基于仿生原理的六足机器人研制
2024-11-05孙慧超何林霖蒋雯雯樊伊凡张嘉骏

摘 要:六足机器人是一种仿生机器人,受到自然界昆虫的启发,具有良好的适应性和灵活性。该机器人设计采用六条腿进行移动,能够在各种复杂地形中行进,并具备稳定性和携带装备功能。通过仿生原理,结合机器人技术和生物学知识,通过持续研制和实验,拓展其在探索危险环境、灾害救援和科学研究等领域的应用。
关键词:仿生原理;六足机器人;结构设计;功能测试;舵机运动控制
中图分类号:TP242 文献标志码:A 文章编号:2095-2945(2024)30-0032-04
Abstract: Hexapod robot is a kind of bionic robot inspired by insects in nature and has good adaptability and flexibility. The robot is designed to move on six legs, can travel in a variety of complex terrains, and has stability and the ability to carry equipment. Through biomimetic principles, in combination with robotic technology and biological knowledge, and through continuous development and experiments, expand its application in fields such as exploring dangerous environments, disaster rescue and scientific research.
Keywords: biomimetic principle; hexapod robot; structural design; functional testing; steering gear motion control
为了推动科学技术的发展和人类社会的进步,人们不断探索和研究那些无法到达且可能危及生命的特殊环境,寻求解决问题的方法。六足机器人开发项目旨在利用先进技术仿生原理,创造一种可以进入危险环境、开拓未知领域的机器人,从而推动科学技术的发展并服务于人类社会的需求[1]。目前陆地作业中常用的移动机器人主要有3种类型:履带式、轮式和足式机器人。它们各有特点,比如轮式机器人可以在较为平坦的地形上行驶,运动稳定移动简单,但动力不足无法跨越障碍,不适用于艰难崎岖的路面;多足机器人状态不稳定,行走时易发生倾倒,采用静态步态行走时速度缓慢;履带式机器人运动时噪音较大,运行速度较低,转向较为费劲[2]。
六足机器人具有良好的适应性和机动性,可以在各种复杂地形上行走,如崎岖的山地、不规则的表面或其他不平坦的地形,它们的六只腿使得它们能够平稳地通过障碍物,跨越狭窄的缝隙或穿越不同高度的地形,可以爬过倒塌的建筑物、破碎的地面或其他障碍物,搜寻幸存者,提供紧急救援。同时,六足机器人在未知或恶劣的环境中也具有较强的探索能力,例如,在外太空、深海或其他无法轻易到达的地方,六足机器人可以克服重力、水压等困难,探索并搜集数据。
我国六足机器人的起步比国外更晚,但也仍取得了一些成就。西南科技大学在2016年成功研发了一款体型庞大的,可以承载500 kg重物的重载液压驱动六足机器人。机器人腿部配有3个液压油缸,利用液压泵对其进行精准控制,让他们彼此配合,共同作用,使六足机器人的腿部关节能够灵活转动,从而实现机器人的行走功能。通过液压泵对腿部3个油缸的精准控制,实现3个关节的灵活转动,从而使机器人能够完成行走动作[3]。太原理工大学研究的步履式六足机器人,有2种运行情况,一种是在平整路面上,主要依赖足部的履带来进行高效移动;另一种是在遇到障碍物或者崎岖路面上,该机器人可以切换至多足爬行模式进行越障。这款六足机器人不仅运动速度快功能性强,而且整体结构稳固,其中在采用履带模式行进时,六足机器人速度可达0.7 m/s[4],具有很高的实用价值。到2021年,西南石油大学研制出了一款水陆两栖六足机器人,与常规的结构不同,该机器人的机身是半球形的设计,可以封闭它的控制电路,保证在水中工作的安全性和稳定性。另外机器人的腿部采用了足式复合的运动结构,这种设计使得机器人在水下环境中能够灵活移动。而在各个关节处,特别配备了能够喷水的电机。这样,在水下环境中,只需简单调整这些喷水电机的转速,就可以实现对机器人运动状态的精确控制,使得机器人能够轻松自如地运动。其六足位置以中心对称的方式均匀分布在机身上,使得机器人能够在陆地和水域中自由穿梭[5]。
1 六足机器人原理样机设计
六足机器人与四足机器人有着不同的优势和特点。六足机器人依靠多足的特点,在行走时能保持较好的稳定性,避免倾倒的情况发生,并且通过合理的步态设计,可以实现静态步态行走,从而提高行进效率和负重能力。相比之下,传统的四足机器人在实现静态步态时需要单独迈出每一条腿,速度相对较慢。相较于更多足的机器人而言,六足机器人结构更加简单,因此在维护方面会更加方便快捷,适应能力更强,这使六足机器人在某些特定的应用场景中具备了明显的竞争力。
1.1 仿生原理
通过模仿蜘蛛的外观和运动节律,借鉴昆虫和节肢动物的多足结构,设计出能够通过合作运动实现高效的移动和稳定的姿态控制的六足机器人。它可以利用多条腿来支撑和平衡机体,保持稳定的姿态,通过合理地分配腿部运动和支撑,实现机器人在各种地形和环境中的稳定移动;根据生物运动学原理,优化六足机器人的步态设计,使其能够高效地行走和转向[6]。通过模拟昆虫的步态、脚部运动规律等,提高机器人的运动效率和适应性;借鉴生物的感知系统和神经控制机制,为六足机器人设计高效的传感器系统和智能控制算法[7];通过感知环境信息并实时调整步态和姿态,使机器人能够智能应对复杂的环境和任务需求。
同时在设计过程中要考虑机器人的灵活性、韧性和适应性,以应对各种挑战和变化。
1.2 六足机器人结构设计
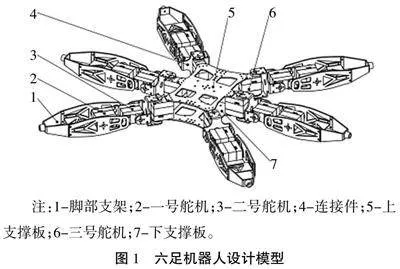
六足机器人的机身采用独特的八边形设计,其中部较长而两侧较窄,并在中部向里收敛,巧妙地扩大了腿部活动范围,为机器人提供了更广阔的运动空间。腿部的设计灵感来源于蜘蛛的腿部结构,六足在机身两侧呈对称分布,这样的布局不仅优化了空间使用,还极大增强了机体的稳定性。在每条腿都配有3个舵机,即3个活动关节,并通过转动副连接,这意味着每条腿都拥有3个自由度,确保了腿部运动的灵活性和稳定性。通过这种设计,我们实现了腿部活动范围的最大化,即便在有限的空间内,机器人也能展现出出色的运动能力[8]。根据以上,我们通过建模软件建立零件图,并装配出六足机器人,如图1所示。
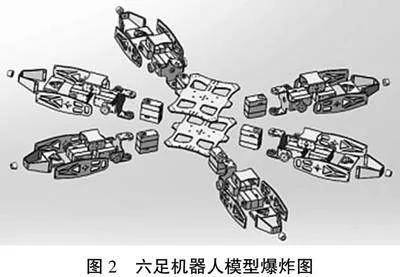
脚部支架让六足机器人受力均匀,每条腿上都有一、二、三号舵机和连接件,一共18个舵机单元可独立控制,也可分别配合,使六足机器人更加灵活,能够完成更多的动作指令,上下两个支撑板可放置主控制板、电池和传感器,增强了实用性。同时,为了更好地观看分析机器人的结构特点,便于后续组装,我们又做了其爆炸图及动画,如图2所示。
2 硬件部分
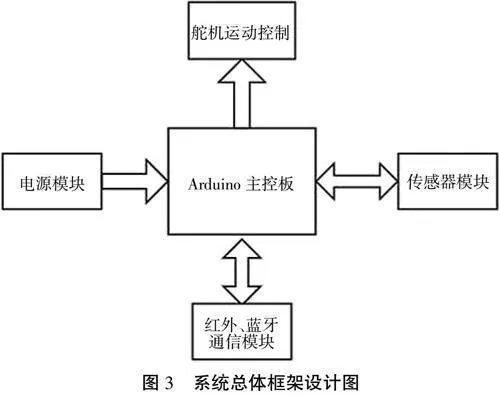
六足机器人的硬件部分总体框架如图3所示,主要包括Arduino主控板、外部的舵机模块、电源模块和传感器模块,红外和蓝牙传输模块。以Arduino主控板作为六足机器人的核心控制器,主控板集PWM舵机控制、总线设备控制(总线舵机、总线电机、总线MP3等)和众多控制方式(USB、串口、手柄和红外等)为一体,拥有丰富的外部接口,运算高效同时还可以保持较低的能耗,满足六足机器人所需的控制要求。
2.1 传感器模块
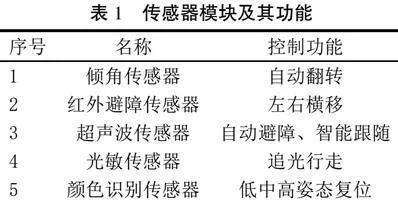
为了实时采集六足机器人工作时周围的环境信息,并能有效进行反馈控制,我们设计了相关传感器模块,见表1。
2.2 舵机运动控制
舵机的转动可以用PWM(pulse width modulation)来实现。通过调整PWM波的占空比控制舵机的旋转角度,六足机器人可以实现多种工作模式。270°角度的正反转、360°的定时连续旋转、360°的定圈连续旋转等模式可切换[9],通过单总线通讯,波特率115 200,每个舵机之间通过总线串联。每条腿的关节处均装备了舵机,负责驱动关节进行转动。这6个舵机固定于特定位置,协同工作以推动机器人实现前进、后退和行走等动作,完成操作员设定的相关任务。其中,每条腿与躯干连接的地方均设有2个舵机,分别负责控制足的转动以及足的抬起与放下。此外,还有一个舵机用于连接支撑部分,实现下半部分足的升降。整个运动控制系统由18个舵机组成,每条腿配备3个,确保机器人能够顺畅地执行各项功能[10]。
3 功能测试
通过不同终端使六足机器人拥有更多功能,如使用红外遥控控制器,实现蜘蛛复位、蜷缩、切换功能、低姿快速、防御、低姿左转、低姿右转、低姿后退、左右移动、手势移动、自由避障和定距跟随等功能;使用手柄控制,实现前进、后退、转向、姿态转换和防御等简单动作;建立基本MP3模块,实现相应条件下语音和音乐功能等。
3.1 zide软件、mixly软件与传感器选择
本项目六足机器人的一切运动,都离不开zide软件动作的开发、mixly编程与传感器的适当安装。
在zide软件中,首先,为了区分不同的舵机身份,设置可辨别同时有合理规律的ID。接下来,设置各个舵机PWM值,控制每个舵机旋转角度,形成一个静止形态,由多个静止形态合并组成一个动作组,并设置TIME值使各个静止状态之间在设定好的时间内完成转换,以此实现我们想要的动作。这为六足机器人所有行动与智能功能打下基础。通过一个蓝牙模块与手柄连接,并在zide软件上对手柄的每个按键与具体行动联系配置,从而基本实现了手柄的各项功能。
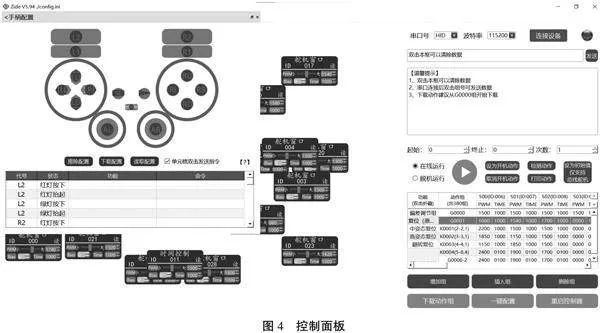
在以上工作基础上,使用mixly编程,先将红外遥控器的按键与功能对应,通过代码使相应的传感器在收到按键信号后开始工作,传感器通过具体情况产生信号传给Z-LINK模块,该模块收到传感器信号后按照编程要求的行为控制主板实现运动,以此实现复杂功能[11]。编好代码后将所编写程序下载到连接六足蜘蛛机器人主板的Z-LINK模板,将各所需传感器安装到Z-LINK模块对应接口,以此实现红外遥控的功能,如图4所示。以上功能实现的传导路径,也是我们着手实现蜘蛛智能化运动的实践思路,可进一步概括为“红外控制器-ZLINK-传感器-ZLINK-主板-舵机-具体运动”。
3.2 MP3功能模块的实现
本项目六足仿生机器人所采用的MP3模块为总线模块,可使用总线串联到控制器中。其中,在喇叭接口接入功率不超过3 W的喇叭(功率过大容易导致发热损坏,影响使用时效)。总线接口则用于指令信息的传输及模块的供电,通过单片机系统对单总线接口S信号口发送TDX,即可完成对模块的控制。此外,TF卡插槽也是完成此模块功能不可或缺的部分,其支持MP3等多种格式的语音文件,为语音模块功能的实现提供可能。
3.3 开机自动运行测试
设置开机动作,根据路径规划和环境感知结果,机器人会控制六条腿的运动,实现前进、后退、转向和爬坡等动作,动作控制精准度高,确保机器人按照预定路径顺利移动,可在上位机软件中直接设置,或是通过指令设置,前者较为简单但只能设置一个动作,后者更加灵活,但对操作要求更高,需要扎实掌握控制指令。我们团队在综合考虑与具体多次实践中,最终使用了指令设置开机动作的方法,如图5所示。
4 结论
实验发现,六足机器人可以在不稳定的表面上行走,并使用各种传感器来感知和分析周围环境;它们的稳定性和强大的机械结构使其能够携带重量较大的物体,可以用于运输和搬运重物,并在狭小或拥挤的空间中进行精确操控。因此,可以在工业生产、建筑工地或其他需要大量物品搬运的场景中发挥重要作用。
总的来说,六足机器人在应对复杂地形、灾难救援、探索未知环境和运输搬运等方面具有独特的优势,它的灵活性与强适应性可以解决一些传统机器人难以克服的困难,应用范围更广。随着技术的不断发展,在未来提升六足机器人的运动效率和智能控制,增加它的学习能力,六足机器人的应用前景将会更加广阔。
参考文献:
[1] 刘心怡.仿生六足机器瓢虫[J].农村青少年科学探究,2019(5):14-15.
[2] 马鑫,吴银川.六足机器人控制系统设计[J].仪器仪表用户,2023,30(6):14-18.
[3] 李昔学,留沧海,刘佳生,等.大型重载液压驱动六足机器人样机实验[J].机械设计与研究,2016,32(6):28-31.
[4] 杨政,马春燕,窦银科,等.步履式全地形六足机器人[J].液压与气动,2022,46(1):109-116.
[5] 王宇,周爽,李亚鑫.水陆两栖六足机器人的设计与性能评估[J].中国机械工程,2022,33(17):2079-2086.
[6] 何东伦,孙晓雪,徐刘杰,等.仿生六足机器人的发展现状与应用[J].设备监理,2022(6):66-68,87.
[7] 张赛男,邱晓荣.智能家居环境下六足机器人的设计与实现[J].电脑知识与技术,2022,18(9):86-88.
[8] 黄俊军,葛世荣,曹为.多足步行机器人研究状况及展望[J].机床与液压,2008(5):187-191.
[9] 韩凯,张其虎.六足仿生机器人设计与实现[J].内燃机与配件,2020(15):194-195.
[10] 张维泉,黄小芬,刘梓洪,等.灾区探索六足机器人的设计[J].信息技术与信息化,2021(9):231-233.
[11] 王晓磊,王雪涛,孙丹丹,等.一种新型轮腿四足机器人腿部机构结构参数优化[J].机电工程,2022,39(4):547-553.
基金项目:吉林省高等教育教学改革研究课题(JLJY202364001414);2023年国家级大学生创新创业训练计划项目(202310183111)
第一作者简介:孙慧超(1981-),男,博士,正高级工程师。研究方向为智能制造。