基于线结构光的零件三维尺寸测量系统
2024-09-21郭建青石彧刘旭光
摘 要:针对原有接触式三维测量技术测量时间长、效率低、对零件有损伤等问题,提出一种基于线结构光的零件三维尺寸测量系统。建立光平面数学模型,采用基于平面靶标的自由移动标定法标定光平面,利用基于Hessian矩阵的Steger方法对线结构光中心提取,通过坐标变换得到零件的三维尺寸。在Visual Studio软件中的Winform窗体应用设计三维测量系统的软件交互界面,搭建实验测量平台进行多个零件的测量实验。实验结果表明,对不同零件三维尺寸测量相误差均小于4%,提出的测量系统及方法具有较高的精度和稳定性,能够满足工程应用。
关键词:线结构光;三维测量;光条中心提取;光平面标定:三维尺寸测量系统
中图分类号:TP391.4 文献标志码:A 文章编号:2095-2945(2024)27-0045-04
Abstract: In order to solve the problems of the original contact three-dimensional measurement technology, such as long measuring time, low efficiency and damage to parts, a three-dimensional measurement system of parts based on line structured light is proposed. The mathematical model of the light plane is established, and the free movement calibration method based on the plane target is used to calibrate the light plane. The Steger method based on Hessian matrix is used to extract the center of the line structured light, and the three-dimensional dimension of the part is obtained by coordinate transformation. The software interface of the three-dimensional measurement system is designed by the Winform form application in the Visual Studio software, and the experimental measurement platform is built to carry out the measurement experiments of many parts. The experimental results show that the phase errors of three-dimensional measurement of different parts are less than 4%. The proposed measurement system and method have high accuracy and stability and can meet engineering applications.
Keywords: line structured light; three-dimensional measurement; stripe center extraction; optical plane calibration; three-dimensinal measurement system
随着现代科学技术和信息技术的高速发展,传统接触式三维测量技术的缺陷日益显露,已经不能适应目前发展中高效、全面的要求。随着各种光学非接触式三维测量技术的应用发展,基于线结构光的三维测量技术受到关注,它具有成本低、激光图像易于提取、测量的信息量大、测量精度较高和富有实时性等特点,在测量中得到了广泛应用。线结构光视觉传感器主要由相机和线激光投射器构成,根据相机和激光器之间的相对位置关系,由激光三角法原理获取被测工件的三维形面信息。
结构光视觉测量技术[1]的基本思想是利用照明中的几何信息来帮助提取物体的几何信息。根据测量方法和测量对象的不同,可以设计出不同的结构光。目前基于结构光测量的方法有很多,按照激光器投射出条纹形状的不同可以分为点结构光[2]法、线结构光[3]法、编码结构光[4]法等,本研究采用线结构光的测量技术,完成了对零件三维尺寸的测量。实验结果表明,提出的测量系统及方法具有较高的精度和稳定性,可以满足工业检测的精度要求。
1 零件三维尺寸测量系统构建
以如图1所示的零件为测量对象,测量目标为零件的梯度三维尺寸。
基于激光三角法的原理搭建如图2所示的视觉测量系统,系统中相机竖直、激光器倾斜布置,利用坐标系转换提取激光器投射在零件表面上每段条纹在相机坐标系下的3D坐标,其坐标的Z轴数值的差值就代表零件的梯度。
相机选用500万像素的CMOS相机和焦距为12 mm的镜头[5],其型号为MER-500-14GC,具有高分辨率、高清晰度、低噪声、安装和使用方便等特点,能够满足当前实验的环境。为最小化干扰,选择具有高亮度和细光线特征、波长为650 nm的红色激光器,其型号为LC650-16-3-F。
2 零件三维尺寸测量算法
2.1 光平面数学模型
基于线结构光的零件三维尺寸测量系统通过相机和线结构光的配合可以完成零件三维测量,在三维测量中首先建立光平面数学模型,进行光平面标定,再对激光条中心进行提取,最后由坐标转换输出零件的梯度。
线结构光感器的激光器在空间上形成一个光平面,该平面投射到相机视场中从而与相机建立图像几何的相对关系,其空间结构关系的数学模型如图3所示。
在线激光的平面上以Os作为光平面坐标系的原点,建立激光平面坐标系Os-XsYsZs作为参考,在图3中可以看出Os-XsYs平面即为激光所在的平面,Zs轴垂直于光平面向上,则可以设光平面方程用如下公式表示
z=ax+by+c , (1)
式中:a、b和c是结构光平面方程的3个参数。
根据数学模型,将相机坐标系下的三维坐标(xc,yc,zc)转换为图像平面坐标系下的二维坐标,再由三角形相似原理可得
转换成矩阵形式为
zc xy1=f 0 0 00 f 0 00 0 1 0xcyczc1 。 (3)
由公式(1)(3)可以得到相机坐标系中任一点的3D坐标
zc=cfx fy /(fx fy-a fy(u-u0)-b fx(v-v0))xc=zc(u-u0)/fxyc=zc(v-v0)/fy 。 (4)
2.2 光平面标定
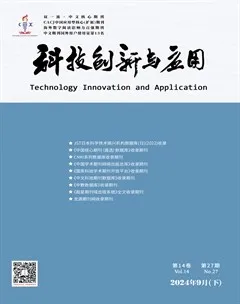
采用基于平面靶标的自由移动标定法,首先通过图像处理和计算提取光条中心的像素坐标,再经过一系列的投影矩阵坐标变换后,获得光条中心上每个像素坐标所对应的世界坐标,进而构造方程组,并求得光平面方程的系数a、b、c。采集到的光平面标定图像如图4所示。
光平面标定所获得的光平面参数见表1。
2.3 基于Hessian矩阵的Steger方法
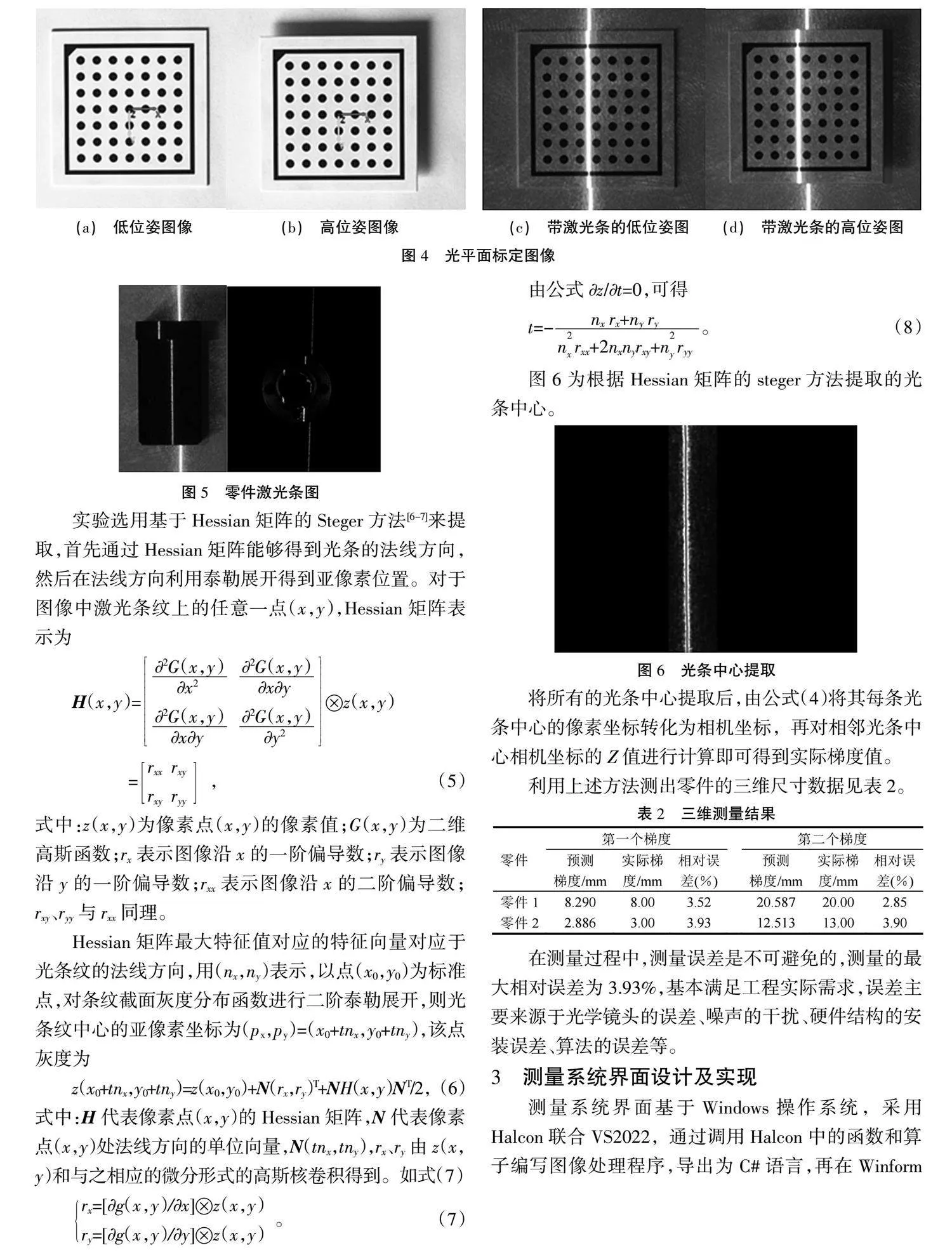
在完成相机标定、光平面的标定后,则需要提取激光条的中心坐标。采取如图5所示的激光条来进行激光条中心坐标提取。
实验选用基于Hessian矩阵的Steger方法[6-7]来提取,首先通过Hessian矩阵能够得到光条的法线方向,然后在法线方向利用泰勒展开得到亚像素位置。对于图像中激光条纹上的任意一点(x,y),Hessian矩阵表示为
将所有的光条中心提取后,由公式(4)将其每条光条中心的像素坐标转化为相机坐标,再对相邻光条中心相机坐标的Z值进行计算即可得到实际梯度值。
利用上述方法测出零件的三维尺寸数据见表2。
在测量过程中,测量误差是不可避免的,测量的最大相对误差为3.93%,基本满足工程实际需求,误差主要来源于光学镜头的误差、噪声的干扰、硬件结构的安装误差、算法的误差等。
3 测量系统界面设计及实现
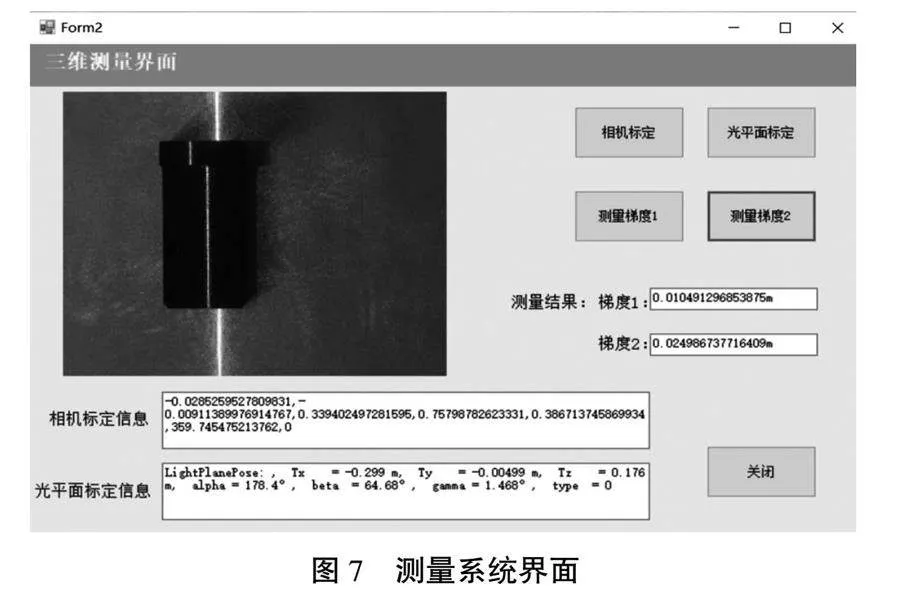
测量系统界面基于Windows操作系统,采用Halcon联合VS2022,通过调用Halcon中的函数和算子编写图像处理程序,导出为C#语言,再在Winform
窗体应用中设计系统界面。涉及到的功能包括图像采集、相机标定、光平面标定、三维测量各方面,因此,设计的界面需要将其各功能封装到相应模块,具体的系统界面如图7所示,各个模块内封装好需要用到的图像处理算法,即点击该按钮,就会实现相应的功能。
4 结论
基于机器视觉和线结构光测量技术,提出了一种零件三维尺寸测量系统,采用激光三角法原理搭建了高分辨率视觉测量系统平台。基于平面靶标的自由移动标定法标定光平面,利用基于Hessian矩阵的Steger方法对线结构光中心进行提取,得到零件三维尺寸;最后在Visual Studio软件中的Winform窗体应用设计了三维测量系统的软件交互界面,完成了对零件的三维尺寸测量实验。实验结果表明,提出的测量系统及方法具有较高的精度和稳定性,满足工程实际需求。
参考文献:
[1] 李宏伟.结构光三维视觉检测关键技术研究[D].哈尔滨:哈尔滨工程大学,2006.
[2] 王岩.基于结构光的三维测量及重建技术[J].计算机应用,1999,17(6):35-41.
[3] 彭谦之,杨雪荣,成思源,等.基于单应性矩阵的线结构光测量快速标定方法研究[J].机电工程,2019,36(6):613-617.
[4] 李粉兰.基于颜色编码的三维测量系统的研究[D].哈尔滨:哈尔滨理工大学,2003.
[5] 张永恒.基于机器视觉的CMOS图像传感器表面缺陷检测研究[D].哈尔滨:哈尔滨工业大学,2020.
[6] 李栋梁,唐阳山,黄贤成,等.基于Hessian矩阵的线结构光中心线提取方法研究[J].汽车实用技术,2017(22):37-39.
[7] 吴玉波,陈迪来,杨超,等.基于Steger算法的多线结构光中心提取[J].应用激光,2023,43(10):188-195.