输电铁塔高空作业安全防护装置的设计
2024-10-25李星涛李宗和张福永黄小虎王伟





摘 要:现阶段高压线路检修人员在攀爬高压电塔时存在安全隐患问题,在详细分析整个作业流程的基础上,针对无人机应用需求设计一种输电铁塔高空作业安全防护装置。创新设计安全防护装置的自动固定机构和释放机构,通过有限元方法分析自动固定机构支架的受力状况。利用ADAMS软件搭建虚拟样机,对整个安全防护装置的工作过程进行仿真验证。结果表明:该安全防护装置整体设计方案合理可行,为提高高空作业人员的安全防护提供了有效解决方案。
关键词:高空作业;安全防护装置;无人机技术;自动固定机构;虚拟样机仿真
中图分类号:TH136" 文献标志码:B" 文章编号:1671-5276(2024)05-0268-05
Design of Safety Protection Device for Overhead Operation of Transmission Tower
Abstract:To prevent the potential safety hazard of high-voltage line maintenance personnel climbing high-voltage tower and based on the detailed analysis of the whole operation process, a safety protection device for overhead operation of transmission tower is designed according to the application requirements of UAV. The automatic fixing mechanism and release mechanism of safety protection device are designed innovatively, and the stress state of the bracket of automatic fixing mechanism is analyzed by finite element method. ADAMS software is applied to build a virtual prototype, and the working process of the whole safety protection device is simulated and verified. The results show that the overall design scheme of the device is reasonable and feasible, which provides an effective solution to the improvemen of safety protection for aerial workers.
Keywords:aerial work;safety protection device;UAV technology;automatic fixing mechanism;virtual prototype simulation
0 引言
电能作为一种经济适用、易于传输和控制的清洁能源被广泛应用于动力、照明等各个领域[1-2]。近年来,随着我国在高压输电技术领域的大量投入和深入研究,使得我国在此领域处于世界领先水平。“西电东输”工程的建设,进一步推进了我国在电力建设方面的发展[3]。
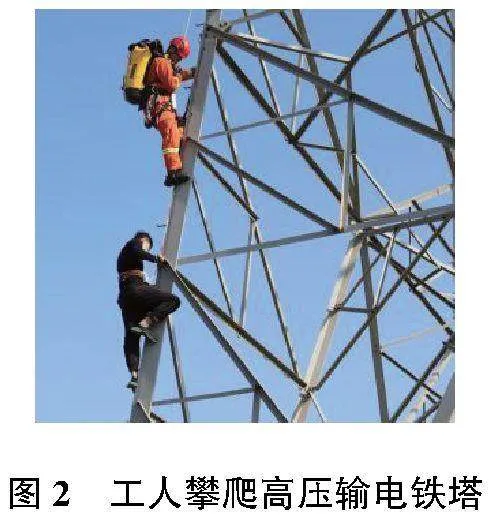
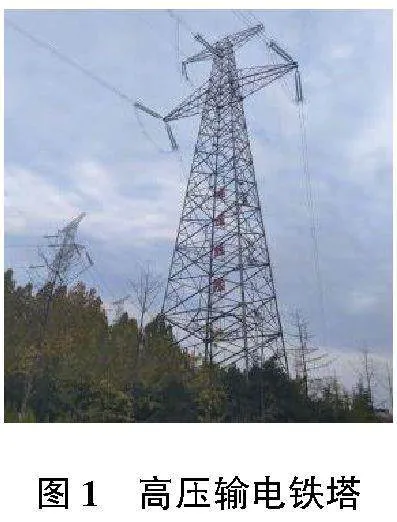
电力建设的高速发展,导致高压电塔的数量急剧增加,高空带电作业成为保障电力系统正常运行的重要环节。高压电塔为铁制框架结构,高度可达数十米,其结构如图1所示。现阶段,对电路的检修需要检修人员徒手攀爬至高压电塔顶端完成,过程如图2所示。在工人攀爬电力铁塔过程中会受环境温度、铁塔高度、人员身体状况等诸多因素影响,同时还需携带大量工具、工件等物品进行塔上作业,给作业人员带来较大负担。因此,亟需一种集安全防护、部署灵活、便捷高效等特点于一身的安全防护装置以解决上述问题。
1 问题分析及方案确定
1.1 问题分析
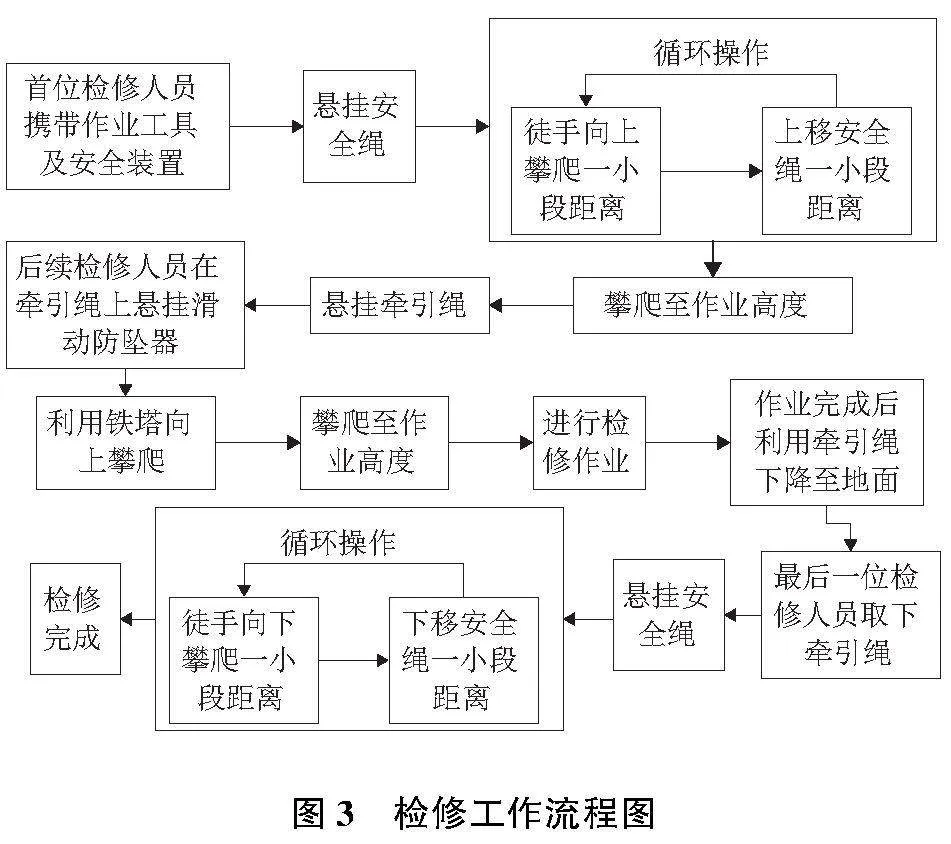
检修人员通过徒手攀爬至铁塔顶端的检修方式是现阶段的必要手段,短期内难以利用其他技术手段来有效替换。现有检修人员的工作流程如图3所示。首先需要首位检修人员携带作业工具和安全装置,在攀爬电塔之前利用塔身悬挂安全绳,由于人体手臂长度有限,安全绳悬挂点只能位于头部高度。因此,在向上攀爬过程中需频繁移动安全绳悬挂点,经过多次交替移动安全绳悬挂点逐步攀爬至作业高度。在塔身横梁处将牵引绳悬挂后,牵引绳下垂至地面,后续检修人员利用牵引绳悬挂滑动防坠器,攀爬铁塔至作业高度进行作业。完成检修作业后利用牵引绳下降至地面,最后一位检修人员取下牵引绳装置,再通过交替向下移动安全绳的方式逐步下降至地面。
分析整个检修过程,最大安全隐患主要集中在首位检修人员向上攀爬和最后一位检修人员向下攀爬的过程中。在此过程中为最大程度保护攀爬人员,需选择交替移动安全绳的方式实现。但此方式不仅会大量消耗检修人员的体力,而且此种悬挂安全绳的方式难以有效保护检修人员,并且在移动安全绳过程中也是极其危险的。其他检修人员在向上或向下攀爬过程中利用牵引绳和滑动防坠器代替安全绳的作用,可有效避免交替移动安全绳的问题,极大提高了检修人员的安全。
经过上述分析,在检修过程中如何减轻首位检修人员的体力消耗,提高其攀爬过程的安全性已成为解决此问题的首要目标。
1.2 方案确定
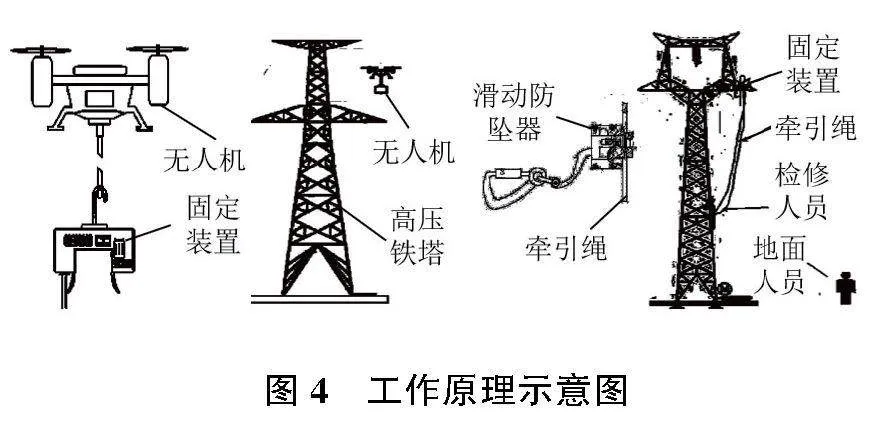
在整个作业过程中,若能提前将牵引绳悬挂完成,使得首位检修人员和后续人员一样,可利用牵引绳和滑动防坠器配合保证其攀爬过程的安全,则可有效解决上述问题。因此,本文利用无人机技术配合所设计的安全防护装置实现此过程,其工作过程如图4所示。
首先利用远程遥控技术操控无人机携带安全防护装置及牵引绳释放装置飞至铁塔适当高度。利用摄像头传输画面寻找合理固定点,当安全防护装置顺利落在铁塔横梁上之后,通过远程遥控系统控制固定机构进行导向、固定和锁紧。牵引绳释放装置将牵引绳放下后,作业人员利用滑动防坠器做好相关防护工作后进行攀爬。当塔上检修作业结束,工作人员安全返回地面后,通过遥控系统释放塔上固定机构,并由无人机携带安全防护装置返回地面。该方案通过无人机技术实现牵引绳的悬挂,能最大程度保护爬塔人员的安全,可有效提高作业人员的安全防护和爬塔效率。
2 安全防护装置的设计
2.1 整体设计
根据上述分析设计的整体结构如图5所示。整体结构主要由无人机和下端的安全防护装置组成。无人机选用四轴设计,通过十字形支架固定无刷电机, 利用无刷电机驱动4片桨叶旋转产生向上的推力。由于4个电机轴距几何中心的距离相等, 可保证对角2个轴产生的升力相同,使得力矩平衡, 确保四轴航向的稳定。四轴无人机具有可以垂直起降、空中悬停、结构简单、操作灵活等优点[4]。无人机下端的安全防护装置主要由自动释放机构、自动固定机构和牵引绳释放机构组成。在无人机下端固定失电型电磁铁作为自动释放机构。失电型电磁铁可在失电状态下产生强大的吸附力,而在通电状态下不产生吸附力[5]。仅仅通过控制电源的通、断即可实现无人机对安全防护装置的自动释放功能。安全防护装置在被无人机放置在横梁上后,可通过远程遥控固定机构实现导向固定和锁紧功能。固定机构固定完成后牵引绳释放机构释放牵引绳,检修人员利用牵引绳可安全高效地完成爬塔作业。
2.2 安全防护装置设计
常见高压电塔均采用镀锌角铁搭建而成,如何确保安全防护装置与镀锌角铁横梁可靠连接是保证牵引绳悬挂安全可靠的关键。本文设计的安全防护装置如图6所示。整体主要由牵引绳释放器、自动释放机构和自动固定机构组成。整个安全防护装置上方为失电型电磁铁,可通过控制通、断电路实现自动释放功能。固定机构由支架和上方设置的驱动电机、滑杆和丝杠组成,锁扣与滑杆和丝杠配合处分别设置有直线轴承和螺母。当安全防护装置放置在横梁上后,固定机构运行,通过电机驱动丝杠转动可带动锁扣沿滑杆移动,从而锁紧铁塔横梁,达到可靠固定的效果。采用具有自锁特性的丝杠螺母机构,可保证在驱动电机断电情况下锁扣不会自行移动,提高了其安全性。在支架下端设置有导向杆,便于无人机将安全防护装置放置在横梁之上。支架侧面固定有牵引绳释放器,可自主释放和回收牵引绳。整个安全防护装置可实现牵引绳的可靠悬挂,大大提高了作业效率和安全性。
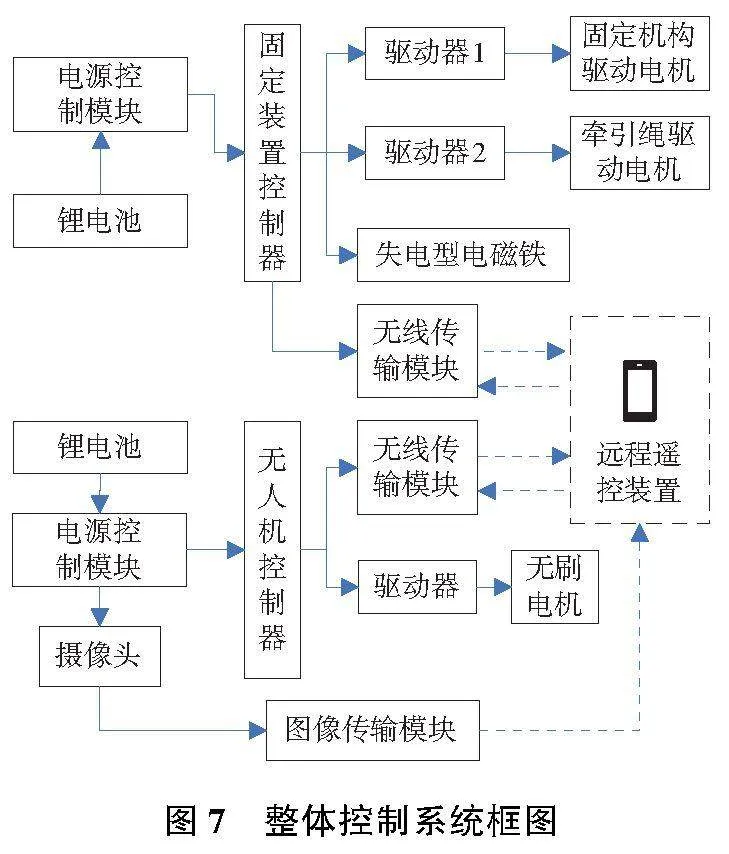
2.3 控制系统
整个控制系统框图如图7所示,包括无人机飞行控制系统和安全防护装置控制系统。无人机控制系统主要用于控制4个无刷电机转速,从而实现自身飞行状态的调整。无人机上安装的摄像头通过图像传输模块将实时画面传输至远程控制装置[6],便于操控人员对无人机飞行姿态的调整和安全防护装置的放置。安全防护装置控制系统用于控制自动固定机构的锁紧和牵引绳的释放。当无人机将安全防护装置运送至悬挂点附近后,利用实时回传的图像调整无人机姿态[7],将安全防护装置准确放置在高压铁塔横梁上后,发送锁紧信号,自动固定机构电机启动,通过丝杠螺母机构驱动锁扣锁紧。通过摄像头画面判断可靠锁紧后给失电型电磁铁供电,使安全防护装置与无人机脱离,操控无人机返回地面。发送信号控制启动牵引绳电机启动将牵引绳释放,完成整个牵引绳悬挂作业。
在检修人员完成作业全部返回地面后,发送信号使牵引绳释放电机启动收回牵引绳,操控无人机至安全防护装置附近,通过实时回传画面调整无人机接近安全防护装置,失电型电磁铁吸附在无人机下端支架后,遥控启动自动固定机构的驱动电机,使固定机构脱离横梁,由无人机携带安全防护装置返回地面。
3 分析与计算
3.1 自动固定机构支架的有限元分析
支架作为自动固定机构的关键部件,在人员发生跌落危险时起到主要受力作用,其设计的合理性和受力的安全性极其关键。因此对固定支架结构进行受力分析,以此验证固定支架的可靠性,为后续的进一步优化提供方向。
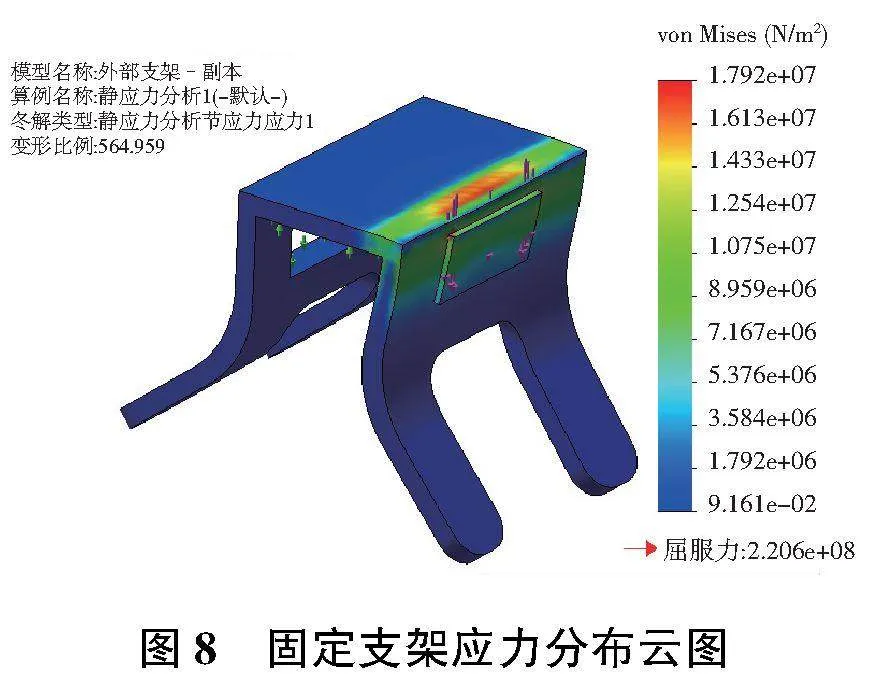
固定支架选取普通碳素结构钢(Q235),其弹性模量为2.1×1011N/m2,泊松比为0.3,抗拉强度为5×108N/m2,屈服强度为2.35×103N/m2。为确保安全,选取静载荷为实际工况的3倍。检修工人的身体质量设为80kg,g取10N/kg,则设定载荷为2 400N。在固定支架与锁扣和横梁接触处设置夹具为滚柱接触,可发生一定的相对滑动。利用高品质网格进行分析计算,得出的有限元应力分析云图如图8所示。
由图8可以看出,其应力最大点位于牵引绳悬挂一侧的折弯处,最大应力为1.8×103N/m2,小于屈服强度,整个固定支架安全可靠。但从安全角度分析,在牵引绳悬挂一侧的折弯处有较为明显的应力集中,可能会导致安全隐患,若后续要增加安全系数,则可在折弯处加厚,加工时注意过渡结构为圆弧,防止应力集中产生的危害。
3.2 失电型电磁铁的选型
自动释放机构作为无人机携带安全防护装置的关键部件,其吸附力大小需根据安全防护装置质量合理选型。利用建模软件设定各部件材料,分析其质量属性得出整个安全防护装置总质量为14.2kg。根据需携带质量选择失电型电磁铁型号为LS-P40/30S,该型号的各项参数如表1所示。
4 虚拟样机搭建仿真与实验
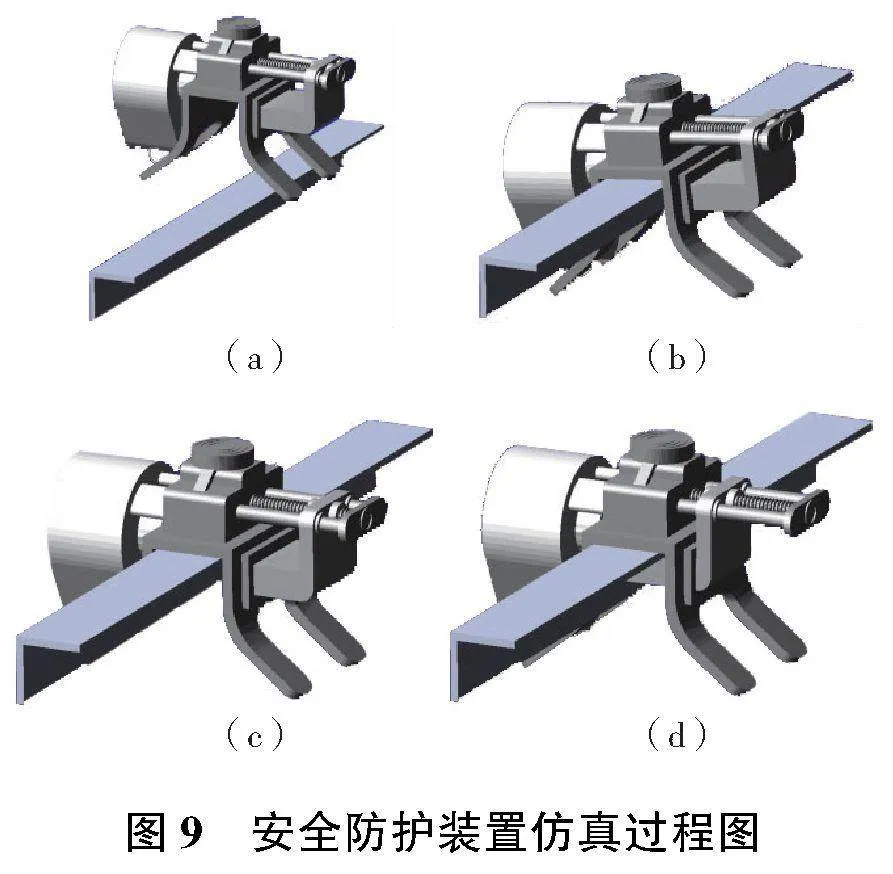
ADAMS作为现阶段常用的多体动力学分析软件,可对虚拟样机进行准确仿真,快速评估各种载荷和作用力对运动的影响[8]。安全防护装置在横梁上方的一定高度释放,可否稳定固定在横梁之上,与安全防护装置的结构设计和稳定性直接相关。因此使用虚拟样机对此过程进行仿真,便于后续进一步改进。使用SolidWorks完成建模后导入ADAMS中,根据实际工况设定相关参数,设定释放高度15cm,仿真时长6s,步长600步。整个仿真过程如图9所示。
设定横梁方向为z轴,竖直和水平方向为x轴和y轴,安全防护装置的不稳定摆动主要体现在x轴和y轴。因此,整个仿真过程应重点关注安全防护装置在下落至横梁上后x轴和y轴方向的摆动位移和速度。经过仿真,得到自动固定机构支架和锁扣在整个运行过程中x轴和y轴的位移与速度变化图,如图10和图11所示。从图中可以看出,在0.8s安全防护装置下落至横梁上,经过短暂的摆动后基本处于稳定,在3.5s锁扣工作后整个安全防护装置不再摆动。经过仿真表明,整个安全防护装置结构设计合理,工作运行稳定可靠。
5 结语
在充分分析和调研现有检修工人攀爬铁塔检修作业的现状和详细流程之后,明确了现有流程存在的主要安全隐患为牵引绳的悬挂。针对牵引绳的自主悬挂问题,结合无人机技术设计了一款输电铁塔高空作业安全防护装置。重点对安全防护装置的自动固定机构和释放机构进行了详细的结构设计,并对整体控制系统做了介绍。在考虑实际工况的情况下,对固定机构支架的可靠性进行了有限元分析,分析结果表明固定机构支架安全可靠,可承受3倍以上负载,并提出固定支架的优化方向。对释放机构的失电型电磁铁进行了选型,其负载大于安全防护装置质量,结构大小适中,选型合理。最后利用ADAMS软件搭建了安全防护装置的虚拟样机,并对其工作过程进行了仿真。结果表明:该安全防护装置设计合理,运行可靠,为提高检修人员的爬塔作业提供了可靠的安全防护,对进一步推动电力行业的发展具有积极意义。
参考文献:
[1] 杨博,陈义军,姚伟,等. 基于新一代人工智能技术的电力系统稳定评估与决策综述[J]. 电力系统自动化,2022,46(22):200-223.
[2] 沈玉玲,吕燕,陈瑞峰. 基于大数据技术的电力用户行为分析及应用现状[J]. 电气自动化,2016,38(3):50-52.
[3] 杨先明,袁欣悦. 西电东送的区域经济增长效应[J]. 财经科学,2022(5):77-89.
[4] 崔粲. 无人机航拍在铁路事故救援中应用思考[J]. 铁路通信信号工程技术,2016,13(1):48-51.
[5] 李华锋,赵康康. 多耦合失电型电磁制动器的设计[J]. 电子制作,2022,30(16):67-69,54.
[6] 葛男男,孙伟,曹界宇. 无人机实时图像传输系统设计[J]. 中国新通信,2021,23(2):61-62.
[7] 贾文涛,李春涛. 无人机航迹优化与跟踪技术研究[J]. 机械制造与自动化,2020,49(6):156-161.
[8] 李昀轩,魏雅君,倪博宇,等. 基于ANSYS与ADAMS的六轴机器人整机分析[J]. 机械设计,2020,37(12):13-17.
