基于语音控制的智能垃圾桶设计与实现
2024-09-30李慧莹曾凡欧黄宏泰吕一诺黄婧怡任相花
摘 要:该文基于STM32F103C8T6设计一款语音控制的智能垃圾桶系统,主要由数据处理模块、超声波测距模块、舵机驱动模块和语音识别模块构成。系统以单片机为核心,运用语音识别传感器采集声音信息,通过逻辑处理,单片机能够智能地下达指令,实现对垃圾桶盖子的差异化控制。通过实验操作,验证系统在语音识别、传感器准确度以及音量控制方面具有良好的性能。该设计系统结构简单、易于操作且性能稳定,为垃圾管理提供一种便捷的方式,使用户可以轻松进行垃圾分类和处理。此外,语音控制技术还减少用户需要触摸垃圾桶的机会,从而降低交叉感染的风险。
关键词:单片机;智能垃圾桶;语音识别模块;舵机驱动;方案设计
中图分类号:TN912.34 文献标志码:A 文章编号:2095-2945(2024)28-0135-04
Abstract: This paper designs a voice-controlled smart trash bin system based on STM32F103C8T6, which mainly consists of a data processing module, an ultrasonic ranging module, a steering gear driving module and a voice recognition module. The system takes a Microcontroller Unit (MCU) as the core and uses a voice recognition sensor to collect sound information. Through logical processing, the MCU can intelligently issue instructions to achieve differentiated control of the lid of the trash can. Experimental operations verify that the system has good performance in voice recognition, sensor accuracy and volume control. The design system has a simple structure, easy to operate and stable performance, providing a convenient way for garbage management, allowing users to easily classify and process garbage. In addition, the voice control technology also reduces the chance that users need to touch the trash can, thereby reducing the risk of cross-infection.
Keywords: MCU; smart trash bin; voice recognition module; steering gear driver; conceptual design
随着全球城市人口的不断增加,垃圾产生量也在迅速上升。而传统的垃圾处理方式已经难以应对日益增长的需求,因此垃圾管理已经成为一个亟待解决的问题。为了减少垃圾对环境的污染和资源的浪费,垃圾分类和回收已成为国际社会的共识。为顺应这一趋势,垃圾桶生产厂家的产品朝着“多样化”与“智能化”的方向发展。垃圾桶控制系统种类不断增加,功能也更加丰富,因此智能化垃圾桶也有望成为消费者的消费首选。
对于智能垃圾桶的相关研究,国外在2006年开始实施废电池和废玻璃等物品的回收利用,2007年开始尝试在垃圾桶上使用射频技术,20SVV4dyF+IcAyyLTOZSU1Xg==14年开始研究智能回收算法,2016年开始深入研究单片机与物联网。相较之下,我国在2000年时开始研究垃圾桶智能化系统,2009年初步研究全自动智能垃圾分类机,2015年开始探索智能分类垃圾箱,国外学者在解决这些问题时,也尝试通过行为来改变垃圾投放者的意识[1-2]。
国内在单片机发展方面,周慧珺等[3]提出采用红外探测和无线接收的方式,实现垃圾桶的自动开合。在智能垃圾桶设计方面,何侃等[4]采用了一种可语音识别的算法,然而验证结果显示其成功率较低,仍需进一步改进。傅晓芸借鉴了国外公共垃圾桶的设计方法,结合产品语义层级、投放引导语义以及参与操作语义3个方面的研究,为垃圾桶的发展提供新的设计思路。
1 系统整体方案设计
本研究在于设计一款基于语音识别的智能垃圾桶系统,帮助用户轻松辨识垃圾类别,并自动打开相应的垃圾桶盖。当垃圾桶即将装满时,系统自动发出报警提示,提醒用户处理。使用语音识别模块接收用户识别指令,实现对各类垃圾的辨识,主动播报对应的回收类型,并根据垃圾种类的识别结果自动打开相应的垃圾桶盖。用户也可通过按键开关手动操作,实现对垃圾的智能分类。此外,垃圾桶还能自动监测桶内的状况,当垃圾桶即将装满时,系统通过语音报警提示用户,并向管理员发送信息,使管理员了解垃圾桶的实时状况,从而及时进行清理。这一设计旨在减少垃圾桶爆满的情况发生,避免垃圾外溢,有助于美化环境,更好地促进垃圾分类。
本文的研究主要针对不同种类的垃圾,语音命令识别垃圾,播报提示垃圾所对应的回收类型并打开对应的垃圾桶,也可通过按键打开垃圾桶。通过红外传感器来监测垃圾桶是否填满,未满显示为绿灯,否则显示红灯。在垃圾装满后,通过蓝牙与扬声器来提示用户进行清理。主要研究内容如下。
1)分析用单片机来控制传统的舵机的原理,对传统的控制系统进行学习,实现对舵机的控制。
2)通过分析识别声音的原理建立对应训练模型,研究语音控制模块对声音的识别。
3)根据语音命令不同,自动控制打开对应的垃圾桶盖。
4)分析使用单片机如何应用红外传感器,达成自动监测以及预警的预期功能。
5)研究扬声器的控制与使用,实现语音播报以及异常状态提示等信息。
6)对于供电设备的安装与设计。
7)对于垃圾桶承载状态的正确运转状态显示与异常状态的提示。
1.1 控制系统设计
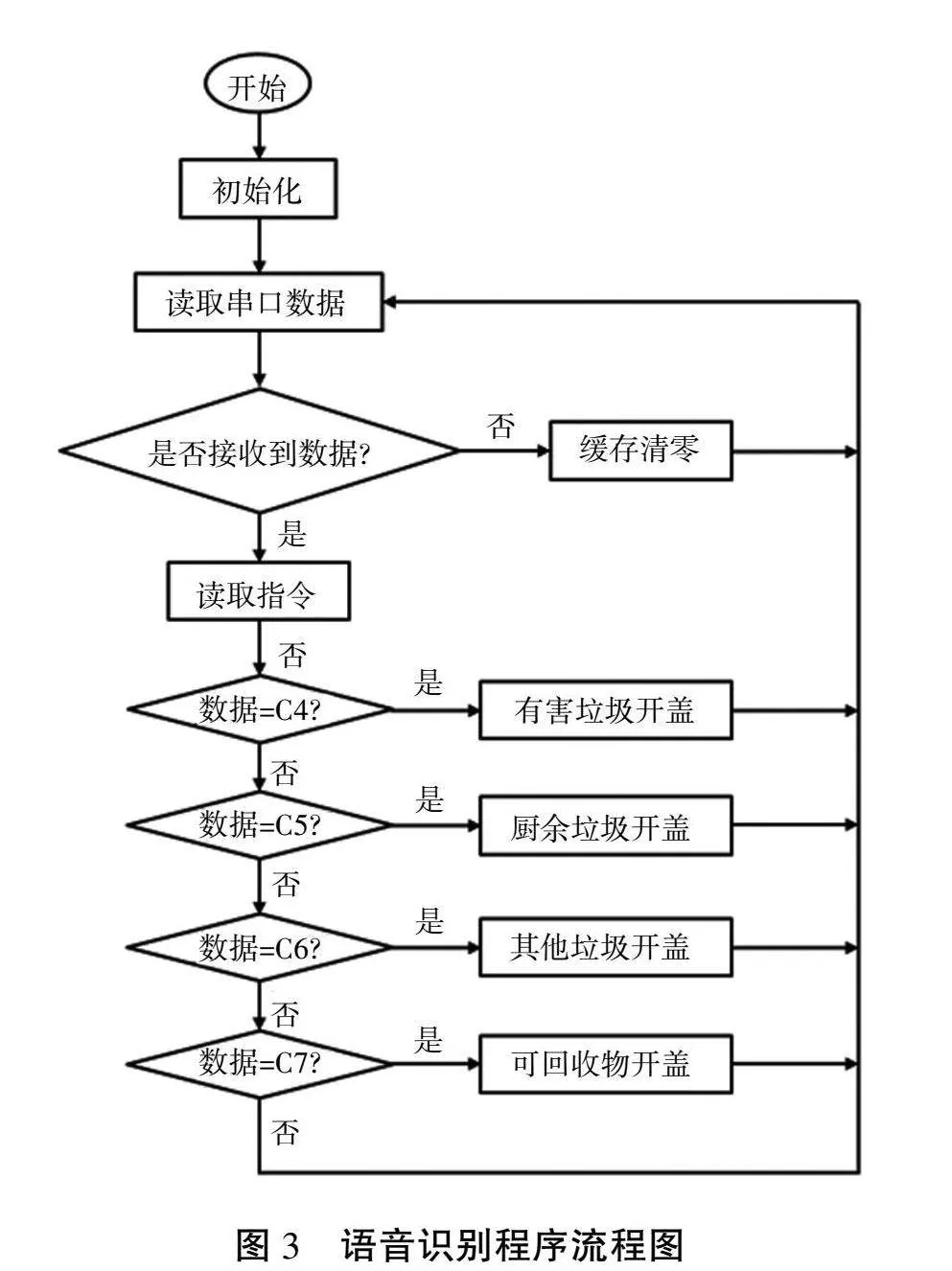
基于语音控制的智能垃圾桶系统需要实现的主要功能有语音命令识别、语音播报、垃圾桶自动开关盖和状态指示等,目的是为用户提供便捷的垃圾投放体验,并初步隔离垃圾,防止细菌的滋生。该系统的核心元件为STM32F103C8T6单片机,整体框图如图1所示。
1.2 系统硬件设计
1.2.1 数据处理模块
数据处理模块采用了STM32F103C8T6,通过超声距离模组及声音辨识模组生成资料,STM32启动超音波距离模组,使其在100 ms内完成行程。当输入端口收到来自超声波的高电平信号时,判定并算出垃圾箱与前面的障碍物之间的距离。当5个距离的平均值都低于规定的数值时,由STM32进行语音辨识,由STM32进行采集,并以总定时器设定的脉冲宽度为输入,实现对舵机的旋转,打开垃圾箱。大约10 s后,重新启动转向器,关闭桶盖。
1.2.2 超声波测距模块
该设备采用HC-SR04芯片,共有4根管脚:引脚1为5 V供电,引脚2用于接收MCU所发的启动信号,引脚3则向STM32输出对应的高电平,引脚4则与地面相连。当设备工作时, Trig将单片机发出的一个10 ms长的高电平信号作为启动信号,将超声发射出去。然后,记录从传送到接收所花费的时间,使Echo的等级从低到高,并且根据测量到的距离保持对应的一段对应的时间,当结束时,将该信号降到低水平,执行下一个测量[5-6]。
1.2.3 舵机驱动模块
舵机是一种位置伺服驱动器,通过控制系统实现精确的角度控制[7]。本文设计采用了SG90舵机,利用支撑臂和齿轮的传动装置,将垃圾箱罩与转向器相连,实现90°旋转。在从单片机那里收到20 ms的循环信号和0.5 ms(占空比2.5%)高电平的情况下,舵机转动到0°,这时桶帽是卧式的,完成了垃圾箱的关闭。在从微控制器收到20 ms的周期信号和1.5 ms(占空比7.5%)高电平的情况下,驱动筒盖旋转90°,完成打开。
1.2.4 语音识别模块
本装置使用了HLV-V20语音识别模块,该模块被广泛应用于各种智能设备上,价格亲民且识别率较高。利用SPI通信协议将所辨识的讯号进行初步的处理,并将其通过串行通信方式传送到MCU,以便对相应的垃圾箱进行控制;并与扬声器相连以提供语音帮助。本模块的语音识别语句可随时进行录入与删改,并且语句标识与国家对垃圾分类变化的新标准相适应,使装置的使用寿命得到提升。同时,考虑到垃圾桶的摆放环境有较多干扰信息,容易造成识别错误,所以为了增加识别准确性,在语音系统中附加了一级口令保护[8-9]。
2 系统软件设计
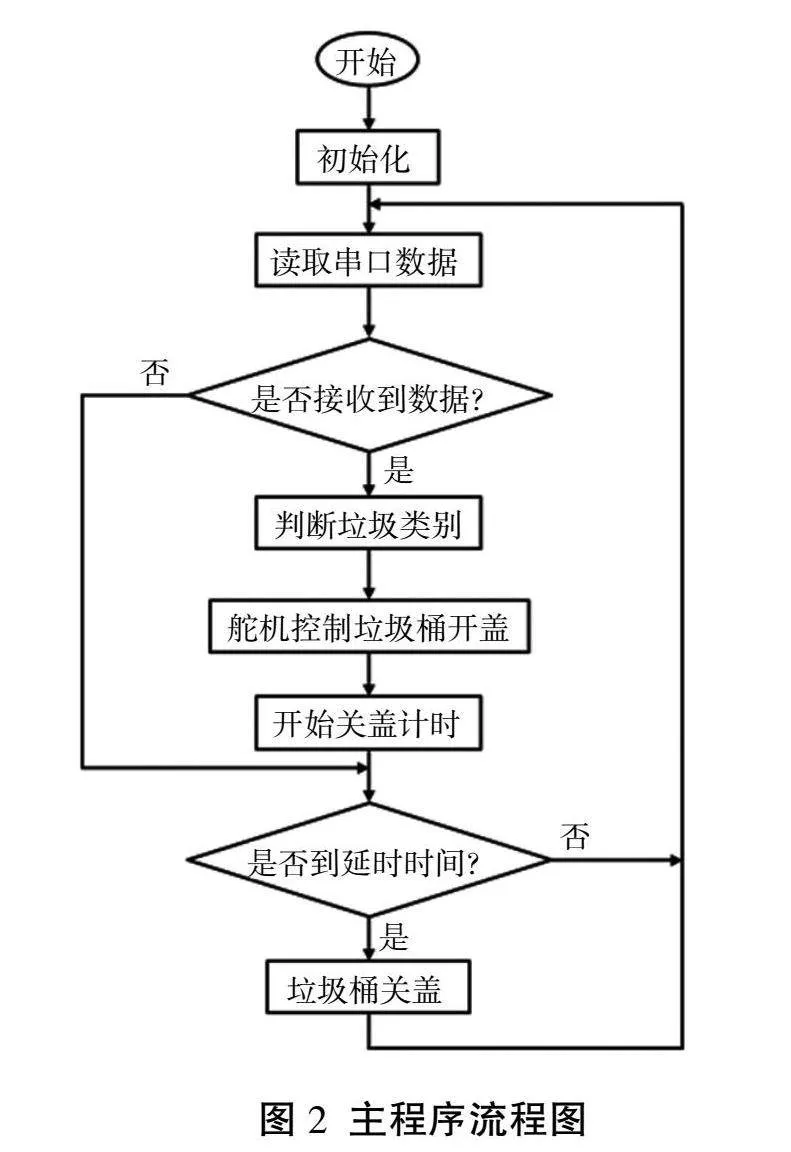
本系统软件设计采用了模块化结构,包括语音识别模块与提示模块、开关控制模块以及报警提示模块。程序由主程序和子程序组成,主程序的主要功能是通过单片机对输出电路进行控制,以达到智能分类的效果,其流程图如图2所示。子程序主要包括舵机子程序设计和语音识别子程序设计。
2.1 舵机子程序设计
舵机的控制信号为PWM信号,通过占空比来改变舵机的位置。为了不影响中断程序的运行,并且确保软件在定时中断期间采集其他的信号,信号采集函数被放置在较长的定时中断中执行。
智能垃圾桶在开盖时需要将舵机旋转到0°,因此将输出占空比设置为1.5 ms的控制脉冲,关盖时将舵机旋转到-90°,输出占空比为0.5 ms的控制脉冲。要使舵机转动到左侧最边缘,需要设定2 ms的正脉冲,18 ms的负脉冲。在起始条件下,该控制端口发出高电平信号,设定计时器在2 ms之后出现一个中断,在该中断出现之后把控制器的接口设置成了一个较小的电平,并把其中断时间设置成18 ms。在经过18 ms之后,切换到新的时序中断,把控制端口设置成高电平,把计时器的初值设置成2 ms,然后等待下一次的中断,通过循环,实现PWM信号到舵机的输出过程。
2.2 语音识别子程序设计
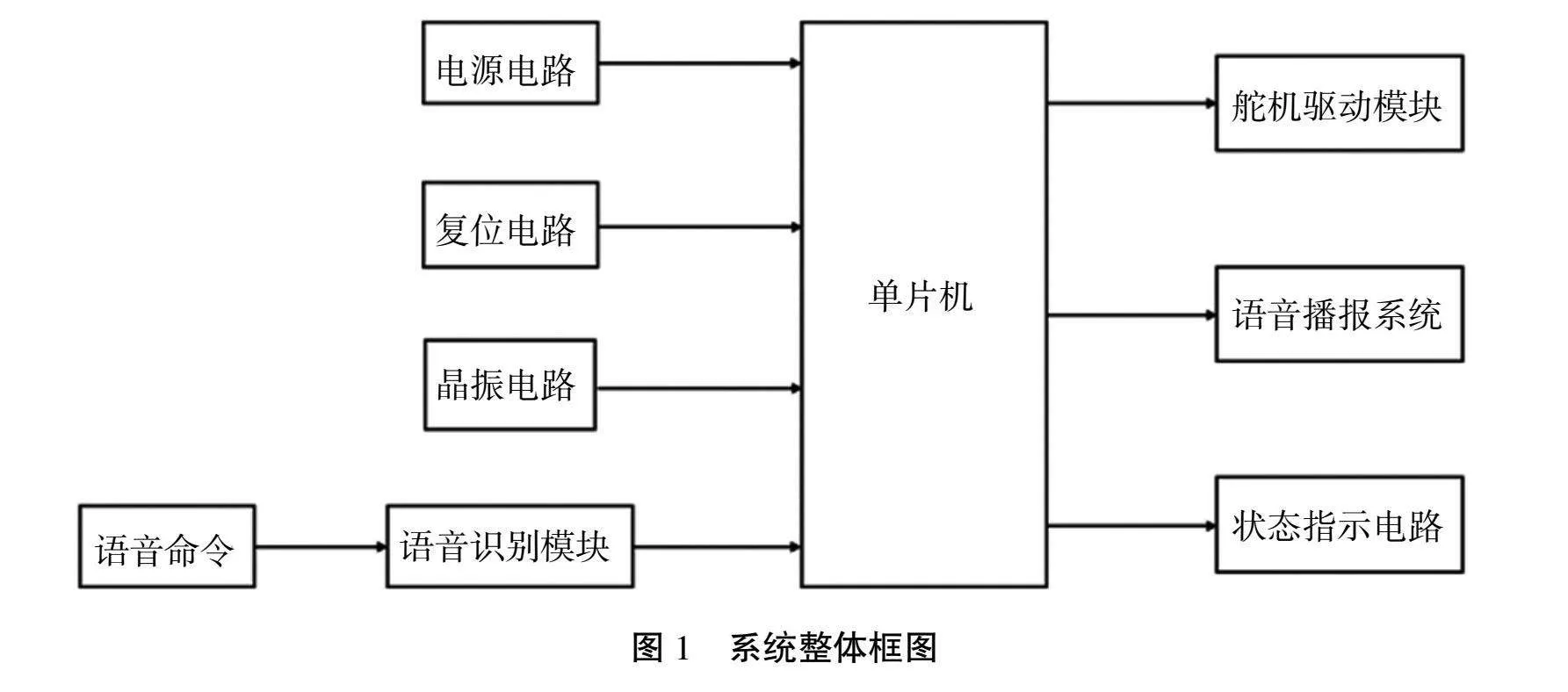
HLK-V20模块在32位RSIC结构中引入了DSP芯片,实现了对数字信号的分析、声音的辨识、浮点计算的FPU操作、FFT加速等功能。在此基础上,提出了一种基于人工神经网络的语音识别方法。模块的系统外设包括UART/I2C/SPI/PWM/I2S/DAC/GPIO/DMic/AMic,用于实现语音识别/声控/人机对话功能。语音识别程序流程如图3所示。
3 实验结论
经过实验验证,本装置对于不同种类的垃圾,能做出不同的反应,语音命令识别垃圾,语音信息通过语音识别模块进入STM32里。STM32首先对语音信息进行分类分析,能进行播报提示垃圾所对应的回收类型,与此同时相应的垃圾桶打开,在液晶显示模块检测所得数据直观地显示出来,也可以通过按键自行打开垃圾桶。垃圾桶通过红外传感器监测是否填满,用红灯绿灯、蓝牙和扬声器来提示用户垃圾桶是否填满的信息,从而进行及时的清理。经过实验验证,系统在语音识别、传感器准确度以及音量控制等对垃圾桶控制方面具有良好的性能。
4 总结与展望
基于语音控制的智能垃圾桶设计代表了现代科技在环境保护和生活便捷性方面的创新应用,旨在提高垃圾分类和管理的效率,减少资源浪费,促进环境可持续性。本文介绍了该系统的核心组成部分和工作原理,包括数据处理模块、超声波测距模块、舵机驱动模块和语音识别模块。通过实验操作,验证了系统在语音识别、传感器准确度以及音量控制方面具有良好的性能。其创新之处主要体现在以下3个方面。
首先是将语音识别技术的有机结合,利用语音识别技术来与智能垃圾桶进行交互,用户只需通过语音告诉垃圾桶要丢弃的垃圾类型,而不需要手动打开垃圾桶或触摸传感器,无须触碰或按压按钮。
其次是语音识别的准确与智能化创新,需要高度准确的语音识别算法。先进的自然语言处理技术和智能分类算法确保垃圾被正确分类,减少错误投放。语音识别技术也可以与其他智能家居或智能城市系统进行整合,进一步提高其扩展性和适应性。
最后则是对于用户体验的收集反馈再使用,语音识别技术的应用还可以用于收集用户口头指令的数据,这些数据可以用于分析用户的投放习惯、垃圾种类的频率分布等信息。
总之,基于语音控制的智能垃圾桶设计为垃圾管理领域带来了创新,提高了效率和便捷性。未来,随着技术的不断发展和改进,我们可以期待这一领域的进一步突破和应用,为环境保护和城市管理提供更多的解决方案。
参考文献:
[1] 戴蒙.英国试验太阳能压缩式垃圾桶[J].环卫科技网,2011(3):6-7.
[2] 虢莉娟.云计算在远程教学信息系统中的应用研究[J].信息记录材料,2021,22(11):179-181.
[3] 周慧珺,许锦标.新型智能垃圾桶的设计方案[J].广东工业大学学报,2006(3):85-88,94.
[4] 何侃,田亚清,李强,等.基于LD3320的语音识别智能垃圾桶设计[J].国外电子测量技术,2015,34(6):85-88.
[5] FELIP G, JORDI L. Emilio Gil Performance of an Ultrasonic Ranging Sensor in Apple Tree Canopies[J].Sensors,2011(3):2460-2477.
[6] QUEIROS R, ALEGRIA F C, GIRAO P S, et al. Cross-correlation and sine-fitting techniques for high-resolution ultrasonic ranging[J]. IEEE Transactions on Instrumentation and Measurement,2010,59(12):3227-3236.
[7] 郑振杰,江衍煊,游德智.单片机结合ULN2003驱动步进电机[J].电机技术,2010(6):44-46.
[8] 孔明,侯蕊,赵军.基于FPGA的语音识别系统[J].仪表技术与传感器,2013(6):78-83.
[9] 王春武,刘春玲,秦政坤,等.基于WT588D模块的语音播报系统设计[J].电子技术应用,2012,38(1):115-117,121.
