串联再生制动策略下考虑力矩分配的电动汽车联合仿真分析
2024-12-09李敏韦宏洋邓飞骏






【摘 要】以某新能源电动汽车为原型,对车辆进行解析后,使用Cruise搭建车辆模型,并基于MATLAB/Simulink平台搭建考虑前后轴制动力矩分配的串联再生制动控制策略,通过C++编译器编译成dll文件进行联合仿真,分析模型车辆在NEDC工况的运行结果。结果表明,在NEDC工况下运行,车辆运行稳定,制动效果和再生制动能量回收情况良好,可为车辆再生制动优化提供参考和借鉴。
【关键词】串联再生制动;电动汽车;Cruise;Simulink;仿真
中图分类号:U469.72 文献标识码:A 文章编号:1003-8639( 2024 )11-0005-03
Modeling and Simulation Analysis of Electric Vehicles Considering
Torque Distribution Under Series Regenerative Braking Strategy*
【Abstract】Taking a new energy electric vehicle as the prototype,after analyzing the vehicle,Cruise was used to build the vehicle model,and a series regenerative braking control strategy considering the braking torque distribution of the front and rear axes was built based on the MATLAB/Simulink platform,which was compiled into dll files by C++ compiler for co-simulation. The operation results of model vehicle in NEDC condition were analyzed. The results show that the vehicle runs stably under NEDC conditions,and the braking effect and regenerative braking energy recovery are good,which can provide reference for vehicle regenerative braking optimization.
【Key words】series regenerative braking;electric vehicles;Cruise;Simulink;simulation
0 引言
为了减轻环境污染和能源短缺,中国积极推进电动汽车技术发展[1]。电动汽车驱动电机不仅能作为驱动装置为车辆行驶提供驱动力,在车辆需要减速时,还能够作为发电机为电池反向充电,由此可提升电动汽车能量利用效率,增加续航里程[2]。目前,通过仿真试验可以降低研发成本,帮助优化汽车的性能,提升车辆设计可靠性,为整车生产制造提供试验依据。Cruise功能强大,是汽车制造领域应用广泛的仿真工具,提供了MATLAB/Simulink接口模块,使工程师能够方便地开发复杂的控制算法。Simulink被广泛应用于汽车控制系统的开发和验证。工程师可以通过图形化建模的方式,快速构建复杂的控制系统模型进行仿真分析和优化。
电动汽车制动时,前后轴制动力分配是非常重要的设计因素。本文通过Cruise-Simulink搭建了联合仿真平台,构建了车辆等效模型,与考虑车辆前后轴力矩分配的串联形式再生制动控制策略进行联合仿真,并验证车辆控制策略模型的可靠性,能够为优化再生制动控制策略,提升电动汽车能量效率提供试验依据。
1 建模过程与方法
1.1 电动汽车模型搭建
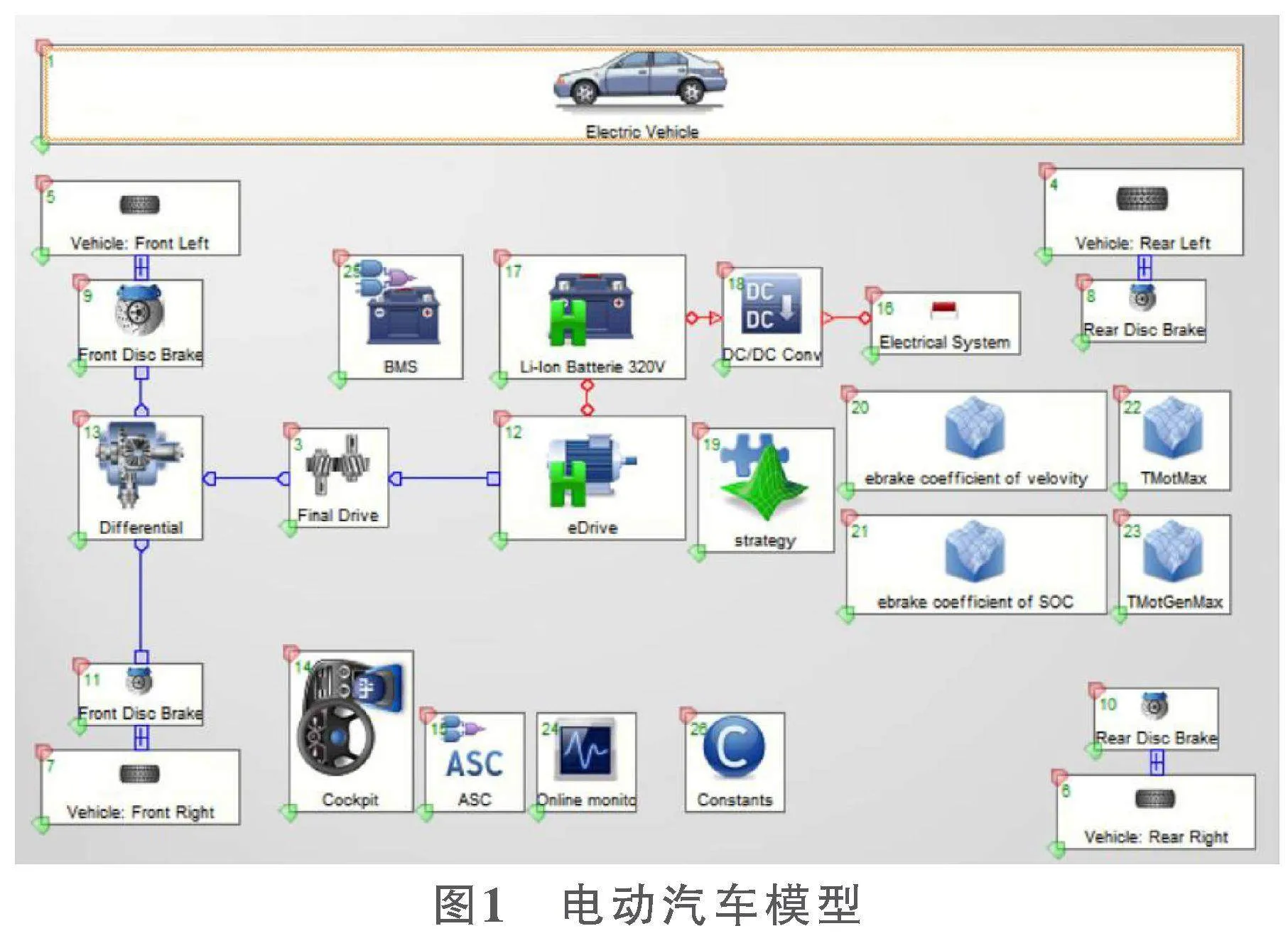
通过查阅原型车辆手册、试验、测量得到车辆的数据,在Crusie中搭建车辆的等效模型,如图1所示。在不考虑能量回收时,经济性能表现为:在NEDC工况下,车辆总能耗49.838kW·h,可行驶309.971km,电动燃油经济性为6.2196km/(kW·h);动力性能表现为:全负荷加速,模型车辆0—100km/h加速时间为7.38s;制动性能表现为:模型车速100km/h时,施加制动力100N,车辆制动距离32.32m。模型车辆结构合理,动力性、经济性和制动性能均能满足要求。
1.2 再生制动控制策略搭建
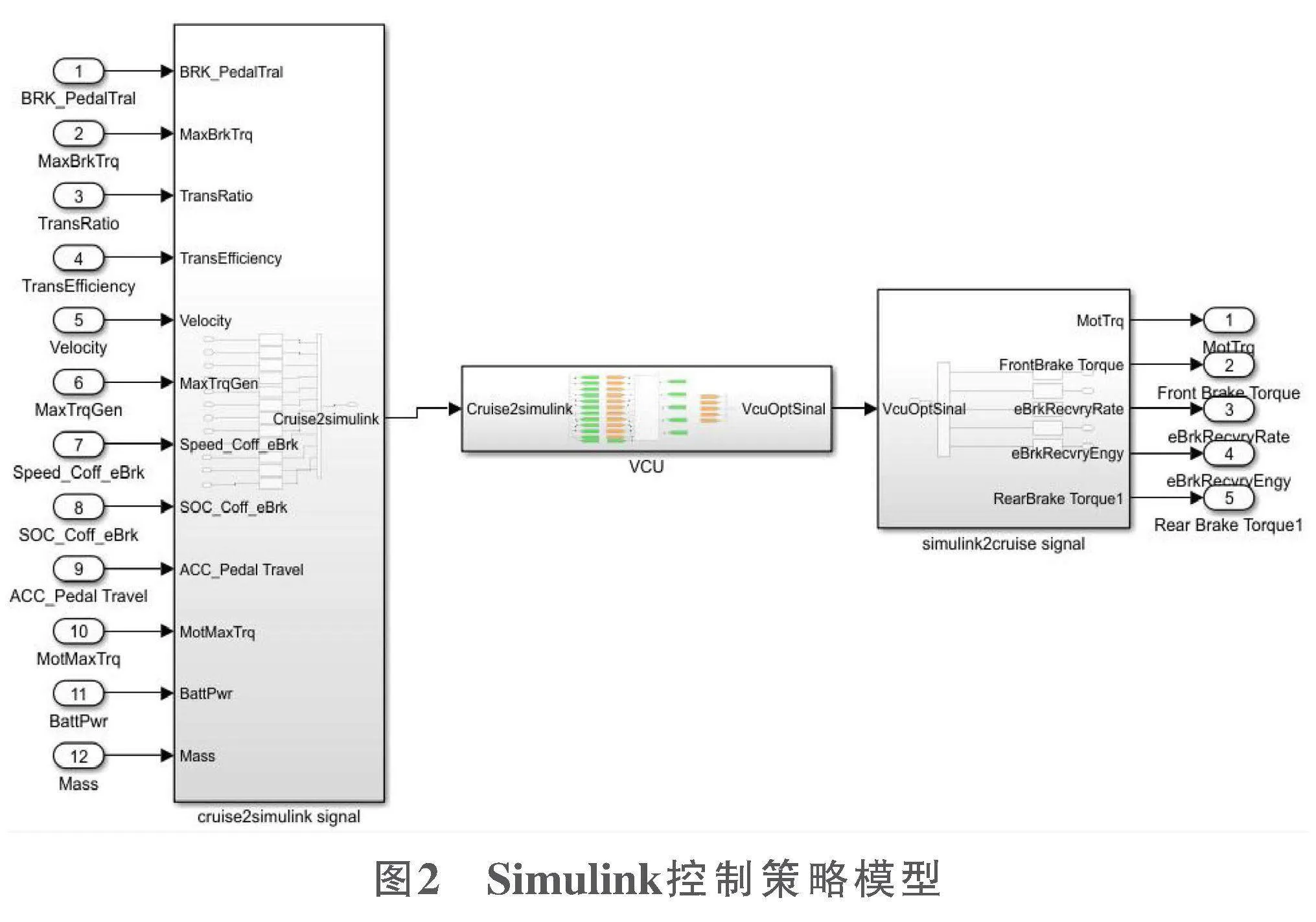
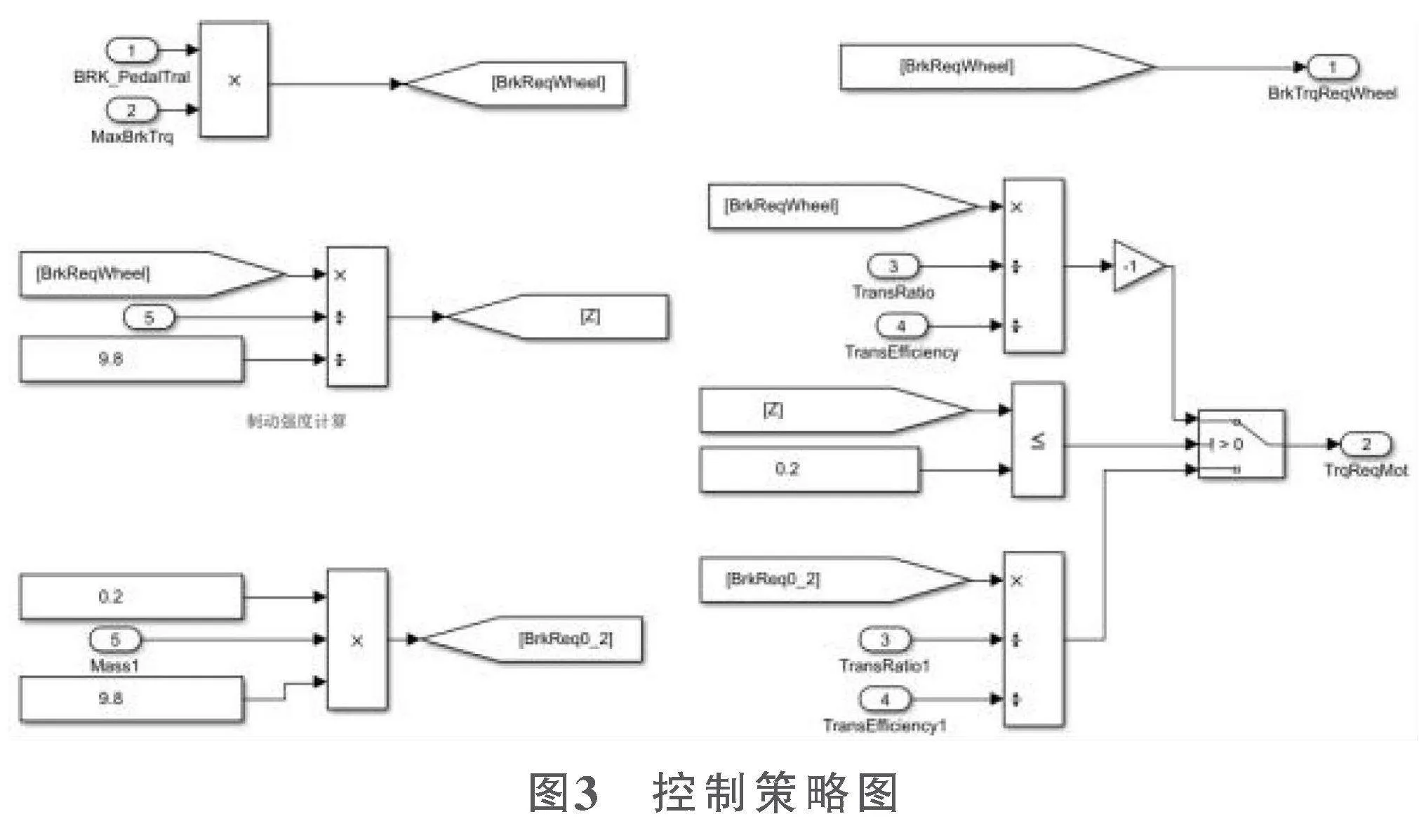
将Criuse中的信号作为输入,在Simulink计算后输出,控制策略模型如图2所示,接口信息见表1、表2。通过试验分析,原型车辆采用串联式再生制动控制策略。在这种控制模式下,当车辆开始制动时,制动力较小,电机的再生制动力会提供整车制动力。随着制动踏板的开度增加,电机的制动力也会随着增加,直到达到电机最大输出转矩。达到最大输出转矩后,电机提供的制动力不再改变。此时,机械制动系统会介入,并继续提供制动力,并随着制动踏板的行程增加而相应增加。这种控制策略优先利用电机制动,可以最大程度地提高电制动能量回收效率[3]。因此,本文设计制动踏板开度在≤0.2时,完全由电机进行电制动;制动踏板开度>0.2时,由电制动和机械制动进行复合制动。控制逻辑如图3所示[4]。
1.3 前后轴制动力矩分配
通过合理分配前后轴制动力,可以保持电动汽车在制动时的稳定性和平顺性。通过控制前后轴制动力的分配比例,可以避免车辆在制动时出现侧滑或甩尾等情况。原型车辆是前驱车辆,根据电动汽车的特性进行设计和调整,以确保最佳的经济性和制动性能。
本文考虑了车辆前后轴机械制动扭力分配。图4是制动过程中车辆的受力图,已忽略了滚动阻力和空气阻力,且不考虑车轮边滚边滑情况,对后轮和前轮接地点分别取力矩得[5]:
FZ1=FZ10+Z×G×Hg / L
FZ2=FZ20+Z×G×Hg / L
式中:FZ1、FZ2——前后轴动轴荷;G——汽车重力;Z——制动强度;L——轴距;Hg——质心高度;FZ10、FZ20——前后轴轴荷。
由力的平衡条件得:
Fzb1+Fzb2=G×Z
式中:Fzb1、Fzb2——地面作用于前后轮的制动力;a——质心至前轴中心线的距离。
设前后轮与地面附着系数为φ1、φ2得到:
Fzb1=φ1×FZ1,Fzb2=φ2×FZ2
将前轴轴荷与后轴轴荷之比定义为理想制动力比β:
将车辆参数代入上式可得到模型车辆前轴、后轴制动力矩约为0.65和0.35,即在不考虑电机制动时,机械制动的前后轴制动力力矩按照0.65、0.35进行分配,并在Simulink中搭建制动力分配控制策略图,如图5所示。图中整车制动扭矩需求=制动踏板开度×整车最大制动扭矩;前轮需求扭矩=整车制动扭矩需求×前轴分配系数(0.65)÷2,后轮需求扭矩=整车制动扭矩需求×后轴分配系数(0.35)÷2。
2 试验结果分析
2.1 NEDC循环工况
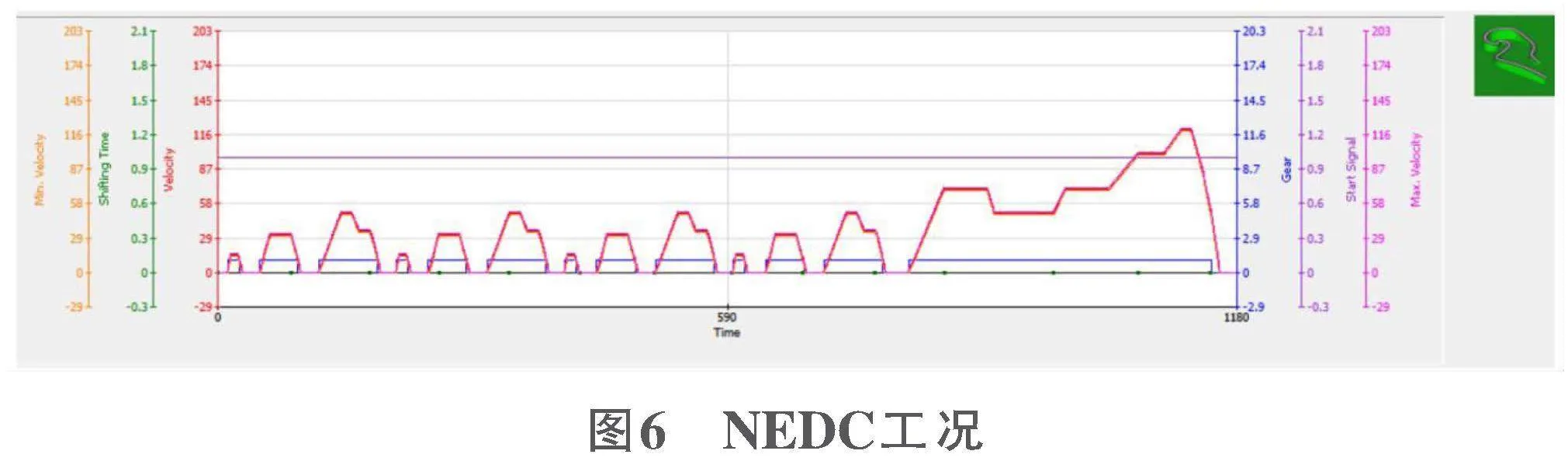
NEDC是新欧洲行驶循环(New European Driving Cycle)的缩写,可用于评估电动汽车的续航里程和能源效率。在NEDC工况(图6)下,电动汽车会根据规定的速度和加速度模式进行测试,以模拟城市和郊外环境的驾驶情况。通过测试,可以得出电动汽车在理想驾驶条件下的续航里程和能源效率数据,帮助消费者和政府监管机构了解电动汽车的实际性能。通过Cycle Run-NEDC循环工况对模型车辆行驶里程进行仿真计算。
2.2 运行结果
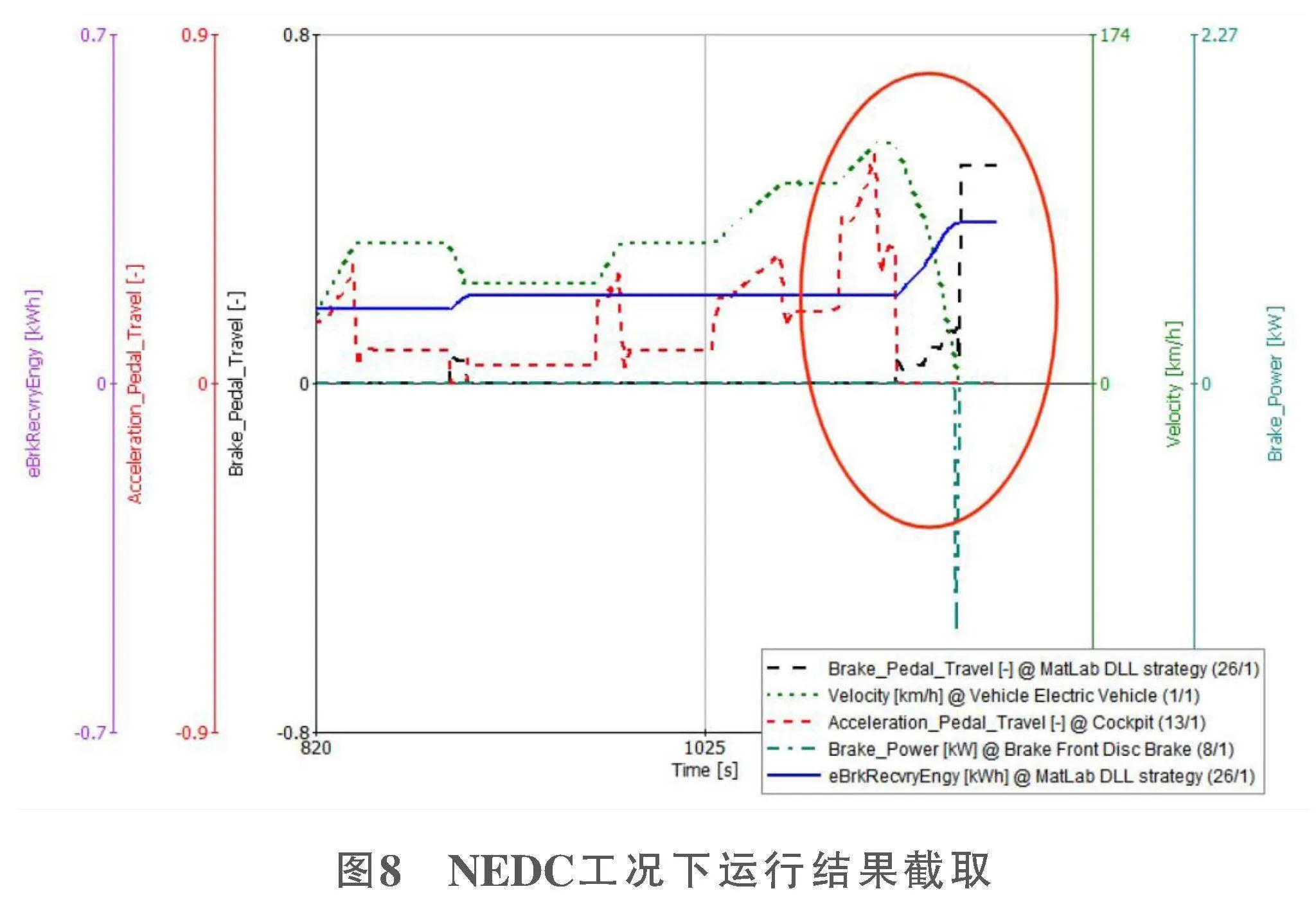
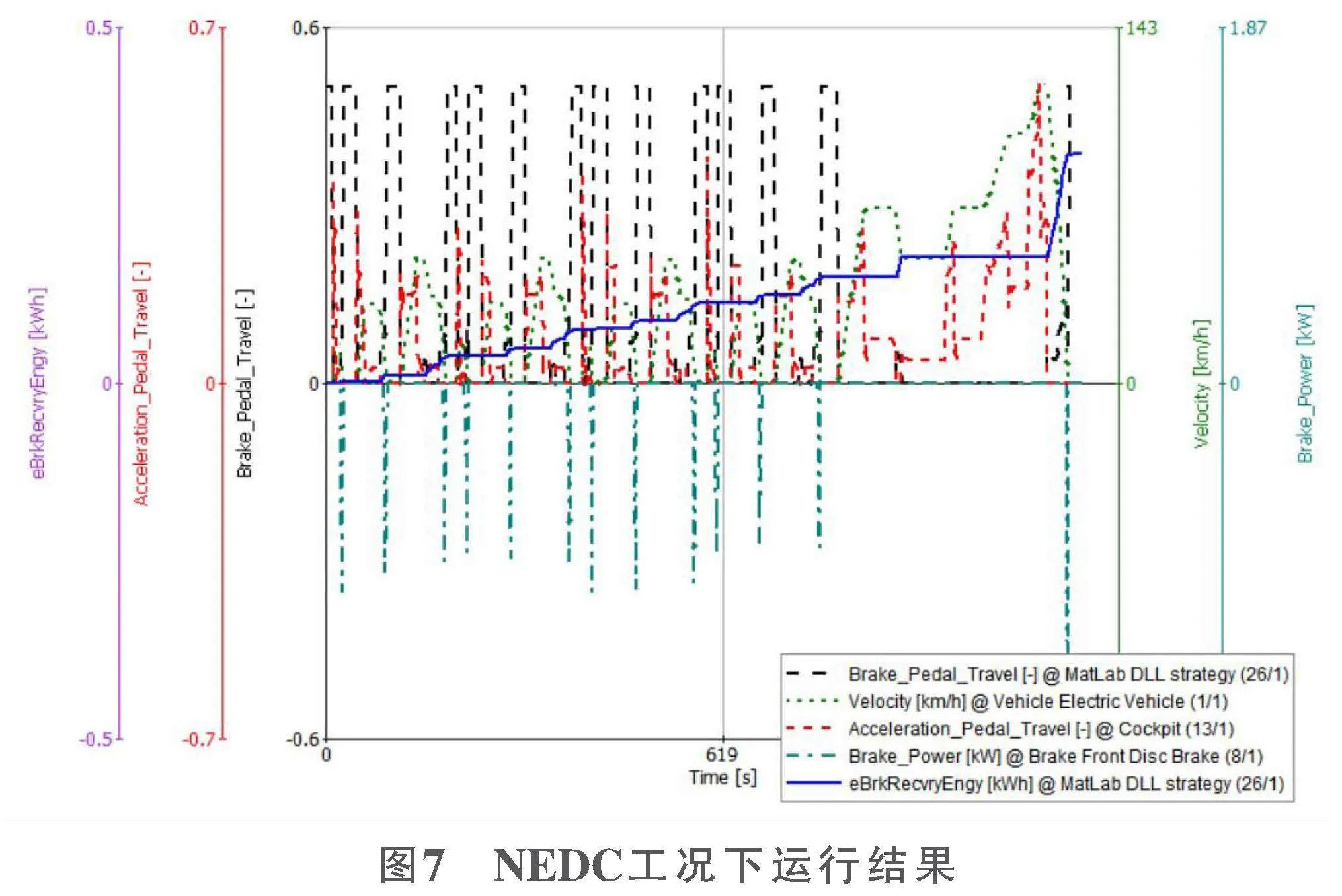
将制动踏板开度(Brake_Pedal_Travel)、车速(Velocity)、加速踏板开度(Acceleration_Pedal_Travel)、制动能量(Brake_Power)、再生制动回收能量(eBrkRecvryEngy)作为目标数据放入到坐标图中,如图7所示。节选部分数据(图8)进行分析,在时间区域内,车辆运行情况大致可分为两个阶段:第1阶段,当车速为120km/h时,松开加速踏板,车辆在电动机再生制动力矩的作用下减速运动,再生制动回收能量迅速升高;第2阶段,随着制动踏板开度增加到>20°时,机械制动介入,踏板开度达到峰值时,车速逐渐降至0km/h。
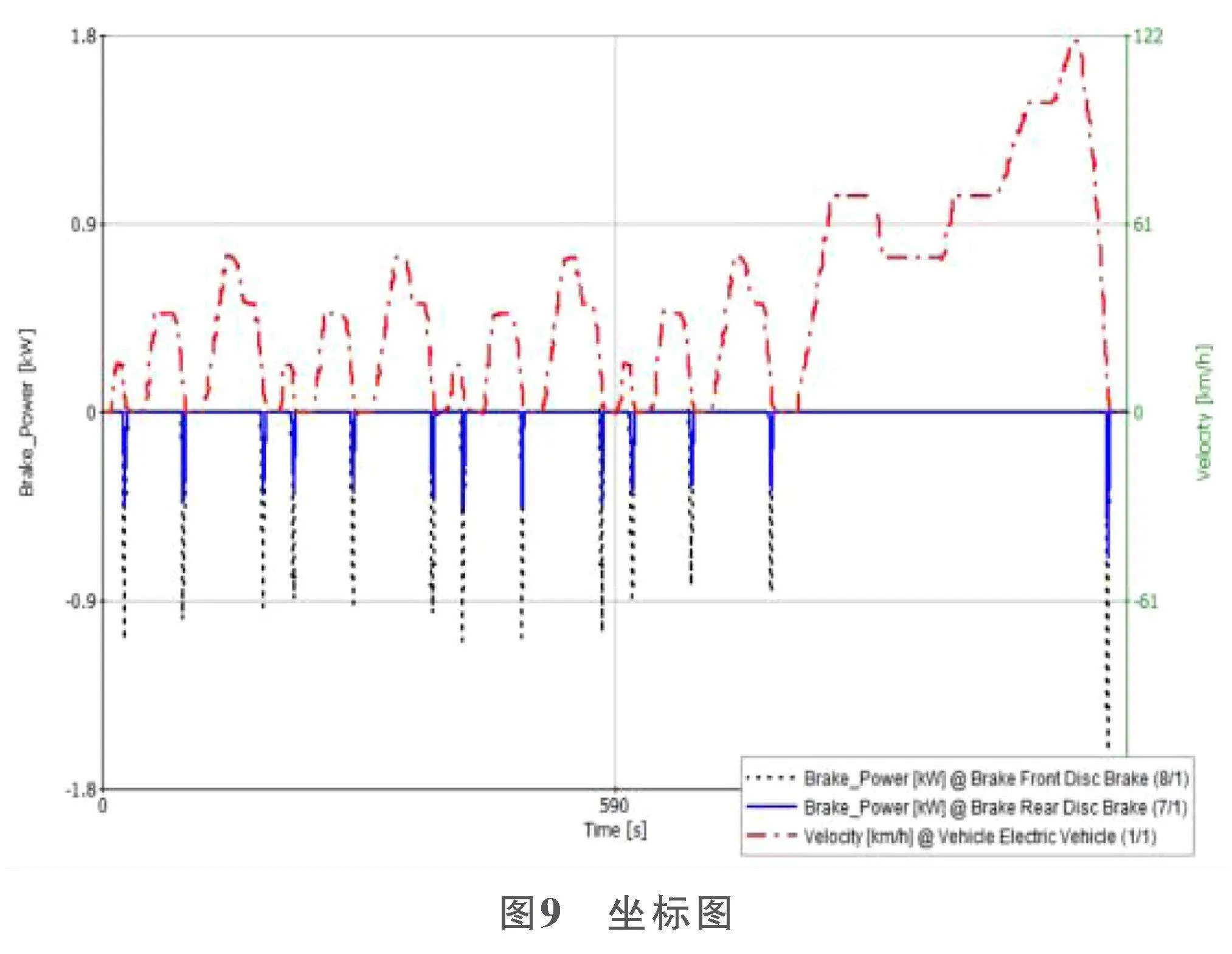
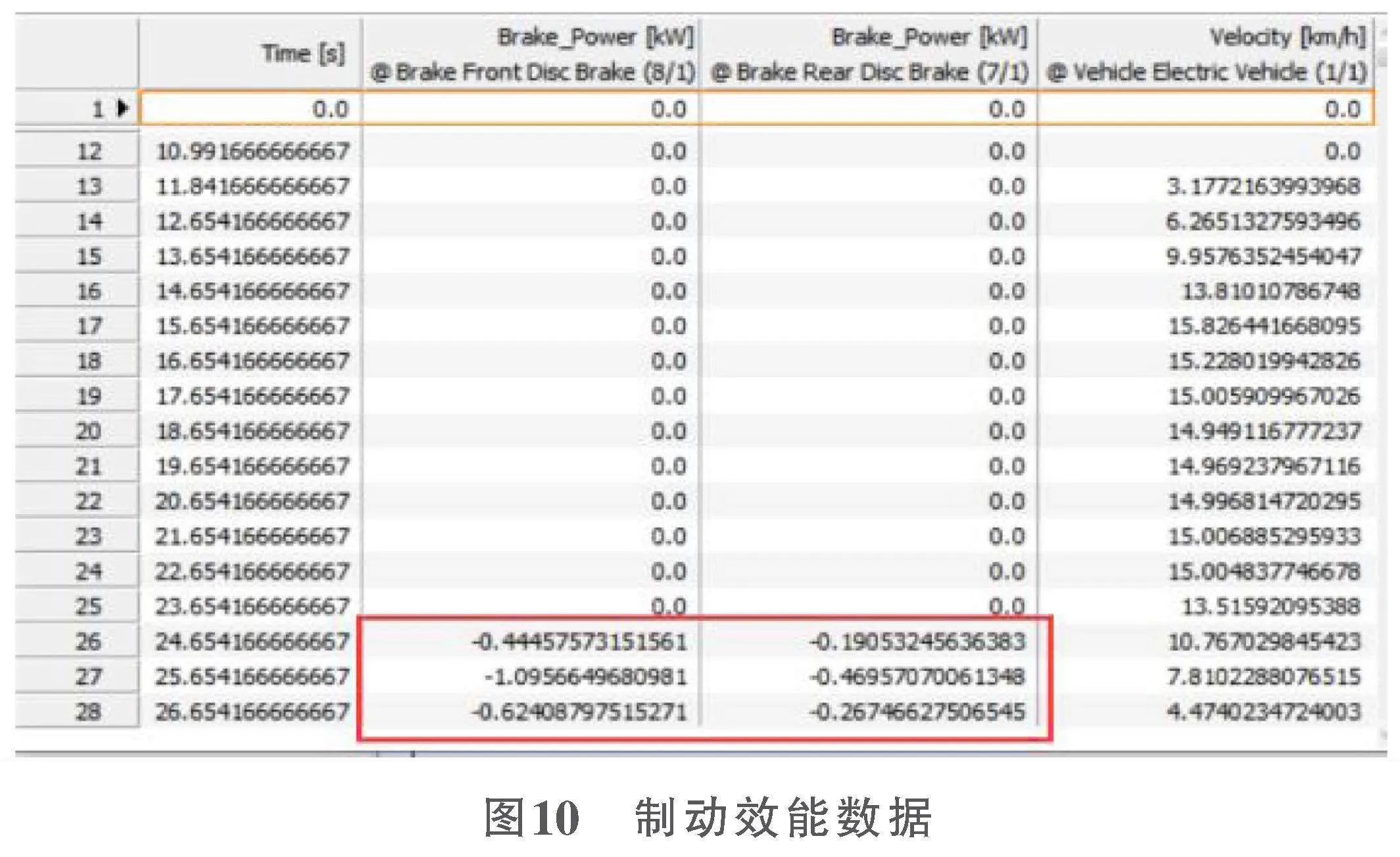
制动前轴、后轴制动力矩分配按照0.65∶0.35的比例进行分配,将车速(Velocity)、前轴制动能量(Brake Front Brake Power)、后轴制动能量(Brake Rear Brake Power)放到坐标图(图9)中,前后轴制动力矩按照比例进行分配,制动效能数据如图10所示。
3 结束语
电动汽车制动时,前后轴制动力分配是非常重要的设计因素,前后轮制动力矩分配不均衡容易导致车辆在制动时出现侧滑、失控。本文在Cruise-Simulink环境下搭建了串联再生制动控制策略并考虑前后轴制动力分配的电动汽车等效模型,验证了模型的制动效果、制动力分配情况和能量回收情况。结果表明,在NEDC工况下运行,前后轴制动力矩按照0.65∶0.35进行分配,车辆运行稳定,制动效果和再生制动能量回收情况良好,可为车辆再生制动优化提供参考和借鉴,为电动汽车的参数选择以及结构优化提供依据。
参考文献:
[1] 孟泽文,张铁柱,张洪信,等. 后驱式纯电动车再生制动控制策略研究[J]. 青岛大学学报(工程技术版),2020,35(1):65-71.
[2] 张庆良,赵树国. 基于ADVISOR的电动汽车再生制动控制策略改进[J]. 邯郸职业技术学院学报,2022,35(3):44-49.
[3] 王智明. 纯电动车再生制动控制策略优化研究[D]. 秦皇岛:燕山大学,2023.
[4] 王浮生不怕生. Cruise+Simulink联合仿真建模-纯电动汽车串联制动回收策略的实现[EB/OL].(2023-04-23)[2024-06-18]. https://blog.csdn.net/WangFS_bps/article/details/130322581.
[5] 何宇平,朱伯比,余志生. 轿车前后轴轴间制动力矩分配的设计[J]. 兵工学报(坦克装甲车与发动机分册),1992(4):28-36.
