基于启发式能耗优化的电力仓储分布式多AGV路径规划方法
2024-11-04廉胤东苟彬李超磊李泽明余锦伟曾俊海





摘要:针对电力仓储环境下多自动导引车(AGV)系统的任务效率较低、能耗较高的问题,提出一种基于启发式能耗优化的电力仓储分布式多AGV路径规划方法。首先,提出两轮差速驱动AGV运动模型,引入驱动电机参数;然后,通过分析AGV车载锂电池的放电特性,建立AGV能耗模型;接着,分析AGV的主要能耗环节与路径网络特性,提出增加有限路径网络资源利用率、减少AGV移动时间的节能策略,并在AGV运动规划过程中引入时间约束;最后,提出一种改进时间约束的启发式路径规划方法,将能耗转化为路径网络占用时间,以实现系统能耗最小。数值模拟实验数据表明,该方法提高了多AGV系统的任务效率,有效降低了系统能耗。
关键词:多AGV系统;路径规划;能耗优化;启发式搜索算法;电力仓储;分布式规划
中图分类号:TP242.6 文献标志码:A 文章编号:1674-2605(2024)05-0006-08
DOI:10.3969/j.issn.1674-2605.2024.05.006 开放获取
Distributed Multi-AGV Path Planning Method Based on Heuristic Energy Consumption Optimization for Power Storage
LIAN Yindong1 GOU Bin2 LI Chaolei1 LI Zeming1 YU Jinwei3 ZENG Junhai4
(1.Southern Power Grid Supply Chain Technology (Guangdong) Co., Ltd., Guangzhou 510630, China
2.Electric Power Research Institute of Guangdong Power Grid Co., Ltd., Guangzhou 510062, China
3.Guangdong Research Institute of China Telecom Corporation Limited, Guangzhou 510660, China
4.School of Automation Science and Engineering, South China University of Technology,
Guangzhou 510641, China)
Abstract: A distributed multi-AGV path planning method based on heuristic energy optimization for power storage is proposed to address the issues of low task efficiency and high energy consumption in mulka/xbie9nh6tURhYhzXtsQ==ti-AGV systems in the power storage environment. Firstly, a two wheel differential drive AGV motion model is proposed, and the driving motor parameters are introduced; Then, by analyzing the discharge characteristics of AGV onboard lithium batteries, an AGV energy consumption model is established; Next, analyze the main energy consumption links and path network characteristics of AGV, propose energy-saving strategies to increase the utilization of limited path network resources and reduce AGV movement time, and introduce time constraints in the AGV motion planning process; Finally, a heuristic path planning method with improved time constraints is proposed, which converts energy consumption into the time occupied by the path network to achieve the minimum system energy consumption. Numerical simulation experimental data shows that this method improves the task efficiency of multi-AGV systems and effectively reduces system energy consumption.
Keywords: multi-AGV system; path planning; energy consumption optimization; heuristic search algorithm; power storage; distributed planning
0 引言
随着工业4.0的深入推进,越来越多的工业工厂利用高度自动化的智能仓库系统作为提升竞争力的关键手段[1]。智能仓库系统凭借灵活的解决方案,在降低人力、时间及运营成本的同时,确保了仓库运营任务的高效执行。在智能仓库系统中,自动导引车(automated guided vehicle, AGV)主要用于运输与货物分拣,其数量可达数十甚至上百台[2]。在仓库有限的空间内,多AGV需沿着特定的路线移动,其路径规划及避障策略直接影响仓库运营的效率与灵活性。因此,在多AGV协同作业的环境下,有效解决冲突并优化有限路径网络资源的利用率尤为重要[3]。此外,多AGV系统的节能问题至今仍缺乏有效的解决方案[4-5]。
近年来,研究人员提出了多种机器人规划和避障方法[6-7]及节能运动规划方法[8-9]。文献[10]提出一种基于Petri网分解的算法,旨在精确计算最短且可行的AGV路径方案;但多AGV间存在的冲突避让机制可能使其选择次优路径,甚至引发死锁现象[11]。文献[12]将静态路径规划问题重构为基于时间的Petri网最优序列求解问题,有效解决了多AGV间的冲突与死锁问题;但其规划的路径增加了AGV的运动距离,降低了任务效率。文献[13]提出一种包含三步平滑处理的改进A*算法,通过对规划路径上的节点进行冗余滤波与插值平滑,提升了路径平滑度,有效缩短了整体路径长度;但该算法不适用于多AGV系统的固定网格路径规划。文献[14]在传统A*算法的基础上,融入了预处理与后处理步骤,考虑了无障碍碰撞的情形,确保规划的局部路径的节点数量与距离均最小,进而实现全局路径最优;但多AGV因避让而产生了较长的等待时间,降低了协同任务的效率。从多AGV系统节能的角度来看,机器人运动规划的优化流程尤为重要[15]。文献[16]提出一种最小能量速度规划策略,
与梯形速度曲线相比,该策略电池能量节约达10%;但其计算复杂度较高,不适用于实时场景。文献[17]提出的节能运动规划方法,相较于基于任务效率的方法,能耗节约达42%;但该方法主要对AGV单次任务的能量效率进行规划,无法满足长期、连续任务的要求。多AGV系统节能的另一策略是将最短路径长度作为目标函数的考虑因素,以实现能耗最小化[18]。文献[19]利用动能损失测试来评估机器人在动态环境下的节能运动性能,并通过优化机器人的步态规划、动力学模型、动力分配算法等,提高了机器人的能源利用效率;但节能设计在一定程度上降低了机器人的任务效率。文献[20]通过减少机器人的转向驱动,实现了能耗最小化;利用多项式参数化寻求可行轨迹,考虑了边界条件、运动学约束和避障准则,提高了路径的利用效率;但该方法在多AGV动态变化场景下适应性较差。文献[21]在轨迹规划阶段,对生成的路径进行平滑处理,一定程度上降低了机器人运动过程中不必要的能耗;但需要进一步提升动态障碍物环境下的实时避障能力。
本文提出一种基于启发式能耗优化的电力仓储分布式多AGV路径规划方法。首先,分析单台AGV的运动模型,结合电机特性和车载锂电池的放电特性,建立AGV能耗模型;然后,提出一种适用于多AGV系统分布式架构的启发式路径规划方法,提高了多AGV系统的任务效率,同时降低了系统能耗。
1 AGV运动模型和能耗模型
1.1 两轮差速驱动AGV的运动模型
两轮差速驱动AGV模型是多AGV系统中常见的模型,具有较高的灵活性和可靠性,示意图如图1所示。
图1中,AGV的质量中心为C,左、右驱动轮的中心分别为 和 ,左、右驱动轮中心之间的距离为 ,左、右驱动轮的线速度分别为 、 ,AGV旋转的瞬时速度中心为 ,AGV在运动平面旋转产生的角速度为 ,左、右驱动轮沿轮心旋转产生的角速度分别为 、 。
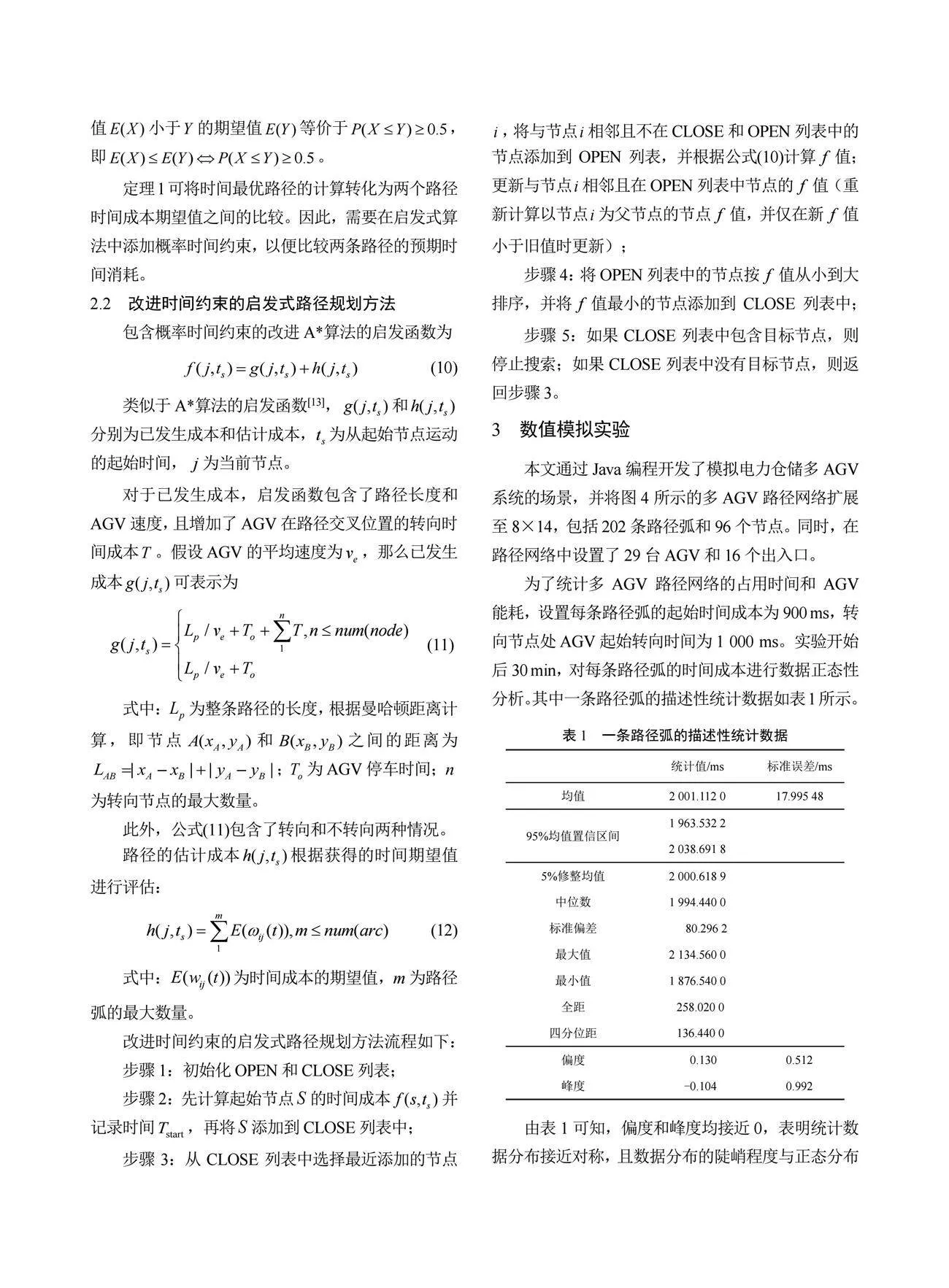
3 数值模拟实验
本文通过Java编程开发了模拟电力仓储多AGV系统的场景,并将图4所示的多AGV路径网络扩展至8×14,包括202条路径弧和96个节点。同时,在路径网络中设置了29台AGV和16个出入口。
为了统计多AGV路径网络的占用时间和AGV能耗,设置每条路径弧的起始时间成本为900 ms,转向节点处AGV起始转向时间为1 000 ms。实验开始后30 min,对每条路径弧的时间成本进行数据正态性分析。其中一条路径弧的描述性统计数据如表1所示。
由表1可知,偏度和峰度均接近0,表明统计数据分布接近对称,且数据分布的陡峭程度与正态分布相似,没有过多的极端值,服从正态分布。
正态性检验如表2所示。
由表2可知,Kolmogorov-Smirnov (KS)和Shapiro-Wilk (SW)检验显著性均大于0.05,进一步证明了该段路径弧成本的统计数据服从正态分布[24]。实验中其他路径弧的成本统计数据均符合正态分布,可取其均值作为该段弧的路径成本,并在每30 min后进行更新。
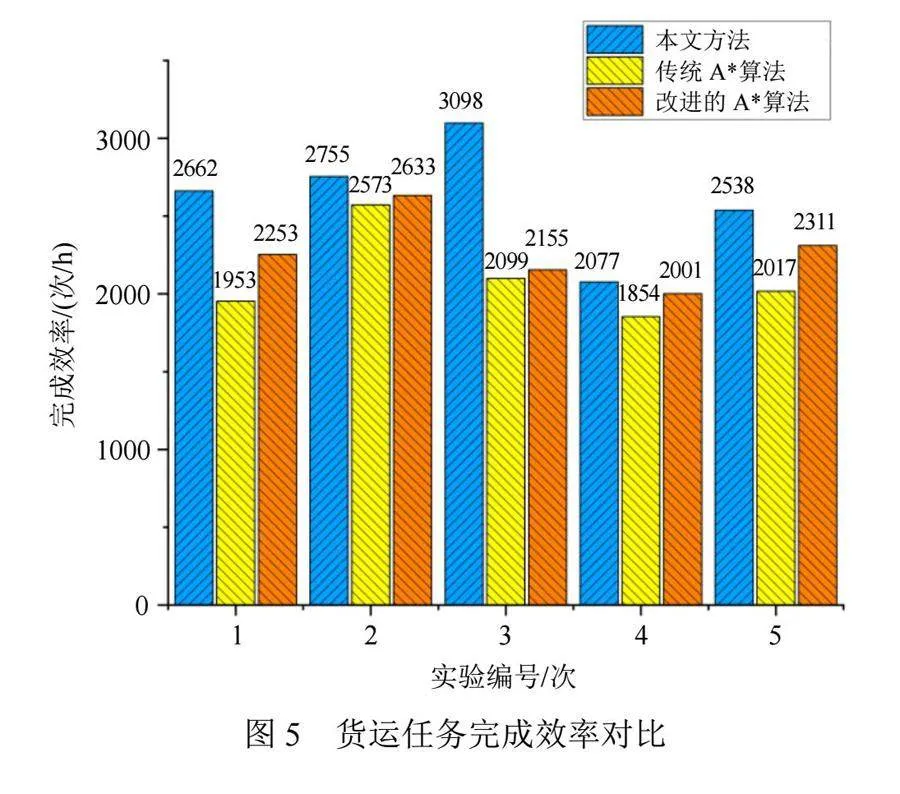
根据统计数据,重新设置动态随机网络的路径成本,并保留了起始点、终点以及多AGV路径网络中的AGV数量。采用传统A*算法、本文方法、改进的A*算法[25]进行对比实验。其中,改进的A*算法利用距离最优和转向平滑处理进行路径规划。数值模拟实验记录了多AGV系统在10 h内完成货运任务的效率,共进行了5组实验,实验结果如图5所示。
由图5可知,本文方法具有较高的任务完成效率,这是因为其根据路径网络资源的占用时间来迭代更新路径成本,将AGV调度到占用率较低的路径上,提高了多AGV系统在固定时间内的工作效率。
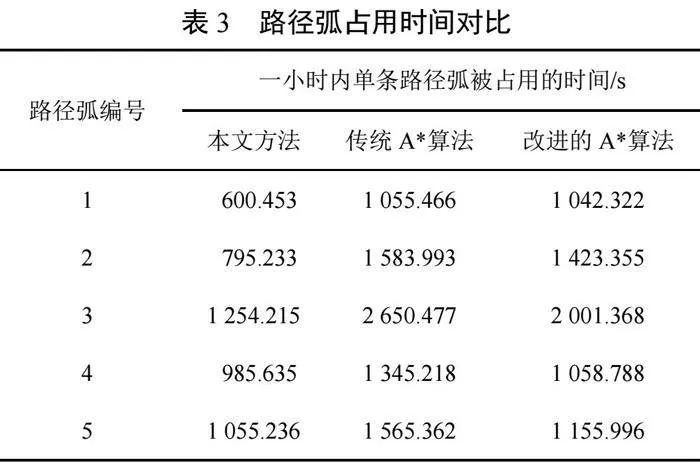
为了进一步验证路径网络资源的占用时间,本文在固定时间间隔内,选择部分路径弧的占用时间进行对比,结果如表3所示。
由表3可知,本文方法的路径弧占用时间较短,有效缓解了AGV拥堵的问题。
最后,分析多AGV系统的能耗。设置电机参数为 , , 。经过2 h的模拟,多AGV系统的能耗对比如图6所示。
由图6可知:在路径网络和AGV数量相同的情况下,本文方法的任务完成效率和节能效果均较优,即在固定时间内完成了更多任务,降低了系统能耗;本文方法的能效比(EER)比改进的A*算法高了26.84%,表明本文方法是可行且高效的。
4 结论
根据两轮差速驱动AGV的运动模型和多AGV系统的路径网络特点,本文提出一种基于启发式能耗优化的电力仓储分布式多AGV路径规划方法。数值模拟实验结果表明,与传统A*算法、改进的A*算法相比,本文方法实现了多AGV任务增效和节能目标。下一步研究将考虑每台AGV所受干扰抑制和额外能量损失参数调节的节能控制律。
©The author(s) 2024. This is an open access article under the CC BY-NC-ND 4.0 License (https://creativecommons.org/licenses/ by-nc-nd/4.0/)
参考文献
[1] 孙秋天,张笑然,王玄平,等.物流行业智能仓库自动配货出库研究[J].起重运输机械,2024(9):71-75.
[2] 司明,邬伯藩,胡灿,等.智能仓储交通信号与多AGV路径规划协同控制方法[J].计算机工程与应用,2024,60(11):290-297.
[3] 王亦晨,刘雪梅.基于冲突搜索增强深度强化学习的多AGV路径规划方法[J].机电工程技术,2024,53(8):23-27;88.
[4] 李晓东,童亮,陈梓宁,等.能耗优化的移动机器人路径规划方法[J].北京信息科技大学学报(自然科学版),2024,39(1):28-36.
[5] 张雨,王新,施嘉敏.基于低碳经济理论的电力物资仓库绿色化建设策略研究[J].企业改革与管理,2023(23):161-163.
[6] 杨静静,曹海平,丁杰,等.基于EdgeBoard的智能循迹避障小车设计[J].自动化与信息工程,2024,45(2):22-28.
[7] 田箫源,董秀成.基于改进DQN的移动机器人避障路径规划[J].中国惯性技术学报,2024,32(4):406-416.
[8] SHIN HYEOK-KI, KIM B K. Energy-efficient gait planning and control for biped robots utilizing vertical body motion and allowable ZMP region[J]. IEEE Transactions on Industrial Electronics, 2015,62(4):2277-2286.
[9] LIU S, SUN D. Minimizing energy consumption of wheeled mobile robots via optimal motion planning[J]. IEEE/ASME Transactions on Mechatronics, 2014,19(2):401-411.
[10] NISHI T, MAENO R. Petri net decomposition approach to optimization of route planning problems for AGV systems[J]. IEEE Transactions on Automation Science and Engineering, 2010,7(3):523-537.
[11] 杨洪玖,赵国威,李洪波,等.货架下方可通行无人仓中多自动导引车系统的路径规划[J].国防科技大学学报,2024, 46(4):104-113.
[12] NISHI T, TANAKA Y. Petri net decomposition approach for dispatching and conflict-free routing of bidirectional automated guided vehicle systems[J]. IEEE Transactions on Systems, Man, and Cybernetics, Part A, 2012,42(5):1230-1243.
[13] SONG R, LIU Y, BUCKNALL R. Smoothed A* algorithm for practical unmanned surface vehicle path planning[J]. Applied Ocean Research, 2019:839-20.
[14] FU B, CHEN L, ZHOU Y, et al. An improved A* algorithm for the industrial robot path planning with high success rate and short length[J]. Robotics and Autonomous Systems, 2018,106: 26-37.
[15] 王洪斌,刘德垚,郑维,等.异构多目标差分-动态窗口算法及其在移动机器人中的应用[J].控制与决策,2023,38(12): 3390-3398.
[16] KIM J H, KIM K B. Minimum-energy trajectory planning on a tangent for battery-powered three-wheeled omni-directional mobile robots[C]. IEEE International Conference on Robotics and Automation, Gyeonggi-do, Korea (South): IEEE, 2010: 1701-1706.
[17] MEI Y, LU Y, LEE C. Energy-efficient mobile robot exploration[C]. IEEE International Conference on Robotics and Automation, Orlando, FL, USA: IEEE, 2006: 505-511.
[18] DULEBA I, SASIADEK Z J. Nonholonomic motion planning based on Newton algorithm with energy optimization[J]. IEEE Transactions on Control Systems Technology, 2003,11(3): 355-363.
[19] 郭少晶,韩宝玲,罗庆生.六足仿生步行机器人系统节能技术的研究[J].机械与电子,2007(4):66-68.
[20] YANG J, QU Z, WANG J, et al. Comparison of optimal solutions to real-time path planning for a mobile vehicle[J]. IEEE Transactions on Systems Man and Cybernetics Systems, 2010,40(4):721-731.
[21] 刘靖,何俐萍,王有元,等.融合能耗指标与安全因子的移动医疗机器人通用路径规划[J].计算机集成制造系统,2023, 29(3):964-973.
[22] 郭文强,杜正毅.融合动态邻域搜索机制的蚁群系统算法[J].自动化与信息工程,2022,43(2):15-22.
[23] 梁嘉伟,刘向勇,张俊强.基于多级并行蚁群算法的综合布线路径规划[J].机电工程技术,2023,52(7):107-110;123.
[24] 盛骤,谢式千,潘承毅.概率论与数理统计[M].3版.北京:高等教育出版社,2001.
[25] 杨国,吴晓,肖如奇,等.改进A*算法的安全高效室内全局路径规划[J].电子测量与仪器学报,2024:1-13.
作者简介:
廉胤东,男,1992年生,博士研究生,工程师,主要研究方向:数字供应链、机器人调度、信息物理系统。E-mail: 601292628@qq.com
苟彬,男,1996年生,博士研究生,工程师,主要研究方向:设备缺陷检测与仿真模拟。E-mail: wjg5267871@qq.com
李超磊,男,1995年生,硕士研究生,主要研究方向:计算机视觉、人工智能。E-mail: 956901860@qq.com
李泽明,男,1997年生,硕士研究生,主要研究方向:供应链管理、区块链。E-mail: 931717079@qq.com
余锦伟,男,1995年生,博士研究生,工程师,主要研究方向:机器视觉、图像处理、人工智能。E-mail: yujw5@chinatelecom.cn
曾俊海,男,1996年生,博士研究生,主要研究方向:智能优化算法及机器人调度。E-mail: jhaizeng@163.com
