无人机不停机巡检路线规划方法
2024-12-06牛霈张金伟文家伟叶芳王超










摘 要:传统的无人机风机巡检路线规划方法只能采用固定飞行速度,导致无法准确巡检所有监测点,因此本文设计一种不停机巡检的无人机风机巡检路线规划方法。设置相应的约束条件,包括无人机的最大航程、最小步长和最大路径偏移角。在满足这些约束条件的情况下,提高无人机的飞行速度,构建无人机风机巡检模型,模拟无人机在风机间的巡检过程。采用极坐标编码来表示无人机风机巡检路线,对风机巡检路线进行优化。试验结果表明,本文设计的不停机巡检的无人机风机巡检路线规划方法在5次试验中均巡检13个监测点,准确性和应用价值更高。
关键词:不停机;巡检;无人机;风机;巡检路线
中图分类号:TM 63" " " " 文献标志码:A
随着能源行业快速发展,风力发电机组已成为全球范围内广泛使用的清洁能源设备。由于风力发电机组结构复杂,运行环境恶劣,因此对其进行高效地巡检和维护十分重要[1-2]。无人机风机巡检是一种新型巡检方式,其具有高效、灵活和安全等优点[3],为风力发电机组的巡检和维护提供了新的解决方案。不停机巡检是无人机风机巡检的核心要求,其能够在短时间内完成大量风机的巡检任务,同时避免影响风机正常运转[4]。为了实现该目标,需要开发一种高效的无人机巡检路线规划方法。本文详细介绍了不停机巡检无人机风机巡检路线规划方法的研究现状和发展趋势。通过分析和比较现有无人机巡检方法,提出一种无人机巡检路线规划方法,旨在提高无人机巡检的效率和精度。与现有的无人机巡检路线规划方法进行对比,证明该方法在提高无人机巡检效率和精度方面具备优势。本文探讨了该方法在实际应用中可能遇到的问题和解决方案。该方法理论意义重大,实践价值很高,为能源行业的可持续发展提供新的技术支持和推动力。
1 不停机巡检的无人机风机巡检路线规划方法设计
1.1 无人机风机巡检路径规划约束分析
在巡检过程中,无人机有巡检任务、UAV性能等诸多制约,无法寻找安全、可行和有效的巡检渠道[5]。在无人机巡检路线的建设过程中,应当关注的约束条件包括最大航程、最小步长和最大路径偏角,下面对其进行分析。
当巡检时,假设无人机的最高飞行高度为Vmax,在一条航路中有n个观测站,其第i个观测站的最高飞行路线高度为vi,该飞行路线的平均航程V如公式(1)所示。
(1)
式中:i为观测站数目,其范围为(1,n)。
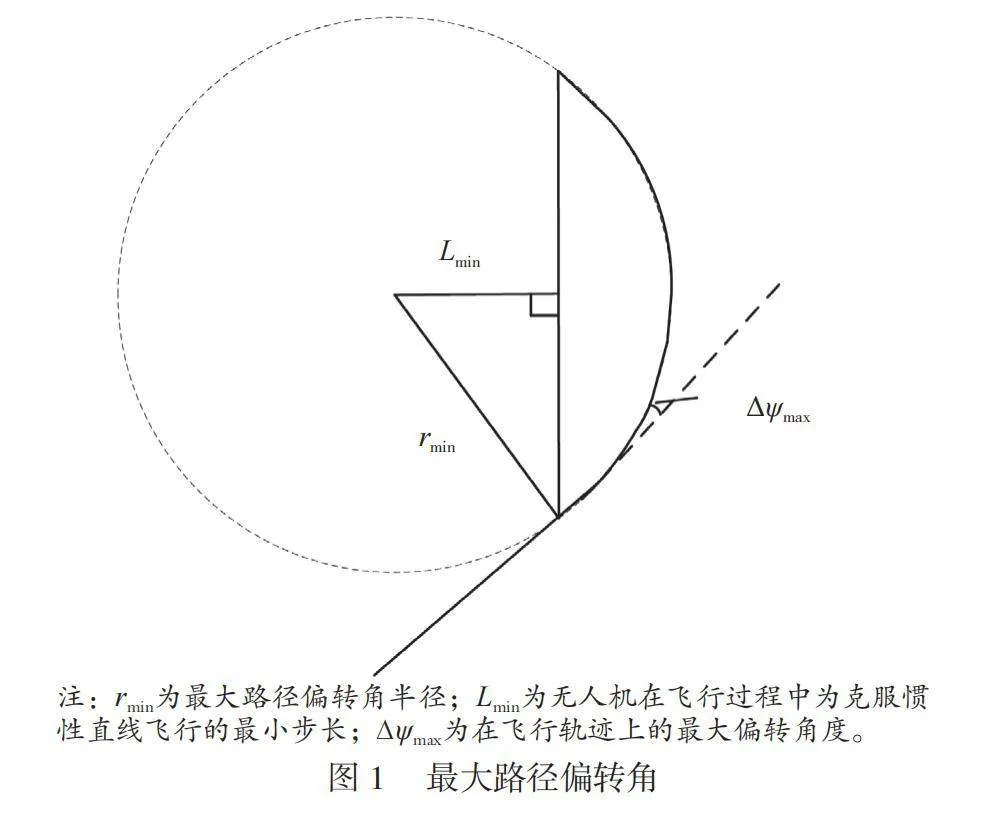
最大路径偏转角如图1所示。在飞行过程中,为了克服惯性,无人机必须计算直线飞行的最小步长Lmin。
从图1可知,受机动性约束,无人机风机的路径偏转角度需要满足-∆ψmax≤-∆ψi≤∆ψmax的条件,则∆ψmax如公式(2)、公式(3)所示。
(2)
(3)
式中:rmin为无人机行驶的最小转弯半径;nmax为无人机行驶的最大法向过载;v为无人机的当前飞行速度;g为重力加速度。
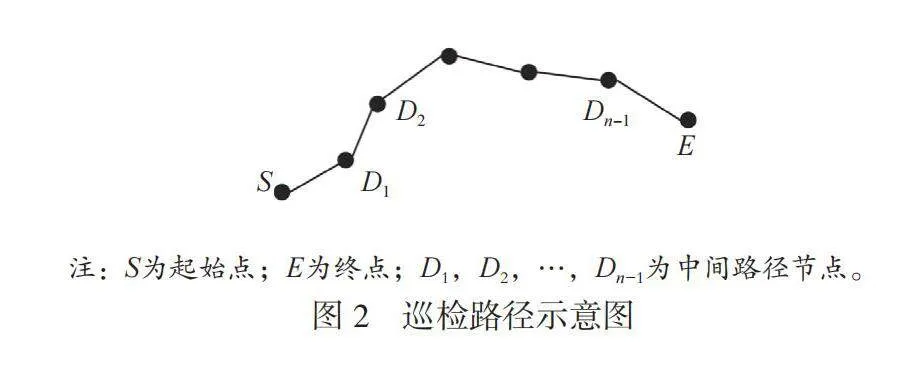
航迹规划是指在给定的空间内,利用直线连接2个相邻的路径结点,得到1条满足约束的航线。每条巡检路径可以由1组S,D1,D2,…, Dn-1序列点来表示(如图2所示)。
在该基础上,设1条包括n+1个目标点的巡检路线,pi为该路径第 i 个线段的长度,以该起止点作为无人飞行器巡检作业的起止点。约束条件的目标函数如公式(4)所示。
(4)
式中:min f为最小目标函数;h为惩罚函数。
综上所述,设置无人机风机巡检路径规划约束条件,使无人机能够安全地完成巡检任务。
1.2 优化无人机风机飞行速度
为避免风对轨迹规划的影响本文设置2种特定飞行速度,即最大耐力速度vme和最大航程速度vmr。
1.2.1 最大耐力速度
无人机风机的飞行能耗主要包括推进能量和引力势能2个部分。在低速飞行的情况下,无人机须耗时很久才能抵达目标地点。当风速较大时,在风力作用下,推进器的能量消耗会以几何倍数增长。为提升无人机飞行的效率,给定风速为vw,最大耐力速度如公式(5)所示。
(5)
飞行能耗EP、无人机相对地面速度vu的导数如公式(6)所示。
(6)
式中:m为无人机风机巡检效率;s为无人机风机巡检时间。令,可以得到vme。
1.2.2 最大航程速度(vmr)
最大航程速度为使无人机飞行距离最大化的航程速度。给定的无人机电池容量为EU,无人机飞行距离为Ep,每1 m的能耗如公式(7)所示。
(7)
式中:vu为飞行速度。
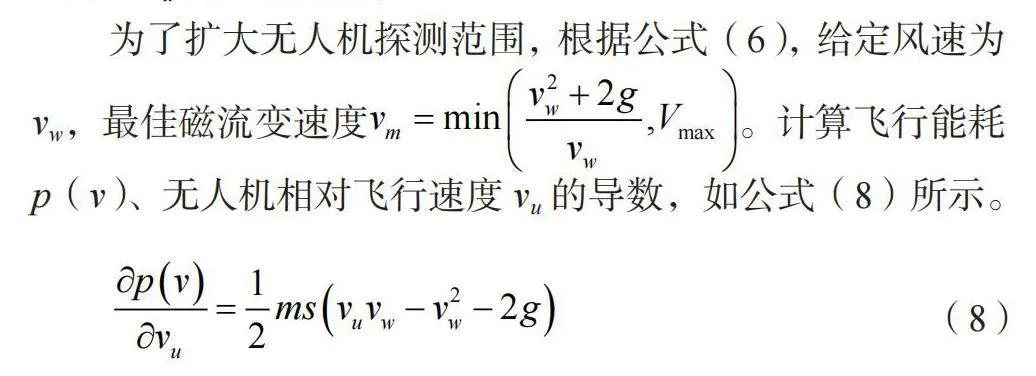
为了扩大无人机探测范围,根据公式(6),给定风速为vw,最佳磁流变速度。计算飞行能耗p(v)、无人机相对飞行速度vu的导数,如公式(8)所示。
(8)
1.3 构建无人机风机巡检模型
在上述研究的基础上构建无人机风机巡检模型。首先,根据无人机的飞行速度、飞行高度和续航能力等参数,对无人机的性能进行建模。这些参数将直接影响无人机的巡检能力,例如拍摄质量和覆盖范围等。其次,根据风机的位置、形状和高度等参数,对风机布局进行建模。最后,在无人机风机巡检过程中,拍摄质量十分重要,因此,须根据拍摄角度、分辨率和光照等参数,对拍摄质量进行建模。将相关参数进行加权归一化处理,以构建一个完善的无人机风机巡检模型,如公式(9)所示。
G=[Za,xa,ya,I,di,k] " " " (9)
式中:G为无人机风机巡检模型表达式;xa、ya分别为在水平坐标系中的横向和纵向位置;Za为无人机路径规划模型;I为拍摄质量评估模型;di为避障模型;k为通信模型。
综上所述,基于无人机的性能、风机的布局、拍摄质量要求以及环境条件等构建无人机风机巡检模型。该模型可以模拟无人机在风机间的巡检过程,并为路径规划和避障策略提供有力支持。
1.4 确定无人机风机巡检路线极坐标编码
采用在无人机巡检过程中对路径点进行编码的方法,对巡检路径极坐标进行编码,巡检路径极坐标如图3所示。以检测轨迹的起点为原点,以端点与起点的连线为极轴,起点和终点的坐标为(0,0)、(ρT,θT),在该基础上,将巡检轨迹根据Lmin划分为 N个区段。在选择过程中,初始圆的半径ρ0gt;Lmin,ρT为起始点至终点的距离,则N=。
路径初始偏移角为∆φ1,第一轨迹分段(0→1),∆φ1为路径段(i-1→i)偏离路径段(i-2→i-1)的偏转角,∆φi∈[-∆φmax,∆φmax]。
根据巡检道偏转角调节比例∆φc的倍数来对巡检路径极坐标进行编码,ρ0以极角半径为单位,路径点(1,2,3,…,n-1)的极径依次为(L1,L2,L3,…,Ln-1)。如果无人机巡检路径的第i个路径段基因的值为K,那么路径段(i-1,i)偏离路径段(i-2,i-1)的偏角为∆φi=gi∆φ0。无人机飞行路径基因位gi的范围如公式(10)所示。
(10)
式中:Δφmax为最长偏离路径;Δφ0为坐标0处的偏转角度。
每个路径点在坐标系下极坐标编码(xi,yi)如公式(11)、公式(12)所示。
xi=i×Lcosθi (11)
yi=i×Lsinθi (12)
式中:xi为每个路径点在横坐标上的极坐标编码;yi为每个路径点在纵坐标上的极坐标编码;L为偏离路径长度;θi为巡视道偏转角。
综上所述,确定无人机巡视过程路径点极坐标编码,规划巡检路径。
2 试验
2.1 试验准备
本次测试采用飞行性能和负载能力出色的无人机设备,以评估其性能。测试选用相机、GPS和IMU等多种传感器设备,用于拍摄风机叶片影像以及记录位置信息等关键数据。计算机设备用于数据处理和控制无人机。风机位置数据可提供试验风场中各风机的精确位置信息。环境数据(包括气候和地理信息等)用于评估环境对巡检路线的影响。综合运用以上设备和数据,全面评估无人机在风机巡检中的应用潜力。无人机飞行参数见表1。
在试验过程中有以下6个注意事项。1) 试验环境。保障试验环境安全、可靠。选择一个相对开阔、无障碍物的场地进行试验,以避免无人机在巡检过程中遇到障碍物并发生意外。2)试验设备。在试验前,须对试验设备(例如无人机、摄像头和电池等)进行充分测试和校准,以验证设备的可靠性和稳定性,保证试验结果准确。3)路线规划。根据实际情况,选择合适的路线进行试验。在规划路线的过程中,应考虑无人机的性能、风机的布局和拍摄质量要求等因素,以保证无人机能够顺利完成巡检任务。4)操作人员。关注无人机的飞行状态和周围环境,当遇到异常情况时,无人机能够及时采取措施。5)数据收集与分析。在试验过程中,应收集并记录相关数据,例如飞行时间、拍摄质量合格率、拍摄点数量、路径长度以及能耗等。深入分析数据,评估不停机巡检方法的实际效果,为后续优化提供参考。6)安全性。在试验过程中,应始终将安全性放在首位。应提前评估风险,预防可能存在的安全隐患。例如,当遇到恶劣天气或复杂环境时,应及时停止试验以保障安全。
2.2 试验说明
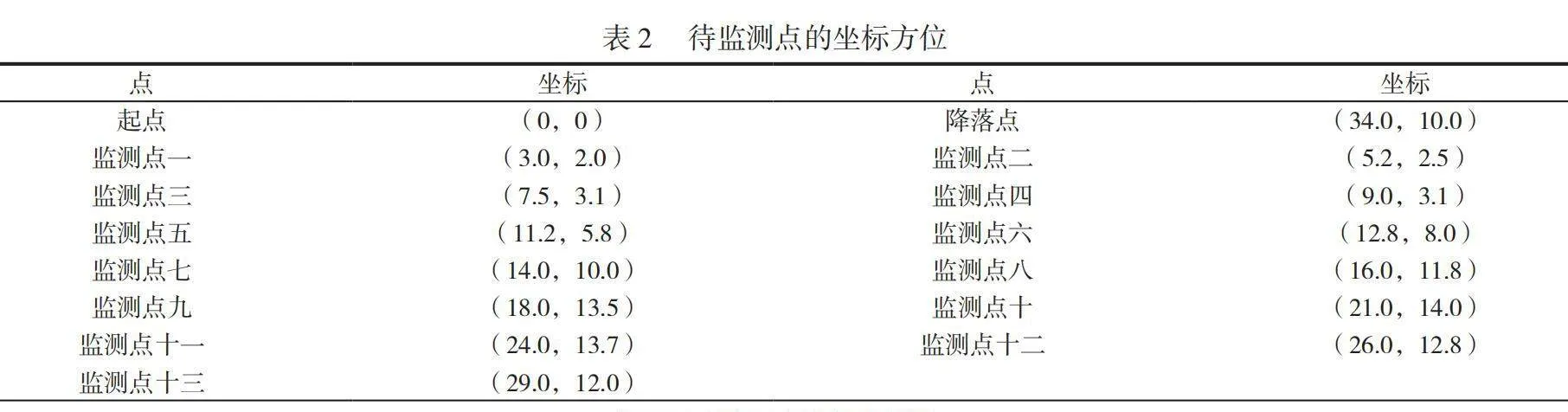
假设在无人机风机巡检线路中一共有13个要测站点,起飞点坐标为(0,0),降落点坐标为(34.0,10.0)。具体待监测点的坐标方位信息见表2。
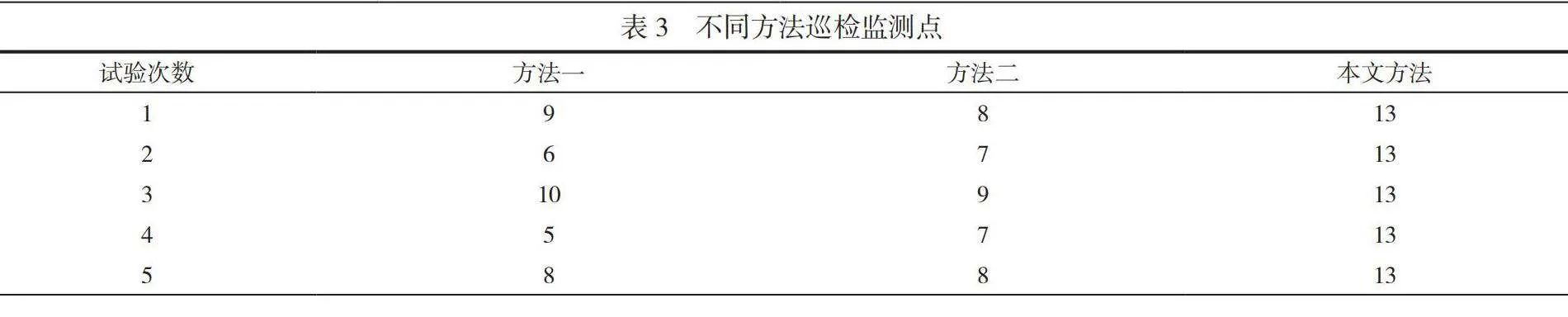
为测试本文设计的无人机不停机巡检路线规划方法的精度,将其与文献[1](方法一)、文献[2](方法二)进行对比,分别判断3种方法的性能,每隔15 min试验1次,共试验5次,记录无人机巡检了多少个监测点,得到对比结果,见表3。
从表3可以看出,方法一和方法二不能巡检至所有监测点,并且方法一巡检不稳定,而本文方法5次试验均巡检至13个监测点。由此可证明,本文方法准确率和应用价值更高。
3 结语
在不停机巡检中,无人机风机巡检是一项关键任务,旨在保证风力发电设备正常运行。本文提出一种规划方法,构建风机模型,定义巡检路径和避障规则,使无人机在风机间进行智能巡检。未来将继续优化该方法,以适应更复杂的风场环境,满足更多样的巡检需求。
参考文献
[1]叶仁俊.大型起重机金属结构无人机自动巡检技术研究[J].中国设备工程,2023,24(19):28-30.
[2]常安,陈振辉,付明,等.无人机电力巡检航线智能规划及自主巡检研究[J].电网与清洁能源,2023,39(7): 61-66.
[3]毛鹏飞,张杰,刘洋,等.基于差分定位的输电线路无人机智能巡检系统[J].微型电脑应用,2023,39(5): 51-54,63.
[4]陈诚,戴永东,沈筠,等.基于无人机遥感技术的配电网巡检系统设计[J].微型电脑应用,2023,39(5):107-110.
[5]王家彬,侯宝年,胡哲,等.基于无人机多光谱光学特性的海面油污辨识方法[J].武汉工程大学学报,2023,45(2): 208-213.
