基于活动轮廓模型的SAR图像海岸线检测
2024-09-30邓竣天王小龙
摘 要:SAR图像岸线检测是SAR近岸海洋目标检测的一项重要环节。该文提出一种SAR图像海岸线检测方式,该方法基于自适应混合活动轮廓模型,旨在对灰度不均匀SAR图像的海岸线进行检测。首先对SAR图像进行显著性检测的预处理,然后将预处理后的结果代入混合活动轮廓模型中进行检测。该文采用改良后的CV模型和LIF模型并以其各自的自适应参数为基础进行融合,从而增强整个模型的识别性能。从SAR图象试验的结果来看,这种方式相较于传统的CV模型技术,对灰度分布不均一的SAR图像具有更强的适用性和计算速度上的优化。
关键词:合成孔径雷达(SAR);CV模型;显著性检测;混合活动轮廓模型;识别性能
中图分类号:TN957.52 文献标志码:A 文章编号:2095-2945(2024)28-0001-07
Abstract: Using SAR images in shoreline detection is an important part of SAR coastal ocean target detection. A shoreline detection method for SAR images is proposed. The method is based on an adaptive hybrid active contour model and aims to detect shoreline in SAR images with uneven gray levels. First, SAR images are preprocessed for saliency detection, and then the preprocessed results are substituted into the mixed active contour model for detection. In this paper, the improved CV model and LIF model are used and fused based on their respective adaptive parameters, thereby enhancing the recognition performance of the entire model. Judging from the results of SAR image experiments, compared with the traditional CV model technology, this method has stronger applicability and optimization in computing speed for SAR images with uneven gray distribution.
Keywords: Synthetic Aperture Radar (SAR); CV model; saliency detection; hybrid active contour model; recognition performance
与传统的光学成像系统相比,合成孔径雷达SAR[1]具有全天时、全天候侦察的性能特点,同时具备较强的地表穿透能力,是一种主动式微波成像雷达。海洋天气多变使得传统光学遥感等手段在海洋监测中受到干扰。而SAR的优势使其能够不受干扰地观测到海洋上的状况,因此常被用于舰船目标、油膜污染和海岸线变迁等检测任务中。而在SAR海面舰船监测的应用中,近岸海面舰船的自动检测往往受陆地复杂背景的影响,产生检测虚警率高、漏检等问题,是SAR近岸海面目标检测应用中一直较为关注的问题。而SAR海岸线检测对于近岸海洋舰船检测应用十分重要。由于海岸线受人为、自然影响,变化快速,基于历史岸线数据测量或手动提取岸线的传统方法,在实际应用中十分麻烦。因此,实现一个自动化快速的基于SAR图像海岸线检测方法,对于实际近岸检测目标有十分重要的意义。
在SAR海岸线检测应用中,基本上分为三大步骤,一是预处理阶段,目的是为了除去干扰使检测目标更加明显;二是边缘检测部分,将预处理过后的图像通过阈值分割或者边缘算子等方法检测出海岸线;三是结果评估阶段,将检测得到的岸线与人工标注岸线对比,验证检测方法的作用。
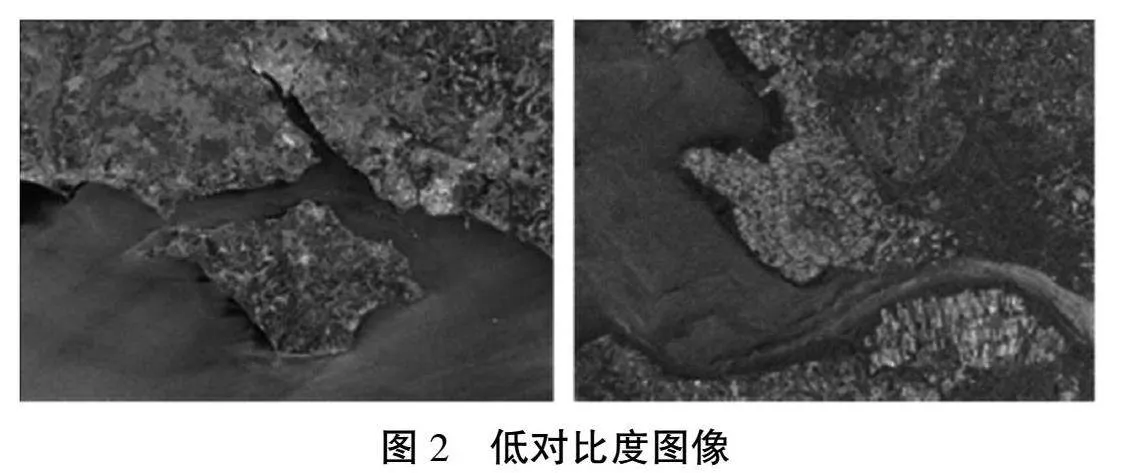
对于低对比度图像的海陆部分的灰度值十分相近。仅从灰度特征难以区分海洋陆地,划分出边界线。由于陆地情况比海洋复杂,陆地的纹理较为粗糙,而海洋的纹理则更加平滑,要提高对低对比度图像的适应性,则要从纹理特征入手。而显著性检测可以很好地改善低对比度SAR图像的图像质量,因此,本文采用显著性检测的方法对SAR图像进行预处理。
经过显著性检测后,低对比度图像也可以用活动轮廓模型进行检测。将检测后的显著图输入到CV模型中进行检测,可以发现,传统CV模型对于灰度不均匀SAR图像的适应性较差,因此,需要对CV模型进行改进,提升其对于灰度不均匀SAR图像的适应性。
所以,文章提出了一个基于优化的CV模型的自适应混合活动轮廓模型。本文首先对CV模型进行改进,主要对其中的公式进行变换,加快整体模型的运算效率。其次,再结合基于局部的几何活动轮廓模型LBF模型以及LIF模型的特征,它们对于灰度不均匀图像的检测性能较好,但是对于初始轮廓的要求较高,需要初始轮廓接近于所检测轮廓的边缘,所以它们与传统CV模型的特点互补,可以混合应用。本文提出了一种基于改进CV模型的自适应混合活动轮廓模型,利用自适应系数连结这两类模型,改善整体模型对于灰度不均匀SAR图像的检测效果。
活动轮廓模型检测后的图像往往有许多黑白孔洞,一些是由于海面上舰船的干扰,另一些是由于陆地上复杂的地形产生的误检。对于这些误检,本文采用泛洪填充算法。在进行二维图像处理时,泛洪填充算法通常使用四邻域像素填充法、八邻域像素填充法和基于扫描线的像素填充方法。为了尽可能地填补孔洞,采用的是四邻域与八邻域相结合的方法,对于离轮廓较远的区域内采用八邻域法,对于接近轮廓的区域采用四邻域法以保证轮廓的完整性。
1 算法原理
1.1 显著性检测
根据人类视觉系统相关理论,视觉处理机制遵循基本检测规律,即对高频常态响应进行抑制,对低频异常响应进行感触。对于目标的检测而言,就是对常态背景忽视,而主要关注非常态检测目标。依据这个机制,人眼能够自然而然地将包含目标的区域从背景中提取出来,并且聚焦在目标身上。这其中包含目标的区域,具有视觉显著性特征,因此这种区域又被称为显著性区域[2]。
随着对人类视觉系统的认知不断加深,众多计算机视觉领域的学者开始对这种视觉检测机制进行研究,目的是使机器能够像人眼一样智能地识别出目标区域。许多研究者已经针对视觉显著性目标检测进行了深入探讨,他们来自不同领域如认知神经学、信息理论和频率域等,并提出了一系列可以实施的目标检测模型[3]。值得一提的是,最早的基于频率域来处理图像显著性的方法是由Hou等[2]于2007年所提倡的谱残差法(SR)。这个方法的原理容易被理解,其执行过程相对简便,能快速识别出显著性区域且准确度较高,对于大多数环境都有广泛适用性。
谱残差法(SR)这种显著性检测方法,是通过对频谱进行分析而构建的一种视觉显著性模型。此种策略以图像的背景为起点,并借助与目标特性或类别无关的前置信息,以此识别可能存在视觉显著性的潜在目标区。这种方法所依据的是,来自不同图像的log幅度谱有着类似的分布特点。这种特征表示图像的冗余信息,去除这部分信息,得到的便是引起人眼注意的显著信息。
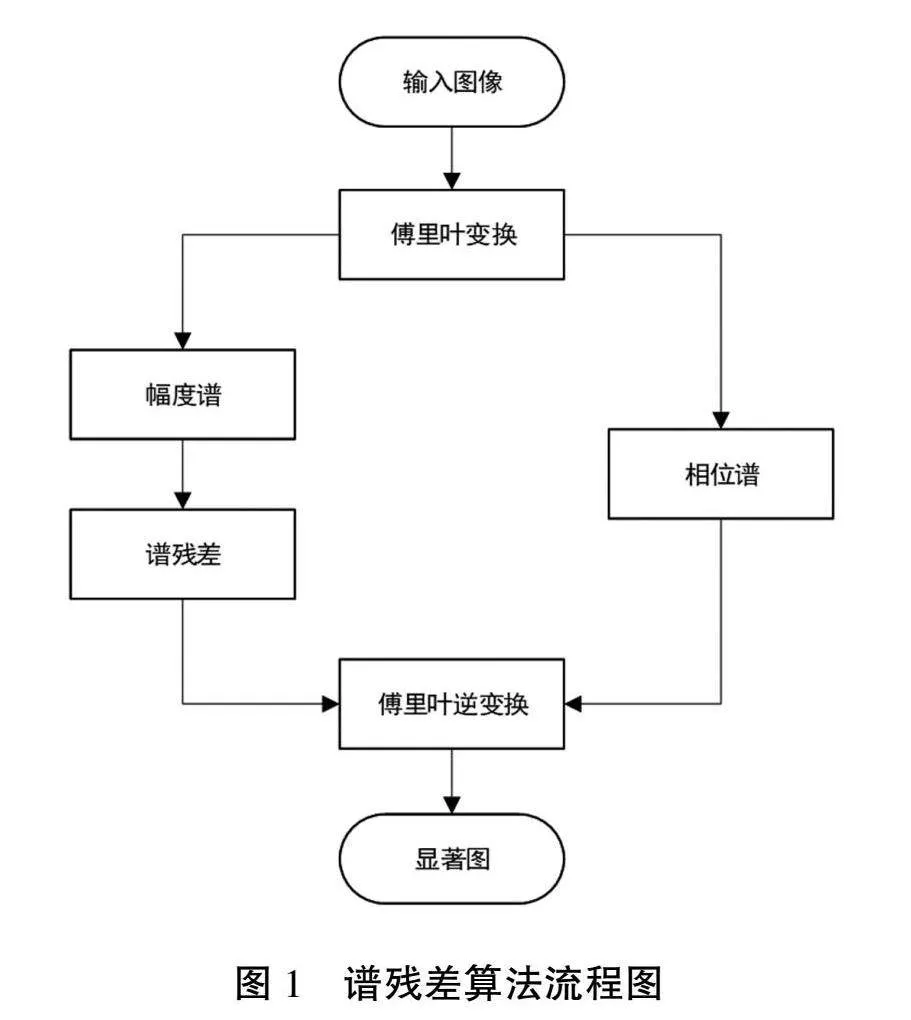
谱残差法的具体检测流程图如图1所示,将图像通过傅里叶变换分解出log振幅谱和相位谱,进而得到log残差谱,对其进行逆变换,得到显著图。
本文所采用的SAR图像预处理方法便是谱残差算法,低对比度图像经过谱残差算法的处理后,可以比较清晰地分辨出海陆分界线。
1.2 活动轮廓模型
活动轮廓模型[4]是在1988年首次提出的。经过多年的发展,它已经成为计算机视觉领域一个重要的图像分割技术,在医学图像处理领域也得到了广泛的应用。这种方法的好处在于易于人们理解操作,能够将先验知识融入到图像处理中,准确地找到目标的边缘。它的基本原理是寻找最小化能量的样条,初始曲线会受到外部约束力和图像力的影响,从而指向目标的边缘。当这2种力相互抵消为0时,曲线停留在目标轮廓的边缘。相对于以往分层的图像分析方法,Snake模型提供了一个统一的数学描述,包括了边缘、线条、目标轮廓的检测以及立体匹配问题。用户也可以根据自己的需求对曲线施加约束力,引导曲线到感兴趣的特征区域,具有一定的交互性。活动轮廓模型的研究方向主要有参数活动轮廓模型和几何活动轮廓模型这2个方面[5]。CV模型属于几何活动轮廓模型,相比于参数活动轮廓模型更利于拓扑结构的检测。
Chan和Vese于2001年提出了CV模型[6],该模型是基于简化的M-S能量泛函的变分水平集模型。
CV模型利用曲线上的力来推动曲线向最佳轮廓位置移动,通过能量曲线将图像分为内部与外部2个区域,分别表示为outside(C)和inside(C)。在图像的空间Ω中,CV模型的能量泛函如公式(1)所示。
式中:c为寻找的最优轮廓;I为初始图像;?滋、v分别为曲线长度权重和包含区域面积权重;?姿1、?姿2各自描述了曲线内外部能量参数;c1和c2则是拟合中心,它们各自展现出曲线内外部区域的灰度平均值。
用φ[7]这个水平集函数来描述上述的能量泛函,可以把求解该能量泛函问题转化为在高维空间中寻找零水平集问题。可以得到由φ(x,y)所代表的能量函数
式中:H(φ)表示单位阶跃函数。
根据变分原理进行相应的推导,可得能量函数的偏微分方程为
由于其对于图像起始轮廓曲线的定位和图像中存在的噪声具有一定的抵抗力,因此,CV模型被广泛研究并实际使用。这主要归因于它依赖于图像的整体区域信息来实现图像划分。然而,该模型无法应对颜色分布不均一的图像,且计算速度相对较慢,特别是在面对大量像素的图像时,可能耗费更多的时间执行任务。
1.3 改进CV模型
在实际处理SAR图像时,情况往往比理想的二值黑白图像更加复杂。有许多灰度不均匀的地方,活动轮廓在演化的过程中,往往会陷入这些极大极小值中,形成各种误检的孔洞。因此,本文决定对于CV模型进行一定的改进,使得CV模型对于灰度不均匀SAR图像的检测效果也能得到改善,并提升CV模型一定的运算效率。
由于传统CV模型是通过差的平方的形式构成的,这种驱动力的计算比较复杂,容易使得模型的分割效率一般。对于传统CV模型的水平集函数表达的后面2项,也就是驱动力能量项为
若将?姿1和?姿2置为1,则1-H(φ)和H(φ)相当于轮廓内外相反的方向,则这2项可以合并,将2项做平方差公式可以得到
这种形式去除了平方项,使计算的效率可以提升一些。
其次,由于陆地的情况往往比较复杂,有各种建筑、山脉、道路等干扰项,如果仍用单一的均值来表示轮廓内的灰度信息,就容易出现各种严重的误检,因此,这种表示是不准确、不完整的。
因此,本文通过对图像演化曲线内部像素进行K-means聚类处理,得到若干个聚类中心点,并使用这些中心点的值来替代CV模型内部的拟合值;通过将均值和聚类中心值进行线性组合,来拟合轮廓内的平均值
。 (6)
将公式(5)和公式(6)代入到CV模型中,可以得到由水平集函数表示的能量泛函
式(6)中:β值为权值(0<β<1),面积项可忽略不计。选取聚类中心值中较大的值进行拟合,这样更容易将海陆进行区分,使轮廓的驱动力更大,加快模型演化的速度。将聚类中心值加入均值的拟合中,使得模型拥有一部分的局部性,这加强了模型对于SAR图像检验的鲁棒性。
综上所述,本文通过引入参数赋值、平方差公式、K-means均值聚类这些方法去改进传统CV模型,由模型分析可知,改进的CV模型对灰度不均匀SAR图像的检测性能及运算效率都得到提高。
1.4 混合活动轮廓模型
改进后的CV模型虽然对灰度不均匀SAR图像的检测性能得到提升,但是,通过实际SAR图像检测应用发现,改进算法的检测结果仍旧会出现许多误检孔洞。为了减少这些孔洞,进一步提升算法的检测效果,本文进一步采用了基于区域的活动轮廓模型来辅助改进CV模型进行检测。对于基于局部的活动轮廓模型而言,其算法优势在于灰度不均匀SAR图像的检测能力,但其缺点是对于初始轮廓较为敏感,因此,采用扬长避短的研究思路,可以先通过改进CV模型来确定海岸线的初始轮廓,然后,利用基于区域的活动轮廓模型进行边缘的细化。
本文采用混合模型的方法结合2个模型,线性组合局部项与全局项,得到最基本的能量泛函形式
式中: 为长度正则项,以及防止水平集重新初始化的正则项。全局EG项代入改进CV模型,局部项传统的做法是代入LBF模型[8],但是由于LBF模型运行效率太低,本文这里采用更加高效的LIF模型[9]。
1.4.1 LIF模型
LIF模型使用分段光滑函数对原始图像进行模拟,具体说来,对于图像区域Ω内的任意一点x,可以定义图像的局部灰度逼近函数。
, (9)
定义图像局部加权平均灰度m1和m2的方式如公式(10)所示
,(10)
式中:Wk(x)是指一个矩形类型的窗口函数。LIF模型中选用了一个大小为(4k+1)×(4k+1)的矩形窗口函数Kσ(x),这里σ代表了标准差,而k则是满足条件小于σ的最大整数。
LIF模型的能量泛函定义为
依据变分法和梯度下降流策略,LIF模型最后的水平集演化公式为
尽管LIF模型可以精确地区分灰度不均匀的图片,然而其仅考虑了图像的部分区域的平均灰度值,并未包含整体图像的信息。因此,与其他的局部方法类似,它虽能在处理灰度不均匀的图片时表现出色,但在初始轮廓大小、形态及定位上却非常敏感。
1.4.2 自适应混合活动轮廓模型
本文引入LIF模型作为混合轮廓模型的局部项,并用自适应系数ω将它与改进过后的CV模型联系起来。由于有CV模型的作用,初始轮廓可以随意设置。一开始,模型主要靠改进后的CV模型将轮廓初步锁定在海陆边缘附近,然后再通过自适应系数,使LIF模型发挥边缘细化作用,将轮廓进一步优化,以此来解决灰度不均匀情况下的SAR图像海岸线检测问题。
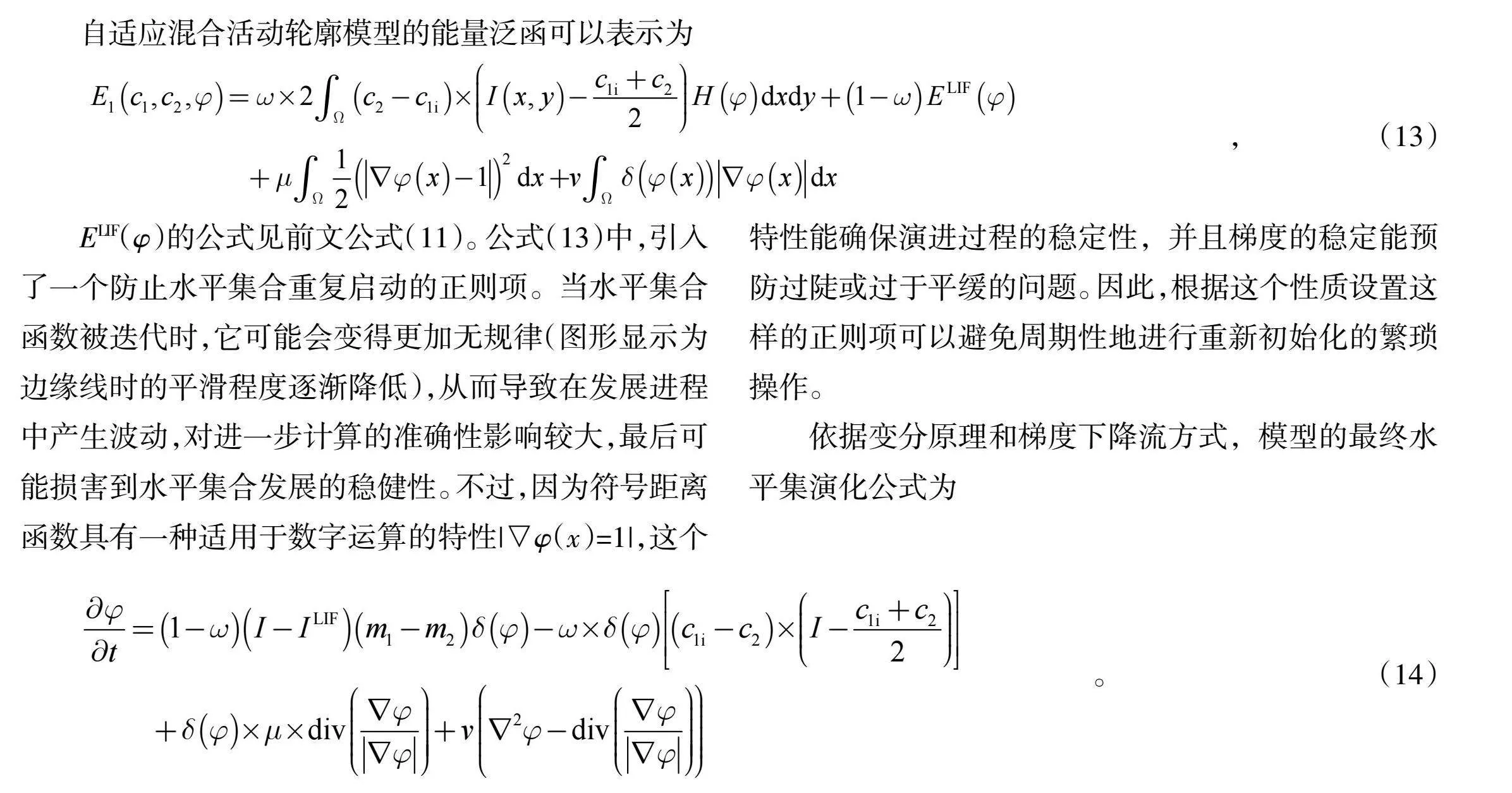
ELIF(φ)的公式见前文公式(11)。公式(13)中,引入了一个防止水平集合重复启动的正则项。当水平集合函数被迭代时,它可能会变得更加无规律(图形显示为边缘线时的平滑程度逐渐降低),从而导致在发展进程中产生波动,对进一步计算的准确性影响较大,最后可能损害到水平集合发展的稳健性。不过,因为符号距离函数具有一种适用于数字运算的特性|?荦φ(x)=1|,这个特性能确保演进过程的稳定性,并且梯度的稳定能预防过陡或过于平缓的问题。因此,根据这个性质设置这样的正则项可以避免周期性地进行重新初始化的繁琐操作。
依据变分原理和梯度下降流方式,模型的最终水平集演化公式为
式中:ILIF是前文1.4.1中的LIF模型,表达式为
。 (15)
c1i是轮廓内聚类中心值与均值的线性组合,这里的β权值采用0.5。
。 (16)
另一个权值ω应当根据迭代的次数进行自适应变化,在n较小的时候,ω接近于1,再经过几十次演化迭代后,ω接近于0,这样特征的函数有许多,选择其中一个作为权值ω的表示,具体函数为
其中ω随着n的增大而减小,最后趋近于0,使混合活动轮廓模型一开始是由改进CV模型占主导的驱动,后来则由LIF模型来逼近轮廓,符合期望,(30-n)中的30和n前的系数1通过多次实验确定。
经过采用前文的算法设计与改进,自适应混合活动轮廓模型对于灰度不均匀SAR图像的检测性能得到了进一步提升,对比改进CV模型而言,去除了部分误检孔洞,使初步检测结果更加良好。
2 实验结果与分析
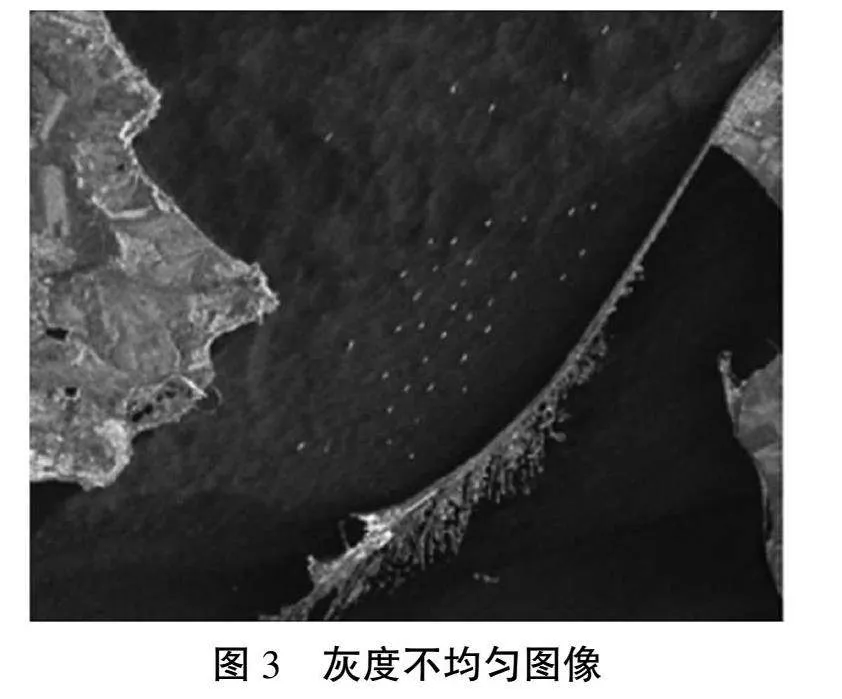
本文针对SAR图像岸线检测中2类较为突出的难点问题:①低对比度图像(图2)中,难以区分陆地与海洋的问题;②灰度不均匀图像(图3)中,易出现误检、漏检,导致多孔洞的问题。针对以上问题分别采用相应SAR图像数据进行了算法验证和分析。
此外,为了进一步验证本文算法的适应性,还分别采用星载和机载SAR图像进行初步的适应性实验。
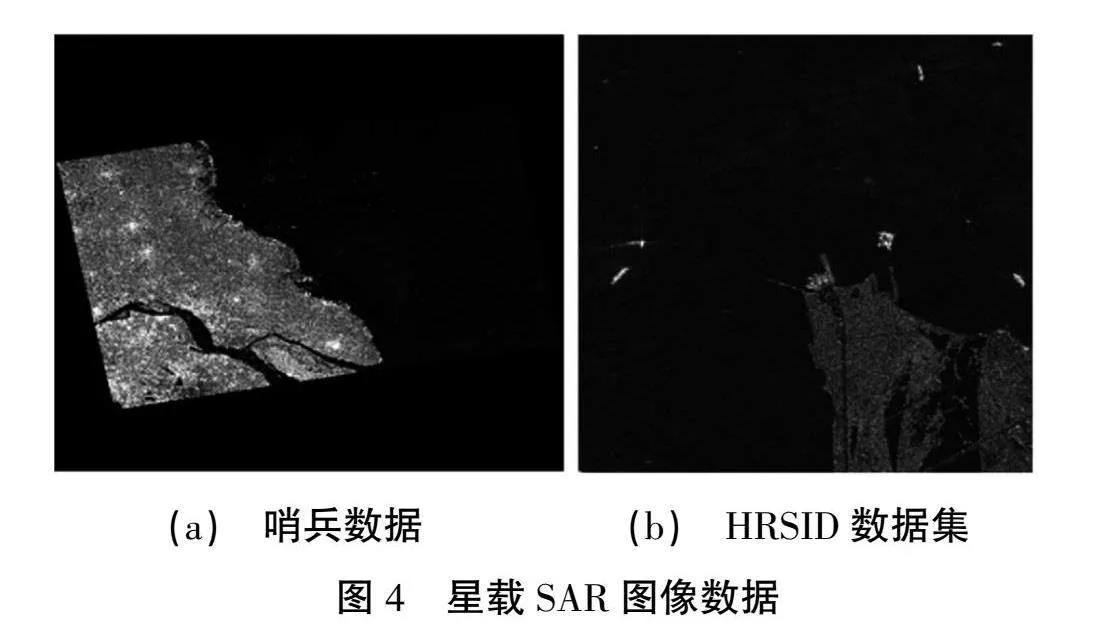
星载SAR图像。本文适应性实验运用的星载SAR图像采用了2个不同的的数据源:一个是哨兵1号卫星获取的SAR图像(公开数据源),另一个是来自HRSID数据集(SAR图像数据集)的海陆SAR图像,如图4所示。
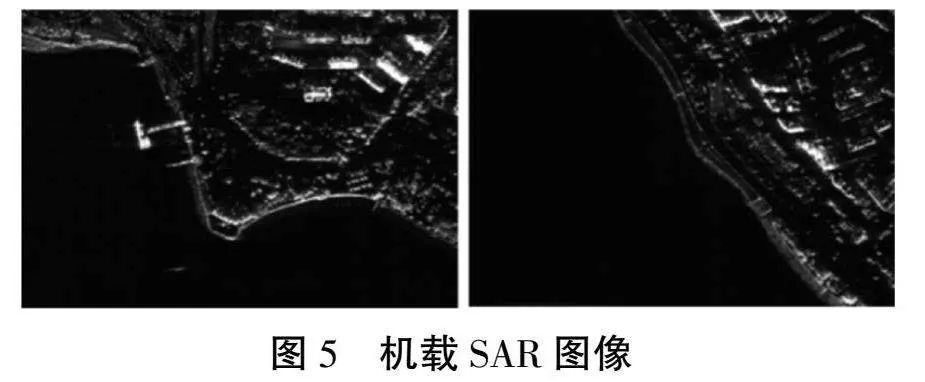
机载SAR图像。开展适应性试验所用的机载SAR图像来自中国空天信息创新研究院研制的机载SAR雷达获取的海陆局部SAR图像,如图5所示。
从图5中不难看出,由于机载SAR图像分辨率相对较好,在地物相对复杂的场景下,对于陆地区域,其图像灰度的分布与星载SAR图像相比更加不均匀,存在大量与海域灰级相类似的区域,在算法检测中极易被判别为海域,且检测结果中出现孔洞的问题也更加突出。
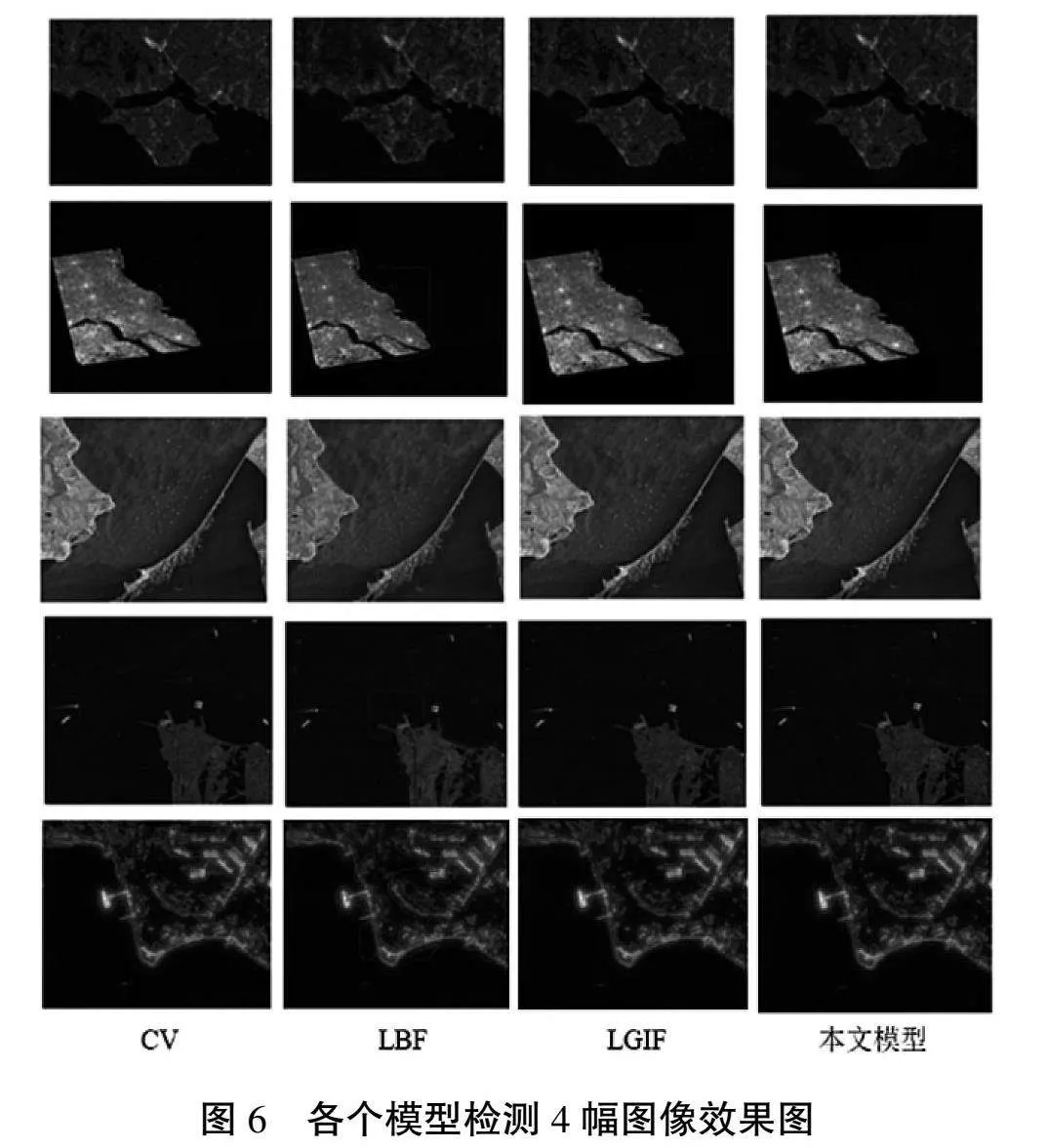
将图2—图5经过显著性检测后代入活动轮廓模型进行边缘检测,分别代入传统的CV模型、LBF模型、LGIF模型以及本文模型。将它们的结果进行对比(图6)。
初始轮廓默认为关于图中心的一个小矩形。由上述实验可以看出,传统的LBF模型不具备对于初始轮廓的鲁棒性。
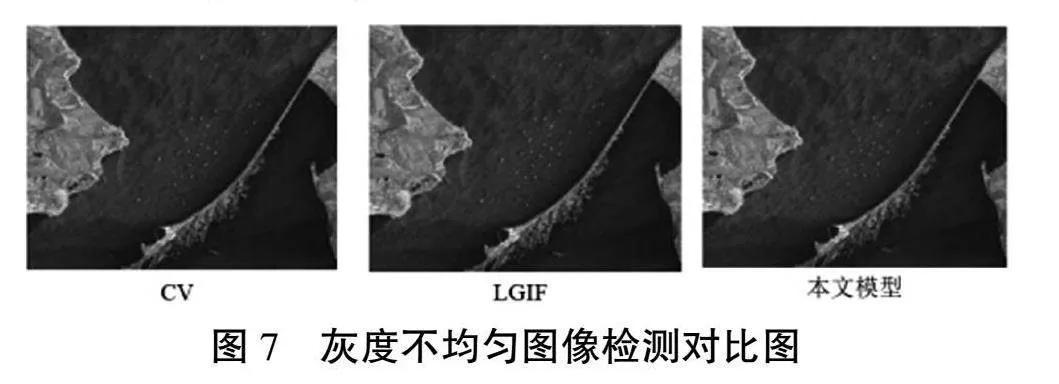
在分割灰度不均匀图像时,CV模型以及LGIF模型[10]不如本文模型分割的速度快,本文模型得到的分割图在海面上以及陆地上的孔洞少于CV模型以及LGIF模型的,并且本文模型比LGIF模型以及CV模型得到的边缘更加精确。
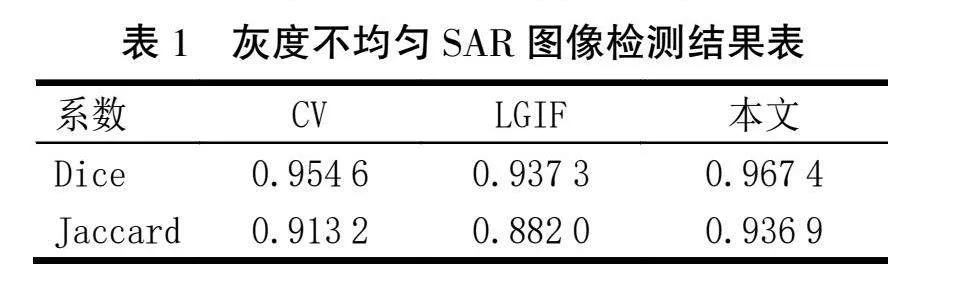
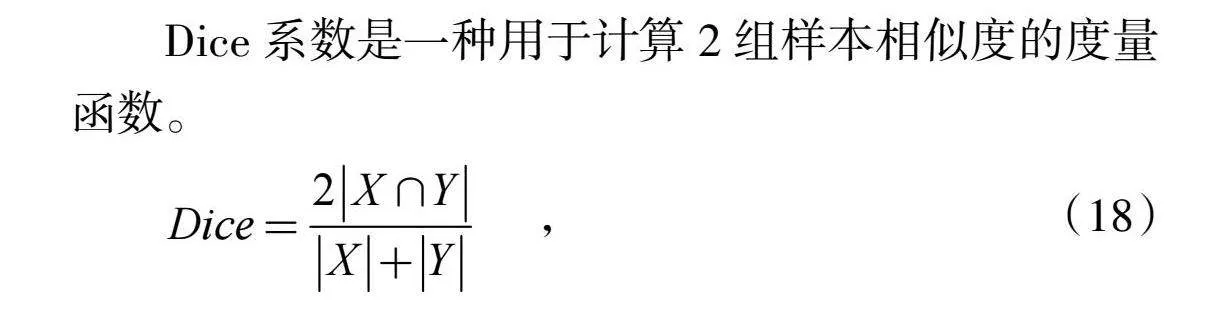
为了更加客观量化地评价实验结果,本文采用Dice系数[11]与Jaccard系数[12]对于上述实验结果进行定量分析。标准海岸线则由人工解译获得的标注海岸线,作为验证标准。
Dice系数是一种用于计算2组样本相似度的度量函数。
式中:|X∩Y|代表X与Y的交叉点,而|X|和|Y|则分别代表X与Y中元素的数量。在公式(18)中,分子的系数设定为2,这是因为分母需要重复计算X与Y中的相同元素。
Jaccard相似系数是用来衡量有限样本集之间的相似与差异程度的。Jaccard相似系数越大,样本间的相似度越高。
Dice系数和Jaccard相似系数越高,检测结果越接近标准海岸线,图像的岸线检测效果越好。
对于图7中的3个模型的检测图,将它们所检测出来的轮廓与标准人工解译出来的轮廓图进行相似度计算,可以得到表1。
从表1可以看出,本文模型检测结果最高,代表着检测出来的轮廓与人工解译的标准海岸线最相近。对于灰度不均匀SAR图像而言,本文模型的检测效果最好。
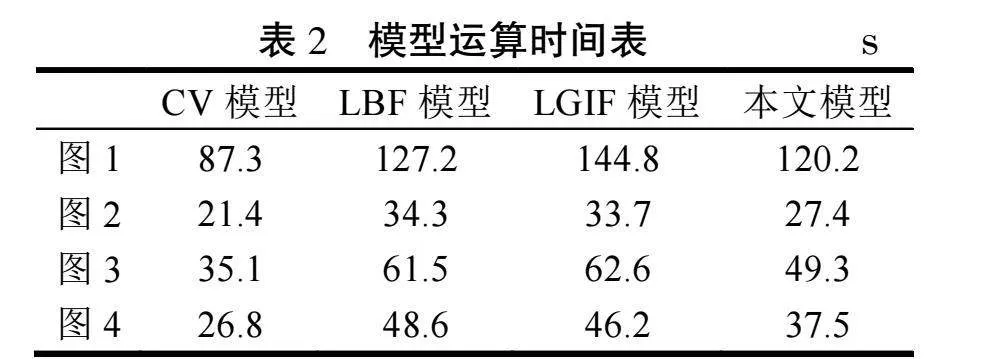
针对上述模型,测试它们的运算效率,让各个模型各自运算60次迭代,计算总时间,可以得到表2。
由表2可以看出本文模型的效率跟一般的混合活动轮廓模型LGIF模型相比,已经有很大的改善了,在CV模型与LBF模型效率之间,作为一个混合活动轮廓模型而言,这种效率是可以接受的范围。
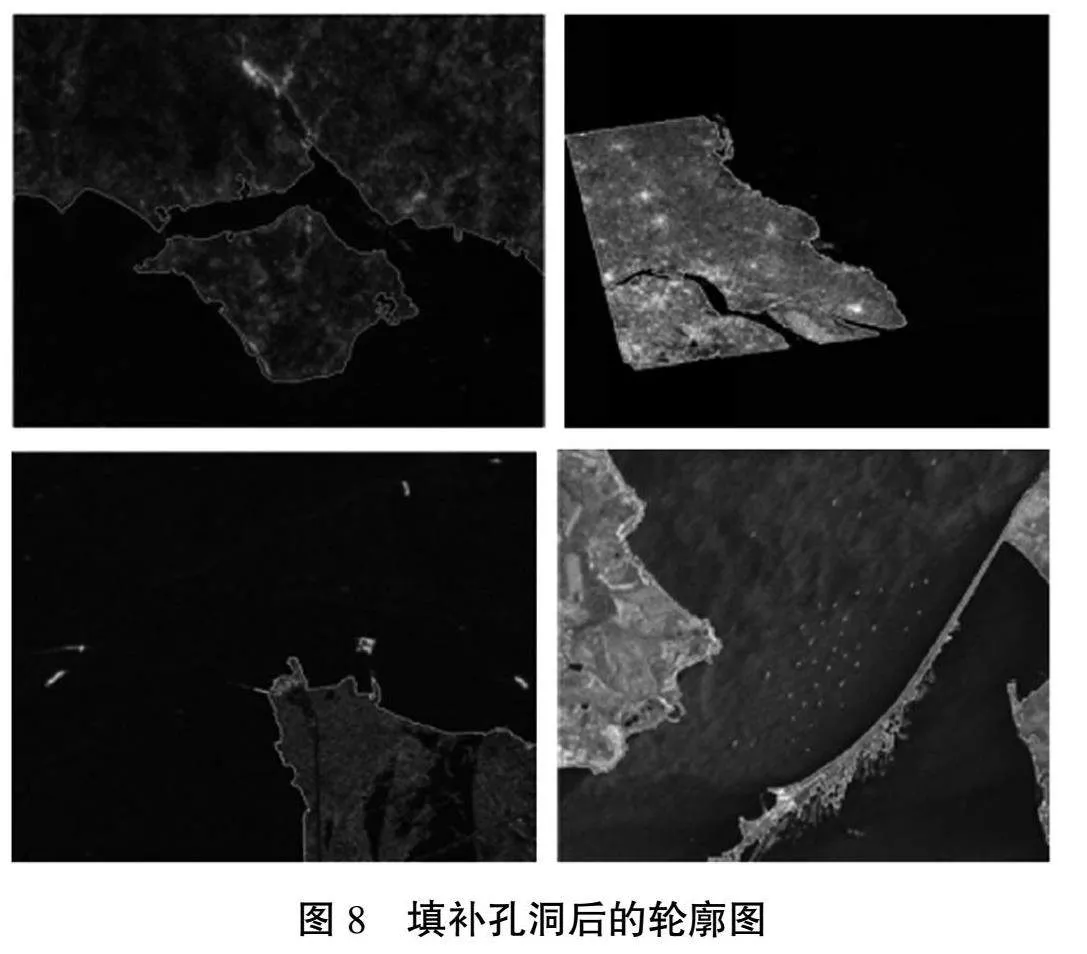
最后,再经过泛洪填充算法进行孔洞填补,去除误检、虚警,可以得到图8的检测结果。
如图8所示,在初步检测结果经过泛洪填充算法的处理后,基本上填补了陆地区域与海洋区域的大部分孔洞,去除了部分的虚警误检。将填补完整后的检测轮廓图与原始SAR图像进行比对,可以看出,得到的轮廓图十分接近于标准海岸线,进而验证了自适应活动轮廓模型对于SAR图像海岸线检测的能力,也进一步验证了自适应混合活动轮廓模型对于灰度不均匀图片的适应性,检测效果较好。
综上所述,通过改进CV模型以及将其与其他活动轮廓模型进行自适应结合的方法,让本文模型相比于传统活动轮廓模型,更加适应灰度不均匀SAR图像,使运算效率得到了进一步提升。
3 结论
针对SAR图像中灰度不均匀的问题,本文提出了一种基于改进CV模型的自适应混合活动轮廓模型。本文首先对于CV模型进行改进,主要是对其中的能量泛函公式进行变换,提升整体模型的运算效率。其次,再结合基于局部的几何活动轮廓模型LBF模型以及LIF模型的特征,用自适应系数进行结合,得出自适应混合活动轮廓模型。经过模型检测得到初步的轮廓图像,在此基础上,进行泛洪填充等步骤来填补孔洞、滤去虚警,得到完整轮廓图。
本文提出的这种基于改进CV模型的自适应混合活动轮廓模型,利用自适应系数连结改进CV模型和LIF模型,改善整体模型对于灰度不均匀SAR图像的检测效果,提升了模型的运算效率。
参考文献:
[1] 种劲松.合成孔径雷达图像舰船目标检测算法与应用研究[D].北京:中国科学院研究生院(电子学研究所),2002.
[2] HOU X, ZHANG L. Saliency detection: a spectral residual approach[C]. IEEE Conference on Computer Vision and Pattern Recognition(CVPR), Minneapolis, USA, 2007: 1-8.
[3] 裴季方.多视角SAR目标识别方法研究[D].成都:电子科技大学,2018.
[4] MICHAEL K, ANDREW W, DEMETRI T, et al. Snakes: Active contour models[J].International Journal of Computer Vision,1988.
[5] XU C, YEZZI J A, PRINCE J L. On the relationship between parametric and geometric active contours[C].Proc of the 34th Asilomar Conference on Signals,Systems and Computers, Pacific Grove,CA,USA,2000:483-489.
[6] CHAN T F, VESE L A. Active contours without edges[J]. IEEE Transactions on Image Processing,2001,10(2):266-277.
[7] 李俊,杨新,施鹏飞.基于Mumford-Shah模型的快速水平集图像分割方法[J].计算机学报,2002(11):1175-1183.
[8] LI C, KAO C Y, GORE J C, et al. Implicit active contours driven by local binary fitting energy[C]//IEEE International Conference on Computer Vision and Pattern Recognition,2007.
[9] ZHANG K H, ZHANG L, SONG H H, et al. Active contours with selective local or global segmentation: a new formulation and level set method[J].Image and Vision Computing,2010,28(4):668-676.
[10] WANG L, LI C, SUN Q, et al. Active contours driven by local and global intensity fitting energy withapplication to brain MR image segmentation[J].Computerized Medical Imaging & Graphics,2009,33(7):520-531.
[11] 张宇,刘雨东,计钊.向量相似度测度方法[J].声学技术,2009,28(4):532-536.
[12] 张晓琳,付英姿,褚培肖.杰卡德相似系数在推荐系统中的应用[J].计算机技术与发展,2015,25(4):158-161,165.
