智能无人艇关键技术需求分析研究
2024-09-30杨成斌吴晓阳张鲁君刘先越
摘 要:发展具有强人工智能特点的高性能无人艇对于建设海洋强国和强大海上军事力量具有重要意义,也是一项需要广大研究和技术人员长期投入、协同创新、共同开发的复杂系统工程。针对现有研究成果中缺乏从系统整体角度梳理、呈现无人艇关键技术需求的现状,基于系统整体视角,剖析“人艇一体”的理想智能艇所应具备的能力,从而类比得到理想无人艇的8项能力要素。在此基础上,提出一种基于技术-能力映射的关键技术需求分析方法。利用该方法,全面分析并总结制约无人艇走向高度智能化的一系列关键技术,包括人工智能技术、先进平台设计技术、虚拟测试和训练技术等。
关键词:无人艇;人工智能;关键技术;需求;系统分析
中图分类号:U674.7 文献标志码:A 文章编号:2095-2945(2024)28-0008-07
Abstract: The development of high-performance unmanned surface vehicles with strong artificial intelligence characteristics is of great significance for building a maritime power and a powerful naval force. It is also a complex systems engineering project that requires extensive research and technological input, collaborative innovation, and joint development by a large number of researchers and technicians. In view of the current lack of systematic analysis and presentation of the key technological requirements for unmanned vehicles in existing research results, this paper analyzes the capabilities that an ideal intelligent vehicle should possess from a holistic perspective, and then analogically derives eight elements of capabilities for an ideal unmanned vehicle. Based on this analysis, a key technology requirement analysis method based on technology-capability mapping is proposed. Using this method, a comprehensive analysis and summary of a series of key technologies that constrain unmanned vehicles to move towards high intelligence are conducted, including artificial intelligence technology, advanced platform design technology, virtual testing and training technology, etc.
Keywords: unmanned surface vehicle (USV); artificial intelligence (AI); key technology; requirement; system analysis
环境感知、目标识别、信息处理与融合、机器学习与强化学习等人工智能基础技术的日渐成熟,有力促进了军用和民用各领域智能化技术的蓬勃发展[1]。由于世界各国对海洋利益和海上安全方向的高度重视,广阔的海洋空间如今已然成为大国博弈的“主战场”[2]。随着信息技术和人工智能技术的深入发展,以及近年来国际军事力量格局和地区安全形势的持续变化,马赛克战、分布式杀伤、全域联合指挥控制等新型作战概念和军事理论快速兴起,不断演变,现代海战更加强调广域感知、跨域互联、高效协同和智能决策的重要性。在此背景下,智能无人化作战成为现代海战的重要发展方向,海上无人系统集群作战也正在从作战概念走向实装应用[3-4]。在建设海洋强国和世界一流军队的征程中,作为高精尖技术装备和海上新质作战力量重要增长点的智能无人艇,将成为建设海洋强国的关键支撑力量。先进智能无人艇的研究和开发是一项长期而复杂的系统工程,需要广泛调动具有创新和攻坚精神的科研、技术人员参与其中。本文旨在帮助有志于从事智能无人艇研究的广大科研、技术人员从系统整体角度认识智能无人艇的能力要素和结构组成,快速、准确、全面地理解发展先进智能无人艇所需的关键技术。本文在综述有关智能无人艇关键技术需求研究现有成果的基础上,基于系统视角全面剖析智能无人艇的能力要素组成,全面梳理支撑智能无人艇的技术体系,指出智能无人艇走向强人工智能化需要突破的关键技术瓶颈。
1 智能无人艇关键技术需求分析的研究现状
1.1 无人艇和智能无人艇的概念
无人艇是指不搭载乘员、无需专业人员直接操控,能够在一定范围的水域或海上航行、避障的小型船舶。无人艇的出现最早可追溯至19世纪末。当时,著名科学家尼古拉·特斯拉就对一艘无人艇进行了遥控实验,这可视为第一艘无人艇的诞生。20世纪60年代,无人艇被广泛应用于反水雷战,美国曾将一艘汽油机驱动的小艇改装为遥控扫雷艇[5]。不过上述无人艇并不具有先进的传感系统和自主智能系统,需要人为控制,只能称为“遥控无人艇”,还不能称为“智能无人艇”。所谓智能无人艇,是指融入了人工智能技术、具备一定自主行为能力的无人艇,这种自主行为能力通常表现为能够自主完成海洋环境感知、自主定位导航、自主路径规划、航线动态调整与避障,等等。由于人工智能技术已经在无人艇上普遍应用,业内已习惯于将无人艇与智能无人艇这2个概念等同起来,也就是说,人们通常默认人工智能为无人艇所必有的一般属性。为简化表述,以下所说的“无人艇”若无特殊说明,均指 “智能无人艇”。
1.2 现有文献对无人艇关键技术需求分析情况
对无人艇关键技术需求的分析或总结主要在以下3类文献中出现:一是关于海上/水下无人系统技术发展的综述类文献,如文献[2]、[4]、[6—9];二是对无人艇平台某一项关键技术的具体研究,如文献[5]、[10—16];三是关于无人艇/无人平台集群作战运用的探讨,如文献[1]、[17—20]。
1.2.1 综述类文献中对无人艇关键技术需求的分析
文献[2]研究了无人艇集群控制所需的关键技术,包括集群任务分配、集群编队控制和集群避障3个方面的技术,并具体分析了上述3个方面的现有技术手段及其局限性。文献[4]研究了无人机(UAV)集群,水面无人艇(USV)集群和无人水下机器人(无人潜航器,UUV)集群等海上无人系统集群的发展现状,分析了未来海上无人系统集群的发展趋势,并从通信自组网、协同态势感知、任务分配、航迹规划、编队控制和虚拟测试6个方面总结了所需要的关键技术。文献[6]比较全面地研究了美、欧主要国家无人艇的发展历程和现状,从环境感知技术、航迹规划技术、集群控制和协同技术3个方面剖析了无人艇需要解决的关键技术。针对集群控制和协同问题,该文献从航迹跟踪、减摇、避障、编队、博弈和组网通信6个方面详尽分析了其面临的技术挑战。文献[7]认为,无人艇研究的关键技术由控制、导航和感知3个方面组成,目前的无人艇尚不具备完全自主化、智能化的能力,而制约无人艇走向完全自主化、智能化的一个重要因素是现有智能试验手段的局限性和理想无人艇试验平台的缺乏。为此,文献分析了利用数字孪生技术搭建无人艇智能试验平台的优势和可行性。邱志明院士等[8]在系统研究国内外水下无人装备发展现状并提出前沿发展趋势的基础上,分层次地梳理了水下无人装备未来需要发展的关键技术,主要是平台技术、信息技术和智能技术3个技术群,平台技术包括总体设计技术、能源动力技术、布放回收技术等,信息技术包括导航定位技术、探测识别技术、通信组网技术和探测通信一体化技术等,智能技术则分为平台智能化技术和智能集群协同技术,这些关键技术需求分析对于无人艇也具有参考价值。文献[9]基于专利数据和技术关键词频次统计分析,筛选出了智能感知、自主航行控制、先进动力源、动力推进、平台设计、集成/协同智能控制、通信/通讯和可靠性试验等9类海洋无人系统智能装备基础共性关键技术,以及布放回收、有效载荷输送、能效管理等8类海洋无人系统智能装备专用关键技术。
1.2.2 具体技术研究中对无人艇关键技术需求的分析
文献[5]指出,航迹跟踪技术是无人艇实现自主航行的一个基本问题,无人艇航迹跟踪面临的几个具有挑战性的问题包括非线性、不确定性、欠驱动、受限或不可测量的状态、有限的通信带宽以及避障要求等。文献[10]针对利用无人艇布放、回收自主水下航行器(AUV)面临的技术挑战,以及所需解决的关键技术进行了分析,总结了3个方面的关键技术,即AUV集成布放与回收设计、AUV引导捕获装置设计和跨介质协同控制。文献[11]指出,要实现无人机与无人艇之间的空海协同作业,须重点解决机艇空海协同中无人机实时跟踪与精准着艇问题。文献[12]指出,无人艇的关键技术涉及运动控制、智能路径规划、环境感知、网络通信以及信号处理等,其理论基础则涵盖控制理论、运筹学、博弈论、模式识别、图像理解和自动化原理等。文献 [13]指出,受限于自身性能限制和环境干扰,目前无人艇在循迹航行和自主避障能力方面距理想状态仍存在很大差距,路径跟踪和自主避障控制仍是无人艇实现自主航行、保障安全并完成任务急需解决的关键技术。文献[14]、[15]指出,自主避障是为实现无人艇自主航行所必须攻克的一项关键技术,文献针对该问题,研究了利用同时定位和建图(SLAM)技术和多传感器融合技术实现无人艇自主避障的技术方案。文献[16]指出,无人艇的智能算法需要大量训练与试验验证,直接开展物理试验成本很高,风险较大。为此,要发展无人艇航行仿真技术,通过虚拟仿真或硬件在环仿真,提高研制效率,缩短试验周期,降低成本和风险。
1.2.3 作战运用研究中对无人艇关键技术需求的分析
文献[1]调研了国外军用领域人工智能发展规划,指出感知、处理、反馈等技术基础的日趋成熟促进了舰船智能化发展,网络互联、数据支撑、智能控制、自主决策和多域一体协同是发展方向,而智能化状态监控、智能操控技术、目标探测识别技术和作战辅助决策技术则是实现上述发展不可或缺的关键技术。文献[17]分析了利用无人艇引导舰船在复杂海区航行的优势,并从导航和定位、智能路径规划和避障、环境感知和目标识别、通信和协同控制,以及可靠性和安全性技术5个方面总结了无人艇需要进一步解决的关键技术。文献[18]根据集群攻击、分布攻防、弹性防御3种作战运用模式对无人艇的需求,分析了无人艇需要突破的关键技术,具体包括艇型技术、自主规划与控制技术,以及布放与回收技术3个方面。文献[19]研究了为构建海上有人无人分布式协同作战体系需要解决的关键技术,包括协同交互控制技术、协同态势估计技术、协同威胁估计技术、协同航路规划技术、协同目标分配技术、协同资源管控技术,以及协同打击链构建技术。无人艇是分布式协同作战体系中的重要作战节点,因而上述关键技术也与无人艇本身的关键技术有着密不可分的关联。文献[20]从岛礁无人作战对多平台智能集群自主协同作战的需求出发,提出并强调了基于体系原型的演示验证技术、无人作战体系效能评估和无人平台对体系效能贡献率的评估技术,以及集成试验环境作为评估环境搭建技术的重要性。
1.3 现有研究评述
上述文献关于无人艇关键技术需求的研究为认识无人艇技术体系和理解其关键技术需求提供了很好的参考,但是从对无人艇关键技术需求作系统、全面分析的角度看,尚存在以下不足:一是现有的综述类文献中,除文献[7]外,都是针对与无人艇相关、但系统层级更高的水下无人装备、无人艇集群、无人系统集群、军事智能装备等进行的关键技术需求分析,没有聚焦无人艇的关键技术需求分析,而文献[7]虽然谈到了无人艇研究的关键技术主要由控制、导航和感知等3个方面组成,但并没有继续展开分析,而是主要从虚拟试验的角度详细讨论利用数字孪生技术构建无人艇智能试验平台的优势、可行性和具体方案;二是具体技术研究类文献中对无人艇关键技术需求的分析受限于研究范围,主要是针对循迹航行、自主避障等单项技术需求进行了比较详细的分析,对无人艇的其他关键技术即使偶有涉及也只是简单概括,没有完整地呈现支撑无人艇的整个技术体系;三是作战运用研究类文献主要是从有人/无人作战体系的角度提出有关的技术需求,这些技术需求是基于提升整个作战体系效能的考虑提出的,因而并没有分解为无人艇本身的关键技术需求;四是现有的文献并没有从系统整体的角度专门考察无人艇进一步智能化所需的能力簇和系统结构组成,因而对其关键技术需求的分析可能会有所遗漏。为此,本文将从系统整体视角出发,全面剖析无人艇的能力要素和结构组成,并在此基础上进一步分析其关键技术需求。
2 基于系统整体视角的无人艇能力要素分析
2.1 理想智能艇模型
具有强人工智能特征的无人艇是在海上自主活动的智能Agent,应具有与有人船舶高度相似的能力要素。为便于分析和理解,可以从有人船舶入手来回答这个问题,不妨考察一艘核载5名乘员的执法巡逻艇所应当具有的能力要素。假设5名乘员分别负责指挥(指挥员)、操控(操控员)、瞭望(瞭望员)、通信联络(通信员)和执法艇平台巡检维护(维护员),该执法艇的任务是每天在指定海域巡逻若干次,处置巡逻期间可能遇到的他国船只越界侵权行为。在系统整体视角下,我们将这5名乘员和执法艇平台“封装”在一起,视作一个整体,那么这个整体是一个理想智能Agent,称为理想智能艇。
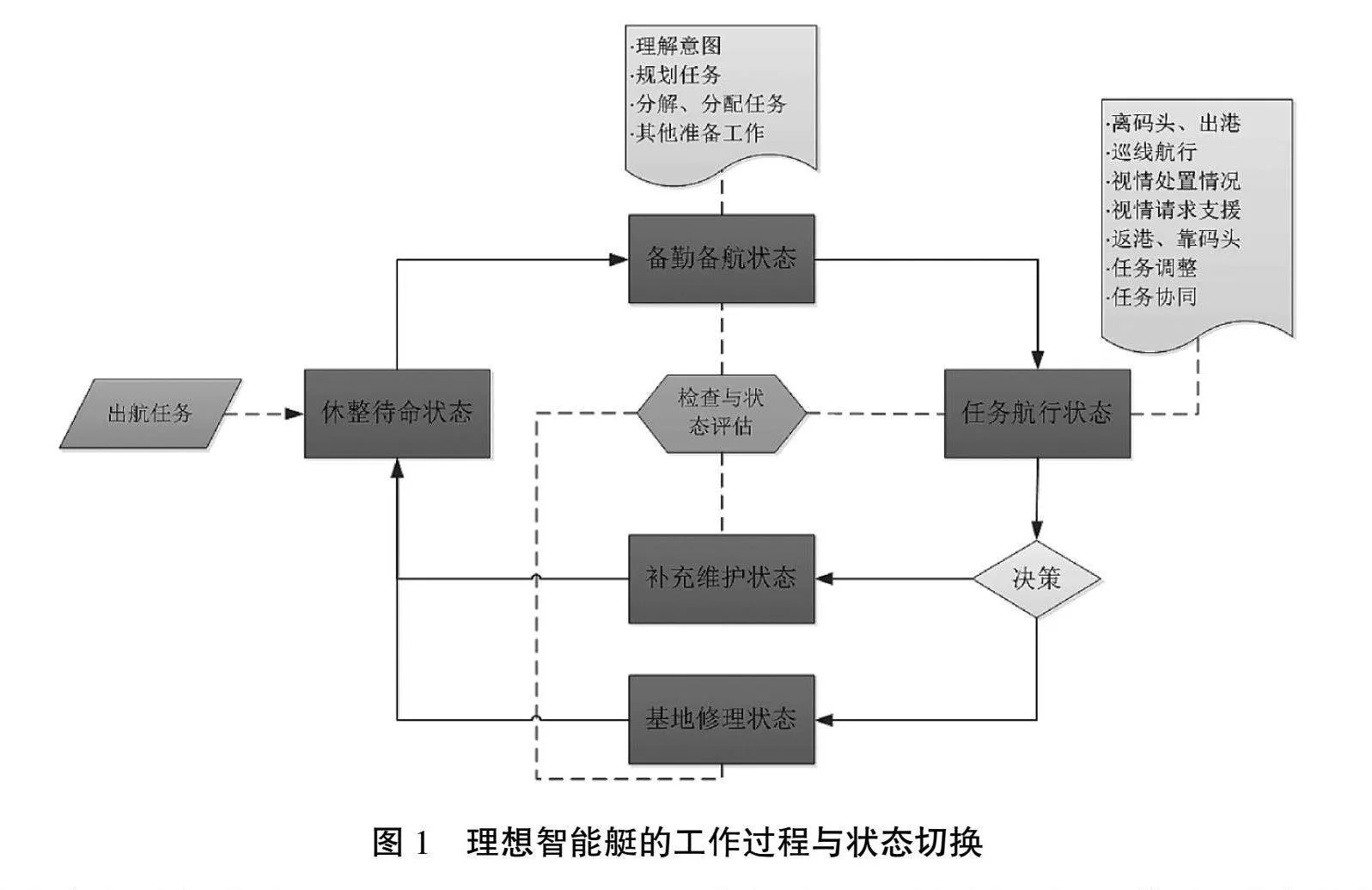
现在基于“警告驱离驶入我领海区域的外国船只”的使命任务来考虑理想智能艇所具有的能力。一般而言,理想智能艇所处的状态可以归纳为5种,即任务航行状态、备勤备航状态、休整待命状态、补充维护状态和基地修理状态。如图1所示,在整个寿命期,理想智能艇不断地在上述5种状态之间相互切换,而促使状态切换的根本推力是由上级指挥机构下达的出航任务。随着出航任务的下达,原本处于休整待命状态的理想智能艇迅速理解上级意图,评估并调整好自身状态,合理规划和安排任务,并完成备勤备航部署,随即进入任务航行状态。任务结束后,理想智能艇则根据需要进入补充维护或基地修理状态,并在完成补充维护或基地修理之后重新转入休整待命状态。
2.2 无人艇能力要素分解
根据理想智能艇的任务使命和全寿命期内的状态切换过程,可对其能力簇作如下分解。
2.2.1 领受任务并理解上级意图的能力
理想智能艇的每一次出航必然有上级下达的出航任务作为行动依据。上级下达任务的方式可以有多种,如临时电话通知、正式文件通知,或被上级批准的航行计划等。理想智能艇的指挥员应该能够通过适当途径接收任务信息,并在领受任务的同时理解上级意图,这是开展后续工作的基础和前提。
2.2.2 检查、评估自身状态的能力
为保证自身安全和任务成功率,在每一次出航之前,理想智能艇必须全面检查并评估自身状态,包括全体乘员是否在位,艇体结构有无破损,机械、电子设备等是否完好可用,油、水、备件等补给品是否充足,等等。理想智能艇通过全面自检,结合任务持续时间和距下一次计划修理时间等因素,对自身状态给出综合评估结论,以尽早发现并消除那些影响任务执行的不利因素,如补充燃油、更换机油、排除设备故障等。在航行过程中和任务执行完毕以后,理想智能艇也要进行状态检查和评估,通过维护员的维护工作或依靠外部支援力量使自身状态保持良好或尽快恢复到良好状态。
2.2.3 任务规划、分解与分配能力
理想智能艇在领受任务并充分理解上级意图之后,就要合理规划任务,如确定航行的目标区域、制定计划航线和情况处置预案等,并根据任务的复杂程度对其进行适当的分解,例如把一次绕岛巡航任务分解为3个子任务,其一是完成离码头、出港和进入计划航线,其二是巡线航行并视情处置违法船只,其三是完成返航、入港和靠码头。为保证任务完成度,提高任务执行效率,指挥员还需要根据每一名乘员的专长和其他方面能力素质进行任务分工与分配。基本的职能分工可以通过规定各岗位的职责清单和各类制定部署表来实现,但一些临时性和附加的任务则需要指挥员根据实际情况进行任务分配。例如,当理想智能艇接近目标船只后,需要对其进行喊话驱离,这时指挥员可根据乘员的执法素养和当前工作状态,决定指派谁前去喊话,执行者可以是瞭望员、通信员,或者指挥员。
2.2.4 循线航行、避碰与离/靠码头能力
为实现循线航行,理想智能艇需要实时获取当前位置、航向和航速,并根据当前位置偏离计划航线的情况适时调整航向与航速,这需要指挥员利用航海设备和仪器获取必要信息并向操控员下达正确的操控指令。在航行过程中遇到静态或动态障碍物时,则需要及时避障,并在避障之后回到计划航线上。如果动态障碍物是其他船只,则需要按照国际避碰规则进行避碰操作。在离/靠码头时,由于转向幅度大、操作空间有限且障碍物较多,通常需要按照机动性更强的方式进行操车和操舵,以便在确保安全的情况下高效完成离/靠码头作业。在避碰和离/靠码头的过程中,通常需要瞭望员更加密切地关注周边态势并及时向指挥员报告有关情况。
2.2.5 环境感知、目标探测与识别能力
这里的环境感知主要是指理想智能艇能够实时感知风、浪、流、水深、温度和气象等环境信息,供指挥员决策使用。目标探测和识别则是指能够在尽可能大的范围内对目标船只进行探测和识别。环境信息主要依靠集成在理想智能艇上的雷达、声呐、测深仪等传感器获得,而对目标船只的识别则不仅需要雷达、AIS等设备提供的信息,还在一定程度上依靠瞭望员与指挥员的经验。
2.2.6 根据处置预案警告驱离目标船只的能力
根据处置预案警告驱离目标船只是理想智能艇的核心任务能力,理想智能艇的存在,以及所有的航行活动及准备工作,都是为了应对巡逻过程中可能发生的此类事件。警告驱离目标船只的过程可简化如下:首先,理想智能艇根据目标船只所在位置和航向航速等信息,调整自身航向航速,接近目标船只,进行跟踪监视和拍摄取证;然后,由艇上乘员对目标船只进行喊话,声明我方身份,明确警告目标船只已进入我领海区域,需立即驶离,否则将遭受强制驱离措施,并在喊话的同时观察对方应答情况和船只实际动向;若目标船只在收到我方警告之后驶离我领海区域,则驱离任务结束,理想智能艇将处置情况及时反馈给上级指挥点;若目标船只在收到我方警告之后仍在我领海区域活动,则理想智能艇对目标船只进行持续跟踪监视和警告驱离,逐渐采取声光拒止、水炮攻击等措施进行强制驱离,并视情呼叫执法力量支援,直到目标船只驶离我领海区域为止。
2.2.7 主动通联和请求支援的能力
不论是在正常航行过程中,还是在执法过程中,理想智能艇都需要与外界(包括岸基指挥点、航行编队中的指挥节点,以及需要通信的其他船舶)保持通信畅通,以便及时传输各类数据信息,实现信息回传和态势共享,根据上级指示对任务作出调整,以及在遭遇突发情况时请求外部支援。因此,理想智能艇不能仅仅满足于接收外界信息,还要能够主动与外界进行通信联络,这在有人参与的情况下根本不构成挑战,但如果完全没有人为干预,可能会产生意想不到的困难,比如主动向上级报告情况的频次,呼叫外部支援的时机,等等。
2.2.8 与其他智能Agent协同的能力
为了在必要时能够与其他智能Agent相互配合,协同完成复杂任务,还需要理想智能艇具有与其他智能Agent协同的能力。需要协同配合的对象可能是同构的,例如相同型号的其他执法巡逻艇,这时需要2艘以上的巡逻艇编队航行,相互之间通过动态通信组网保持通联,并具有明确的指挥关系;但也可能是异构的,比如理想智能艇本身是大型执法船舶上的一艘附属工作艇,在巡逻时需要与母船进行协同,需要考虑巡逻艇的回收和布放问题;又或者是异质的,例如理想智能艇需要与旋翼无人机进行配合,形成空海协同,以充分发挥执法巡逻艇和执法无人机各自的优势,这就需要考虑机、艇速度匹配,以及无人机着艇等问题。对于理想智能艇来说,由于实际上有人员参与,保持编队航行、动态通信组网、工作艇布放回收及机艇协同等问题都可以比较容易解决。
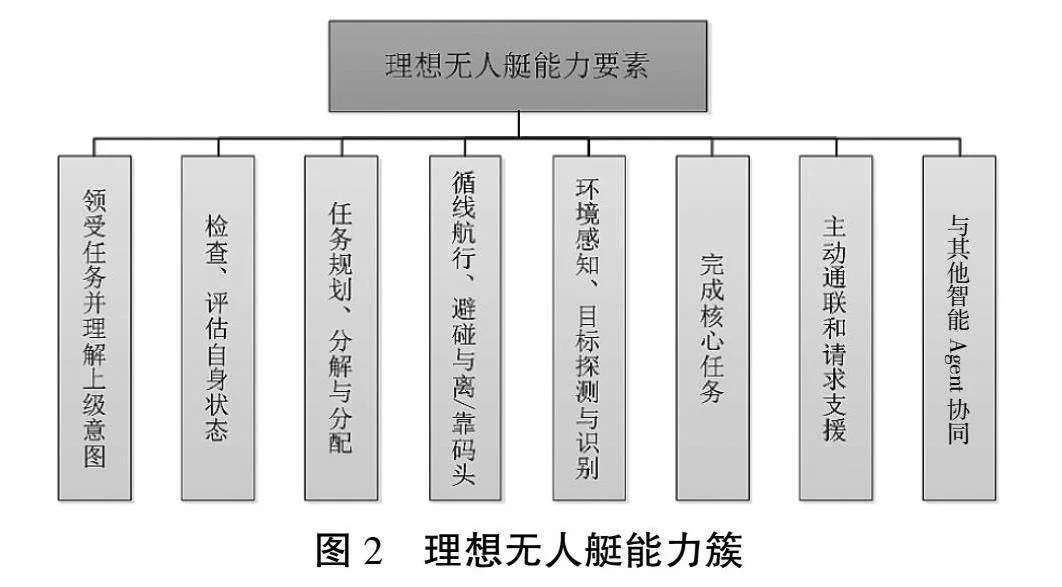
综合言之,用于执法巡逻的理想智能艇需要具备8种能力要素,分别是:①领受任务并理解上级意图的能力;②检查、评估自身状态的能力;③任务规划、分解与分配能力;④循线航行、避碰与离/靠码头能力;⑤环境感知、目标探测与识别能力;⑥根据处置预案警告驱离目标船只的能力;⑦主动通联和请求支援的能力;⑧与其他智能Agent协同的能力。上述能力要素中,第6个能力要素,即根据处置预案警告驱离目标船只的能力,是专门针对执法巡逻艇而言的,如推广到一般的理想智能艇,该项能力要素则应表述为“完成核心任务的能力”,这种核心任务可以是海洋测绘、人员搜救、消防救援、抵近侦察、毁伤评估,乃至火力打击,等等,根据实际任务要求而定。其余的7项能力要素则是理想智能艇的通用能力要素。智能化程度越高的无人艇,其能力也应该越接近上述理想智能艇,具有强人工智能特点的无人艇也应该具备上述8项能力。因此,对于理想状态的无人艇,其能力簇的结构应如图2所示。
3 理想无人艇关键技术需求分析
3.1 基于技术-能力映射的分析方法
为系统梳理智能无人艇的关键技术需求,这里提出一种基于技术-能力映射的关键技术需求分析方法。在有人参与的理想智能艇中,人的因素尤其是人的智能因素,在能力簇的各个能力要素中都发挥了重要作用。在无人艇中,之所以不需要人员参与,是因为具有语言处理能力和决策分析能力的人工智能替代了人的因素。由于人工智能本身也可以视作一种技术,可以认为,无人艇的各个能力要素本质上是由不同的技术构成决定的,因而在技术构成和能力要素之间存在着广义的映射关系,简称为“技术-能力映射”。那么,既然存在理想无人艇的能力簇结构,就可以根据各能力要素反向推演其技术构成,从而分析并确定其中哪些技术是关键技术。
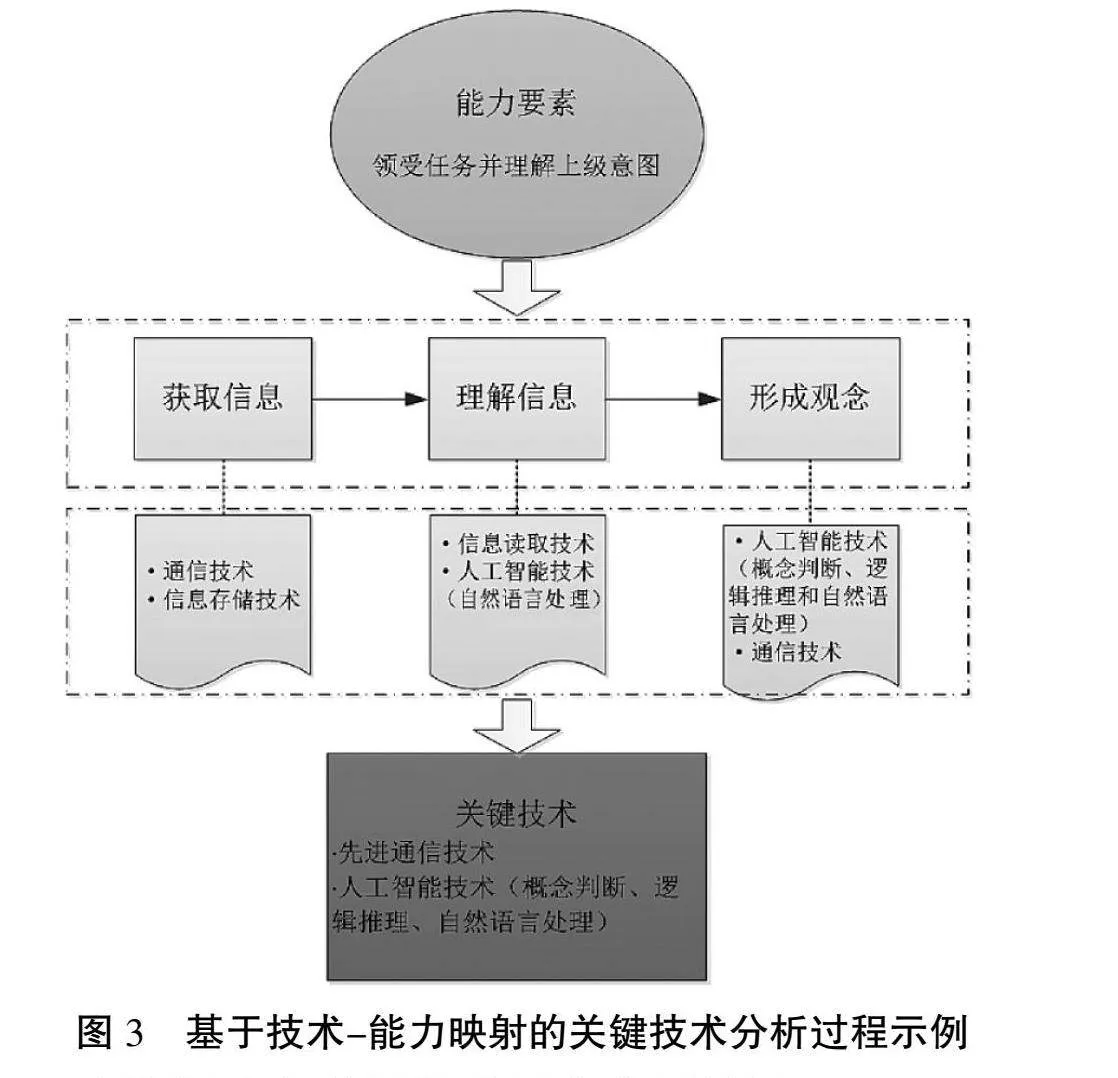
以“领受任务并理解上级意图”能力要素为例,具体分析支撑该项能力要素的技术构成。在有人参与的理想智能艇中,上级以人类可理解的自然语言形式向指挥员下达出航任务,指挥员则从载有任务信息的自然语言中识别信息、理解信息,思考并形成关于“根据上级命令/指示,我们接下来要做什么”这一问题的答案。对于缺乏人员参与的无人艇,则上述过程可以被分解为获取信息、理解信息、形成观念3个步骤。
首先是获取信息,对于无人艇来说,应该通过适当的技术手段,确保其与上级指挥点之间保持全时全天候通信畅通,并能够将来自指挥点的任务信息及时、完整、准确地存储起来。这里主要涉及通信技术和信息存储技术。这2种技术目前都能实现,但远距离、高可靠、低延迟的先进通信技术实现起来有较大难度,因此先进通信技术是关键技术。
接下来,无人艇需要对以自然语言为载体的任务信息进行解读,也就是理解信息。这首先要访问任务信息存储地址,将任务信息提取到语言处理系统,然后根据自然语言与计算机语言之间的解译规则,把自然语言转化为计算机可理解的语言,并识别其中的有用信息。这里主要涉及信息读取技术和基于人工智能的离线自然语言处理技术,后者是一项目前尚未突破的关键技术。
最后是形成观念,在这一步骤中,无人艇根据对任务信息的解读,形成“我们将做什么”的观念,并将其基于任务信息解读形成的观念以自然语言的形式呈现出来,并反馈给上级。这里涉及的技术主要包括能够进行概念判断、逻辑推理和自然语言处理的人工智能技术,以及通信技术,而人工智能技术仍然是其中的重点和难点。
综上所述,通过对能力要素与技术构成之间的映射分析,最终确定了无人艇为获得“领受任务并理解上级意图”这一能力所需要的2项关键技术,即先进通信技术和具有概念判断、逻辑推理和自然语言处理功能的人工智能技术,如图3所示。
3.2 理想无人艇关键技术需求分析结果
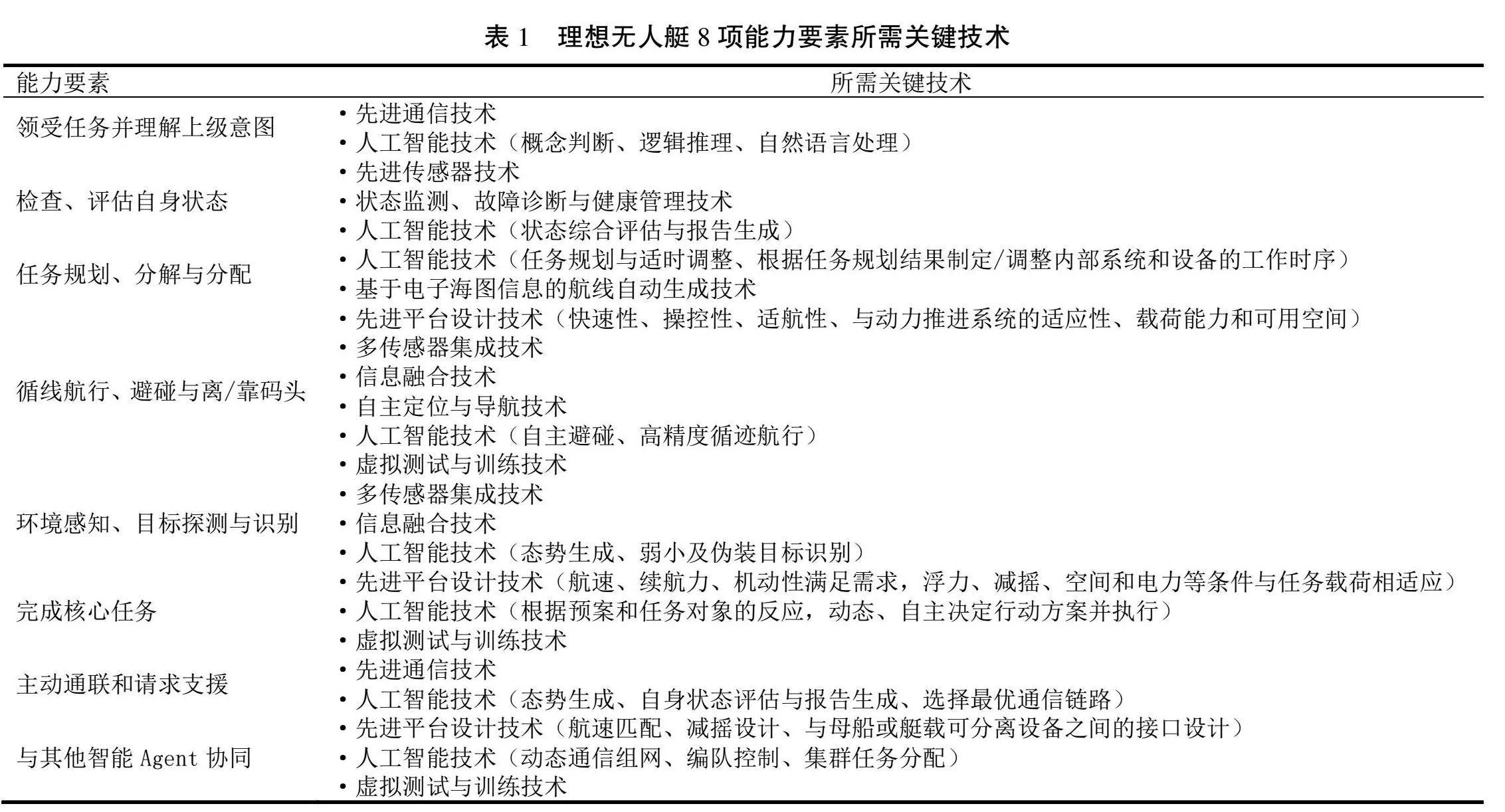
类似地,将上述基于技术-能力映射的分析方法应用于无人艇能力簇的其他7项能力要素,可以分别得到相应的关键技术。表1列出了理想无人艇8项能力要素所需关键技术分析的结果。
由以上分析可知,想要建造一艘能力要素全面且充分的理想无人艇,需要突破的关键技术主要包括:人工智能技术,先进平台设计技术,先进通信技术,信息融合技术,多传感器集成技术,状态监测、故障诊断与健康管理技术,基于电子海图信息的航线自动生成技术,以及自主定位与导航技术。其中,人工智能技术贯穿所有能力要素,其应用涉及概念判断、逻辑推理、自然语言处理、状态综合评估与报告生成、任务规划与适时调整、制定/调整工作时序、自主避碰、高精度循迹航行、弱小及伪装目标识别、决定行动方案并执行、动态通信组网、编队控制和集群任务分配等诸多方面,是当前制约无人艇走向强人工智能化的最大技术障碍。先进平台设计技术和虚拟测试与训练技术的重要程度仅次于人工智能技术,是打造理想无人艇需要持续攻克的两大技术难题。通信技术、多传感器集成技术和信息融合技术既是形成感知能力和任务能力的基础,也是智能系统在使用中积累经验,实现能力增长的关键,必须在现有技术基础上不断提高性能,改进设计方法。另外,状态监测、故障诊断与健康管理技术能有效提高无人艇的在航率和任务可靠性;基于电子海图信息的航线自动生成技术,以及自主定位与导航技术是保证无人艇则是实现无人艇自主航行所不可或缺的关键技术,都必须予以足够的重视。
4 结束语
具有强人工智能特点的高性能无人艇是世界各国都在竞相研发的先进海洋装备,在民用和军用领域都有着很高的应用价值和广阔的应用前景。研发先进的智能无人艇是一项十分复杂的系统工程,需调动广大科研和技术力量,持续发力,久久为功,方能在重大技术突破方面快人一步,走在国际前沿。本文在充分调研最新文献关于无人艇关键技术需求分析的基础上,针对现有研究存在的不足,从系统整体的视角出发,完整梳理了无人艇的8项能力要素。根据能力要素与技术支撑之间的广义映射关系,本文提出了一种基于技术-能力映射的关键技术需求分析方法,并利用该方法系统地分析了理想无人艇所需的主要关键技术。本文的研究结果可为准备从事无人艇研究的学者和技术人员提供有价值的参考,使其能够全面、快速、准确理解无人艇的能力要素和关键技术需求。
参考文献:
[1] 桂士宏,邹念洋,李楠.国外军用领域人工智能发展规划及舰船智能化技术运用[J].舰船科学技术,2020,42(13):174-177.
[2] 鲍凌志,杜家辉,胡辛明等.无人艇集群控制技术研究综述[J].自然杂志,2023,45(3):207-216.
[3] 朱英富,熊治国,袁奕等.现代水面舰船技术发展思考[J].中国舰船研究,2022,17(5):1-8.
[4] 谢伟,陶浩,龚俊斌,等.海上无人系统集群发展现状及关键技术研究进展[J].中国舰船研究,2021,16(1):7-17,31.
[5] 刘志强.基于模型预测控制的无人艇航迹跟踪策略研究[D].武汉:江汉大学,2023.
[6] 张卫东,刘笑成,韩鹏.水上无人系统研究进展及其面临的挑战[J].自动化学报,2020,46(5):847-857.
[7] 平洋,刘文斌,缪正元,等.智能无人艇研究现状及关键问题发展趋势[J].船舶工程,2023,45(2):61-69.
[8] 邱志明,马焱,孟祥尧,等.水下无人装备前沿发展趋势与关键技术分析[J].水下无人系统学报,2023,31(1):1-9.
[9] 李佳佳,王鹏静,汪晓菲.海洋无人系统智能装备关键技术分析[J].船舶工程,2021,43(3):110-116,145.
[10] 洪琼,蒲进菁,周立,等.基于无人艇平台的AUV回收技术发展趋势[J].水下无人系统学报,2023,31(3):501-508.
[11] 李文战.无人机无人艇协同跟踪与着艇方法研究[D].芜湖:安徽工程大学,2023.
[12] 吴伟.基于无人艇视觉的海上目标跟踪研究[D].大连:大连海事大学,2023.
[13] 于双双.无人艇路径跟踪和避障策略的研究及实现[D].大连:大连海事大学,2023.
[14] 齐国庆.基于多传感器融合SLAM的无人艇自主避障研究[D].镇江:江苏科技大学,2023.
[15] 曹想想.基于视觉SLAM的无人艇避障研究[D].镇江:江苏科技大学,2023.
[16] 金建海,周则兴,张波,等.无人艇航行仿真关键技术研究[J].系统仿真学报,2021,33(12):2846-2853.
[17] 于光辉.复杂海区无人艇引导舰船航行问题研究[J].水上安全,2023(10):1-3.
[18] 孙盛智,盛碧琦,刘玉,等.舰载无人艇作战运用模式及关键技术[J].舰船科学技术,2023,45(9):89-93.
[19] 罗荣,周作鹏,王亮,等.海上有人无人分布式协同作战及关键技术分析[J].指挥与控制学报,2023,9(4):372-379.
[20] 赵新路,李兵,陈华,等.岛礁无人作战体系面临的挑战及关键技术分析[J].无人系统技术,2021,4(2):56-61.
