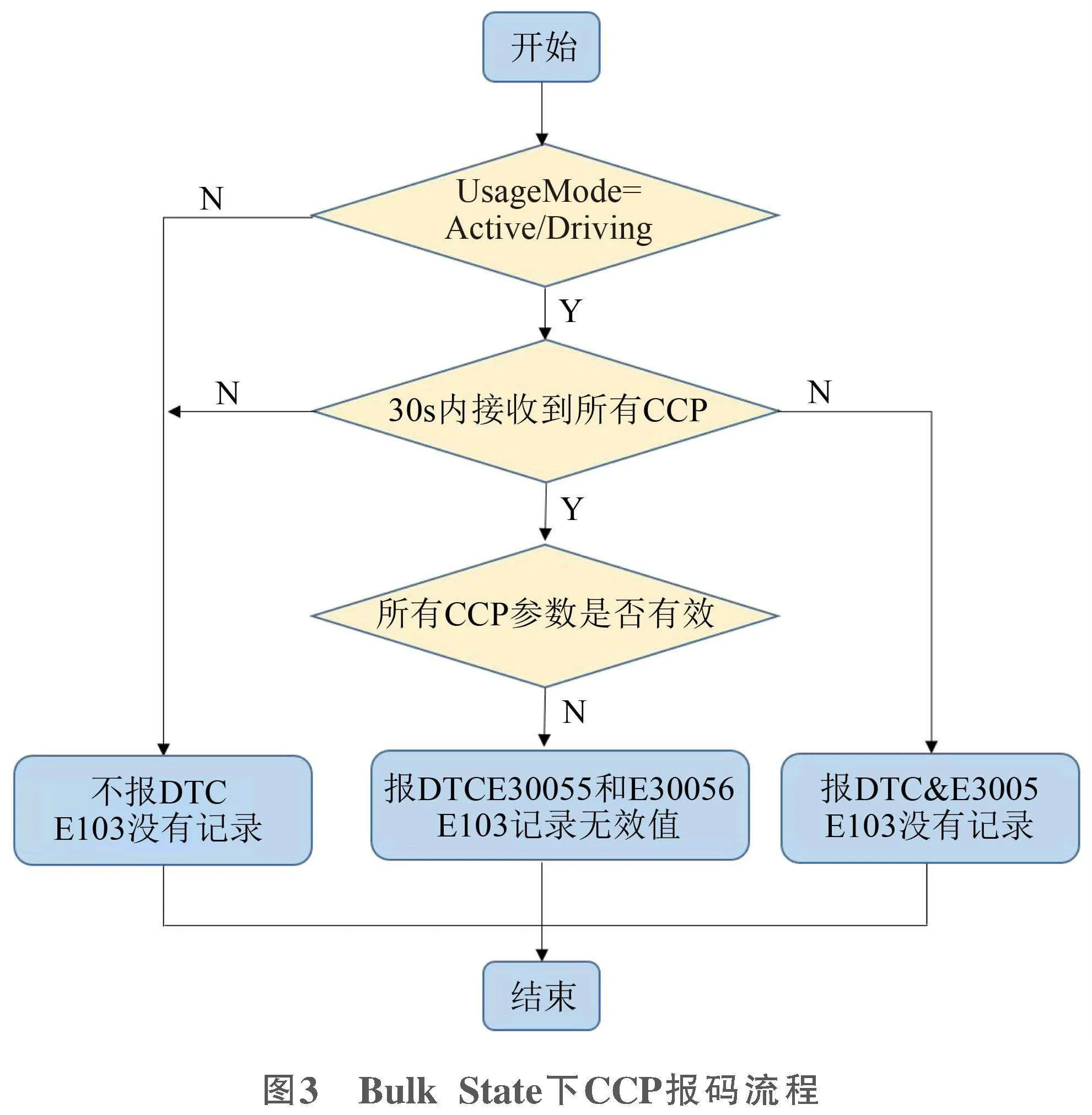
1)Bulk State。未经编程的ECU,即空件,没有配置过CCP参数值。如果接收到的CCP参数完整性没问题,但是有效性错误,那么会报出DTC E30055和E30056,同时会记录无效CCP值。如果接收到的参数不完整,则会报DTC E30056。通过DID E103可以获取记录的无效值。报码流程如图3所示。
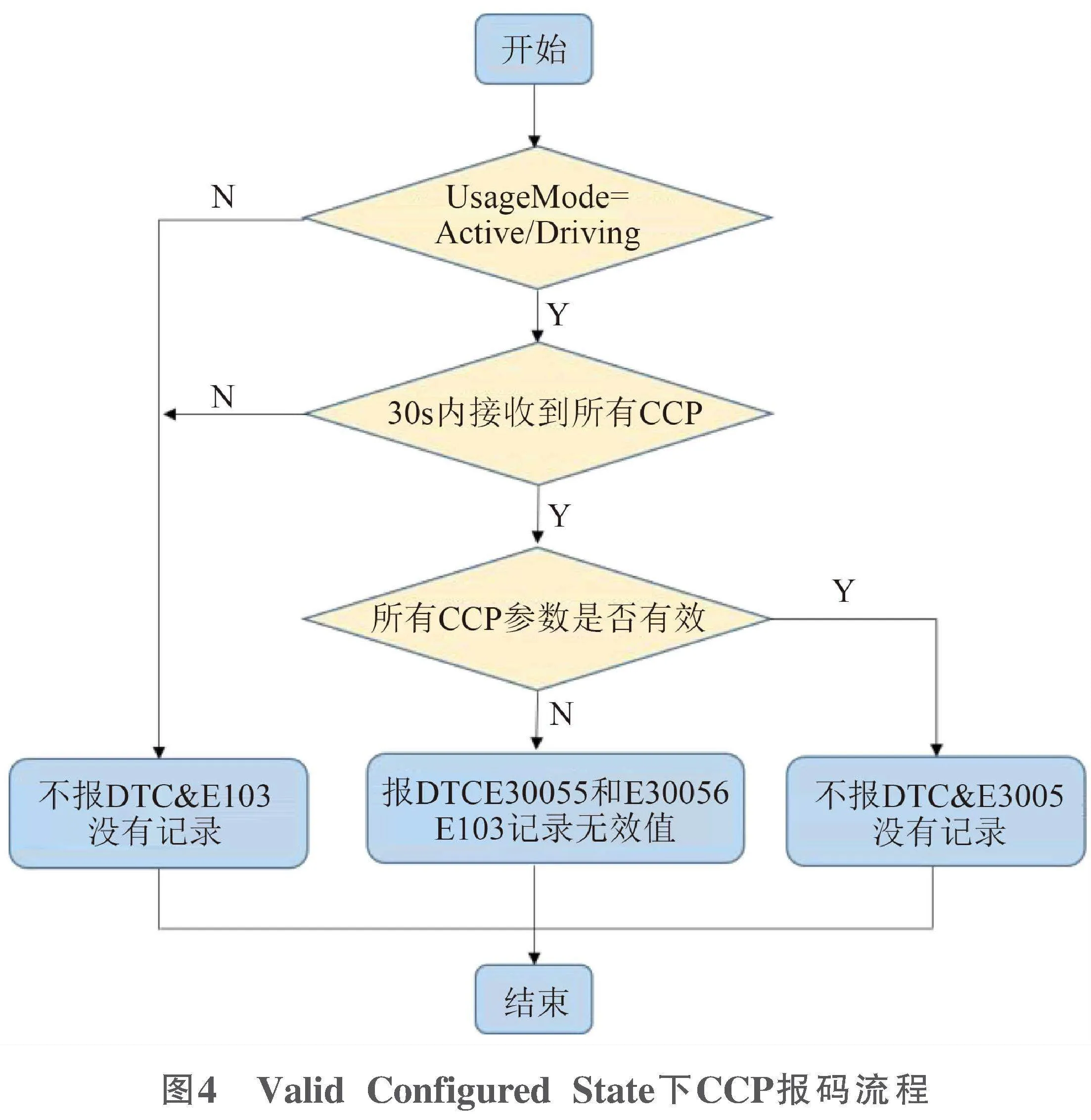
2)Valid Configured State。所有预期/允许的CCP值都在使用中,并且所有值已经至少被评估一次,且是有效的。在此状态下,仅用于检测车辆配置的可能变化。只有在满足接收数据的完整性且存在无效数据的情况下,才会报DTC E30056并且DID E103会记录无效CCP数据。报码流程如图4所示。
两种状态之间的转换如图5所示。刚出厂的EPS从未配置过CCP参数处于Bulk State(初始状态)。整车每次上电30s内,EPS接收来自中央控制器的所有CCP参数,并且在判断这些参数全部有效后,下KL15电,使接收到的有效CCP参数存到EPS控制器NVM内,完成这些操作后,EPS便进入Valid Configuration State(有效配置状态)。而想要从Bulk State状态进入Valid Configuration State,只能通过清除NVM内的CCP有效值来还原Bulk State状态。
通过DID E103可以进行无效参数读取,如果CCP软件识别到当前驾驶循环整车中央控制器发送的CCP参数为无效值,则把无效参数赋值damos_nv,并且由CCP数据处理及数据存储模块将这些值存入NVM,使OEM可以通过诊断服务$22来随时读取无效值,有利于故障诊断。
1.2.5 CCP高级功能使能
目前EPS所支持的常见的高级功能,如自动泊车、车道保持、紧急避让以及自动驾驶相关的功能等,这些功能的开启需要CCP参数输入Enable/Disable相应的高级功能。
EPS上电后,从NVM中获取上个点火循环存储CCP参数值,判断这些值是否为有效值,且不等于0xff,条件满足即使能相应的高级功能,这个过程在上电的500ms内即可完成。CCP参数使能高级功能逻辑如图6所示。
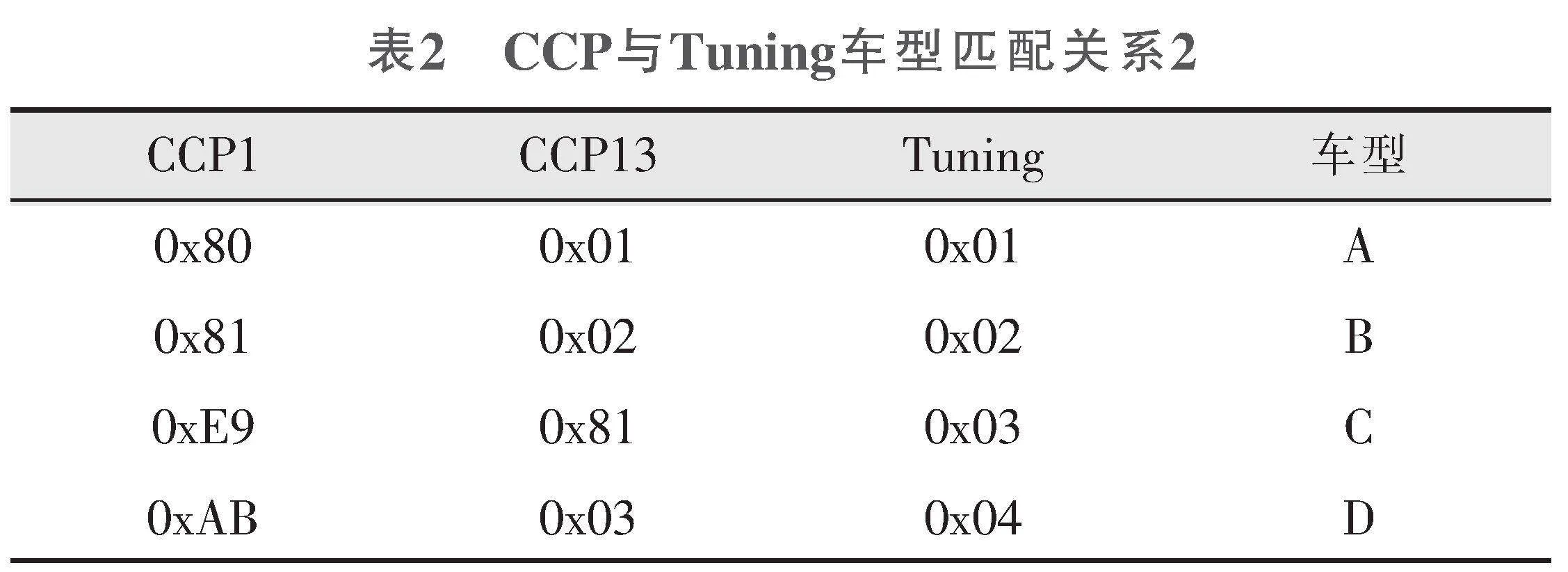
1.2.6 CCP参数选择Tuning曲线
为了满足同一版软件支持不同车型的手感曲线,在定义的很多CCP参数中,使用CCP1和CCP13来共同作为车型区分。CCP与Tuning车型匹配关系见表2。
2 测试验证
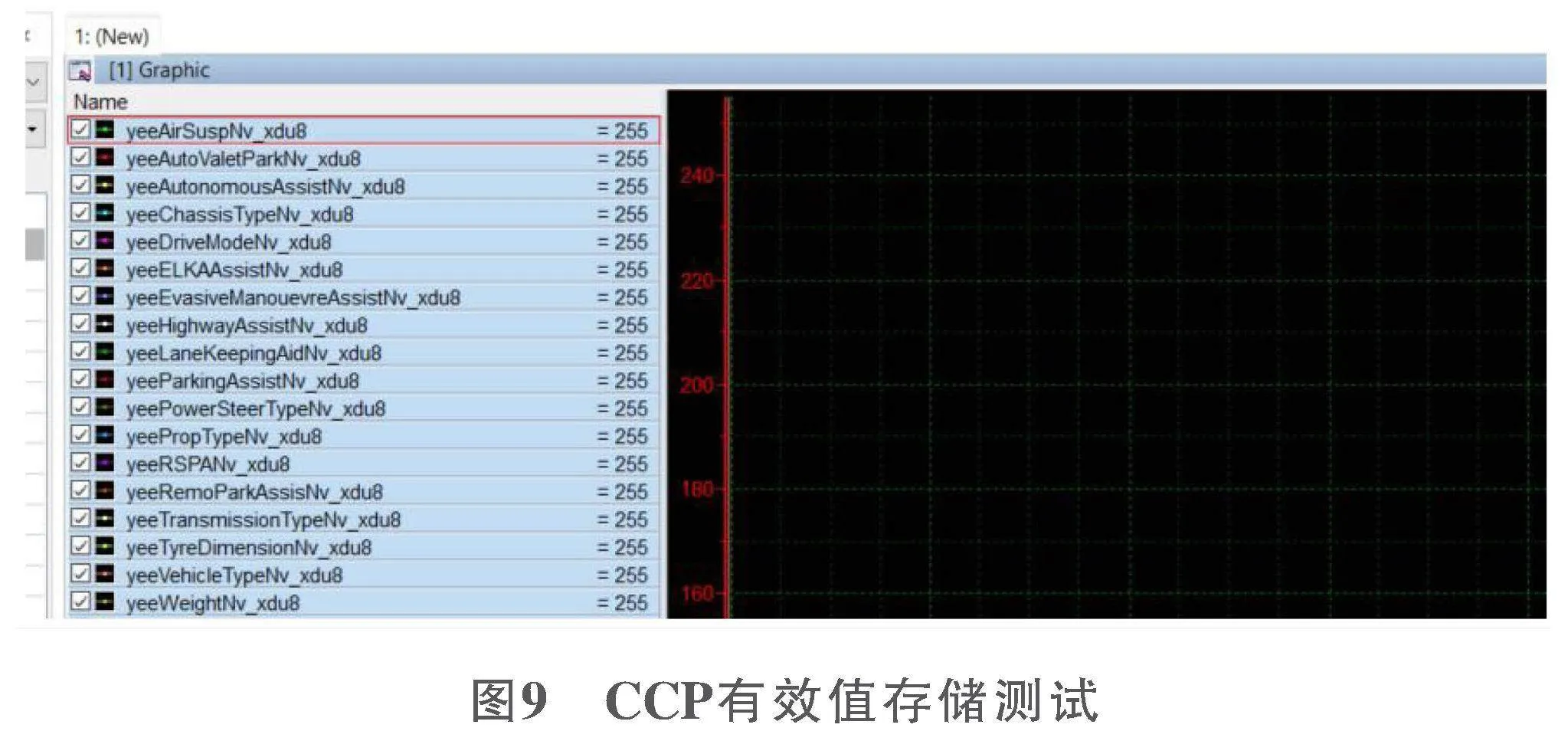
前文中对CCP的功能进行了设计实现,需要进行试验验证。发送端采用CANoe和Panel界面建立仿真模型。图7为CAPL语言的CCP配置参数,图8为整车仿真工程。
测试的总体步骤为:车辆的驾驶模式切为usgModActv,向总线发送CCP参数,等待30s后,K15下电存储CCP的参数值,然后再次上电。
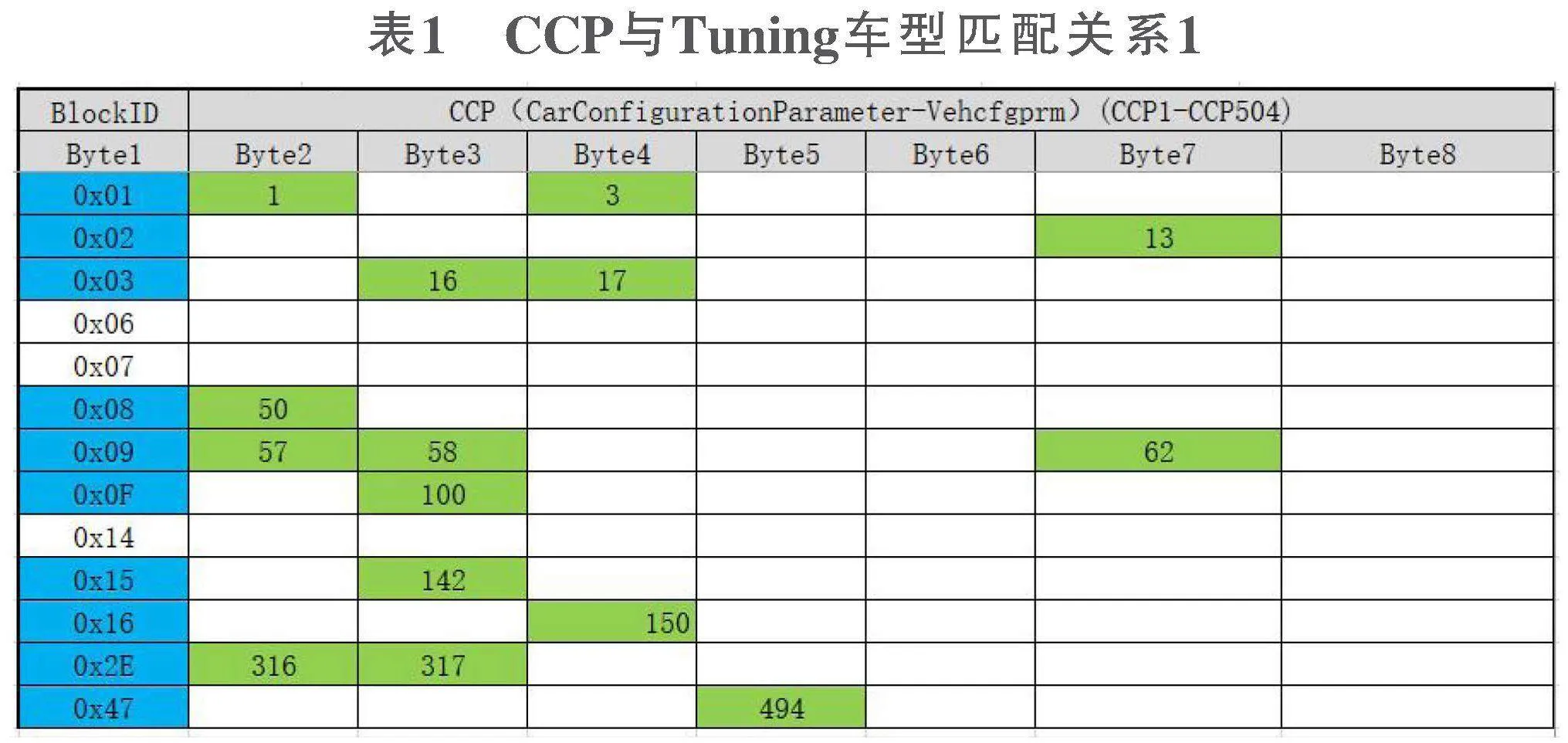
1)CCP有效值存储测试:CCP参数全配为有效值,观测CCP对应内部的damos值均为有效值,对应的damos_nv=255,并没有报DTC。如图9所示。
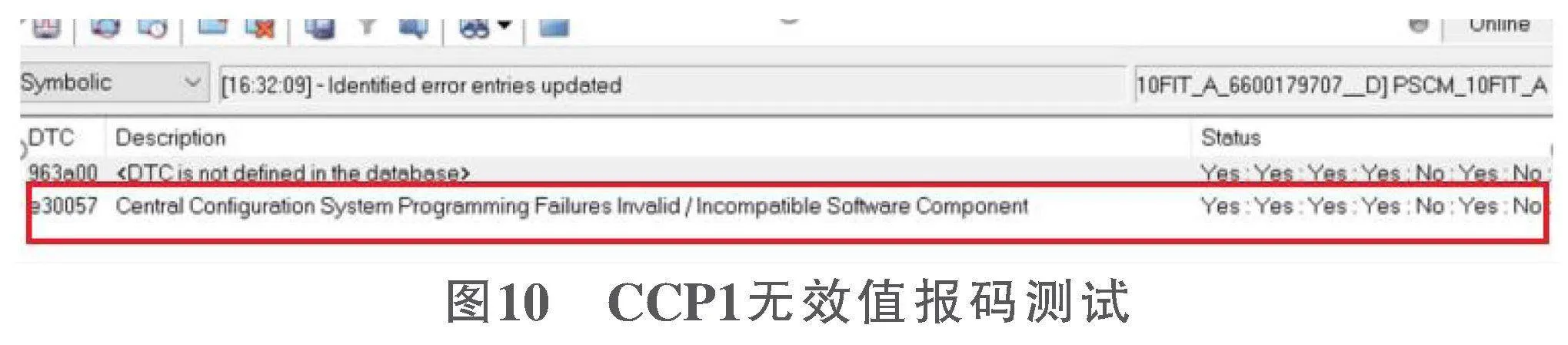
2)CCP1无效值报码:当发送无效CCP1时,对应的damos_nv记录无效值,并且报30057,上电后接收到的CCP1 Vehicle Type不在有效值范围内。如图10所示。
3)在Bulk State之下发送无效CCP值时,对应的damos_nv记录无效值,并且报E30055和E30056。如图11所示。
4)在Valid Configured State下发送无效CCP值时,对应的damos_nv记录无效值,并且报E30056。如图12所示。
经过上述的测试,本文第2章的设计方法合理,能够对CCP的参数配置有效的存储和报码。
3 结束语
本文详细阐述了汽车转向系统的车辆参数配置设计方法,涵盖了CCP数据处理、存储以及异常检测等方面内容,并进行了详细的测试。测试结果表明,该设计能够成功实现相关功能,大大提高了软件对车辆的兼容性。
参考文献:
[1] 费二威. 电动助力转向系统匹配研究[D]. 长春:吉林大学,2014.
[2] 陈炜. LKA车道线感知功能的安全评价方法研究[D]. 天津:天津科技大学,2023.
[3] 陆柏霖. 智能汽车自主泊车系统的路径规划及跟踪控制研究[D]. 长春:长春工业大学.