无人机航空摄影测绘精度敏感性分析
2024-12-06张圣海



摘 要:为了探讨无人机航空摄影测绘的精度敏感性,本文统计并分析了无人机测绘的观测点误差范围、观测点的平面和高程均方根误差以及测量工作总用时等指标,评价了无人机航空摄影测绘的精度和效率。研究结果显示,无人机测量方法的系统误差较小,误差分布较为集中,没有出现明显的异常值。无人机航空摄影测绘是一种建立三维模型的有效方法,其精度满足规范要求,在工作总用时方面优势明显。
关键词:无人机;测绘;精度分析
中图分类号:P 231" " " " " 文献标志码:A
无人机航空摄影测绘技术发展迅速,在航空摄影测绘领域具备许多优势,但是其精度问题一直是研究者关注的焦点[1]。精度敏感性分析是评估无人机航空摄影测绘精度并识别影响因素的重要手段[2]。杨帆等[3]对比了不同无人机航测影像处理方案的效果,单独控制点影像处理效果最好,优化POS(定位定姿系统)结合控制点影像处理效果较好,原始POS数据影像处理效果最差。盛海泉等[4]研究了无人机航测技术在土石方测量项目中的应用,采用大疆禅思云台系统进行航摄,得到了高精度、高分辨率的实景三维模型。宫晓春等[5]介绍了基于差分全球导航卫星系统(Global Navigation Satellite System,GNSS)无人机航测系统在输电线路勘灾方面的应用,通过事后差分解算获取较高精度的POS数据。
本文比较了无人机航测和传统测量在测量精度以及测量效率方面对地形测绘工作的影响,为无人机航空摄影测绘提供更加精确、可靠的数据。
1 工程概况
本文以某县公园入口处的一个试验区作为研究对象。该试验区位于海拔约1 600 m的高原地带,平均坡度为3.5%,地形呈现由西向东南逐渐降低的台地状特征。在试验区内,沿东南—正北方向,地势缓缓上升,坡度变化不大,保证航测基高比在合理范围内。
2 试验方案
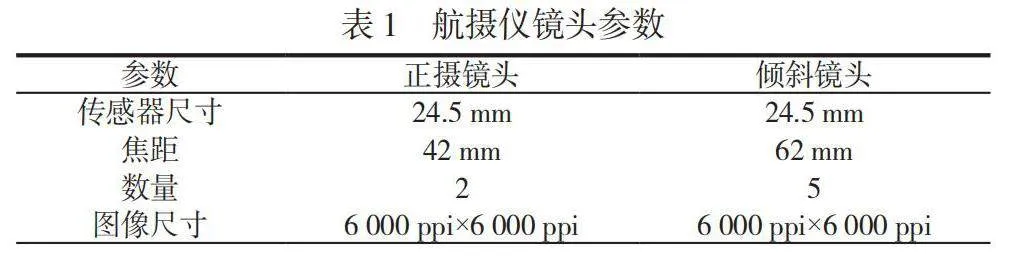
本文采用大疆六旋翼无人机DJIM600 Pro作为飞行平台,配置睿铂( Rainpoo) DG3五镜头航摄仪进行无人机航测。为了取得影像的地面平均分辨率,倾斜航摄仪侧视镜头的焦距比正视镜头的焦距长。航摄仪镜头参数见表1。
应根据测量目的确定无人机航测参数。地面采样距离(Ground Sample Distance,GSD)是地面相邻2个像素点之间的实际距离,由飞行高度与相机参数共同决定。研究表明,数据建模的精度约为GSD的2.5倍[2,5]。本文根据《低空数字航空摄影测量外业规范》,设置航向重叠度和旁向重叠度,重叠度越高,影像匹配度和建模精度越高[4]。综合考虑无人机平台、相机参数、GSD、重叠度、飞行高度、航线长度、航点数量、测区形状、地形地貌以及天气条件等因素,进行以下设定。
2.1 地面采样距离(GSD)
根据数据建模的精度要求,本文将GSD设定为2.5 cm。根据GSD和相机参数计算对应的飞行高度,如公式(1)所示。
(1)
式中:H为飞行高度;f为焦距;GSD为地面采样距离;p为像素尺寸。
2.2 重叠度
为了保证影像匹配度和建模精度符合要求,本文设定航向重叠度为75%,旁向重叠度为45%,即相邻影像在航向和旁向上分别有75%和45%的重叠区域。根据重叠度和相机参数,可以计算航线间距和航迹间距,如公式(2)、公式(3)所示。
SL==15.88 m (2)
SW==15.67 m (3)
式中:SL为航线间距;SW为航迹间距;RL为航向重叠度;RW为旁向重叠度;L为相机的长边像素数;W为相机的短边像素数。
2.3 航线长度、航点数量和测区形状
根据测区的实际情况,本文选择了1个长方形测区,长约400 m,宽约300 m,面积约0.3 km2。根据航线间距和航迹间距,计算需要设置的航线条数和航点个数,如公式(4)~公式(6)所示。
(4)
(5)
NP=NW·NW=26×26=676" " " (6)
式中:NL为航线条数;NW为航迹个数;NP为航点个数;LA为测区长度;WA为测区宽度。
综上所述,本文设置图像地面分辨率约2.5 cm,与此对应的飞行高度须在150 m以上。试验区共设置26条航线,累计获取影像676张,成图面积为0.3 km2。
3 控制点布设
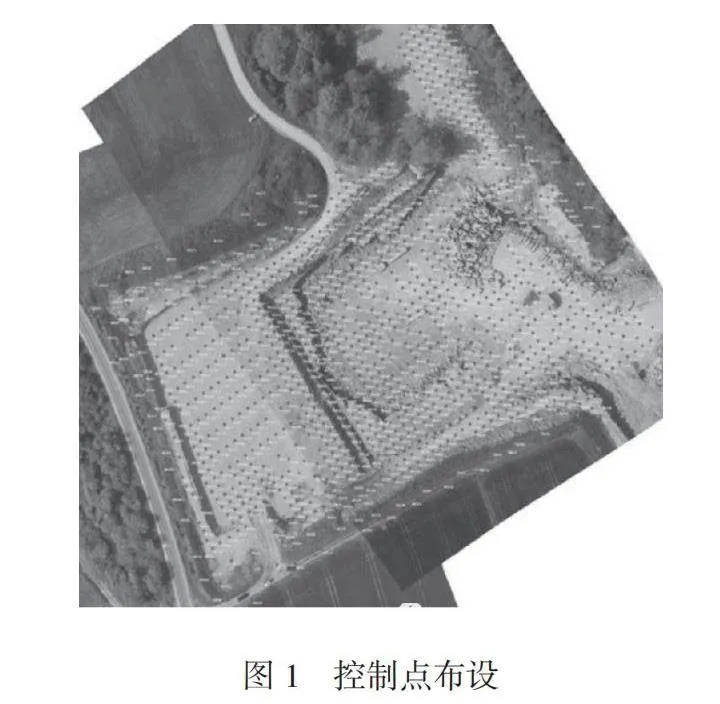
为了保证空中摄影数据与地面测量结果的一致性,本文在测区布设了一定数量的控制点,作为摄影空三精化处理的基础数据。根据1∶500比例尺的标准要求,本文控制测区高程。在每条主航道上选取23个平高点作为控制点,按照观测顺序计算,其余平高点作为检验点,用于评价航拍精度。采用GNSS 实时动态(Real-time kinematic,RTK)测量控制点,测量精度为高程1.4 cm、平面1 cm。控制点的布设如图1所示。
4 影像数据处理
本文利用飞马无人机管家软件和Context Capture软件处理倾斜摄影数据。在测量时段,现场气象条件优良,光照充足,风速低于4级。使用开源二进制场景格式(Open Scene Graph Binary,OSGB)建立模型,能够同时提取观测点坐标和三角数据,缩减建模时间[5]。首先,在软件中输入测量影像。其次,根据POS数据得到连接点位置,完成模型的相对定位,利用算法进行影像几何校正。最后,使用控制点数据对影像进行平差计算,得到地物真实尺寸与定位。
5 结果分析
5.1 测量精度
采用RMSE指标评价航测数据的精度,它包括平面和高程2个方面的误差。本文使用Context Capture三维实景建模软件处理空中三角测量数据,得到检查点的三维坐标(X,Y,H)。为了衡量误差大小,在计算前将每个检查点的坐标差异进行平方,以消除负值影响。首先,求出检查点i的X方向的误差平方为(Xi-XRTKi)2,其中Xi为检查点i的立体图坐标,XRTKi为检查点i的RTK坐标。需要将所有检查点的误差平方求和,以得到总的误差平方和。例如X方向的误差平方和为∑(Xi-XRTKi)2,i=1~n,n为检查点的数量。其次,将误差平方和除以检查点的数量,得到平均误差平方。例如X方向的平均误差平方为[∑(Xi-XRTKi)2]/n,n为检查点数量。最后,对平均误差平方开平方根,以得到均方根误差。例如X方向的均方根误差为,将其与GNSS-RTK测量坐标(XRTX,YRTX,HRTX)进行对比,得到检查点的RMSE。如公式(7)所示。
(7)
式中:RMSEX、RMSEY、RMSEH为各方向均方根误差;n为检查点数量;检查点i的立体图坐标为(Xi,Yi,Hi);检查点i的RTK坐标为(XRTKi,YRTKi,HRTKi),检查点的RMSE。
以上方法分别应用于X、Y和H 3个方向,得到相应的均方根误差。为了得到总的平面误差,使用勾股定理将X和Y方向的误差合成为一个斜边,如公式(8)所示。
(8)
式中:RMSEp为斜边的航测数据精度。
5.2 精度和效率
5.2.1 平面精度
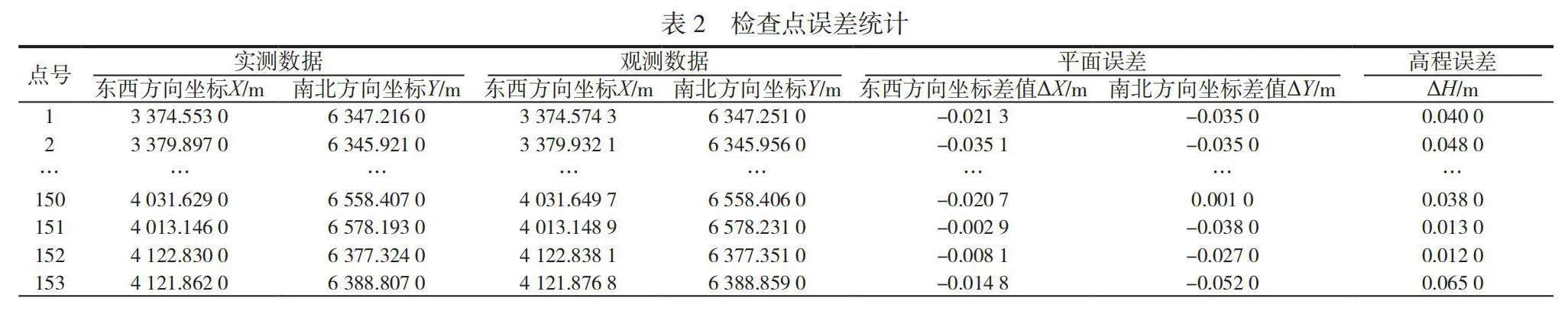
为了评估无人机摄影三维模型的位置精度,本文分析了153个检查点在模型中的坐标偏差和在平面中的误差,检查点平面误差如图2所示,检查点误差统计见表2。实地测量得到检查点,检验模型与真实地形的吻合程度。在平面中的误差反映了检查点在水平方向上的实测坐标与模型量测坐标的差异。根据图2可知,在平面中误差的最大值为4.76 cm,最小值为0.05 cm,平均值为2.36 cm,标准差为1.01 cm。《国家基本比例尺地形图更新规范》规定,地籍测绘的平面测量误差应≤5 cm,图2中的所有检查点都满足该要求,说明倾斜摄影三维模型的位置精度达到了规范水平,这个结果验证了无人机航测技术在测绘领域的可信性和有效性。
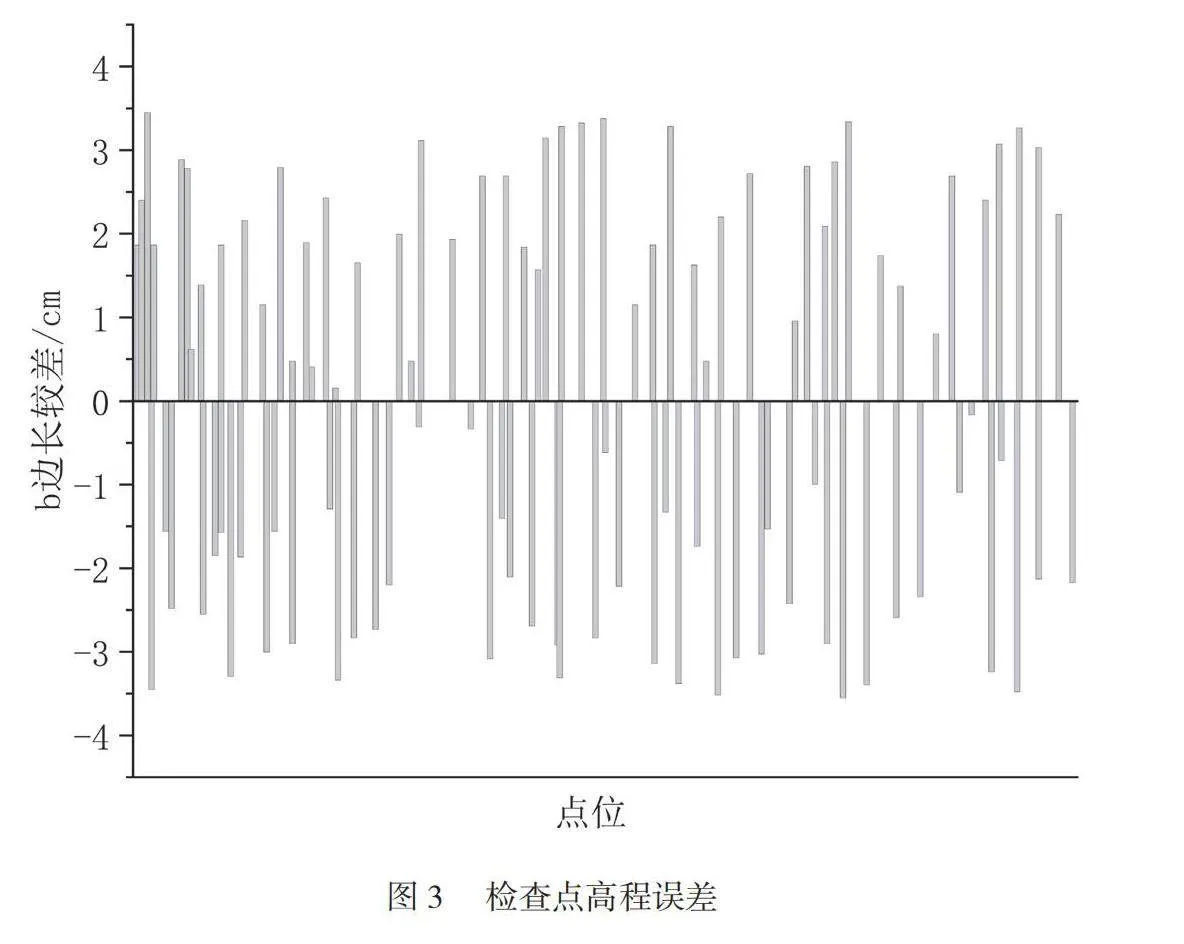
5.2.2 高程精度
误差是从三维模型中提取的观测点边缘长度与实地测量仪器测得的长度之间的差异。100多个检查点高度误差分布如图3所示。图3中的误差范围为-4 cm~4 cm,呈对称分布,说明无人机测量方法的系统误差较小。图3中的垂直线条为误差的频数。由图3可知,频数最高的误差为0 cm,38个观测点高程误差为0 cm,占总数的12.4%。频数最低的误差为-3.9 cm和3.9 cm,各有1个观测点高程误差为-3.9 cm和3.9 cm,占总数的0.3%。图3中水平线为误差的标准差,即误差的离散程度。观测区域的标准差为2.8 cm,说明误差分布比较紧密,没有出现较高的偏离值。根据《国家基本比例尺地形图更新规范》对地籍测绘精度的要求,平面测量误差应lt;5 cm。图3中的平面均方根误差都满足该要求,说明无人机航测技术在三维模型的位置精度达到了规范水平。
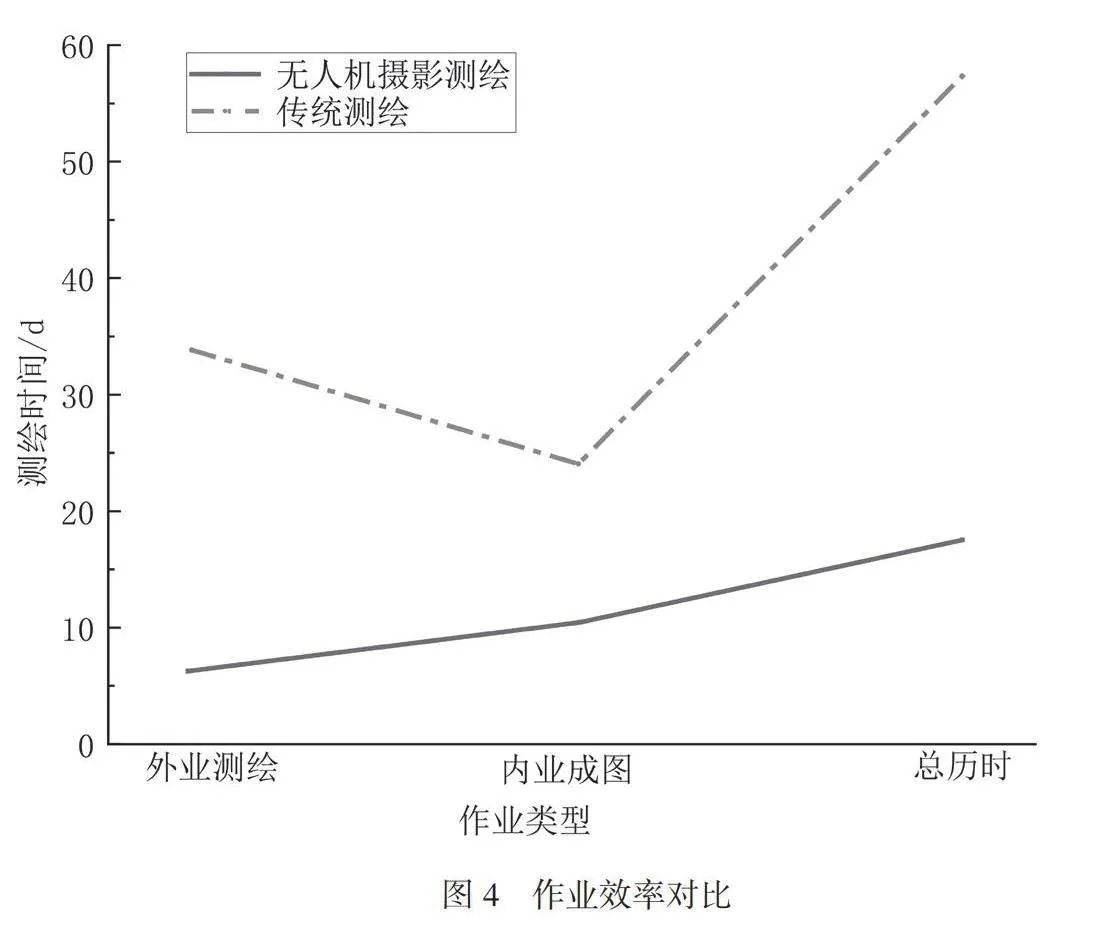
5.2.3 作业效率分析
无人机倾斜摄影技术和传统全站仪+GPS RTK方法在外业作业、内业作业和总用时方面的作业效率对比如图4所示。从图4可以看出无人机倾斜摄影技术和传统全站仪+GPS RTK方法的外业作业效率,传统全站仪外业测绘的作业周期为50 d,无人机外业测绘的作业周期为10 d,说明无人机倾斜摄影技术的外业作业效率是传统方法的5倍,节省了大量时间和人力成本。传统内业成图的周期为25 d,无人机倾斜摄影技术的内业作业效率是传统方法的2.5倍,传统测设方法需要耗费更多时间,投入更多人力。对比测量工作总用时可以发现,采用无人机倾斜摄影技术的工作总用时为20 d,传统测设方法总用时为75 d,说明无人机倾斜摄影技术的总用时效率是传统方法的3.75倍,作业效率整体提升。
无人机摄影测量是一种获取三维数据的有效方法,但是需要权衡高分辨率和对阴影运动异常值的敏感性。如果要生成高分辨率的数字高程模型,就必须对地形进行适当处理,并使用耗时的地面控制点定位观测点。
6 结论
本文结合实际案例,比较了无人机航测和传统测量在测量精度以及测量效率方面对地形测绘工作的影响,得到以下3个结论。1)无人机测绘获得的观测点误差范围呈对称分布,说明无人机测量方法的系统误差较小;观测区域的标准差为2.8 cm,说明误差分布比较紧密,没有出现较高的偏离值。2)在无人机摄影测量的过程中,观测点的平面与高程均方根误差都符合要求,说明无人机航测技术在三维模型的位置精度方面达到了规范水平。3)对比测量工作总用时,采用无人机倾斜摄影技术的工作总用时为20 d,传统测设方法总用时为75 d,说明无人机倾斜摄影技术的总用时效率是传统方法的3.75倍,整体提高了作业效率。
参考文献
[1]向华林,李秉兴.单镜头无人机倾斜摄影测量的三维建模及精度评估[J].测绘通报,2022(增刊2):237-240.
[2]晏军,杨银波,何元甲,等.无人机摄影测量三维建模与地形测量精度分析[J].测绘通报,2023(增刊1):54-58.
[3]杨帆,任闯,曲丹,等.机载LiDAR技术在矿区地表沉陷灾害监测中的应用[J].测绘工程,2023,32(4):59-68.
[4]盛海泉,覃婕,周吕,等.无人机倾斜摄影测量与GNSS土方量测算精度对比分析[J].测绘通报,2022(增刊2):310-315.
[5]宫晓春.无人机倾斜摄影测量在地形图测绘中的应用[J].华北自然资源,2023(1):250-252.
