基于数字孪生的SCARA机器人工作站在线调试研究
2024-09-30李婵郭付龙



摘 要:由于新时期智能制造飞速发展,传统制造产业亟待优化升级,生产线的改造又存在着开发周期长、成本高的难题。针对这一关键问题,利用数字孪生技术构建SCARA机器人分装工作站在线调试系统框架,依次通过NX UG搭建数字孪生三维模型,设置物理属性与控制信息,建立包含PLC程序、机器人程序、视觉模块等的控制系统,并完成其通信,实现SCARA机器人分装工作站在线调试。该调试方案证实,在升级生产线引进新的机器人工作站时,应用数字孪生技术进行实施前的优化与验证,可以降低开发周期与成本。
关键词:数字孪生;SCARA机器人;分装工作站;在线调试;优化与验证
中图分类号:TP23 文献标志码:A 文章编号:2095-2945(2024)28-0051-05
Abstract: Due to the rapid development of intelligent manufacturing in the new era, the traditional manufacturing industry is in urgent need of optimization and upgrading, and the transformation of production lines has problems of long development cycles and high costs. Aiming at this key issue, the online debugging system framework of the SCARA robot dispensing workstation is built using digital twin technology. The three-dimensional model of the digital twin model is built through NX UG, physical attributes and control information are set, and control information is established including PLC programs, robot programs, vision modules, etc. The control system, and its communication is completed, realizing the online debugging of the SCARA robot dispensing workstation. This debugging plan confirms that when upgrading the production line and introducing new robot workstations, applying digital twin technology for pre-implementation optimization and verification can reduce development cycles and costs.
Keywords: digital twin; SCARA robot; dispensing workstation; online debugging; optimization and verification
工业机器人经历几十年的发展,已经在各个工业领域广泛应用,成为了制造业生产自动化中的重要一环[1],是衡量一个国家制造业水平和科技水平的重要标志[2],其一直是各国智能制造战略的研究热点。工业机器人减轻了工人的劳动强度,提高了生产质量和效率,并快速拉动了宏观经济[3]。SCARA(Selective Compliance Assembly Robot Arm)是一种选择顺应性装配机器手臂,是4自由度(Four degrees of freedom,4-DOF)平面关节型工业机器人,具有结构紧凑、速度快、动作灵活及位置精度高等特点,因此广泛应用于搬运、装配等工作场合[4-5]。近年来我国众为兴、李群、新松机器人、台达埃斯顿和瑞松等企业都推出了较为先进成熟的SCARA机器人[6]。
进入到工业4.0时代,云计算、物联网、大数据、CPS和人工智能等新一代信息技术将会催生大批生智能工厂,并由规模化生产转向定制化生产,机器人的需求量持续增加[7-9],同时也要求将工业机器人融合先进智能化技术,推进机器人智能化应用系统,逐渐实现从单个工作站到整个流水线或系统的智能化升级[10]。如何帮助企业快速升级为适用的自动化生产线,并能够达到节约成本、保证质量、尽快投产的目标,是一个具有挑战性的关键问题。数字孪生技术应运而生,最早由Grieves教授[11]提出,是虚拟空间中对实体产品的镜像,是与之相对应的物理实体的映射。数字孪生技术是指在数字化的空间当中,经过测量、仿真和数据分析,建立与物理实体一对一的现实映射模型,实现对物理实体运行状态的实时监测、处理以及预测,并且可以通过脚本等信号指令对物理实体的行为做出调整[12]。数字孪生融合了多特性、多层次、多维度模拟技术[13],能通过创建数字孪生虚拟模型,在实体生产线建造实施之前,通过虚拟环境中仿真验证,发现设计的不足与缺陷,并进行反复的优化与测试,最终确定最优版本后进行现场实施。因此,其在缩短设备开发周期,提高设计开发效率,减少加工、安装、调试成本等方面起到了积极的作用。
本文运用数字孪生技术,搭建SCARA机器人分装工作站在线调试系统框架,建立其数字模型,通过赋予模型机械、物理属性,与控制系统交互等方法开展工作站运行过程的逻辑性、可靠性仿真及分析,进而提高系统设计的效率。
1 SCARA机器人分装工作站
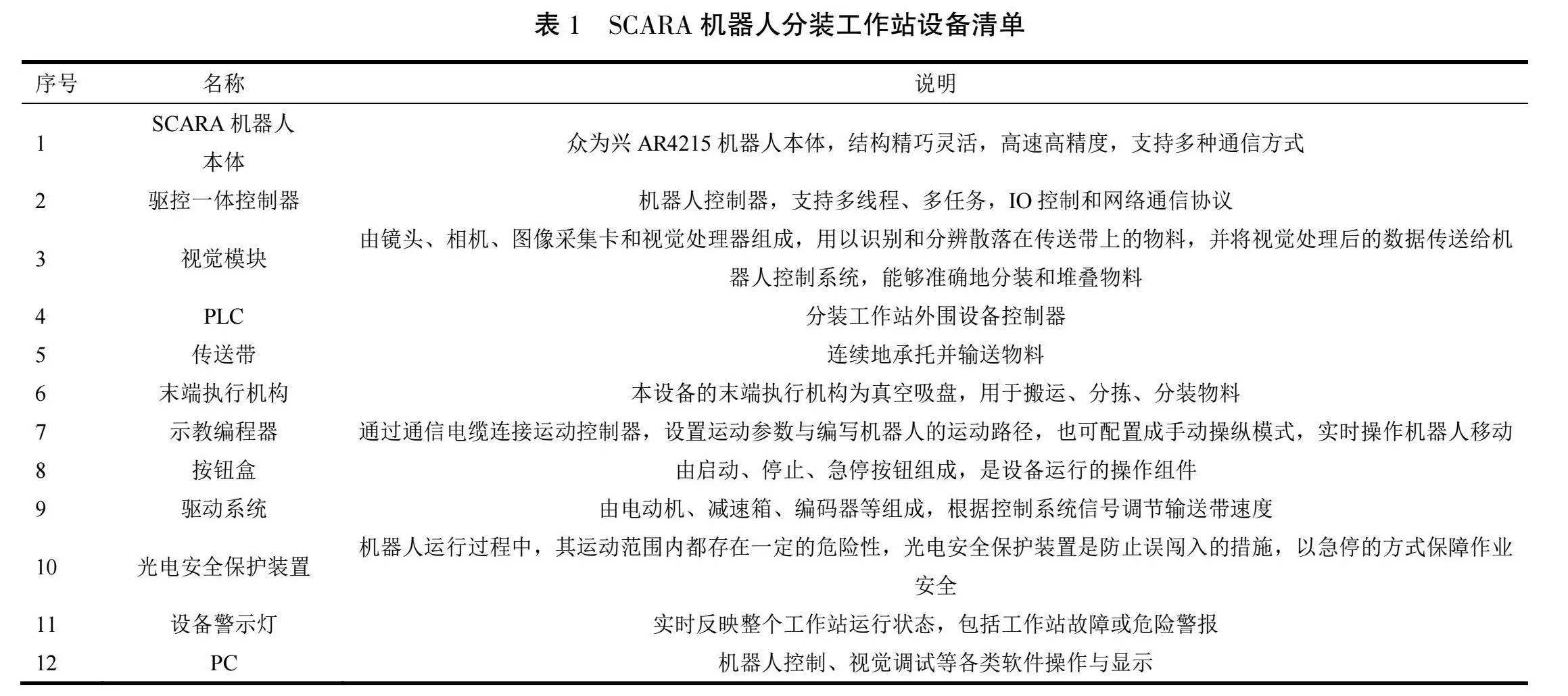
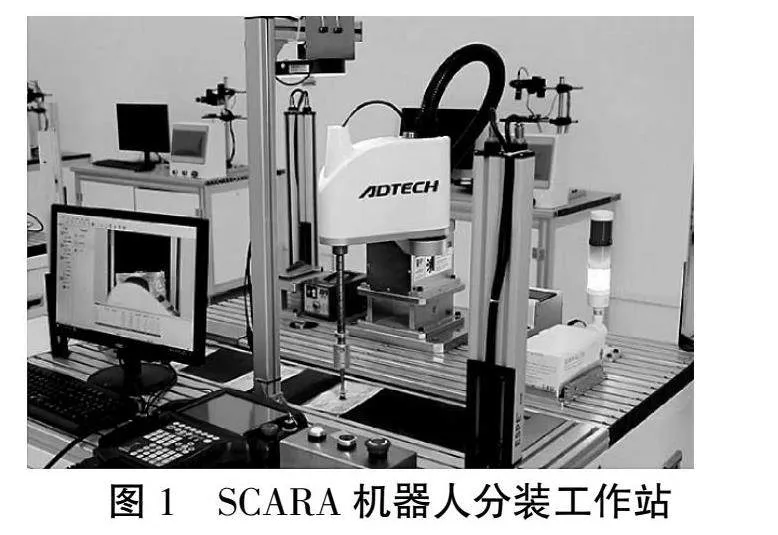
本文的研究对象SCARA机器人分装工作站由众为兴AR4215机器人本体及其外围设备组成,实现物料的分装工作(将50个物料包装成一箱),如图1所示,详细设备清单见表1,机器人的具体参数见表2。
2 SCARA机器人分装工作站数字孪生系统框架
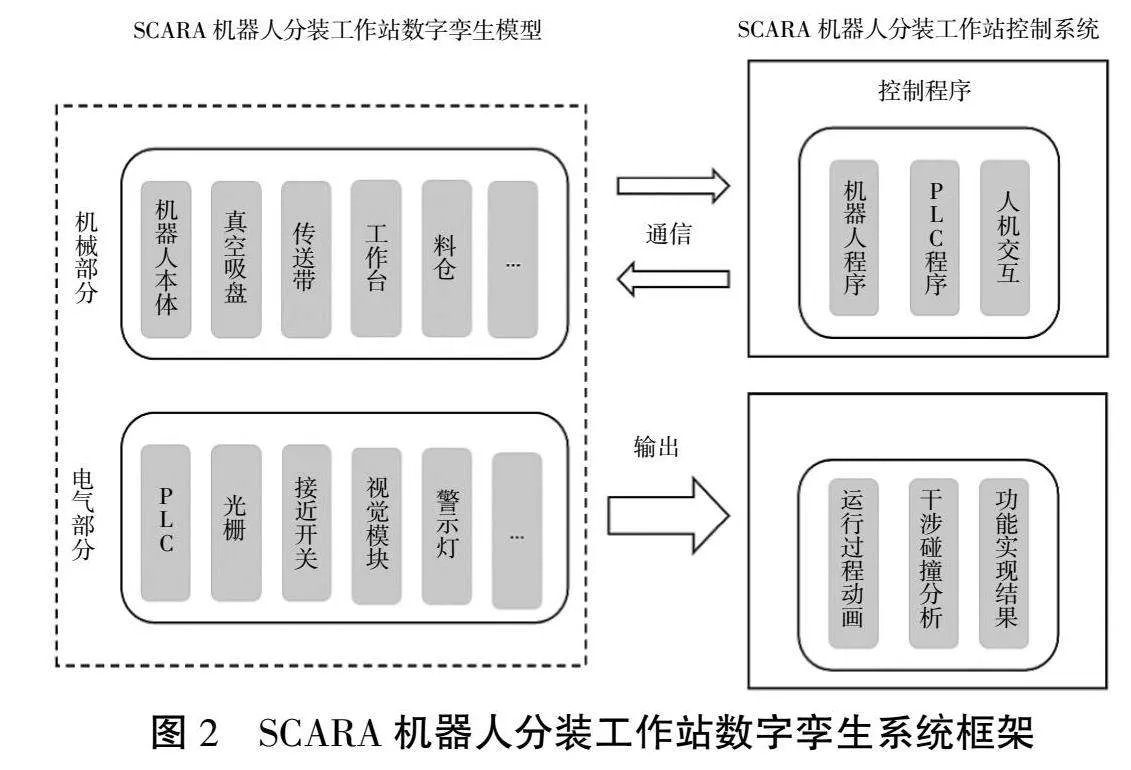
SCARA机器人分装工作站的数字孪生系统包括数字孪生模型和控制系统2部分,其框架原理如图2所示。
数字孪生模型与实际工作站一一对应,包括机械部分和电气部分。机械部分由SCARA机器人本体、真空吸盘、传送带、工作台和料仓等组成。电气部分由PLC、光栅、接近开关、视觉模块和警示灯等组成。控制程序主要包括机器人程序、PLC程序、人机交互等。通过与虚拟控制系统通信,SCARA机器人分装中数字孪生模型的机械部分和电气部分,按照控制系统设定的程序,完成机械作业或者电气反馈。工作人员通过系统的运动过程动画,进行各部分功能检查、干涉碰撞分析、可靠性预检等。
3 SCARA机器人分装工作站数字孪生系统搭建
3.1 数字孪生模型建立
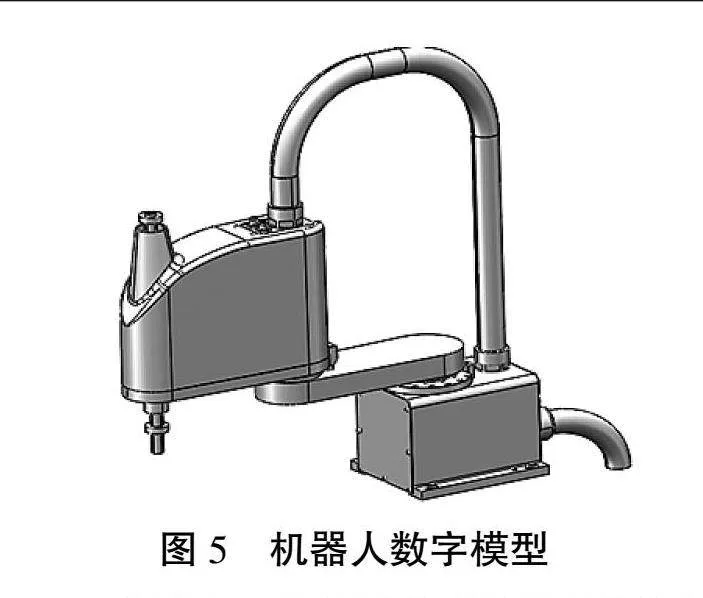
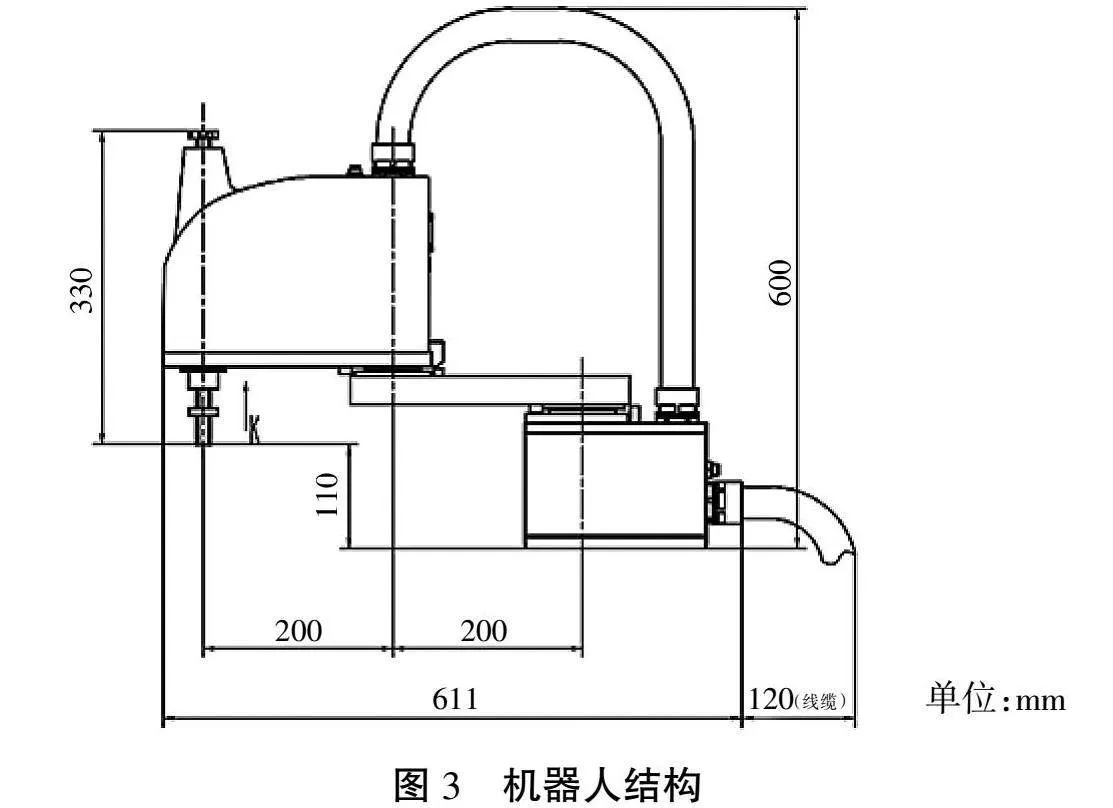
根据AR4215 SCARA机器人的结构(图3)及运动空间(图4), 运用NX UG软件对SCARA机器人工作站进行三维模型建立,如图5所示为机器人本体部分。为了数字孪生模型的可靠性,在模型简化时,各关节的长度等关键尺寸采用实际1∶1尺寸。通过赋予三维模型物理属性,包括重力、摩擦、碰撞等,使之与真实物体具有相同的物理性质[14]。对工作站模型设置物理属性,见表3。
3.2 工作流程设计
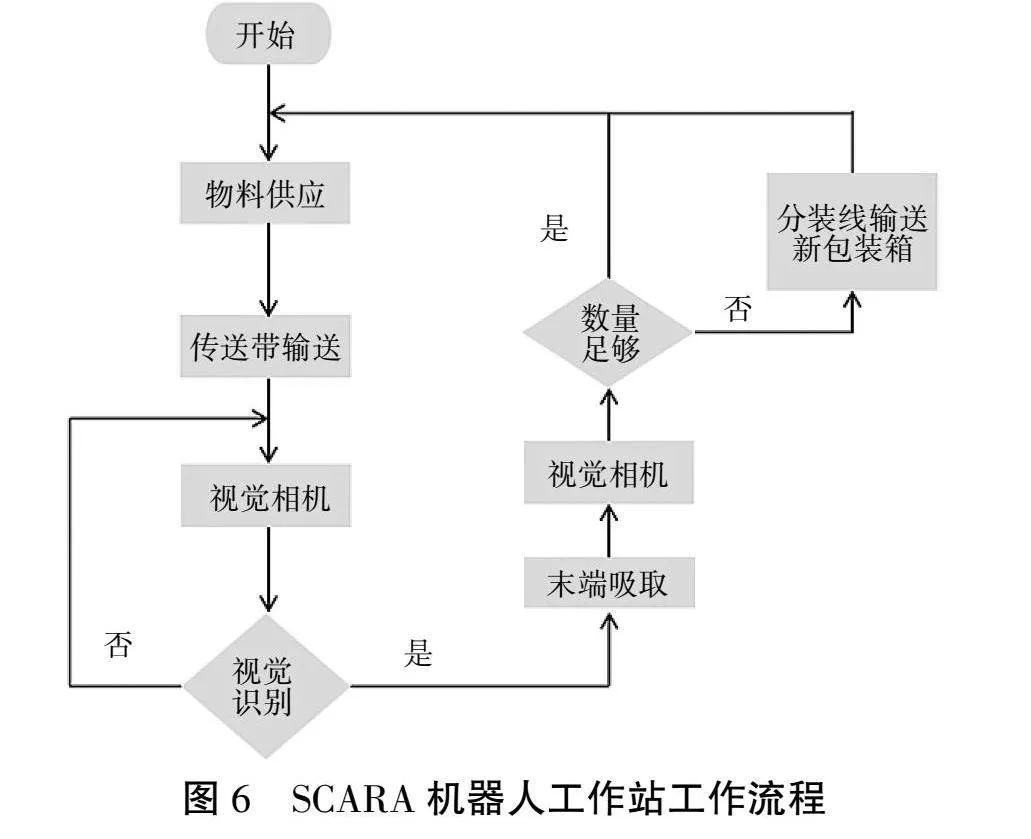
本分装工作站中的SCARA机器人主要完成对物料的识别、搬运、分装工作,具体的工作流程如图6所示。当物料仓有物料,且分装线准备好包装箱时,物料仓以一定频率推出物料到传送带,传送带匀速带动物料至视觉相机拍照范围内。视觉相机拍照后,通过跟视觉库模板比对,识别出的物料由机器人控制系统指挥末端执行器吸取放置于包装箱,未识别的物料通过回流的方式送回传送带。机器人末端进行分装作业时,对所分装物料进行计数,满足包装数量要求后,分装线移动指定距离,输送新的包装箱用于下一箱的包装工作。
3.3 控制系统的搭建
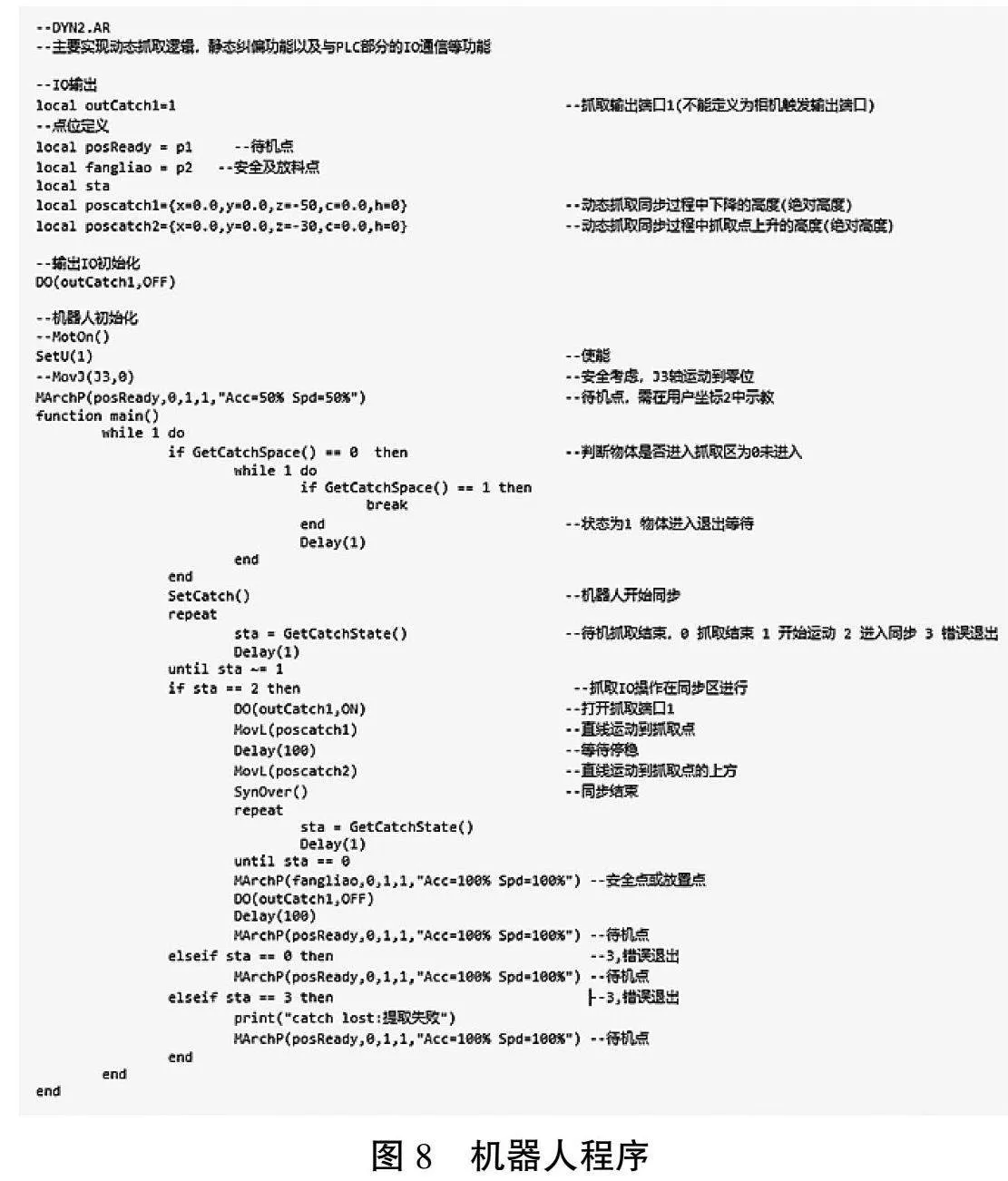
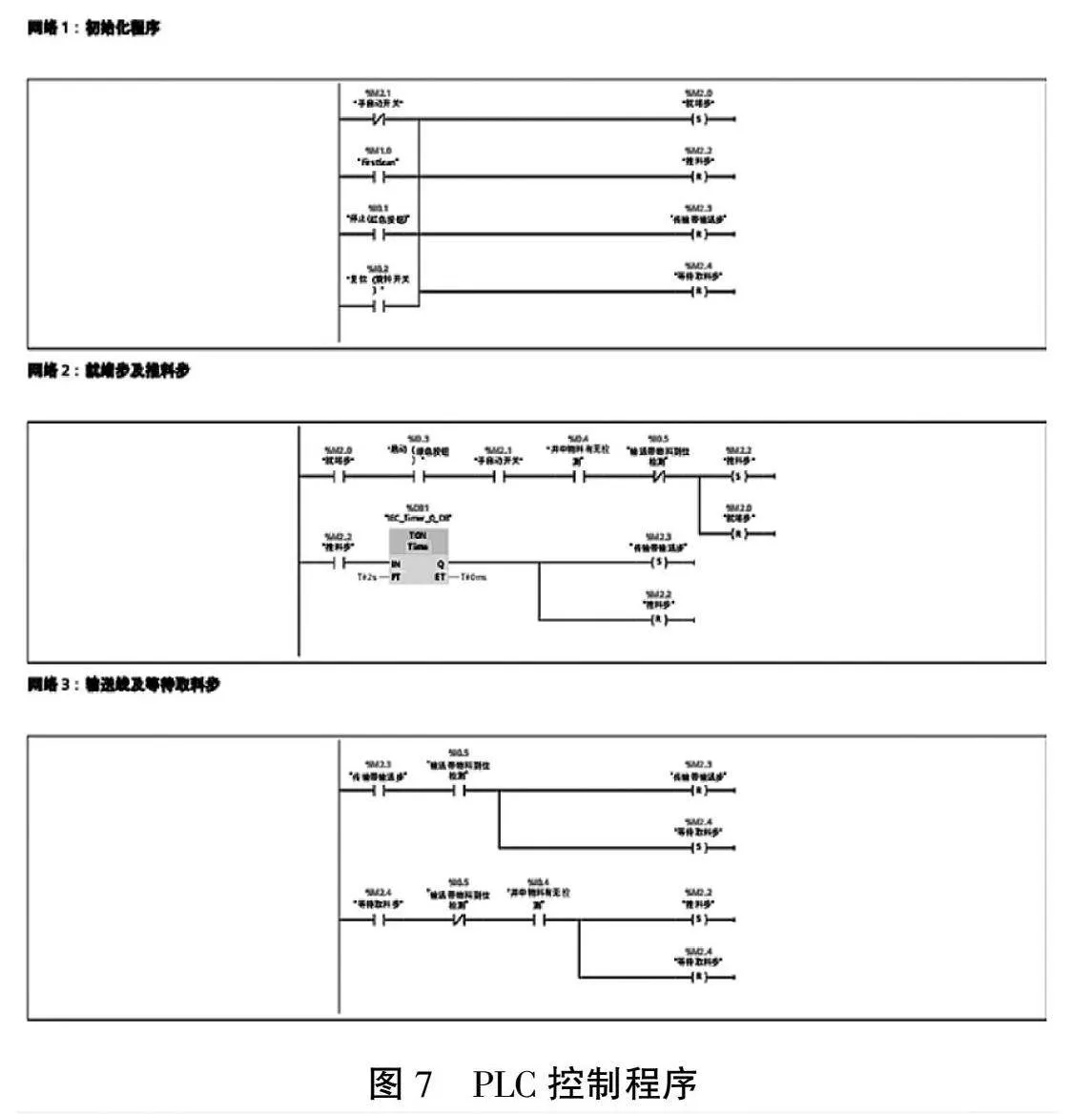
机器人完成分装工作,除了机械部件可以保证实现某些动作外,还需要控制系统能够按照合理可行的控制程序,驱动机器人工作站进行可靠有序的运行。因此,搭建机器人分装工作站的控制系统,包括PLC程序编制、机器人程序编制、数字孪生模型的虚拟I/O端子设置与数据通信等。其中,PLC程序如图7所示,机器人程序如图8所示,视觉模块通信程序如图9所示。
4 SCARA机器人分装工作站在线调试
4.1 通信设置
将数字孪生的机械和电气模型,通过I/O、OPCUA及网络接口等形式与控制系统相连接,实时处理虚拟对象和真实控制系统的运行行为与状态,也就是“实控虚”的操作。
4.2 在线调试
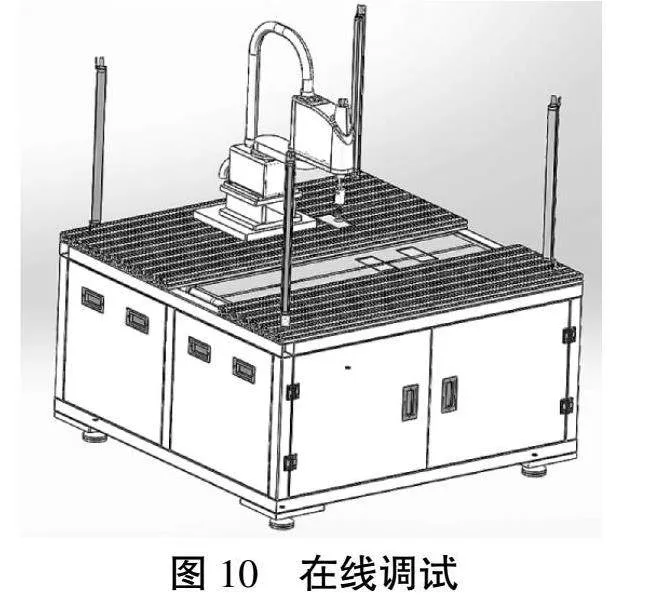
根据SCARA机器人工作站的功能要求,对其进行调试,如图10所示。具体调试内容如下。
1)供料模块的功能:能否根据输送带运行状况,以一定频率推出物料,物料供应的节拍能够根据机器人实际运行状态调整。
2)输送线与视觉模块的匹配性:视觉拍照比对处理的时间间隔到机器人接收信号到吸取动作时间的匹配性,决定了机器人能够准确吸取物料,并完成搬运和分装动作。
3)工作站安全保护系统是否完备:通过在线调试检验工作站在出现可能危及安全的行为时保护措施的实施效果,可以直观地、低成本地试错并验证解决方案。
5 结束语
本研究在参考大量研究实例的基础上,运用数字孪生技术,构建了SCARA机器人分装工作站在线调试系统框架,依次通过NX UG搭建并反复完善数字孪生模型三维模型,设置物理属性与控制信息,建立包含PLC程序、机器人程序、视觉模块等的控制系统,通过I/O、OPCUA及网络接口等形式进行通信,实现了SCARA机器人分装工作站在线调试。
本文提出的在线调试系统方案可以为工业应用领
域提供参考,尤其是在新生产线建设和传统生产线智能化升级时,在引进新的机器人工作站时,应用数字孪生技术进行实施前的优化与验证,可以降低开发周期与成本。这种基于数字孪生的在线调试技术,在自动化设备研发过程中发挥着积极作用,无疑将成为智能制造时代的新趋势。
参考文献:
[1] 孟明辉,周传德,陈礼彬,等.工业机器人的研发及应用综述[J].上海交通大学学报,2016,50(S1):98-10.
[2] 王田苗,陶永.我国工业机器人技术现状与产业化发展战略[J].机械工程学报,2014,50(9):1-13.
[3] 杨光,侯钰.工业机器人的使用、技术升级与经济增长[J].中国工业经济,2020(10):138-156.
[4] 张铁,李昌达,覃彬彬,等.SCARA机器人的自适应迭代学习轨迹跟踪控制[J].中国机械工程,2018,29(14):1724-1729.
[5] 杨明,张如昊,张军,等.SCARA四轴机器人控制系统综述[J].电气传动,2020,50(1):14-23.
[6] 迟洁茹.SCARA机器人的路径跟踪混合协调控制研究[D].青岛:青岛大学,2019.
[7] RUISHU Z, CHANG Z, WEIGANG Z. The status and development of industrial robots[J]. IOP Conference Series: Materials Science and Engineering,2018,423(1).
[8] DOMAE Y. Recent trends in the research of industrial robots and future outlook[J]. Journal of Robotics and Mechatronics, 2019,31(1).
[9] MOHD J, ABID H, PRATAP R S, et al. Substantial capabilities of robotics in enhancing industry 4.0 implementation[J]. Cognitive Robotics,2021,1.
[10] 孙立宁,许辉,王振华,等.工业机器人智能化应用关键共性技术综述[J].振动.测试与诊断,2021,41(2):211-219,406.
[11] GRIEVES M W. Product lifecycle management: the new paradigm for enterprises[J].International Journal of Product Development, 2005, 2(1/2):71.
[12] 严兴煜,高赐威,陈涛,等.数字孪生虚拟电厂系统框架设计及其实践展望[J].中国电机工程学报,2023,43(2):604-619.
[13] HAN L. Research on micro-grid power management under decentralized self-regulatory architecture[J]. Mechanical and Electrical Information, 2019 (23): 27-28.
[14] 郑魁敬,廉磊,郝任义.工业生产线集成控制与虚拟调试研究[J].制造技术与机床,2019(3):128-135.
