虚拟机器人协同学习:智能指导交互系统设计及实践进路
2024-12-05公雪马正婧谢中取刘秉新





[摘 要] 虚拟机器人作为通用人工智能新型载体,以其显著的多模态交互优势而受到重视,以支持学习者自主学习的方式赋能教育数字化转型。为提升其在针对不同课程的智能协同学习精准性,文章提出了基于MTV模型的虚拟机器人智能指导交互系统,通过定量研究方法,旨在分析虚拟机器人交互的耦合关系。文章以K12阶段不同类型课程的学习者学习数据为个案,结合虚拟机器人交互系统设计中用户逻辑、介质逻辑以及过程逻辑三层交互逻辑,对学习者与课程交互、学习者与系统交互以及学习者与虚拟机器人交互这三类交互形式进行分析,创建学习者情感偏好标签。通过结合ChatterBot机器学习算法挖掘出K12阶段五类学习者在学习取向、学习风格及学习需求三个维度的状态特征,提升中国式教育环境中集成虚拟机器人的教育交互精准度。文章发现,虚拟机器人智能指导交互系统在个性化学习路径指导、多维度课程资源推荐方面优势明显,为虚拟机器人发挥“智慧学伴”同伴效应及智能学习跟踪等提供实践层面参考。
[关键词] 人工智能; 机器人; 交互设计; 教育数字化; 人机协同; 个性化学习
[中图分类号] G434 [文献标志码] A
[作者简介] 公雪(1993—),女,山东临沂人。副教授,博士,主要从事教育智能化与教育机器人研究。E-mail:gongxuegx@foxmail.com。谢中取为通信作者,E-mail: xiezq@njust.edu.cn。
一、问题的提出
随着人工智能技术快速迭代,数智时代的中国式教育方式向数字化演进,相关智慧产品的智能化属性愈发突出,虚拟机器人作为教育机器人的虚拟化身,以融合多元人工智能新技术赋能个性化教学[1]、精准交互式学习[2]。2023年,教育部发布《以数字化开辟教育发展新赛道》,提到应带动物理与虚拟教学空间迭代融合,以“数字桥梁”赋能教育,促进课程教学改革[3]。同年,工业和信息化部等十七部门印发《“机器人+”应用行动实施方案》,提出将“机器人+”融合到教育场域,建设机器人服务平台[4],实现智慧教育新模式。通用人工智能技术促进了虚拟机器人作为具有智能决策、大数据集成、机器视觉等多重功能的智慧媒介被广泛应用于教育场域。现阶段,虚拟机器人虽具备强大语言支持与多模态技术,但实时数据生成技术较为薄弱[5],存在实时数据捕捉不准确、无法理解用户特定需求与学习进度变化等问题,亟待耦合大量数据源为其提供数据样本,供虚拟机器人进行学习,以此优化虚拟机器人的可交互式智能协同学习能力。
因此,文章将针对K12阶段学习者在偏文科课程(包括语文、英语、历史、地理课程)、偏理科课程(包括数学、化学、物理课程)以及偏艺术课程(包括美术、音乐课程)三类不同类型课程中构建基于MTV模型的虚拟机器人智能指导交互系统。基于三层交互逻辑对虚拟机器人的情感交互设计进行建模,从而捕捉学习者学习注意力变化[6],进行情感化互动,充分发挥智能学伴的协同作用。通过精准刻画学习者画像,推进虚拟机器人教育交互介入,从而营造沉浸式的精准课程推荐体验,适时进行个性化学习干预,扩宽虚拟机器人在数智时代的教育实践应用范围。
二、虚拟机器人智能指导交互系统协同学习的交互逻辑
虚拟机器人为学生提供精准学习支持与实时交互逻辑。其从用户逻辑(包括学科偏好、学习状态及学习反馈)、介质逻辑(包括课程反馈、界面设计及模型构建)以及过程逻辑(包括人机交互、应用场景及机器人行为)三层交互逻辑出发,构建了学习者与虚拟机器人交互、学习者与系统交互以及学习者与课程交互三类交互形式,为精准协同学习者进行有效学习提供了抓手,实现精准化学习干预与教学辅导。
(一)用户逻辑:学习者与课程交互
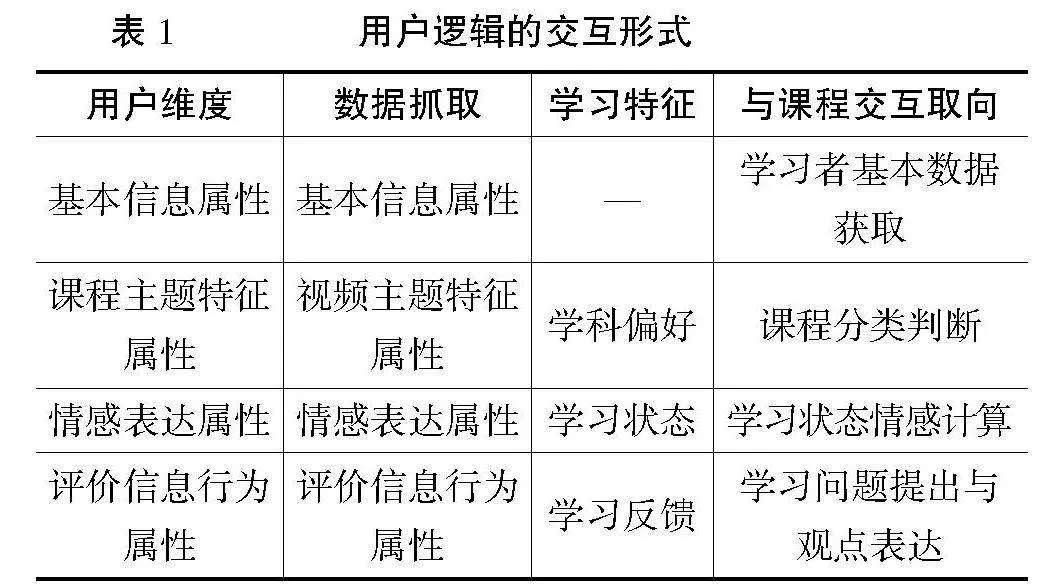
用户逻辑包括学科偏好、学习状态及学习反馈三个部分(见表1)。学习者作为面对虚拟机器人的直接交互者,其对不同课程的直接情感反馈是促进虚拟机器人这一类智能产品设计过程中关注用户真实学习需求的重要因素。通过对不同课程学习者情感偏好数据的获取,构建学习包供虚拟机器人进行学习,促进虚拟机器人有效嵌入学习者实时学习环境之中。
表1 用户逻辑的交互形式
1. 课程主题特征标签处理
根据在线教育平台浏览量、点击率、弹幕对K12阶段的课程进行人工标注与筛选,采用Python标准库对此类课程数据进行爬虫,去除对课程主题特征相关主题词产生影响的噪音信息,以确保数据质量,并收集清洗后的数据。由此,将数据分为偏文科相关课程、偏理科相关课程以及偏艺术相关课程三类,并分别进行课程视频主题特征提取分析。
2. 情感表达属性标签处理
(1)不同情绪学习者识别。学习者在学习中所产生的实时情感变化会直接影响学习状态与进度。通过建立自定义教育情感词汇本体库,并结合SO-PMI算法定义情感种子词,选取基准词并定义Pword和Nword,将单个词语δ1与Pword的点间互信息与δ1 与Nword之间的点间互信息进行相减运算,得到差值后进行情感判断,以弹幕关键词为筛选标准,筛选在线学习者的有效评论。
(2)情感分类与识别。文章构建的自定义教育情感词汇本体库融合了中文情感汇本本体库中的情感词和人工标注教育相关自定情感词。该本体库将情感按照情感类别、情感强度、词性种类及极性进行划分,分为乐、怒、好、哀、惧、恶、惊7大类和21子类[7]。将二者结合以扩展情感词的精细颗粒度。随后,将爬虫所筛选的文本词语结合后进行情绪分布计算,包括s(φ)词汇情感值、v(φ)词汇情感强度以及p(φ)词汇情感极性,从而得出7类情绪出现频率最高的情感特征词并构建情感标签。
(3)情感强度量化。情感词划分为五档(1、3、5、7、9档,强度逐次递增),将其极性划分为贬义向度、褒义向度(表示为2、1)。结合SnowNLP类库对中文进行分词与情感分析。在运算中,根据情感得分均值对情绪变化打分,区间在75%~100%为高正向积极情绪、50%~75%为低正向积极情绪、25%~50%为低负向消极情绪、0%~25%为高负向消极情绪。
3. 评价信息行为属性标签处理及学习包构建
(1)评价物理时间标签。经人工对三类课程标注并分类后,再对在线学习者在不同时间节点发送评论的△Tp和△Tυ平均相对注意力集中时间进行计算。若△Tp<△Tυ,说明学习者快进了部分学习内容[8];若△Tp=△Tυ,说明达到了理想学习情况,正常观看了课程;若△Tp>△Tυ,说明学习者暂停或中止过课程,进行了弹幕发送、回看知识点或休息操作。这些差异反映出学习者在观看在线课程时的直观互动模式,并将平均相对注意力划分为强、中、弱三类。
(2)用户生成内容标签。将在线平台课程数据与用户UGC总量结合计算。Gβ、Hβ为β内单个学习者参与学习时的弹幕,计算出其在学习过程中发送弹幕的数量与交互程度[9],并通过LDA主题建模技术来搜集主题内容并提取其学习需求特征。
(3)学习者活跃度标签。通过测定现存关系,以用户操作标准为入度,以此量化活跃度。以弹幕互动类型(包括与群体互动、与内容互动、与教师互动以及与功能互动)作为参数,对信息交互的中心性度量计算,并将其划为高度活跃、中度活跃、低度活跃及不活跃四个维度的活跃度标签,以此发现学习取向特征。
(二)介质逻辑:学习者与系统交互
介质逻辑是对课程反馈、系统界面及模型构建三个部分的设计。该部分主要通过自主对精准学习资源推送与专业化学习数据监测的方式满足个性化教育需求[10]。如图1所示,介质逻辑主要通过系统界面设计作为第一视觉媒介与学习者产生直接交互,学习包作为课程反馈的导向性模块与学习者产生间接弱交互,二者交互则是由基于Python Web框架Django的MTV模型进行实现。
图1 介质逻辑的系统交互形式
基于Django的MTV模型是模型(Model)、模块(Template)、视图(View)的全栈 Web 开发模型。将上述得到的学习包输入形成数据集,在Python中导入Chatterbot和Flash库并进行训练。采用机器学习决策树对学习者特征的学习包进行构造,其由熵和信息增益组成[11],对熵以及信息增益进行计算,并对数据进行集成。
将数据集成后,将学习包作为功能模块应用于MTV模型,以此实现虚拟机器人交互系统的自主智能化交流。训练结束后结合model.predict函数对学习者交互指令进行分类测试,并反馈用户意图。其次,通过Django对已训练好的Chatterbot进行测试,指定端口服务。然后,通过创建FastAPL应用,并设置CORS中间件来搭建虚拟机器人的API。最后,导入训练好的Chatterbot模型库启动虚拟机器人智能指导交互系统。通过决策树构建的方式对模型精确度进行测试,模型储存并交互部署,确保学习者与虚拟机器人交互之间存在正向度迭代与控制,实现精准课程资源输出。
(三)过程逻辑:学习者与虚拟机器人交互
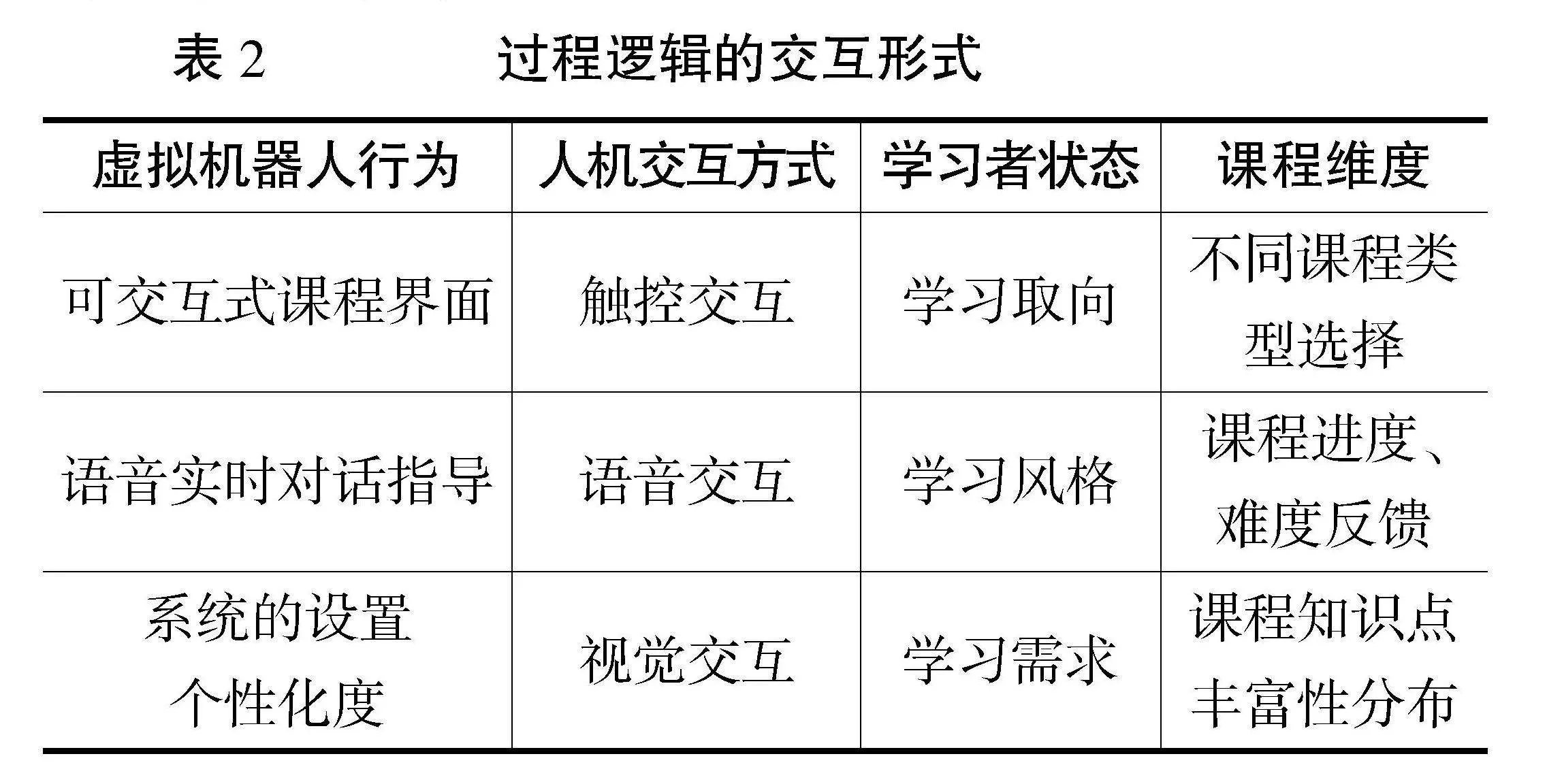
过程逻辑包括人机交互、应用场景及虚拟机器人行为三个维度。虚拟机器人通过集成多模态交互、语音识别及人工智能等技术,具备教育多维互动性等优势,增强了游戏化寓教于乐的学习体验[12]。虚拟机器人通过集成课程资源、自由对话的形式对教学资源进行了智能化运用与开发[13]。从过程逻辑(见表2)来看,通过触控交互、语音交互及视觉交互三个维度来实时关注学习者学习取向、学习风格及学习需求的状态,为其智能推荐不同课程类型与难易程度,强化学习者自主学习能力。
表2 过程逻辑的交互形式
首先,在经过用户逻辑和介质逻辑对虚拟机器人交互逻辑的计算后,对虚拟机器人进行验证与交互。利用虚拟AIROS通信机制,对决策树资源进行接收与储存。在ROS中创建新节点以储存不同类型学习者画像并实时更新迭代,通过ROS主节点传送至虚拟机器人课程交互中。其次,利用Google Cloud等云服务平台[14],将虚拟机器人对话系统与ROS中储存的学习包节点进行整合,达到共享信息目的。最后,通过实时云传输与更新进行功能,实时捕捉用户情感变化,及时更新画像特征,从而精准与学习者实时交互,以供开发者对相应功能进行更新。利用决策树根据学习者的属性标签,结合学习需求、学习取向及学习风格,进行个性化学习资源推荐;实时调整互动方式,动态生成适应不同类型学习者的学习包;实时迭代、传输至虚拟机器人交互系统中,以此针对不同课程达到陪伴学习者进行沉浸式学习的效果。
三、虚拟机器人智能指导交互系统的
人机感知设计实证
(一)学习数据感知获取和预处理
在众多在线学习平台中,Bilibili平台年轻用户居多,K12阶段相关课程类型与资源丰富,观看人数、点赞人数及弹幕评论人数庞大,且曾被上海指定为主流在线学习平台[15],故选取该平台进行实证分析。以Bilibili的偏文科课程(包括语文、英语、历史、地理课程)、偏理科课程(包括数学、化学、物理课程)以及偏艺术课程(包括美术、音乐课程)中学习者的情感评论作为数据源。
首先,通过Python解析Bilibili中三类课程播放量排名靠前的视频,获取三类课程学习者的交互行为(点赞、收藏、弹幕),获取感知数据15,160条。其次,结合Jieba库对数据文本进行预处理,把数据文本分词后,对无效内容、重复内容进行数据清洗,得到实际数据15,077条。最后,结合在线学习者在学习过程的情感偏向来建立在线学习情感辞典,对弹幕文本进行数据化处理,通过自定义停用词并增加分词、过滤对情感无影响词语后,剩余七类情绪有效数据14,570条。
再利用SnowNLP库进行情感分析。基于TextBlob进行中文自然语言分析,将正向度、负向度及中向度情绪标准样本分别归类后,通过SnowNLP对样本进行情感训练,再对数据时间分布情感趋势进行预测。结果如图2所示,在线学习者对在线学习课程的认可度相对较为积极,褒义向度情绪达50.2%,贬义向度情绪为29.5%,中性向度情绪为20.7%。每一个科目的情感分值分布均有所不同,偏理科课程的在线学习认可度高于偏文科课程及偏艺术课程;在线学习者对数学课程积极情绪最高,对英语课程积极情绪最低,分别为0.926930分和0.473489分。可见,在线学习者对于在线学习具有一定的认可度,但对部分科目存在一定消极情绪。因此,应将产生积极情绪相关课程的课程架构、教师风格属性及时输入至虚拟机器人智能指导交互系统中,并分析产生消极情绪课程内容和科目的缺点,并加以改进。
图2 学习者对不同课程的情感分值
(二)学习者画像分类与群体识别
得到在线学习者对不同课程情感分值后,使用无监督K-means聚类算法对学习者群体分类。通过SSW/SSB、SSW、SSB以及WB-index聚类评价指标[16]来进行类个数计算,如图3所示。SSW/SSB指标基本随k值呈稳定下降趋势,在拐点k=5时有一定波动。在WB-index中,在k=5时经历短暂上升拐点,k<5后,仍保持下降趋势。因此,主题数量为5时为相对最优聚类个数,此时群体差异显著性最大,故将学习者画像分为五个群体。
图3 聚类衡量指标随k值变化图
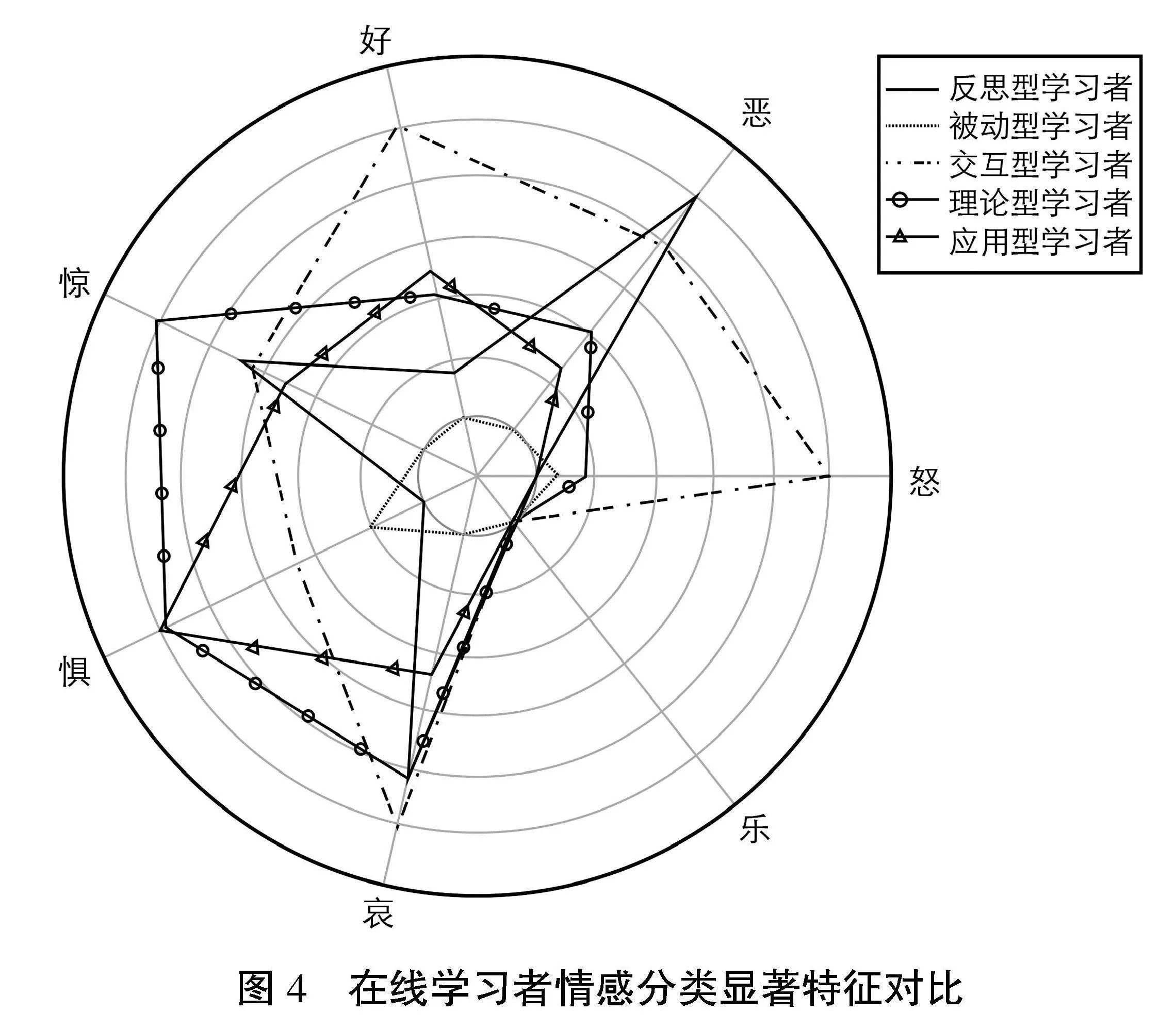
进一步对数据进行标准化处理。首先,将文本型数据和数据型数据输入,采用MinMaxScaler函数进行数据归一化,并计算五个聚类类别内部最显著特征数值。在读取每类的索引并获得数据特征后获得字符串形的描述性统计信息及最频繁值。其次,将数值型和字符串型特征进行合并,并将每个聚类下的数据特征进行追加。最后,输出聚类的特征信息并转化为矩阵,得到聚类矩阵图(如图4所示)。
图4 在线学习者情感分类显著特征对比
(三)学习包输出与虚拟机器人系统交互
1. 学习包输出
结合上述聚类矩阵图,将各类学习者的类型信息、情感特征及学习特征进行标签描述和学习包输出,得到学习包数据分为反思型学习者、被动型学习者、交互型学习者、理论型学习者以及应用型学习者五类,见表3。
第一,反思型学习者。此类学习者注重对学习内容的理解,弹幕发送频率适中,互动相对积极,倾向于复习线下所学知识及重点知识点解答两类学习需求。其偏向于选择偏理科课程及偏艺术课程,在学习过程中呈现低正向积极情绪表达。此类学习者学习取向一般,注意力水平尚可,多与学习内容互动,在重点知识点输出、有互动内容节点时的注意力较为集中。在融入虚拟机器人交互系统中要及时关注此类学习者的问题疑惑,提供专门的节点进行专属知识点解答服务,定期询问学习困惑并进行解答。
第二,被动型学习者。被动型学习者学习效率较低,多为被动地接受课程内容,会出现快进、倍速播放视频等行为。其学习取向较分散,注意力较弱,多被在线平台的其他功能转移注意力,出现与功能互动的低效学习行为。此类学习者的学习兴趣集中在对偏文科课程或偏艺术课程的复习层面,在观看时会产生低负面消极情绪表达,知识吸收较为被动。在融入虚拟机器人交互设计时,对教学内容设置要更为娱乐化,以融入游戏的方式加强注意力引导,并提供学习效率情感支持。
第三,交互型学习者。此类学习者注重学习过程中的交流与讨论,在学习中会产生正、负两种向度的反馈。从正向度来看,交互型学习者乐于发送弹幕与群体互动,起到鼓励自我、激励他人的学习效果。其学习兴趣范围集中于偏理科课程,在对知识点的预习和复习两个方面的学习需求上都比较积极。从负向度来看,交互型学习者由于实时关注弹幕内容,有时会产生注意力分散的情况,学习效率会受到一定影响。在融入虚拟机器人交互时应关注情感管理,设计回答问题环节与奖励机制,鼓励此类学习者提问与回答问题,促进学习正向互动。
第四,理论型学习者。理论型学习者多倾向于对学习内容的思考,尤其是偏理科课程。在学习过程中有具体的学习取向,体现出低正向积极情绪表达。此类学习者关注对预习、复习或知识扩展的学习需求,乐于与群体互动,通过同伴效应来促进学习。在融入虚拟机器人时,可设置知识点扩展问题环节,在虚拟机器人指导学习过程中提供更多知识点的扩展资料,以完善学习者的知识结构,提升此类学习者的学习兴趣。
第五,应用型学习者。应用型学习者学习效率较高,能够对知识点进行深入理解与思考。此类学习者表现出五类在线学习者中最高的情感特征,具有高正向积极情绪表达,学习活跃度较高。此类学习者多注重与偏文科或偏理科课程中的教育者进行互动,以此达到预习、复习、知识扩展或知识点解答的多维度学习需求。在融入虚拟机器人交互设计时,应设置个性化学术导师服务,提供实践性学习支持,提升此类学习者的学习体验。
2. 虚拟机器人交互系统设计与测试
将五类学习者的学习包输出并集成为语料库供虚拟机器人进行机器学习。随后进行数据训练,迭代方式为200次,得出匹配的语境标签。进一步对训练好的模型进行测试后,发现该系统交互精度为89.6%,得到虚拟机器人智能指导交互系统(如图5所示)。抽取54名五类学习者进行实践应用后发现,该系统显著提高了学生学习效率:反思型学习者79.3%、被动型学习者87.5%、交互型学习者95.4%、理论型学习者70.1%、应用型学习者90.4%。
虚拟机器人交互系统是通过虚拟机器人的用户逻辑、介质逻辑及过程逻辑的递进式交互设计来实现协同学习,主要以虚拟机器人课程交互系统作为直接强交互触点。虚拟机器人系统的客户端所配载的人机交互界面、音箱、无线麦克风及摄像头设备作为视觉伺服系统,与实际环境中学习者直接交互。而其软件系统中的微控制器与服务器端通信,是储存深度学习所集成的在线学习者画像数据的主要模块,可以实时获取学习者特征并进行间接匹配。因此,基于MTV模型的虚拟机器人交互系统设计,可以双向度保证虚拟机器人:一方面,通过机器学习来实时追踪现实环境学习者的情感状态变化与运动状态,以保持即时交流;另一方面,通过现有大数据来实时抓取更多数据源进行计算与分析,不断迭代新的学习者特征,实时进行学习内容、学习进度方面的调整,以此更为精准匹配实际学伴需求,更好地与硬件设施进行配合,发挥生成式人工智能的学伴价值。
四、虚拟机器人智能指导交互系统的
人机协同实践进路
对虚拟机器人智能指导交互系统实践进路的阐析是进一步审慎剖解虚拟机器人在人机协同维度的产品标准化设计的有效方式,通过上述数据化特征所构建的针对学习取向、学习风格、学习需求等方面的服务模式,提出其协同开发应聚焦的三个方面。
(一)个性化课程风格设计与引导,建立学习包以激发兴趣
基于不同类型学习者学习风格的数据化分析,建立个性化学习包,将学习者兴趣与学科需求匹配,激发学习者主动学习。(1)智能学习路径规划服务。虚拟机器人交互系统通过机器学习技术来预测实际学习者的学习风格,实时规划个性化学习路径[17],即时解决学习者在学习过程中出现的认知过载、注意力偏差等问题,从而智能矫正学习状态,实现知识结构有效迁移。(2)扁平化陪伴学习引导服务。虚拟机器人具有多维度身份拟合优势,可作为智慧导师与智慧学伴双重角色参与到学习者的学习过程中,在学习者学习兴趣缺乏阶段及时干预与互动,充分赋予学习者学习的主动权,弱化“教与学”的学习模式,营造自主学习的扁平化学习氛围。
(二)多维度课程智能推荐与取向,提升精准学习资源开发
虚拟机器人针对学生的学科取向和优势领域,提供多维度课程类型的智能推荐与指导,以此实现智能开发学习资源[18]。(1)颗粒化精准学习。虚拟机器人交互系统中输入学科课程相关数据,精准监测学习者学习状态。基于实时抓取学习者对不同课程的偏好,颗粒化学科知识,细化学习单元设计,并根据实时学习状态对学习单元动态调整,以确保单个学习单元的智能匹配度,减少过多知识大量堆积产生的学习负向度作用。(2)课程资源数字化糅合。对获取的课程资源与学习者取向通过决策树判断后,将素材型课程资源与条件型课程资源进行数字性糅合[19]。通过丰富的学习资源和教育技术[20]来补位学生知识结构的完整性,及时迭代学习可持续性,建立学科关联,确保学习者可获得与知识水平持平的有效学习资源,有利于培养学习者综合性学习能力。
(三)智能学习需求跟踪与反馈,强化自适应式课程干预颗粒度
虚拟机器人针对学习需求标签进行自适应学习进度跟踪与反馈,达到智能学习干预效果[21]。(1)人工智能实时追踪学习进度。利用机器学习算法和数据分析技术,对学生不同学习进度中的需求进行实时跟踪,挖掘出学习者实际问题并重点干预,消解其学习困境。人工智能实时追踪学习进度,弥补了传统教育存在的课后作业无法及时反馈的缺陷,通过AI实时多模态交互技术指导学习者完成课后作业,提高学习动机。(2)自适应式学习反馈与支持。关注实际学习者差异敏感性,自适应式进行学习反馈,根据具体学习情境与学习需求,智能调整课程资源类型、学科难度等,起到协同决策的教育指导效果。
五、结 束 语
本研究所提出的基于MTV模型的虚拟机器人智能指导交互系统作为新型智慧手段,多维度融合学习资源、学习情景与学习状态为一体,体现出更高的课程互动性和协作性价值。其有效地为人机协同挖掘学习者的行为与情感特征、个性化学习陪伴、精准学习资源推荐等方面提供了应用参考。该虚拟机器人具备较强的交互黏度,可及时按照学习者的学习需求、学习取向及学习风格进行智能化调整,对学习者进行“行为—生理—情绪”多维层面的学习监督、作业辅导、学习鼓励等人工智能交互与支持行为,进而达到“智慧学伴”协同学习目的。研究打破现有智能教育模式与教育机器人产品落地间的技术壁垒,为未来智慧教育的多维度融合提供借鉴,是“机器人+”在智慧教育中的实践性应用转向,以此构建人机协同自主式学习新范式。
[参考文献]
[1] CHIANG A H, TRIMI S, LO Y J. Emotion and service quality of anthropomorphic robots[J]. Technological forecasting and social change,2022(177):121550.
[2] 汪时冲,方海光,张鸽,等. 人工智能教育机器人支持下的新型“双师课堂”研究——兼论“人机协同”教学设计与未来展望[J]. 远程教育杂志,2019,37(2):25-32.
[3] 中华人民共和国教育部. 以数字化开辟教育发展新赛道[EB/OL]. (2023-10-13)[2024-04-24]. http://m.moe.gov.cn/jyb_xwfb/s5148/202310/t20231013_1085364.html.
[4] 工业和信息化部,教育部,公安部,等. 工业和信息化部等十七部门关于印发“机器人+”应用行动实施方案的通知[EB/OL]. (2023-01-18)[2024-04-24]. https://www.gov.cn/zhengce/zhengceku/2023-01/19/content_5738112.htm?eqid=88da4b8e0002741f000000026 48eb642.
[5] 公雪,刘秉新,张蓉菲,等. 两足教育机器人的历史发微与设计逻辑[J]. 现代远距离教育,2023(4):41-52.
[6] NASIR J, BRUNO B, CHETOUANI M, et al. What if social robots look for productive engagement? Automated assessment of goal-centric engagement in learning applications[J]. International journal of social robotics,2021,14(1):55-71.
[7] 林鸿飞,张冬瑜,杨亮,等. 情感隐喻计算及其应用研究[J]. 大连理工大学学报,2015,55(6):661-670.
[8] 杨阳,余维杰. 融合弹幕内容特征与行为特征的用户画像研究——以B站教学类视频为例[J]. 情报科学,2022,40(12):161-169.
[9] 晏齐宏. 舆论表达中的情感分层——以情感宽度为测量指标的分析[J]. 湖南师范大学社会科学学报,2022,51(3):144-156.
[10] REICH-STIEBERT N, EYSSEL F. Learning with educational companion robots? Toward attitudes on education robots, predictors of attitudes, and application potentials for education robots[J]. International journal of social robotics,2015,7(5):875-888.
[11] FORCIER J,BISSEX P,CHUN W J. Python web development with Django[M]. London: Addison-Wesley Professional,2008.
[12] CHANG C W, LEE J H, CHAO P Y, et al. Exploring the possibility of using humanoid robots as instructional tools for teaching a second language in primary school[J]. Journal of educational technology & society,2010,13(2):13-24.
[13] HUANG S. Design and development of educational robot teaching resources using artificial intelligence technology[J]. International journal of emerging technologies in learning,2021,16(5):116-129.
[14] GONG X. Enhancing brand consistency via integration of emotional graphic design and cloud service interface system[J]. The design journal,2023,26(4):673-684.
[15] 上海市教育委员会.汇聚长三角医学资源,打造在线教育金课[EB/OL]. (2020-06-09)[2024-04-24]. https://edu.sh.gov.cn/xwzx_jyjb/20200609/bb925d38dc834b6991d42dd599a4003f.html.
[16] ZHAO Q, FR?魧NTI P. WB-index: a sum-of-squares based index for cluster validity[J]. Data & knowledge engineering,2014,92:77-89.
[17] 周琴,文欣月. 从自适应到智适应:人工智能时代个性化学习新路径[J]. 现代教育管理,2020(9):89-96.
[18] 郑兰琴,高蕾,黄梓宸. 基于生成式人工智能技术的对话机器人能促进在线协作学习绩效吗?[J]. 电化教育研究,2024,45(3):70-76,84.
[19] 仇森,郭芳,黄荣怀. 基于信息科技课程标准的资源开发:原则、思路和路径[J]. 课程·教材·教法,2023,43(6):133-138.
[20] 俞树煜. 从辅助到创新:教育中技术作用的再认识[J]. 电化教育研究,2021,42(12):21-28,35.
[21] 武法提,高姝睿,田浩. 人机智能协同的精准学习干预:动因、模型与路向[J]. 电化教育研究,2022,43(4):70-76.
Collaborative Learning with Virtual Robots: Design and Practical Approach of
An Intelligent Guidance Interaction System
GONG Xue1, MA Zhengjing2, XIE Zhongqu3, LIU Bingxin4
(1.Institute of Art & Design, Nanjing Institute of Technology, Nanjing Jiangsu 210000;
2.Department of Engineering and Technology, China University of Geosciences, Beijing 100083;
3.Department of Mechanical Engineering, Nanjing University of Science and Technology, Nanjing Jiangsu 210000; 4.Fine Arts Academy, Northeast Normal University, Changchun Jilin 130000)
[Abstract] Virtual Robots, as a novel carrier of general artificial intelligence, have been emphasized for their significant multi-modal interaction advantages, empowering the digital transformation in education by supporting learners' autonomous learning. In order to improve its precision in intelligent collaborative learning for various courses, this study proposed a virtual robot intelligent guidance interaction system based on the MTV model, which aimed to analyze the loosely coupled relationship of virtual robot interactions through quantitative research methods. This study used the learning data of learners in different types of courses in K12, analyzed three types of interactions, namely learner-course interaction, learner-system interaction, and learner-virtual robot interaction together with the user logic, medium logic, and process logic in the design of the virtual robot interaction system, and constructed learners emotional preference labels. Combined with the ChatterBot machine learning algorithm, the state characteristics of five types of learners in K12 in the three dimensions of learning orientation, learning style and learning needs were excavated so as to enhance the precision of educational interaction with integrated virtual robots in Chinese educational environments. This study finds that the virtual robot intelligent guidance interaction system has significant advantages in personalized learning path guidance and multidimensional curriculum resource recommendation, providing practical references for the virtual robot to leverage the peer effect of "smart learning companion" and intelligent learning tracking.
[Keywords] Artificial Intelligence; Robot; Interaction Design; Educational Digitalization; Human-Computer Collaboration; Personalized Learning
DOI:10.13811/j.cnki.eer.2024.11.009
基金项目:2024年国家自然科学基金青年基金“可变构型野外山地四足机器人自主运动控制与设计方法研究”(项目编号:52305024);2022年度南京工程学院高等教育研究课题重点项目“新文科背景下工科院校美育课程群建设研究”(项目编号:2022ZD04)
