一种全自动石榴剥皮取肉装置的设计
2024-11-02冯浩洋孙亮波袁冲邓鸽




摘要:为解决传统人工石榴剥皮取肉效率低、取肉过程果肉易损伤等问题,对石榴果剥皮取肉方法进行研究,并基于SolidWorks软件设计了一种全自动石榴剥皮取肉装置。该装置通过对石榴果人工去皮方法进行功能元求解,设计有限流出料、摆正换位、切头划皮、撑开敲打以及分离收集五套工序步骤。为提高石榴果取肉加工效率,采用串并联式流水线设计将上述五套串联工序复制四组并联,对串联工位进行机械结构设计并验证其合理性。该装置将批量石榴分配给四组加工流水线同时加工,每个石榴需经过头部切除、表皮划瓣、撑开脱籽三道工序进行剥皮取肉处理,最后对石榴果皮果肉进行分离收集,完成石榴剥皮取肉的整个加工流程。该装置的设计为市场提供了一种大批量石榴快速剥皮取肉的可行方案。
关键词:石榴剥皮取肉;全自动装置;变胞机构;分离收集结构;SolidWorks
中图分类号:TP23 文献标志码:A doi:10.3969/j.issn.1006-0316.2024.10.008
文章编号:1006-0316 (2024) 10-0059-07
Design of an Automatic Device for Pomegranate Peeling and Fleshing
FENG Haoyang,SUN Liangbo,YUAN Chong,DENG Ge
( School of Mechanical Engineering, Wuhan Polytechnic University, Wuhan 430048, China )
Abstract:In order to solve the problems of low efficiency and potential damage of the flesh during traditional manual pomegranate peeling and flesh extraction, the method of peeling and extraction is investigated, and an automatic device based on SolidWorks 3D modeling software is designed. By solving the function element of the method of manual pomegranate peeling, the device is designed with five sets of process steps: limited outflow, positioning and switching, cutting and peeling, stretching and beating, and separating and collecting. In order to improve the efficiency of pomegranate flesh extraction, a serial-parallel conveyor line design is adopted to replicate the five sets of serial processes into four parallel groups, and the mechanical structure of the serial stations is designed and the feasibility is verified. The device distributes batches of pomegranates to four groups of processing lines simultaneously. The peeling and flesh extraction of each pomegranate includes three steps: head cutting, skin splitting and seed removal. Finally, the skin and flesh of the pomegranate are separated and collected to complete the whole process of peeling and fleshing. The design of the device provides a feasible solution for the quick peeling and fleshing of large quantities of pomegranates in the market.
Key words:pomegranate peeling and meat extraction;automatic device;metamorphic mechanism;separate collection structure;SolidWorks
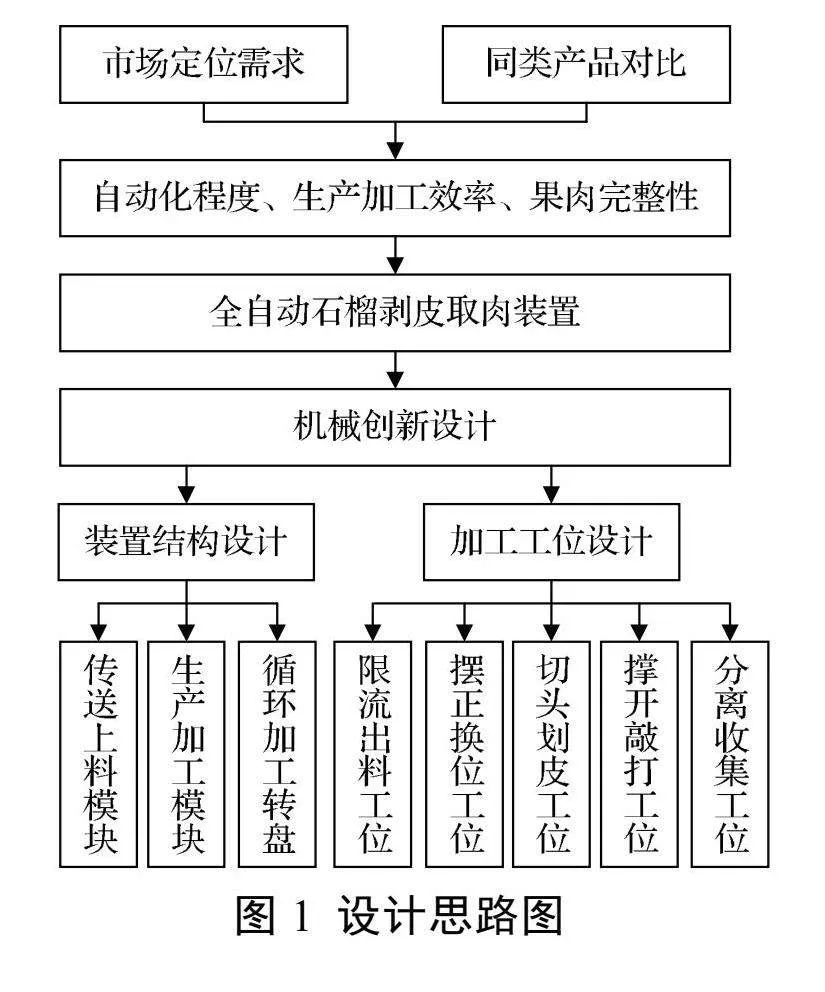
石榴作为一种口感风味极佳的水果,不仅果肉含有丰富的营养物质[1],果皮也具有较高的药用价值[2]。但石榴的剥皮取肉过程较为繁琐,人工脱粒效率低、成本高。目前市面上的几种石榴剥皮取肉设备相比于传统手工剥皮效率有所提升,脱粒效果显著,但存在难适应大批量加工、自动化程度不高、功能单一、取肉过程对果肉有损伤等问题。现有石榴剥皮取肉设备及性能分析如表1、图1所示。
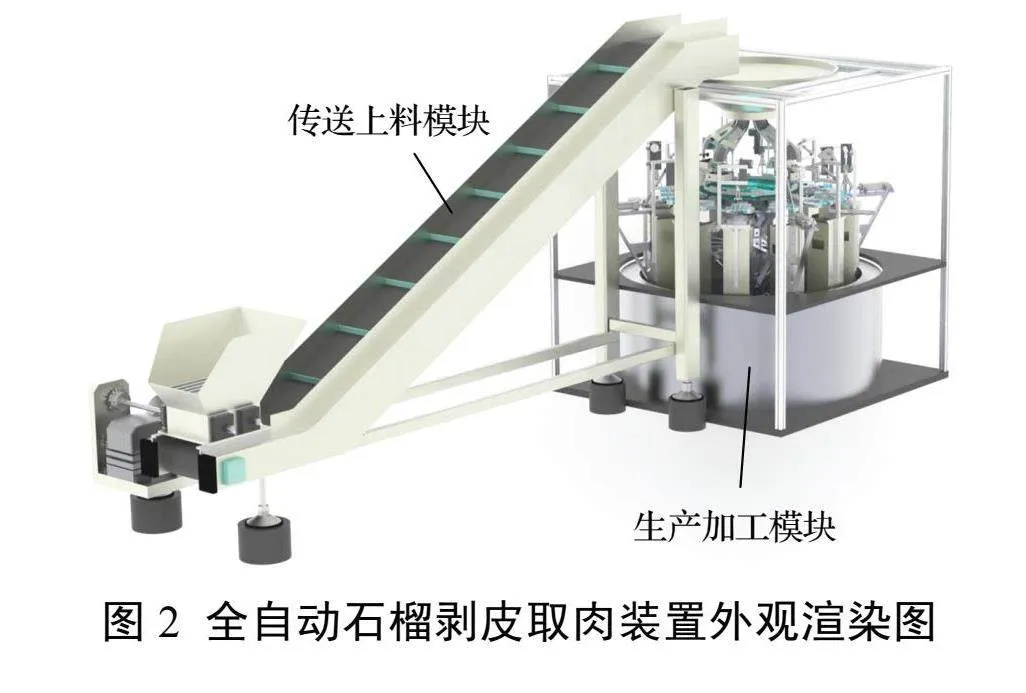
因此,本文设计了一种全自动石榴剥皮取肉装置,可对大批量石榴进行剥皮脱粒取肉,并对石榴果肉和石榴果皮进行分离收集。使用时只需将石榴批量倒入送料箱中,经过一系列自动化加工便可得到纯净的石榴果肉和果皮。
1 设计思路
该全自动石榴剥皮取肉装置在人工石榴剥皮取肉方法的基础上,通过研究石榴的形态结构,对石榴剥皮取肉的每一步处理进行动作原理分解,得出每个完整的石榴剥皮脱粒需要经过切头、划皮(开瓣)、掰开敲打三大步骤。针对这些步骤进行对应工位结构设计,并通过机械结构实现工位功能效果[6]。该装置以PLC控制器为核心和控制单元,形成一整套完整控制流程的控制功能机制[7],对每个工位的设备进行精准控制,使每个工位有序高效进行。整体设计思路如图1所示,完整装置如图2所示。
2 结构设计及功能实现
2.1 加工工位结构
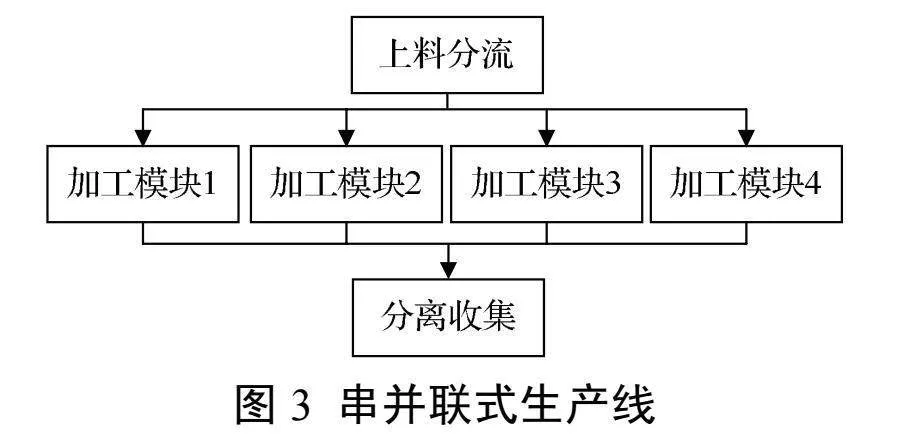
在对石榴剥皮取肉过程进行动作原理分解的基础上,为提高石榴加工的自动化水平和生产效率,本研究采用串并联式生产线设计[8],如图3所示。
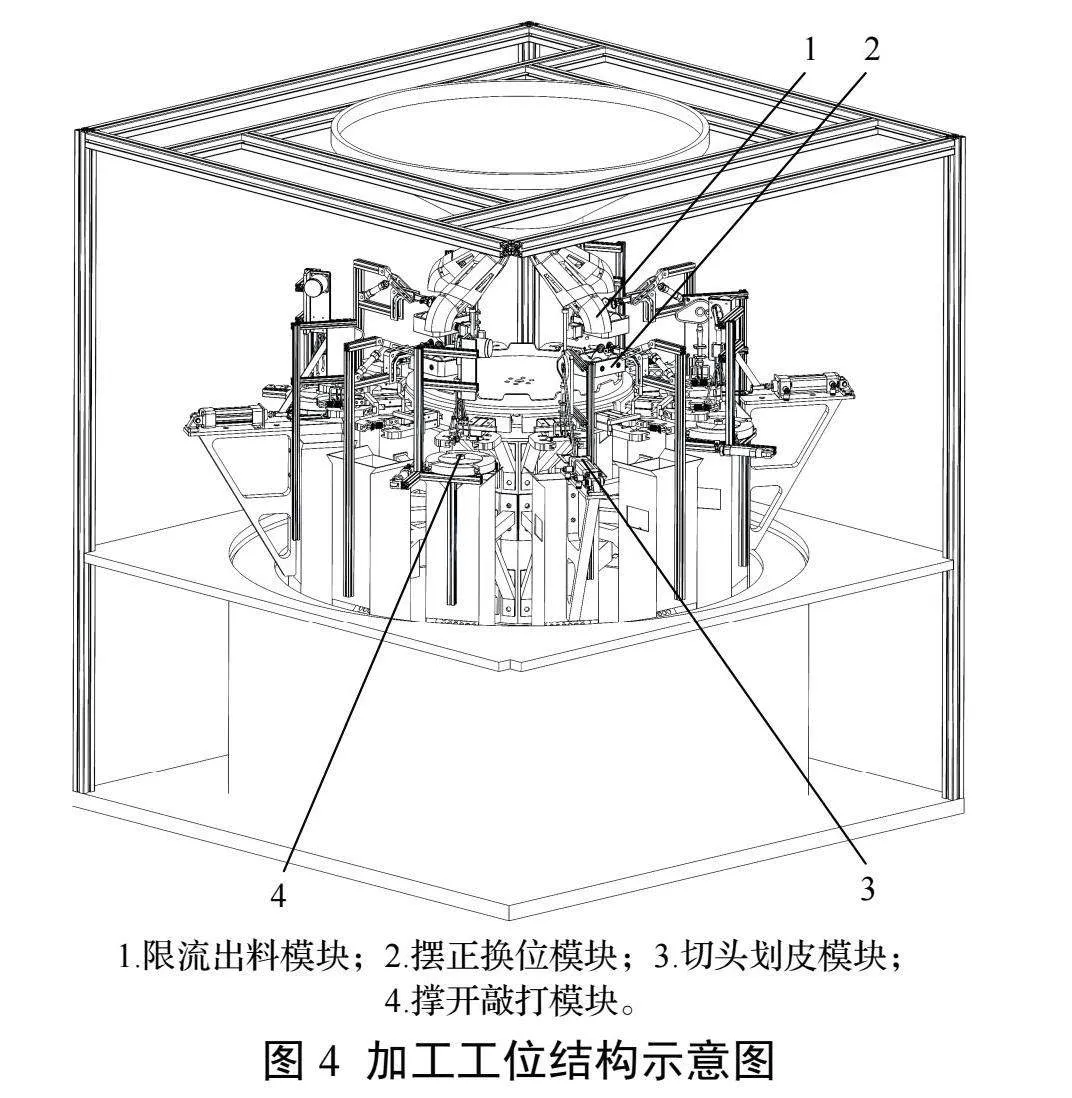
加工工位结构示意图如图4所示。加工区域的主体被构建为一个环形加工工位,其周围并联四组功能相同的加工模块。进行剥皮取肉工作时,每个石榴都必须依次经过限流出料、摆正换位、切头划皮、撑开敲打这四个工序流程。每组加工模块均包含上述四个工位,以确保每个石榴都能得到一致和高效的处理。
参考FMS(Flexible Manufacturing System,柔性制造系统)[9]和CIMS(Computer Integrated Manufacturing Systems,计算机集成制造系统)中常见的工作站概念,为实现工序的连续循环加工,本设计引入了转盘工位,不仅可以保证每个工位有序运作,而且可以最大化地提高整个系统的生产效率和灵活性[10]。
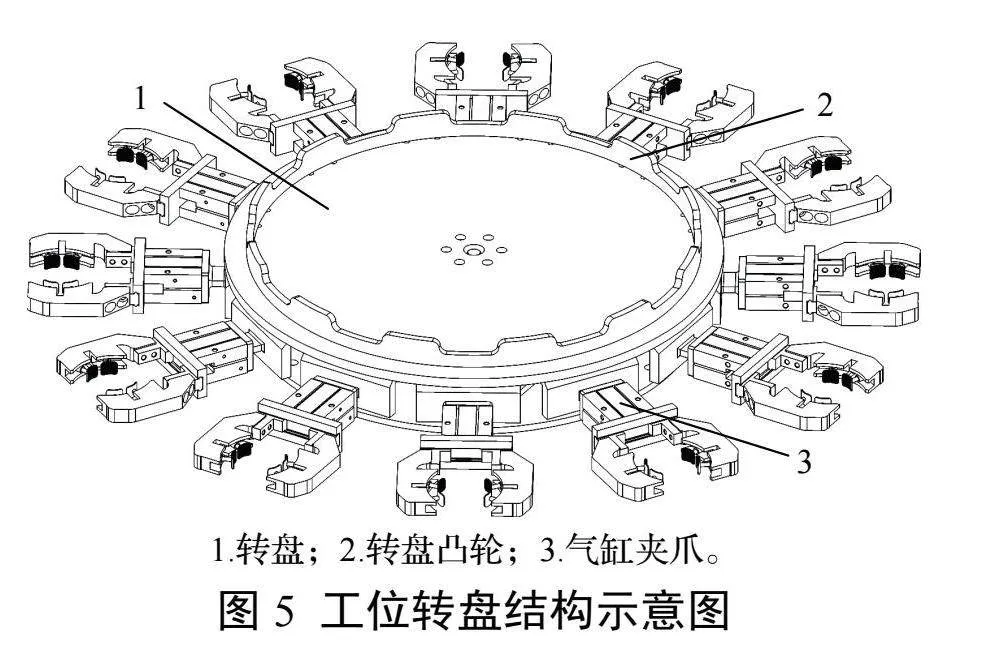
在设计本装置的工位转移机制时,采用一种内部棘轮工位转盘机构,如图5所示,旨在实现高效且精确的间歇性工位转移[11]。该机构的设计基于机械间歇运动理论,通过转盘的分度运动来确保每个工位之间的同步转移和石榴的连续加工。
当各工位正在加工时,转盘通过制动系统保持静止状态;完成加工后,转盘由制动状态切换至启动状态,主体转动30°对每个工位进行一次工位转移。转盘的外侧安装有12组气缸夹爪,分别对应十二个加工工位,对石榴进行加持固定。为确保加持过程中石榴不脱落,进行如下计算:
Fg=mg (1)
Fe=1.5Fg (2)
Ft=Fg+Fe (3)
式中:Fg为石榴所受重力;m为一个标准石榴的质量;Fe为机器运转过程中的额外夹持力;Ft为夹爪总夹持力。
取:m=0.5 kg,g=9.8 m/s2。
计算得:Ft≈14.7 N。
即每组夹爪的总夹持力至少为14.7 N。
2.2 限流出料机构
为确保石榴从上料箱到加工区域的自动化高效、有序输送,通过举升传送带将批量石榴运送至分流漏斗,使石榴被分配至四组模块。为实现石榴的有序分配,在分流漏斗内设置四组限流通道,确保同一时间每个工位只处理一个石榴。
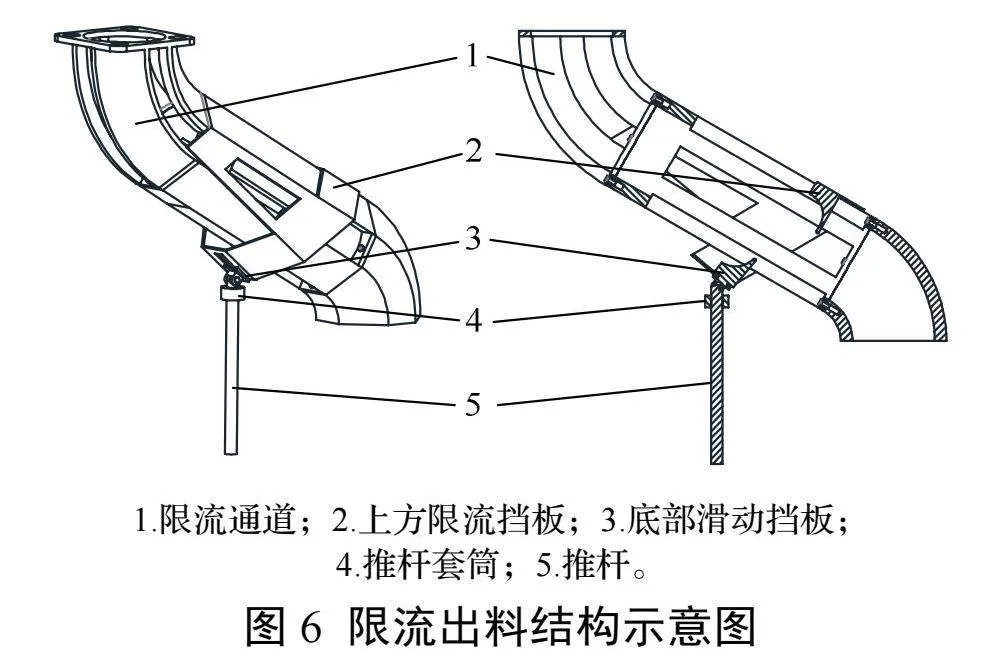
限流出料结构由限流通道、上方限流挡板及底部滑动挡板组成,如图6所示。进入限流通道内部的石榴沿管壁有序排列,初始状态为上方限流挡板放下,通道内所有石榴均被阻隔。出料时,下方推杆顶起,推动底部滑动挡板上升,继续阻碍上方石榴通过,同时在滑槽的辅助下顶起上方限流挡板,供下方石榴通过。
成熟石榴的直径约为8~13 cm,因此,上方限流挡板和底部滑动挡板的间距尺寸活动范围设计为14~16 cm,仅略大于单个石榴的最大直径,从而确保每次出料时只限一个石榴进入下方工位,实现有序出料。为进一步验证该限流出料结构的设计合理性,计算:
F=3n-(2Pl+Ph) (4)
式中:F为机构自由度;n为活动构件数;Pl为低副约束数;Ph为高副约束数。
该机构设计中,已知n=4,Pl=5,Ph=1。
计算得:F=1
原动件数目为1,该机构具有确定的运动,符合设计要求。
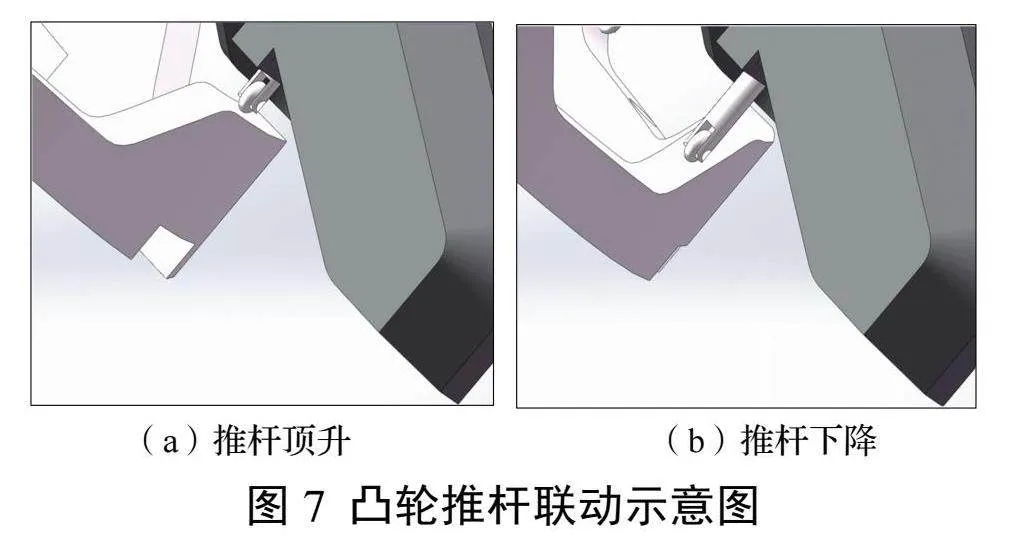
如图7所示,加工过程中,推杆与工位转盘边缘的凸轮结构采用联动设计,将周期性的线性推动力传递给推杆,从而实现对石榴限流出料的原动力提供。凸轮结构的旋转与工位转盘的运动相互耦合,确保在转盘进行工位转移的同时,推杆按照预定的时序顶起,推动限流挡板,完成石榴的有序出料,从而实现对石榴流动的精确控制,避免石榴的堆积和损伤。
2.3 摆正换位机构
为满足后续工序的自动化加工要求,石榴需统一姿态,实现顶端萼管向下标准化摆放,为此设计了一套摆正换位机构。
如图8所示,摆正机构包括摆正台和摆正托盘。石榴从出料口落下后,首先进入摆正台区域。在此阶段,电机启动并驱动两个凹形滚轮旋转,引导石榴进行有序滚动,利用石榴的球形几何特性,将石榴的萼管姿态有效限制在两种可能的滚动轴向上。
为使石榴姿态统一为萼管朝下,布置光感传感器[12]于工位转盘内侧,检测石榴萼管的朝向,再利用机器视觉系统[13]精确计算和识别石榴萼管的位置。当传感器成功检测到石榴萼管时,表明其已正确朝向工位转盘内侧,无需进一步调整。若传感器未能检测到萼管,则说明石榴朝向需调整,此时控制系统单元将接收到传感器的信号[14],并激活位于摆正台下方的气缸。在螺旋限位槽套筒的辅助下,气缸推动推杆完成180°的旋转。此过程中,推杆上方的托盘顶起石榴并使其脱离滚轮,旋转180°实现姿态调整,确保石榴的萼管朝向工位转盘内侧。
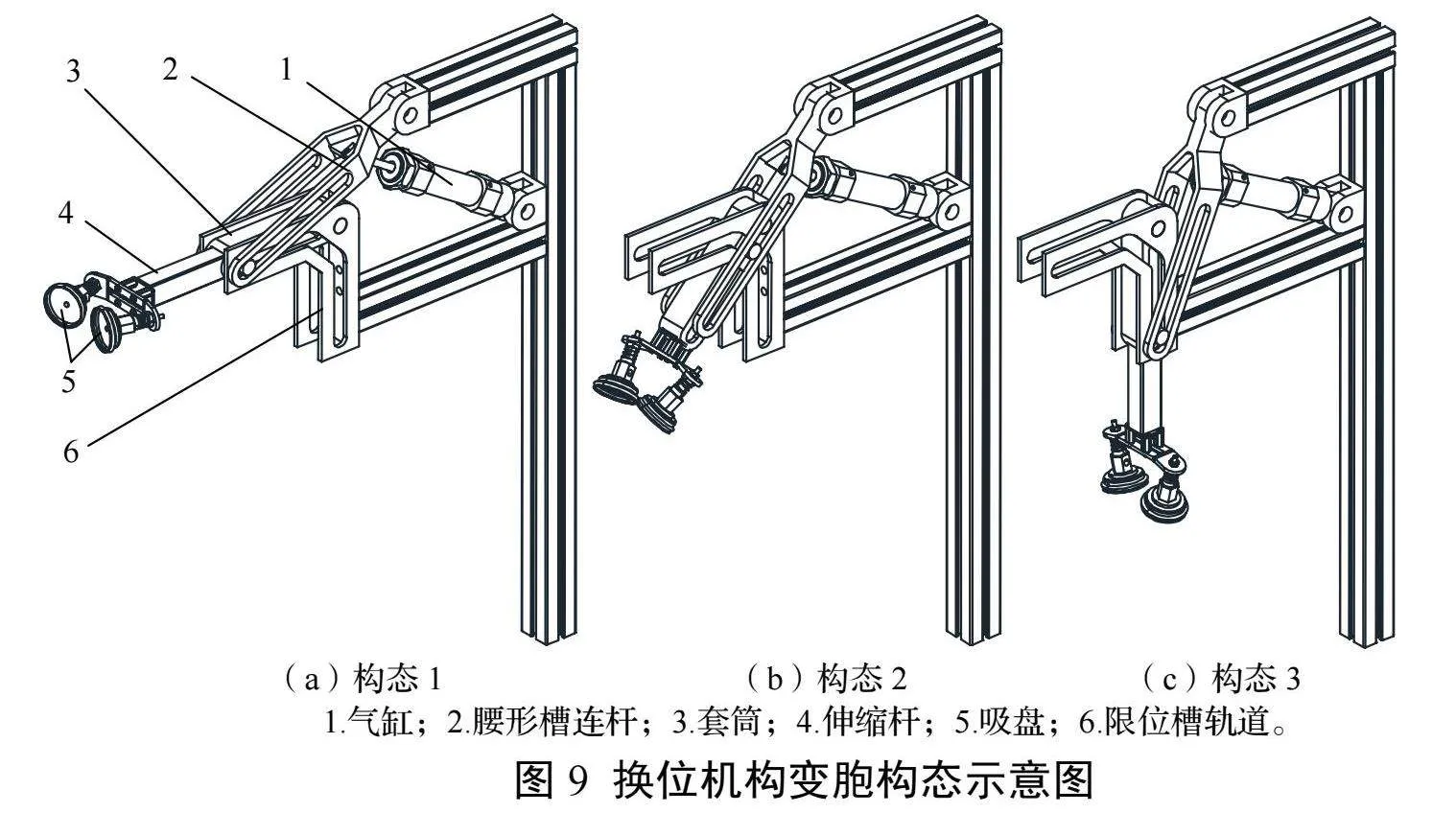
为将摆正后的石榴从摆正台转移至下方气缸夹爪位置,设计了一种变胞机构[15],如图9所示。该变胞机构包含气缸、腰形槽连杆、可旋转套筒、伸缩杆、吸盘以及限位槽轨道等关键组件,其工作过程分为三个构态,每个构态对应不同的动作效果[16]。
在构态1中,吸盘通过负压装置吸附石榴,气缸驱动腰形槽连杆,带动伸缩杆后移。此阶段,机构的动力分析侧重于确保吸盘稳定吸附石榴,并维持其姿态稳定,实现石榴的初始抓取并移出摆正台,为下一过程留出运作空间。
在构态2中,伸缩杆后移至底部卡死并锁定,此时旋转套筒与伸缩杆结合为一体,并共同绕固定转轴转动。在这一过程中,完成对石榴90°的转移动作。
在构态3中,机构整体转动90°后锁定转动,伸缩杆在腰形槽连杆的作用下向下推出,石榴被转移至加工转盘。
2.4 切头划皮机构
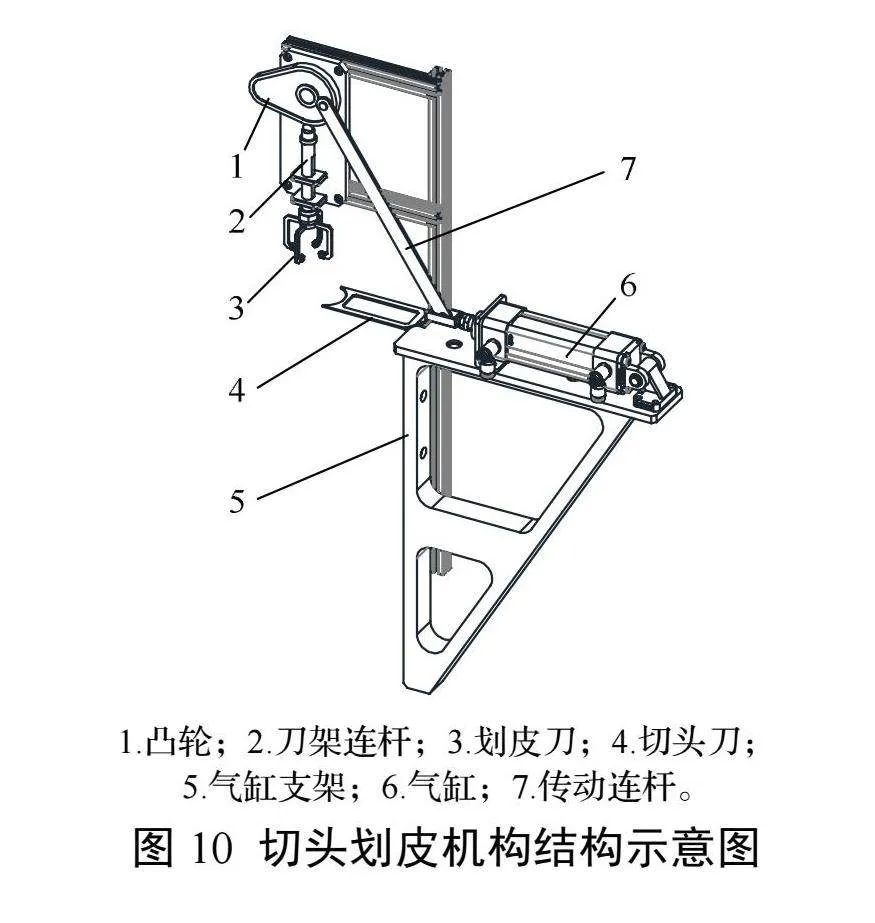
如图10所示,切头划皮机构的主要组成部分包括气缸、切头刀、传动连杆、凸轮、划皮刀架连杆以及划皮刀头。气缸的驱动作用带动切头刀对石榴头部进行切除作业,传动连杆与切头刀之间的铰链连接将动力传递给凸轮,推动凸轮逆时针转动,进而带动划皮刀架向下推出。划皮刀头上设计有四个刀片,刀片之间留有一定间隙,确保在将石榴表皮均匀划切为四瓣的同时,保留根部表皮的完整性。
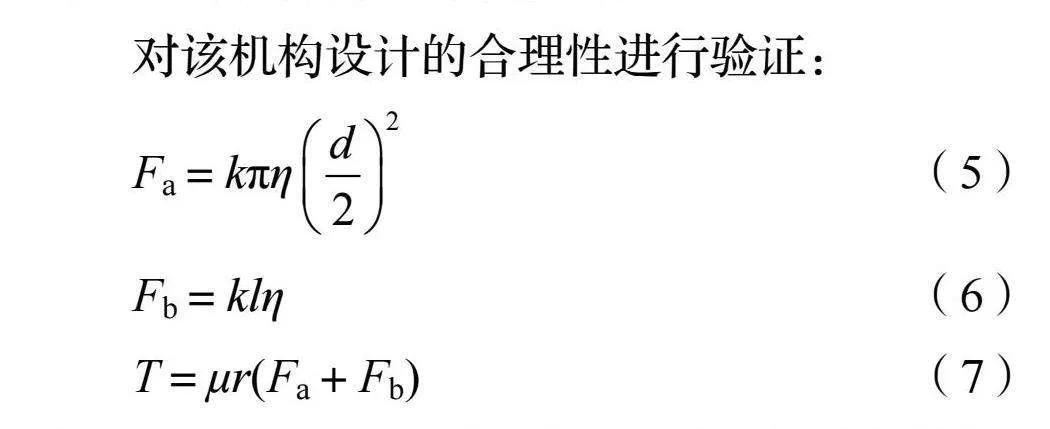
对该机构设计的合理性进行验证:
Fa=kπη (5)
Fb=klη (6)
T=μr(Fa+Fb) (7)
式中:Fa为切头刀所需力;k为石榴皮的抗切性系数;η为刀片的切割效率;d为头部萼管的直径;Fb为划皮刀片所需力;l为刀片划切总长度;T为传动凸轮所需扭矩;μ为所需力矩系数;r为凸轮的半径。
该设计中,k=5 N/mm2,η=0.9,d=5 cm,l=0.15 m,μ=0.1,r=0.05 m。
代入计算得到:Fa=9.82 N,Fb=6.75 N,T≈0.83 N·m。
将该结构设计的参数代入式(4),计算得其机构自由度为1。原动件数目为1,该机构具有确定的运动,符合设计要求。
2.5 撑开敲打机构
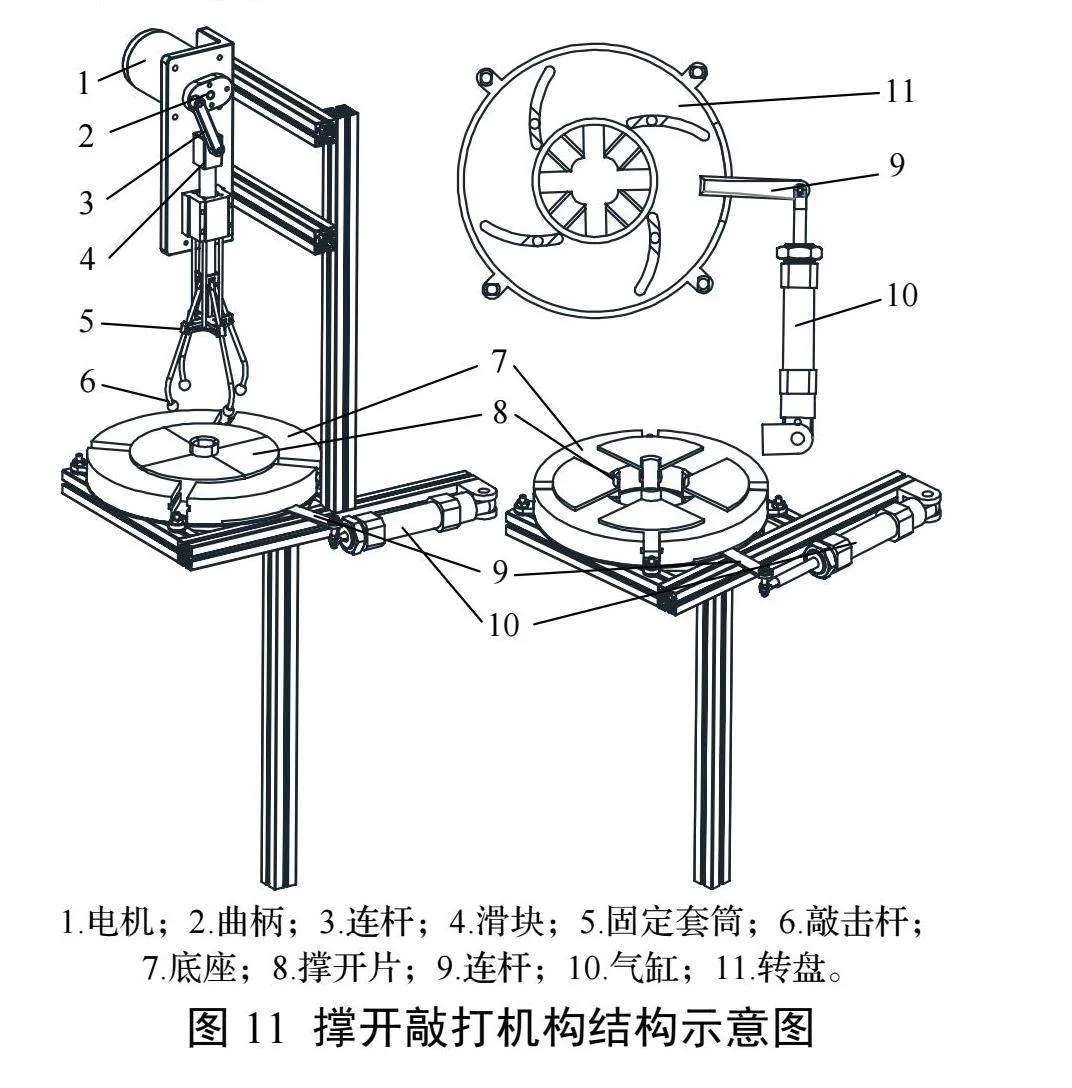
如图11所示,撑开敲打机构包括气缸、转盘、撑开片、敲击杆及配重小球等关键组件。气缸的推出作用通过连杆传递,驱动转盘逆时针旋转,撑开片在转盘弧形限位槽的引导下向外侧张开,同时底座上的直线型限位轨道槽使撑开片沿径向张开,实现对石榴的均匀撑开。敲打结构由电机驱动曲柄旋转[17],连杆带动滑块进行上下往复运动,敲击杆随之摆动,末端的配重小球在惯性作用下产生敲击力。敲击杆采用弹性材料,使得敲击更为高效,实现对撑开石榴表皮的精准脱粒。
为验证该机构设计的合理性,将设计参数代入式(4),得到其机构自由度为1。原动件数目为1,该机构具有确定的运动,符合设计要求。
2.6 分离收集装置
如图12所示,该装置由分离通道和收集箱两部分组成,其中分离通道内置分离隔板,隔板上设计有均匀排列的孔洞,孔洞尺寸精确控制为仅允许石榴果粒通过,确保果肉顺利落入下方的果肉收集箱。在石榴果粒完全脱落后,固定石榴的气缸夹爪松开,石榴皮因分离隔板的阻隔作用,沿隔板滑落至外侧的果皮收集槽。为防止大量果粒在脱粒过程中同时涌入收集通道,导致部分果粒与果皮混合,收集槽底部设计有滤网,确保落入槽内的果粒能够穿过滤网,最终汇聚于果肉收集箱。
该分离收集装置的设计充分考虑了石榴果皮果肉生物结构的分离特性,密排孔隔板设计优化了果粒与果皮的分离效率,减少了果粒的损失和果皮的污染。此外,收集箱和收集槽的两侧均开有出口通道,便于快速获取分离后的果肉和果皮。
3 结论
设计了一种全自动石榴剥皮取肉装置,集石榴上料、限流出料、摆正换位、切头划皮、撑开敲打以及分离收集功能于一体。其特点包括:①利用工位转盘结构联动整体加工,出料口限流依次出料,保证整个工序流程高效有序进行;②摆正结构对加工石榴的姿态进行调整统一,变胞换位机构三构态变换实现石榴从摆正台到气缸夹爪位置的工位转移;③实现了由一个气缸推动同时完成切除石榴头部萼管、划开石榴表皮两个动作;④撑开敲打机构实现对石榴的敲击脱粒,石榴果肉与果皮在分离收集装置中实现分离,可分别得到纯净的石榴果肉果皮。
该装置可对大批量石榴实现剥皮取肉、分离收集。采用PLC控制器为核心对整个机器设备进行全自动化控制,从上料到加工生产再到最后分离收集的全过程均由对应机械结构实现,加工过程自动化程度高,人工成本低,有效提高生产加工效率,且对果肉损伤较小,为市场提供了一种石榴剥皮取籽的可行方案。
参考文献:
[1]杨思佳. 石榴的营养功效与食用方法[J]. 新农村,2020(8):42.
[2]布日古德,娜布其. 简述石榴的药用及保健功效[J]. 中国民族医药杂志,2014,20(5):66-68.
[3]江门市新会区广记果园农业有限公司.一种石榴取籽装置:CN201811292993.9[P]. 2020-05-08.
[4]张雨婷.一种石榴剥皮脱粒机用筛选机构:CN202123254050.7[P]. 2022-09-13.
[5]安徽省成果石榴酒酿造有限公司.一种石榴去皮分离机:CN200810249695.1[P]. 2009-06-17.
[6]王敏. 自动化技术在农业机械设计制造领域的实践[J]. 南方农机,2024,55(6):59-61.
[7]赵晶晶. PLC在农业机械智能化调度与路径规划中的应用研究[J]. 南方农机,2024,55(6):90-92.
[8]王海南,郭琎,杨国亮. 自动包装设备一体化产线设计与研究[J]. 电子设计工程,2023,31(17):154-158.
[9]李焕,蒋婉莹,肖宇亮. 基于FMS柔性制造生产线仿真技术[J]. 数字技术与应用,2022,40(9):54-56.
[10]王全喜,张俊国,包德胜,等. 牧草种子加工线设计与试验[J]. 农业机械学报,2014,45(S1):113-118.
[11]芦俊,周芸,潘小华,等. 多工位转盘系统间歇性高速运动的瞬态动力学分析[J]. 现代制造工程,2021(4):6-11.
[12]高桥清,王善慈. 传感器技术的发展及研究动向[J]. 传感器技术,1985(1):2-14.
[13]张雷. 农业生产中机器视觉技术应用现状研究综述[J]. 农业经济,2023(1):36-37.
[14]刘细阳. 基于PLC控制的农产品加工机械性能检测系统的研究与设计[D]. 长沙:湖南大学,2006.
[15]戴建生,丁希仑,邹慧君. 变胞原理和变胞机构类型[J]. 机械工程学报,2005(6):7-12.
[16]杨鑫,孙亮波,熊鑫泉. 一种基于变胞机构的智能药箱的创新设计[J]. 机械,2023,50(1):9-13,41.
[17]刘劲松. 曲柄滑块机构教学装置的设计与制作[J]. 机械,2019,46(4):34-36,47.
[18]陈年钦,陈传辉,邹奇,等. 石榴籽粒制备机的研发[J]. 南方农机,2020,51(16):28-29.