数据关联视角下高速公路多源机电状态管理
2024-12-04何国涛


摘 要:随着交通网络的不断扩展和智能化技术的快速发展,在高速公路系统中会产生大量的机电状态数据,包括车流量、车速、车道占有率等。这些数据来自不同的传感器和监测设备,具有异构性和多样性。为了更好地管理和维护高速公路系统,本研究提出了一种基于数据关联视角的高速公路多源机电状态融合管理方法。该方法建立数据关联模型,将不同源的机电状态数据进行融合,以提高数据的准确性和可靠性。试验结果表明,该方法在高速公路系统的机电状态管理方面取得了显著的效果。
关键词:高速公路;机电设备;多源数据融合
中图分类号:U 412" 文献标志码:A
高速公路系统是现代交通网络的重要组成部分,其安全和高效运行对社会经济发展至关重要[1]。随着交通流量的不断增加和用户需求的多样化,高速公路系统中产生的机电状态数据也越来越丰富。然而,这些数据来自不同的传感器和监测设备,存在异构性和多样性,给数据管理和维护带来了一定的挑战。因此,开发一种能够融合多源机电状态数据的管理方法,提高数据的准确性和可靠性,对高速公路系统运行和维护至关重要。
1 数据预处理
1.1 噪声清洗
采用聚类方式对远离期望值的数据点的数据进行清洗,可以将数据点分为不同的簇群,然后针对每个簇群进行分析和处理,可以使用聚类算法,例如K-means算法,将数据点聚类成多个簇群[2]。将远离期望值的数据点划分为离群点,并进行相应处理,例如移除或进行修正。通过计算其他正常数据的平均值,将该平均值应用于缺失数据点,可以尽量保持数据的一致性和完整性。对存在时间差的数据,可以采用正则匹配对数据进行过滤。正则匹配是一种基于规则的文本匹配方法,可以根据预设的模式匹配数据中的特定部分。通过设定匹配规则,可以筛选符合要求的数据,剔除不符合要求的数据,从而保留符合时间差要求的数据。这样可以保证数据的准确性和一致性,同时提高数据分析的可靠性。
1.2 数据压缩
主成分分析是一种常用的降维技术,通过线性变换将原始数据转换为一组新的变量,这些新的变量被称为主成分。主成分是原始数据中的线性组合,它们捕捉了原始数据中最大的方差,尽量保留了原始数据的信息。通过主成分分析,可以保留最重要的主成分,而舍弃次要的主成分[3]。这样可以降低数据的维度,从而对数据进行压缩。可以根据方差解释率来确定保留的主成分数量,方差解释率表示每个主成分所占总方差的比例。选择解释总方差较大的主成分,可以保留较多的信息,同时降低数据的维度。
1.3 数据转换
归一化是将数据映射到指定范围内的常用方法,可以使用公式(1)进行归一化处理。
归一化后的值=(xi-xmin)/(xmax-xmin)×(Ml-Mr)+Mr
(1)
反归一化是将归一化后的数据恢复到原始范围内的方法,可以使用公式(2)进行反归一化处理。
反归一化后的值=(归一化后的值-Mr)/(Ml-Mr)×(xmax-xmin)+xmin (2)
式中:归一化后的值为经过归一化处理后的值;Mr为映射的最左端;Ml为映射的最右端;xmin为数据的最小值;xmax为数据的最大值。
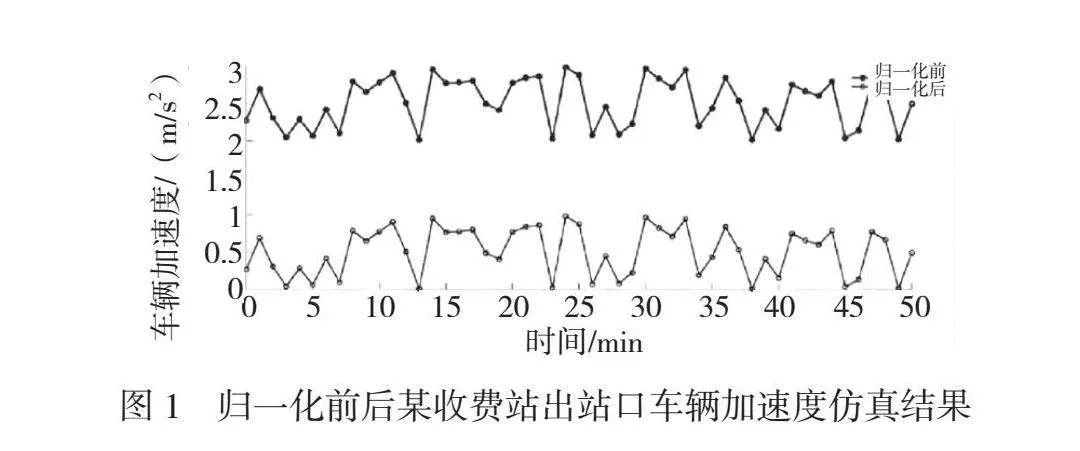
以50min内某收费站出站口车辆加速度为例,进行归一化试验分析。在归一化试验中,需要对采集的车辆加速度数据进行处理,使其具有相同的量纲和范围。常用的归一化方法有最小-最大归一化和Z-score归一化。最小-最大归一化是将原始数据线性转换到[0,1]。对每个数据点来说,将其减去数据集中的最小值,再除以最大值和最小值之间的差,这样可以将数据映射到0~1,保留了原始数据的相对大小和顺序。对每个数据点来说,将其减去数据集的均值,再除以数据集的标准差。这样可以使数据的均值为0,方差为1,使数据分布更加符合正态分布。当进行归一化试验分析时,比较归一化前后的加速度仿真结果。通过对比两者的变化情况,评估归一化对数据的影响。如果归一化后的仿真结果更加稳定和可靠,且能够更好地反映车辆加速度的特征,那么归一化是有效的。相反,如果归一化后的结果出现明显异常或失真,就需要重新评估归一化的方法或数据处理的步骤。归一化前后某收费站出站口车辆加速度仿真结果如图1所示,能够明显看出归一化后的车辆加速度明显下降。
2 多源数据融合处理
面向多源设备状态数据的融合处理方案如图2所示。该方案利用时空关联的同构多源数据融合。同构数据指的是具有相似的数据结构和特征的数据,这些数据通常来自不同的传感器或测量设备。通过分析这些同构数据之间的时空关系,可以将它们进行融合,得到更完整和一致的信息[4]。该方案采用基于神经网络的异构多源数据融合。异构数据指的是具有不同数据结构和特征的数据,这些数据来自不同的领域或类型。神经网络是一种强大的模型,可以学习和捕捉数据之间的复杂关系。通过利用神经网络的能力,可以将异构数据进行融合,以获得更全面的信息。通过将时空关联的同构多源数据融合和基于神经网络的异构多源数据融合相结合,该方案能够充分利用不同数据源的优势,并解决多源数据融合中的异构性和复杂性问题。
2.1 基于时空关联的同构多源数据融合
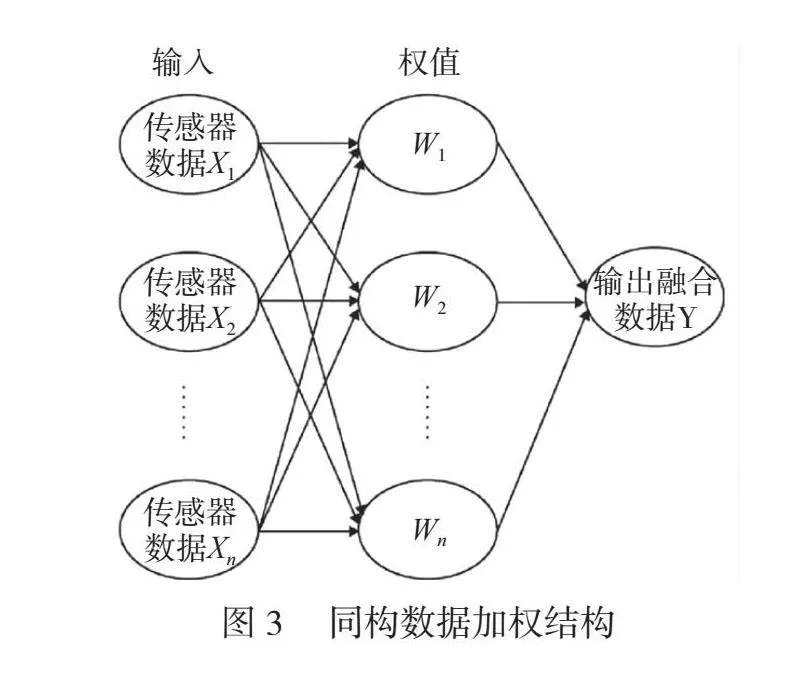
同构数据加权结构如图3所示。首先,利用时间关联度分析,可以对同一时间段内的不同传感器数据进行比较和评估。通过计算数据之间的相似性和相关性来确定它们之间的关联程度。可以将较弱关联度的数据剔除,以减少对数据融合结果的影响。其次,通过设定权值系数,可以对不同传感器数据进行加权处理[5]。可以根据传感器的可靠性、准确性和重要性设定权值系数。具有较高可靠性和准确性的传感器可以被赋予较高的权值,以增加其在数据融合中的贡献。这样可以使融合结果更加准确和可靠,同时也考虑了不同传感器的特点和优势。最后,通过加权数据融合方式,将经过筛选和加权处理后的数据进行融合。加权数据融合可以根据设定的权值系数对不同传感器数据进行加权平均或加权求和,得到最终的融合结果。
动态时间规整算法(DTW)是一种用来比较两个时间序列相似性的方法。通过在时间轴上对齐两个序列的数据点,找到使两个序列之间距离最小的对应关系。
初始化一个二维矩阵,大小为(m+1)×(n+1),其中m为Vi(t)的长度,n为Uj(t)的长度。将矩阵的第一行和第一列初始化为无穷大的值,表示初始状态下两个序列之间的距离为无穷大。从矩阵的(1,1)位置开始,计算每个位置的值。对矩阵中的每个位置(i,j),计算距离d=||Vi(t)[i]-Uj(t)[j]||,其中||·||为欧氏距离。在(i,j)位置的值等于d加上(i-1,j)位置、(i,j-1)位置和(i-1,j-1)位置中的最小值,即矩阵中前一步的最小路径和。最终得到的矩阵右下角的值即为两个序列之间的最小距离。根据动态时间规整算法得到的矩阵,可以得到两个序列之间的最小距离。EM表示极大似然估计值。设d为某一时刻传感器间距,根据欧氏距离计算公式,可以得到公式(3)。
d= sqrt(EM)" (3)
利用动态时间规整算法和欧氏距离计算设备间距,从而对某收费站不同加速度传感器设备数据序列进行分析和应用。
设d为某一时刻传感器间距,指数函数量化时空关联度是一种对设备间距进行标准化预处理的方法。通过使用指数函数来量化设备间距,使较大的间距得到较小的量化值,较小的间距得到较大的量化值。如公式(4)所示。
si,j = exp(-λ × di,j)" (4)
式中:si,j为量化后的设备间距;di,j为设备间距;λ为指数函数的参数,用于控制量化效果。通过公式(4),可以对设备间距进行标准化预处理,从而提取设备间距的时空关联度信息。
以某收费站出站口为例,感应线圈可以实时获取车辆通过的信息,这些数据对交通管理和规划具有重要意义。为了对这些数据进行融合处理,将采用两种常用的方法进行对比试验。首先,使用平均值法进行数据融合。平均值法是一种简单直接的融合方法,将所有采样的车流量数据的平均值作为最终结果。对60min内每隔5min采样得到的25个车流量数据进行平均计算,得到平均值融合结果。其次,采用自适应加权法进行数据融合。自适应加权法考虑到不同时间段或不同车流量数据的重要性和权重,最后,对数据进行加权处理,得到融合结果。在试验中,将根据车流量数据的大小和变化情况,设定不同的权重系数进行加权计算,得到自适应加权融合结果。融合处理方法结果对比情况如图4所示。
从图4可以看出,与平均值方法相比,基于时空关联的融合方法能够更好地捕捉数据的变化趋势和时序特征。采用平均值方法对多个数据进行平均处理,忽略了数据之间的时序关系,导致数据丧失平滑化和信息。而基于时空关联的方法考虑到数据在时间和空间上的关联性,能够更好地反映实际数据的变化规律,从而更接近真实数据。与自适应加权方法相比,基于时空关联的融合方法能够更好地处理数据之间的相关性和权重分配。自适应加权方法通过设定权重系数,对不同数据进行加权处理,确定权重系数存在主观性和固定性的问题。而基于时空关联的方法通过分析数据之间的关联程度和相似性,动态地调整权重,更合理地进行数据融合,从而缩小了误差。
2.2 基于神经网络的异构多源数据
预处理流量观测值:若fi为距离t时刻最近一个时刻的流量观测值;f为数据平均值,则计算预处理流量观测值如公式(5)所示。
fi' = fi/f" (5)
式中:fi'为预处理后的流量观测值。
基于神经网络的多源异构数据融合方法能够充分利用各个源数据的信息,提取数据的全局特征和局部特征,同时通过注意力机制网络对数据进行加权处理和特征提取。
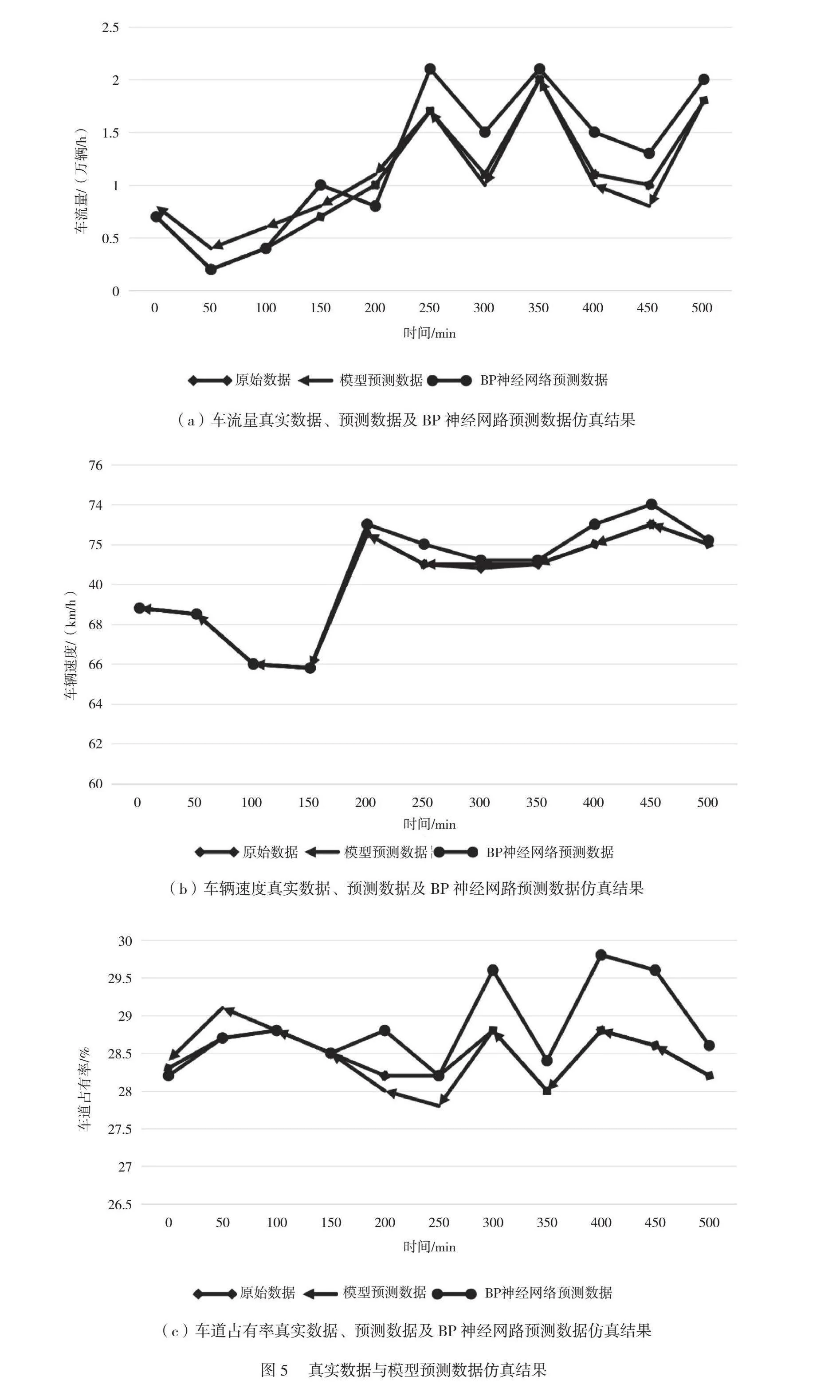
试验收集了某收费站出口的车流量、车辆速度和车道占有率3个指标的数据。这些数据是通过传感器、监控设备和车辆识别系统等收集而来的,具有一定的真实性和可靠性。真实数据与模型预测数据仿真结果如图5所示。
通过多次迭代和优化,得到了最佳的BP神经网络模型。预测结果可以与真实数据进行对比,评估预测的准确性和误差。为了更加直观地评估预测结果的准确性,利用Matlab软件进行仿真。将真实数据、BP神经网络预测数据和本文预测数据进行可视化比较,可以观察它们之间的差异和相似性。在对比分析中,发现基于BP神经网络的实际值与预测值在后期存在较大的误差,误差明显大于本文提出的多源异构数据融合方法,进一步验证了本文方法的有效性和优越性。
3 结语
本研究基于数据关联视角,提出了一种高速公路多源机电状态融合管理方法,旨在提高数据的准确性和可靠性。通过建立数据关联模型,将来自不同源的机电状态数据进行融合,本方法能够更好地理解和分析高速公路系统的机电状态。试验结果表明,本方法在高速公路系统的机电状态管理方面取得了显著的效果。
参考文献
[1] 李斌,郑凤飞,刘春芽.高速公路多源机电运维数据统一接入方法探究[J].中国交通信息化,2022(10):130-133.
[2] 王赛赛,高鹏.融合降雨数据的高速公路行驶速度预测[J].物联网技术,2021,11(3):43-50.
[3] 何刚,尹紫红,廖知勇,等.高速公路BIM+GIS多源数据集成与融合探析[J].科学技术创新,2021(15):4.
[4] 黄海政.高速公路隧道机电设备安装工程施工技术研究[J]. 工程机械与维修,2024 (4): 86-88.
[5] 吴志峰.探讨高速公路机电设备智能化管理策略[J].中国设备工程,2022(6):2.
