地铁轨行区障碍物检测系统方案研究
2024-12-05李楠岳新宇李纪泽

摘要:随着国内城市轨道交通运营里程和客流量的不断增加,列车安全运行的重要性愈发突出。地铁轨行区障碍物检测系统基于视频智能分析技术,对轨旁摄像机采集的影像进行智能分析,及时发现轨行区障碍物,并向行车指挥人员发出报警信息,缩短紧急事件处理时间,减轻运营人员的工作压力和强度,进而有效提升地铁的安全运营水平,具有较大的社会经济价值。
关键词:城市轨道交通障碍物视频智能分析自动巡检
ResearchontheObstacleDetectionSystemSchemeinSubwayTrackArea
LINan1YUEXinyu2LIJize3
- BeijingQuanluCommunicationandSignalResearchandDesignInstituteGroupCo.,Ltd.Beijing,100071China;2.BeijingSubwayTechnologyDevelopmentCo.,Ltd.,Beijing,100071China;3.ShenzhenRailwaySignalTechnology(Shenzhen)Co.,Ltd.,Shenzhen,GuangdongProvince,518000China
Abstract:Withthecontinuousincreasingofoperationmileageandpassengerflowofdomesticurbanrailtransit,theimportanceoftrainsafetyoperationguaranteeisbecomingmoreandmoreprominent.Theobstacledetectionsysteminthesubwaytrackareaisbasedonvideointelligentanalysistechnology,intelligentlyanalyzingtheimagescollectedbythetracksidecameras,timelydetectsobstaclesinthetrackareaandsendsthealarminformationtothecommandpersonnel,shorteningtheemergencyprocessingtime,reducingthepressureandintensityofoperatingpersonnel,andeffectivelyimprovingthesafetyofthesubwayoperationlevelIthasgreatsocialandeconomicvalue.
KeyWords:Urbantracktransit;Obstacles;Intelligentvideoanalysis;Automaticinspection
伴随着我国经济的蓬勃发展和城市化进程的不断加快,城市轨道交通以运量大、速度快等优势在我国公共交通事业中发挥着越来越大的作用,但同时,各类安全事故在城市轨道交通运营过程中也时有发生,这给地铁安全运营带来了不小的压力。城市轨道交通运营安全的主要影响因素包括气象因素、轨道因素、车辆因素、供电因素、信号系统因素、人为因素等。在轨道因素中,位于轨道上立体行车空间内的障碍物极易给列车带来破坏性撞击,甚至引发脱轨等严重事故,造成重大灾害和不可估量的损失。同时,城市轨道交通全自动驾驶模式的普及对行车安全也提出了更高的要求。基于上述原因,轨行区障碍物检测的相关研究从未停止,并在近些年逐渐成为行业热点。
1传统轨行区障碍物检测方案简介
1.1轨道交通轨行区安全需求分析
异物侵入列车行车限界(简为“侵限”)事件会对运营安全造成极大的影响。对地面轨道而言,封闭措施难免存在漏洞,高空抛物、山体缓坡、落石等情况都会造成行车安全事故。而在隧道内,线路老化、维护不到位或人员工作疏忽等也会发生隧道内构筑物松动脱落、设备位置变化,导致异物侵入行车限界,导致重大安全事故发生[1]。
目前,对于铁路、地铁等列车侵限物的发现与处理主要靠人工巡视,需要大量人员参与,人工巡视周期较长,且巡检时间一般在晚上的车辆运行窗口期,难以在第一时间发现问题。因异物侵入事件的突发性和高危害性,迫切需要一种具有高度智能化、全天候、响应快、准确度高的障碍物侵入自动巡检系统[2]。
1.2目前主流技术方案
根据检测设备的安装位置划分,现有检测方案大体可分为轨旁障碍物检测(以下简称轨旁)和车载障碍物检测(以下简称车载)两种[3]。
1.2.1红外栅栏(轨旁)
该方案在轨行区两侧安装红外线收发器,当障碍物侵入轨行区时,红外线被遮挡,从而触发报警。该方案灵敏度较高,但也存在易受天气干扰、设备部署量大、维护工作量大等缺点。
1.2.2振动检测(轨旁)
该方案在轨道上安装振动传感器,并通过算法来区分振动原因是列车经过还是障碍物碰撞。该方案单个检测点可覆盖400m长度钢轨,具有设备部署量少的优点。但其仅能检测到对钢轨有冲击的障碍物,而对于小动物、风筝、塑料袋等冲击能量较小的物体无法检测,且该方案目前处于前期研究阶段。
1.2.3车载视觉检测(车载)
该方案通过在列车前端安装摄像机进行实时拍摄,并通过算法分析列车前方是否有障碍物。该方案具有设备部署量少的优点,但其视觉原理决定了探测距离较短,对于高速运行的列车无法提供足够的紧急制动时间[4]。
1.2.4车载激光雷达(车载)
该方案通过在列车前端安装激光雷达来探测前方障碍物,其优、缺点同车载视觉检测方案。
2一种新式轨行区障碍物检测系统
2.1系统概述
轨行区障碍物检测系统利用了视频智能分析技术。不同于车载视觉检测方案,该方案将摄像头设置于轨旁。通过采集轨行区影像,系统自动对运行线路进行安全巡视,及时发现轨行区影响行车安全的因素(简称“障碍物”),并向行车指挥人员发出报警信息,以便其对运行中的列车采取安全措施。
轨行区障碍物检测系统(如图1所示)由算法服务器、应用服务器、行调终端及其网络设备等构成,并且与车站视频监控系统共享前端设备,如轨旁摄像机、车站视频服务器、图像存储设备及其网络设备等。
算法服务器通过与轨旁摄像机的接口,按照一定的规则,周期性地从指定的轨旁摄像机视频流中截取轨行区影像。在获取轨行区影像后,其首先判断列车位置是否位于摄像机监控区域,当列车位于此摄像机监控区域时,系统将忽略此影像,以避免误报[5]。
当系统获取无列车占用的轨行区影像时,将与事先存储于系统内的标准断面图像(无障碍物)进行比对。如图像一致,则判别为无障碍物;否则,将向控制中心行车调度员(简称“行调”)报警,推送报警画面,提供障碍物位置及最近列车位置,供行车调度员及时开展后续操作,避免危及行车安全的事故发生。
该系统可实现的基本功能如下:异物侵限识别定位与告警上报,列车位置跟踪定位,现场图像调看,告警误报忽略,障碍物告警记录的存储、查询、统计和分析,设备状态管理。
2.2系统设计原则
2.2.1具备全天候清晰成像能力
该系统摄像机基于扩展短波红外波段进行成像,对实现大气红外透射窗口的“无缝隙探测”效果良好,并适用于多雾、低照度等光照环境恶劣情况的全天候场景,不受雨天、大雾、微光或无光等外部光线条件恶劣的影响,并对运营列车的车灯具有很好的强光抑制作用。
2.2.2具有较强的环境适应性和一定的自检性能
因轨行区环境较为恶劣,因此该系统在设计时充分考虑日晒雨淋、列车振动、设备偏移,以及因列车经过或者其他原因导致的可能对检测采集设备产生的振动、偏移等影响,利用全天候成像稳像识别系统判断该设备是否处于正常运行状态。
2.2.3智能分析处理能力
该系统通过多点轮询智能图像分析算法,对采集到的图像进行大数据分析处理,应可实时准确识别目标轨行区的安全状态。
2.2.4具备较强的易部署性
该系统被部署在隧道内部侧壁上或者露天安全限界外,应具备较高的可部署性,实现全域监控;同时应具有设备独立性,不对部署区域内的其他设施产生影响。
2.3系统运行模式
系统运行模式包括线路巡检模式、车站巡检模式、区间跟踪巡检模式3种。
2.3.1全线巡检模式
把全线所有轨旁摄像机按列车运行方向分为两个巡检单元进行巡检,适合于每天运营开始前使用。
2.3.2车站巡检模式
以车站为单位,将该车站管辖范围的所有轨旁摄像机按运行方向分为两个巡检单元,每个巡检单元按照设定的巡检周期依次进行轮巡抓拍和比对的运行模式。在此模式下,每个车站可同时进行自动周期巡检,能缩短巡检周期,提高巡检效率,有利于迅速发现障碍物,适用于高峰运营场景。
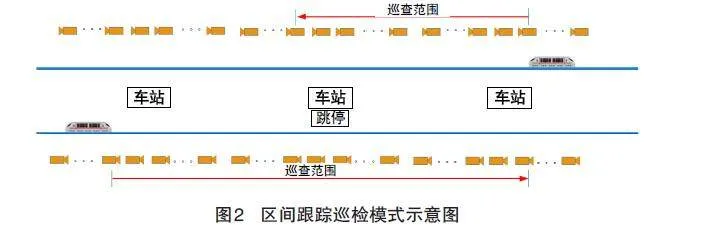
2.3.3区间跟踪巡检模式
系统实时跟踪列车行进位置,并触发列车前方所到车站的所有轨旁摄像机进行自动巡检。检测到异物入侵时的处理同全线巡检模式。区间跟踪巡检模式如图2所示:
此模式适用于车站设置密度较高、站间距短的各种运营场景,目的是减少设备运行次数,以延长设备及系统寿命和提高可用性。
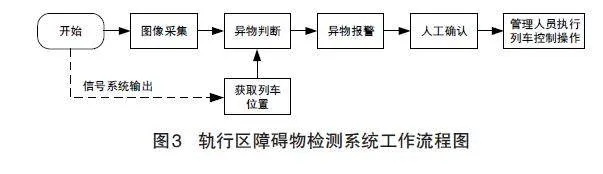
2.4系统工作流程
轨行区障碍物检测系统工作流程如图3所示。
3结语
根据交通运输部网站数据,截至2023年底,全国(不含港澳台)已有55个城市开通运营城市轨道交通线路300条,运营里程达9915km,完成客运量294亿人次。面对如此庞大的客流量和安全运营压力,可充分利用视频采集、智能分析等人工智能相关技术,提升地铁安全运营水平。地铁轨行区障碍物检测系统以准确可靠、独立运行为基本设计原则,并辅以完善的联动预案体系,通过减少手工操作,提高操作的速度和准确率,缩短紧急事件的处理时间,减轻运营人员的工作压力和强度,进而有效提升地铁的安全运营水平。
参考文献
[1]师帅.轨道交通系统主动障碍物检测研究综述[J].机电工程技术,2021,50(6):212-216.
[2]赵佳朋.面向嵌入式应用的列车轨道区域识别与障碍物检测技术研究[D].北京:北京交通大学,2024.
[3]陈仕涛.基于多传感器信息融合的轨道异物检测研究与实现[D].南京:南京邮电大学,2024.
[4]王维,梁汝军,黄涛.地铁列车障碍物视频识别系统设计[J].城市轨道交通研究,2019,22(6):166-169.
[5]肖添文,徐永能,余辉敏.城市轨道交通障碍物检测及列车控制技术[J].兵器装备工程学报,2020,41(10):161-165.