基于模型修饰的城市精细化三维模型构建
2024-11-29刘东鑫刘丹萍




摘要:为解决倾斜摄影自动生产的城市三维模型中存在的路灯悬浮、宣传牌破损等问题,文章探讨了模型修饰技术在解决上述问题、提升模型质量方面的应用。文章首先介绍了无人机倾斜摄影技术和三维模型制作流程,其次对目前主流的模型修饰技术进行介绍,然后对模型常见问题进行分析,并给出模型修饰措施,最后以某城市实景三维中国建设项目为例,对模型进行修饰,得到了精细化模型成果。研究结果表明,模型修饰技术能够有效解决城市三维模型中存在的常见问题,显著提升模型的精细化程度。
关键词:倾斜摄影;模型修饰;三维建模;精细化模型;实景三维中国
中图分类号:P231 文献标识码:A
文章编号:1009-3044(2024)27-0083-03
0 引言
实景三维中国建设是国家测绘地理信息发展的重要战略,旨在构建覆盖全国、统一规范、互联互通的三维空间信息资源。然而,传统倾斜摄影技术在三维模型自动生产过程中,由于航摄影像部分区域遮挡严重、获取影像时车辆发生位移、摄影测量软件解算精度不高等原因,导致模型存在路灯悬浮、宣传牌破损、车辆破损、建筑物结构变形等问题,难以满足实景三维中国建设对模型精度和质量的要求。为了解决自动生产的模型成果存在的问题,得到质量较高的模型成果,很多学者对此展开了研究。王萍[1]等人探讨了基于Smart3D和SVS软件生产实景三维模型的流程,在一定程度上提升了模型成果质量。董飞飞[2]等人采用多源数据融合的方式来生产高质量的实景三维模型成果。张懂庆[3]等人通过对比分析主流建模软件的优缺点,将不同软件的优点相结合,从而生产精细化模型。蔡占玲[4]以大同古城模型生成为例,探讨了精细化建模的关键技术。徐梦洁[5]和王小妹[6]等人从单体化技术入手,探讨了单体化技术在精细化模型生产中的应用,并得出基于单体化技术可以得到精细化模型成果。尽管众多学者对精细化模型制作进行了研究,但从效率和操作可行性来说,效率较低,操作难度高。本文旨在探讨模型修饰技术在城市精细化三维模型构建中的应用,通过对模型进行针对性的修复和优化,提升模型的精度、真实性和美观度,为实景三维中国建设提供高质量的数据基础。文章首先介绍了无人机倾斜摄影技术和三维模型制作流程,然后详细阐述了模型修饰技术的原理和方法,并结合具体案例,分析了模型修饰技术在解决城市三维模型常见问题方面的应用效果。本文的研究可以为模型修饰及精细化模型制作提供参考。
1 无人机倾斜摄影
无人机倾斜摄影是指在无人机上搭载多台航摄仪(一般为非量测数码相机),从空中对地面进行全方位、多角度、高分辨率、高重叠度影像数据的采集[7-8],经倾斜摄影软件处理后,可获得空三加密成果、三维模型、正射影像、数字表面模型等多种测绘产品。倾斜摄影技术凭借其多角度、高分辨率、高重叠度的优势,近年来在测绘地理信息领域得到迅速发展,并广泛应用于城市规划、灾害监测、文物保护等多个行业。
2 模型修饰
模型修饰是指采用纹理修饰或结构优化技术对模型进行处理,得到质量更高的模型成果[9-10]。目前模型修饰技术主要有两种,分别是纹理修饰和结构优化。纹理修饰是指对映射错误的纹理进行修改。这种方式不改变模型的结构,只对映射错误的纹理进行优化处理,适用于结构完整,纹理映射错误的模型。结构优化是指对模型结构进行修改,常见方法有压平模型、修补空洞、删除模型、拉伸结构等。这种优化方式可以得到结构与实际地物更相符的模型成果,适用于结构不完整的模型。基于模型修饰技术对模型进行优化处理,主要的作业流程如图1所示。
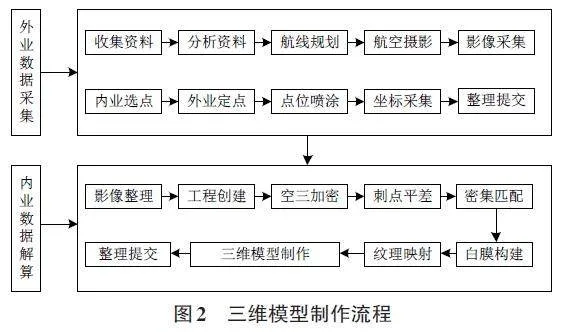
3 三维模型制作流程
该流程主要包含的内容有两部分,分别为外业数据的采集和内业数据的解算。外业数据的采集主要包括影像数据的采集和像控点数据的采集;内业数据的解算主要是指对航摄倾斜影像的解算,并基于空三加密成果完成其他测绘产品的制作。本文方案的自动化构建模型流程如图2所示。
4 模型常见问题分析及优化措施
4.1 路灯悬浮物问题分析及优化措施
路灯和树木的顶部通常较大,而中间部分则相对细小。在基于倾斜影像生产三维模型时,路灯和树木的中间部分常会出现断裂现象,形成所谓的“悬浮物”。影像解算的本质是对重叠区域影像上同一地物进行同名点匹配。在进行匹配之前,首先会通过特征点检测和提取算法,从海量影像中提取相同影像上的同名点,然后通过同名点匹配,纠正影像的空间位置和姿态。基于匹配得到的同名点,采用多视影像密集匹配算法,对影像进行解算,从而获取密集的点云数据。由于路灯和树木的中间部分较细小,因此密集匹配得到的点云数量较少。在基于密集点云构建三角网时,由于点云数量不足,导致构建的三角网出现不连续性问题,形成“悬浮物”。增加点云数量可以有效解决悬浮物问题。增加点云数量的方法包括采用三维激光扫描技术,对路灯和树木进行扫描,以获取更密集的点云数据;也可以使用长焦距相机或降低飞行高度,以获取分辨率更高的影像数据,从而解算出密度更高的点云数据。树木和路灯在实际应用中主要起到美化场景的作用,因此除了上述两种方法外,还可以采用外部模型植入的方式进行处理。具体来说,即删除原有的路灯和树木模型,将外部模型植入到场景中,然后调整其位置、大小和角度,以获得更高质量的模型成果。
4.2 宣传牌破损问题分析及优化措施
宣传牌一般是立方体结构,具有较长的长度、较高的宽度和较薄的厚度,一般为几毫米到几厘米不等。组成模型结构的最小单元是三角网,而三角网是基于密集点云构建而成的。目前主流的软件采用的三角网构建算法都是不规则三角网,该算法要求构建的三角网三边之和最小,且构建的三角网互不交叉、互不重叠。基于这一算法,在对宣传牌进行三角网构建时,由于宣传牌厚度较薄,因此会将宣传牌两侧的点云构建到同一个三角网中,导致同侧点云无法构建三角网,出现孔洞。对于这种问题的处理,目前主流的技术有两种,一种是模型修饰,一种是单体化。模型修饰首先是指利用修模软件对孔洞进行修补,然后以宣传牌平面为基准面,对高出基准面的部分进行压平处理,从而得到规整的宣传牌,最后对宣传牌纹理进行映射编辑,得到最终优化后的宣传牌。这种方式得到的精细化模型是在原模型之中的,与原始模型是一体的,不利于属性查询等操作。单体化是指基于恢复的虚拟立体像对,在立体环境下,采集宣传牌的结构,然后构建新的宣传牌模型。这种方式得到的模型是独立于原有模型的,可以对其属性进行查询等,可操作性强。上述这两种方案都可以得到精细化宣传牌模型,在实际作业中,须根据项目需求自行选择合适的优化措施。
4.3 车辆破损问题分析及优化措施
道路上的车辆通常处于动态状态,即在不同影像上,车辆的位置是不同的。在解算过程中,由于车辆位置不同,可能匹配出错误的同名点。在密集点云解算时,由于同名点是错误的,匹配出的密集点云也会不准确。在构建三角网时,基于错误的点云构建得到的三角网与实际情况不符,进而导致车辆出现大幅度的破损。对于道路上破损的车辆,最直接的处理方式是进行压平处理。即将车辆压平到路面上,然后联动Photo⁃shop软件,对错误的纹理进行编辑,以获得与实际道路相符、干净、整洁的道路面,从而提升模型成果的质量。
4.4 建筑物结构变形
对于建筑物模型来说,底部通常会存在一定的变形,其主要原因是建筑物底部属于航摄盲区,目前的影像解算算法无法对航摄盲区进行高精度同名点的解算,因此也无法匹配精确的密集点云。在构建白模时,由于缺少必要的顶点和边界点云数据,导致构建的三角网与建筑物实际结构不符,出现建筑物结构变形,纹理拉花。对于建筑物结构的优化处理,目前常用的方法有两种,即建筑物结构编辑和单体化模型制作。建筑物结构编辑是指在已有模型上,对建筑物的边界或顶点进行拉伸处理,使建筑物边界互相垂直,更加笔直。建筑物单体化是指在立体环境下,采集建筑物的顶点、边界,通过拉伸、缩放等方式,从而重新构建一个建筑物体。基于建筑物结构编辑和单体化方式,都可以得到高质量三维模型成果。
5 案例分析
某城市开展实景三维中国建设项目,需要生产实景三维模型。结合图2的作业流程,选用六旋翼无人机搭载5镜头相机进行倾斜影像数据的采集,共采集倾斜影像数据100 500张,POS数据20 100个。使用Context Capture软件加载影像和POS数据,并进行空中三角测量解算和三维模型生产。通过交互式软件对模型成果进行查看,发现模型存在道路两侧路灯悬浮物、宣传牌破损、路面车辆破损、部分建筑物结构变形等问题。这些问题影响模型整体的质量,需要对其进行优化处理。本文在对模型修饰技术进行深入分析后,采用模型修饰方式来优化本次生产的模型成果。
对于宣传牌破损的问题,采用结构重构技术进行优化处理。首先对孔洞进行修补,确保破损区域无孔洞,然后对宣传牌两侧的结构进行压平处理,确保侧面的三角网顶点都位于同一个立面上,最后对模型纹理进行编辑修饰,使其纹理与周边纹理过渡自然,与实际现状相符。如图3所示,是宣传牌破损优化前后对比图。
对于路面车辆破损的问题,直接采用模型压平的方式,对车辆进行压平处理,然后对压平后的纹理进行优化处理,使其与周边纹理过渡自然,符合道路实际情况。如图4所示,是路面破损车辆优化前后对比图。
对于建筑物结构变形的问题,采用修模软件中的结构拉伸功能,结合建筑物实际的位置和结构,对变形建筑物的顶点或者边界线进行拉伸,使其与建筑物实际结构一致,然后编辑纹理,得到与实际一致的建筑物模型成果。如图5所示,是建筑物结构变形优化前后的对比图。
通过人机交互的方式查看图3、图4和图5的成果,通过对比分析,采用本文的优化方案,对问题模型进行优化,可以得到更精细的模型。
6 结束语
本文研究了模型修饰技术在城市精细化三维模型构建中的应用,通过对路灯悬浮、宣传牌破损、车辆破损、建筑物结构变形问题的分析,提出了多种切实可行的解决方案,并通过案例验证了方案的可行性和有效性。本文的研究结果为城市精细化三维模型的构建提供了新的思路和方法,具有一定的理论意义和应用价值。未来可以进一步研究如何将模型修饰技术与人工智能、深度学习等技术相结合,以实现更加自动化和智能化的三维模型精细化处理。
参考文献:
[1] 王萍,魏军,苟彦梅.基于Smart3D和SVS软件的实景三维模型生产[J].测绘标准化,2022,38(4):15-19.
[2] 董飞飞,许懿娜,孙越乔.多源影像实景三维融合建模及关键问题研究[J].现代测绘,2022,45(5):9-13.
[3] 张懂庆,魏军,王萍.三种倾斜摄影建模软件对比分析[J].测绘技术装备,2022,24(3):114-119.
[4] 蔡占玲.大同古城精细三维建模关键技术研究[J].城市勘测,2020(3):108-111.
[5] 徐梦洁,郑朝峰,季晓菲.基于无人机数据的精细化模型制作研究[J].电脑知识与技术,2024,20(15):97-98,101.
[6] 王小妹,王雯雯.基于无人机倾斜摄影的精细化三维模型制作研究[J].电脑知识与技术,2024,20(14):104-106,109.
[7] 冯思伟,颜军,刘璐铭,等.无人机倾斜摄影精细化模型构建及应用[J].测绘与空间地理信息,2024,47(6):48-50,54.
[8] 孙志强,马杰,刘津怿.无人机倾斜摄影在实景三维建设中的应用[J].测绘与空间地理信息,2024,47(S1):350-352.
[9] 张一璞.基于无人机倾斜摄影技术的精细化实景三维模型制作研究[J].信息记录材料,2024,25(6):239-241.
[10] 朱立波,黄文骞,石志远,等.倾斜摄影三维建模及不同软件修模效果分析[J].地理空间信息,2023,21(10):104-107.
【通联编辑:梁书】