新能源商用车再生制动控制策略设计研究
2024-10-08关长明段元成王健
摘 要:文章针对新能源商用车再生制动系统,研究了其控制策略的设计方法。先分析了再生制动系统节能贡献度、冲击度等评价指标及要求,介绍了再生制动系统的结构及控制原理,重点研究了前、后轮制动力分配策略、后轮机电制动协调分配控制策略等,最后通过仿真和试验验证了所提控制策略的有效性。
关键词:新能源商用车 再生制动 控制策略 节能 制动稳定性
0 引言
随着人们环保意识的提高和对能源消耗的关注,新能源汽车技术的快速发展,新能源商用车也得到了广泛应用。再生制动作为新能源汽车的重要技术之一,可以有效回收制动能量,提高车辆的续航里程,对再生制动系统的控制策略进行研究和优化,对于提高新能源商用车的性能和竞争力具有重要意义。
1 再生制动系统评价指标及要求
某款新能源厢式货车具有以下参数,车型尺寸为5995mm(长)×2145mm(宽)×2760mm(高),轴距为3300mm,整备质量2300kg,额定载质量1500kg,前/后轴荷分配为55%/45%,质心位置H=1600mm。悬架采用麦弗逊式独立悬架(前)和钢板弹簧非独立悬架(后),悬架刚度分别为前18000N/m,后12000N/m,悬架阻尼为前1500Ns/m,后1000Ns/m。轮胎规格为215/75R16。配备永磁同步电机,额定功率120kW,最大扭矩320Nm,效率95%。电池采用三元锂电池,容量60kWh,电压350V,能量密度160Wh/kg。其他参数包括风阻系数为0.35,滚动阻力系数为0.015,最大爬坡度为20%。
1.1 节能贡献度
再生制动系统的节能贡献度是指通过再生制动回收的能量占总制动能量的比例,其表达式为:
上式中,ηr再生制动系统的节能贡献度,Er再生制动回收的能量,Eb总制动能量。
再生制动系统的节能贡献度受多种因素影响,不同类型车辆的制动能量回收潜力不同,例如,城市公交车由于频繁起步和制动,具有较高的再生制动能量回收潜力。驾驶员的驾驶习惯会影响车辆的制动能量回收效率,急加速和急制动会导致更多的制动能量以热能形式消散。道路状况也会影响车辆的制动能量回收效率,在拥堵路况下,车辆的制动机会增加,从而提高再生制动能量回收效率。
1.2 冲击度
再生制动系统在工作时,会产生制动力矩突变,车辆出现冲击感。冲击度是指再生制动引起的车辆纵向加速度变化率。其表达式为:
上式中,j为冲击度,Δa为车辆纵向加速度变化量,Δt为车辆纵向加速度变化时间。再生制动系统的冲击度受多种因素影响,再生制动控制策略直接影响再生制动系统的制动力矩变化速率,进而影响冲击度,同时,车辆速度越高,再生制动引起的冲击度越大。道路状况也会影响车辆的冲击度,在光滑路面上,车辆更容易发生制动滑移,会使冲击度增加。
1.3 再生制动系统设计要求
再生制动系统的设计应满足车辆制动性能要求,同时整合线控制动技术,最大限度地回收制动能量,降低再生制动系统的冲击度,提高车辆乘坐舒适性,并确保系统具有良好的可靠性和耐久性,保证系统的正常运行。再生制动系统应能够满足制动距离、制动时间、制动稳定性等性能要求,同时能量回收效率应尽可能高,不低于20%,而冲击度则应尽可能低,不大于3m/s³。此外,再生制动系统还应具有良好的可靠性,故障率应低,并具备良好的耐久性,以满足车辆的使用寿命要求。在设计过程中,必须确保车辆的安全行驶,同时兼顾节能高效、提高车辆乘坐舒适性、降低故障率和系统成本,以提高系统的性价比。
2 再生制动系统结构及控制原理
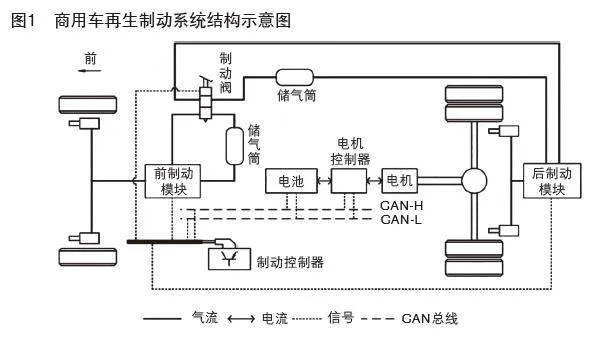
新能源商用车再生制动系统主要由以下部件组成,制动阀控制制动液的流向和压力,实现车辆制动,桥控模块接收来自制动控制器的信号,控制制动阀的开闭,制动器产生制动力,使车辆减速或停止。储气筒储存压缩空气,为制动系统提供压力源,制动控制器根据驾驶员的制动指令和车辆行驶状况,计算并输出制动力分配指令,电机控制器控制电机的运行,实现电机制动。电机将电能转化为机械能,在车辆制动时作为发电机使用,回收制动能量,电池用于储存再生制动回收的电能,驱动桥将电机的扭矩传递给车轮,驱动车辆行驶,制动器产生制动力,使车辆减速或停止,管路连接各部件,传递制动液和压缩空气,系统结构见图1所示。
当驾驶员踩下制动踏板时,制动控制器根据驾驶员的制动指令和车辆行驶状况,计算并输出制动力分配指令。制动控制器将指令发送给桥控模块,桥控模块控制制动阀的开闭,进而控制制动液的流向和压力,制动液推动制动器产生制动力,使车辆减速或停止。同时,电机控制器根据制动控制器的指令,控制电机的运行,电机在车辆制动时作为发电机使用,将制动能量转化为电能,并储存到电池中。再生制动系统根据制动能量回收的来源,可以分为以下两种工作模式,若采用纯机械制动,当制动能量较小或电机无法工作时,系统采用纯机械制动模式,由制动器产生全部制动力。机电混合制动时,当制动能量较大且电机能够工作时,系统采用机电混合制动模式,由电机和制动器共同产生制动力。根据车辆行驶状况和制动要求,分配前后轮的制动力,保证车辆制动稳定性,按照制动能量回收需求,控制电机的转速和扭矩,提高能量回收效率,协调电机制动和机械制动,保证车辆制动安全性和舒适性。
3 再生制动控制策略
3.1 前、后轮制动力分配
理想制动力分配是指在保证车辆制动稳定性的前提下,最大限度地提高再生制动能量回收效率的制动力分配方案。车辆制动时,前后轮的制动力分配应保持在合理的范围内,防止车辆出现侧滑或甩尾等现象,在满足制动稳定性的前提下,尽可能多地利用再生制动进行能量回收。理想制动力分配可以根据车辆的质心位置、轮胎参数等参数,计算出理想的前后轮制动力分配比例,采用基于滑移率控制的分配方法,通过控制前后轮的制动滑移率,实现理想的制动力分配。最大制动能量回收策略的制动力分配目标是最大限度地回收制动能量,前轮制动力分配系数为1,即前轮采用最大制动力分配,后轮制动力分配系数根据车辆制动稳定性要求进行调整,可采用简单控制策略,前轮采用最大制动力分配,后轮制动力分配系数固定为一个值,采用自适应控制策略,根据车辆行驶状况和制动要求,自适应调整后轮制动力分配系数。最大制动能量回收策略的制动力分配具能量回收效率高,控制策略简单的优点,但可能导致车辆制动稳定性下降。
3.2 后轮机电制动协调分配控制策略
电机制动是利用电机在车辆制动时作为发电机使用,将制动能量转化为电能并储存到电池中的过程。可采用转矩控制策略,根据制动能量回收需求,控制电机的转矩,也可通过滑移率控制策略,通过控制电机的转速,使后轮的制动滑移率保持在合理的范围内。电机制动方式能量回收效率高,制动过程平稳,乘坐舒适性好,但电机成本较高,需要配备电池等储能装置,适用于对能量回收效率要求较高的车辆,例如混合动力汽车、纯电动汽车。混合制动具有能量回收效率高,制动距离短,制动安全性高,但控制策略复杂,系统成本较高。采用协调分配控制策略,后轮机电制动协调分配控制策略是根据车辆行驶状况和制动要求,协调分配后轮的机械制动和电机制动,以提高车辆制动安全性和能量回收效率。
4 再生制动控制策略仿真验证
4.1 仿真模型搭建
为了研究新能源商用车再生制动系统的控制策略,本文基于AMESim软件建立了整车仿真模型,整车模型用于描述车辆的纵向和横向运动特性,驾驶员模型来模拟驾驶员的制动操作。电机模型用于对电机的电磁特性和转矩特性进行描述,减速器模型来描述减速器的传动比和效率,后桥模型体现后桥的传动特性,动力电池模型展现动力电池的充放电特性,整车控制器模型负责整车的控制和协调,再生制动控制模型用于再生制动系统的控制。整车模型采用AMESim提供的预定义模型,描述车身的质量、质心和转动惯量等参数,表示悬架的刚度和阻尼等参数,反映轮胎的纵向和横向力特性,采用比例积分控制器模拟驾驶员的制动操作,控制目标为车辆的减速度,采用永磁同步电机模型,描述电机的电磁特性和转矩特性,减速器模型反映减速器的传动比和效率,后桥模型反映后桥的传动特性。
4.2 循环工况仿真
采用AMESim软件按上节建立的仿真模型,对商用车瞬态循环工况进行仿真,评价能量回收效率、制动距离和制动稳定性。并联控制策略是一种简单的再生制动控制策略,车辆对原有制动系统改动较小,前、后制动力按固定比例分配,电机制动力与后轮制动力叠加。仿真结果表明,本文控制策略的能量回收效率比并联控制策略高约10%。这是因为本文控制策略能够根据车辆行驶状况和制动要求,优化制动力分配,提高电机制动的利用率。仿真结果表明,本文控制策略的制动距离与并联控制策略相近,这是因为两种控制策略都能够满足车辆的制动安全要求,制动稳定性比并联控制策略好,能够协调机械制动和电机制动,防止车辆出现侧滑或甩尾等现象,后轮机电制动协调分配控制策略能够有效提高新能源商用车的能量回收效率,同时保持良好的制动距离和制动稳定性。
4.3 不同制动强度工况仿真
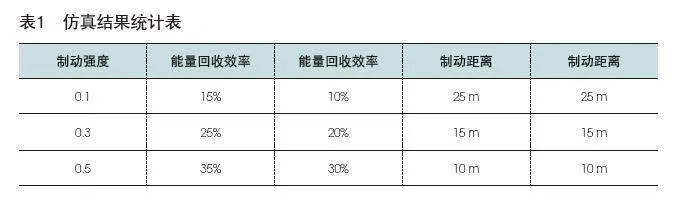
为了进一步验证本文提出的后轮机电制动协调分配控制策略的有效性对该控制策略在不同制动强度工况下的表现进行了仿真研究。采用AMESim,根据所建立的仿真模型进行仿真,初速度为60 km/h,制动强度分别为0.1、0.3、0.5,采用能量回收效率、制动距离、
制动稳定性等指标进行评价,具体数据见表1所示。
仿真结果表明,本文提出的后轮机电制动协调分配控制策略在不同制动强度工况下都能够有效提高新能源商用车的能量回收效率,车辆速度越高,制动冲击度越大。同时保持良好的制动距离和制动稳定性。
5 再生制动控制策略试验验证
5.1 转鼓试验验证
采用底盘测功机,匹配有本文控制策略的纯电动商务车,C-WTVC循环工况,试验指标为能量回收效率、制动距离、制动稳定性。试验结果表明能量回收效率比并联控制策略高约10%,控制策略能够根据车辆行驶状况和制动要求,优化制动力分配,提高电机制动的利用率。制动距离与并联控制策略相近,控制策略都能够满足车辆的制动安全要求。制动稳定性比并联控制策略好,能够协调机械制动和电机制动,防止车辆出现侧滑或甩尾等现象。转鼓试验结果表明,本文提出的后轮机电制动协调分配控制策略能够有效提高纯电动物流车的能量回收效率,同时保持良好的制动距离和制动稳定性。
5.2 道路试验验证
匹配具有此控制策略的纯电动商务车,采用封闭测试场地,初速度为60km/h,制动强度分别为0.1、0.3、0.5左右,测试能量回收效率、制动距离和制动稳定性。试验结果表明,本文控制策略的能量回收效率比并联控制策略高约10,能够根据车辆行驶状况和制动要求,优化制动力分配,提高电机制动的利用率。控制策略的制动距离与并联控制策略相近,两种控制策略都能够满足车辆的制动安全要求。采用的控制策略的制动稳定性比并联控制策略好,能够协调机械制动和电机制动,防止车辆出现侧滑或甩尾等现象。
6 结语
本文针对新能源商用车再生制动系统的控制策略进行了研究,提出了一种后轮机电制动协调分配控制策略,能够根据车辆行驶状况和制动要求,优化制动力分配,提高电机制动的利用率,进而提高车辆的能量回收效率。控制策略的能量回收效率比并联控制策略高约10%,制动距离和制动稳定性与并联控制策略相近,能够有效提高车辆的能量回收效率,在不同制动强度下,能量回收效率比并联控制策略高约10%,能够保持良好的制动距离和制动稳定性,在制动过程中,车辆能够保持稳定,没有出现侧滑或甩尾等现象。因此,本文提出的后轮机电制动协调分配控制策略是一种有效提高新能源商用车能量回收效率的控制策略,具有一定的应用价值。
参考文献:
[1]张利芬.考虑再生制动的线控电制动系统防滑控制策略研究[J].科技创新与应用,2023,13(30):26-29.
[2]杨昭,张荣,李天闯.某插电式混合动力客车再生制动控制策略研究[J].汽车实用技术,2023,48(18):15-19.
[3]韩聪,刘成晔.基于模糊控制的纯电汽车再生制动控制策略研究[J].机械工程师,2023(09):33-36+40.
[4]王俊阳,姚雪莲,杨艺,等.基于SDRE的电动汽车再生制动系统自适应容错控制设计[J].江苏理工学院学报,2023,29(04):9-18.
[5]马宁,郝亮,黄兴,等.分布式驱动电动汽车稳定性与再生制动协调控制[J].汽车实用技术,2023,48(14):86-91.
