基于改进鲸鱼优化算法的永磁同步电机控制策略
2024-09-19陈德海陈志李志远张吉祥





摘 要:永磁同步电机(Permanent Magnet Synchronous Motor,PMSM) 调速系统中普遍存在转速超调不稳定和受负载干扰大等现象,对此提出一种改进鲸鱼优化算法(Improved Whale Optimization Algorithm,IWOA) 对转速环的传统PI 控制参数整定进行优化。在鲸鱼算法(Whale Algorithm,WOA) 的基础上引入非线性惯性权重来平衡算法的局部和全局搜索能力。依据学习策略的思想,对鲸鱼种群中每个个体的位置进行优化。在Matlab / Simulink 上搭建电机调速系统仿真模型并进行仿真实验,仿真结果表明,基于IWOA 的控制策略相比于传统WOA 控制超调率由3% 减少到1. 5% ,而PI 控制超调率为5% ,进一步增强了系统抗负载扰动能力,显著地提高了PMSM 的各方面性能。
关键词:永磁同步电机;改进鲸鱼优化算法;非线性惯性权重;学习策略
中图分类号:TM351 文献标志码:A 开放科学(资源服务)标识码(OSID):
文章编号:1003-3106(2024)06-1529-07
0 引言
永磁同步电机(Permanent Magnet SynchronousMotor,PMSM)目前在风力发电机、人工智能和电动汽车等控制系统中有普遍应用[1-3]。其中比例积分(Proportion Integral,PI)控制由于拥有简便等优点,在PMSM 系统中使用较多,且在一定范围内可以达到控制要求,但当PMSM 内部参数不稳定时,难以达到预期精准的调速控制[4]。因此,很多研究者对PI 控制也提出了各种优化方法,文献[5]使用模糊算法对PI 的参数进行在线整定,以提高系统的精度。但要使结果更加精确就要增加模糊规则,从而速度将变慢。文献[6]提出了一种通过遗传算法来整定PI 参数的方法,其操作方便、速度较快,但在遗传算法的寻最优解过程中,产生的每代个体解具有随机性,可能无法得到最优解。文献[7]利用鲸鱼算法(Whale Algorithm,WOA)对向量机进行模型预测,将WOA 分别与粒子群算法、布谷鸟算法的预测能力进行了实验参照分析,结果表明了WOA 具有更高的收敛精度和更快的收敛速度。可以得知用WOA 来整定电机PI 参数也是一种不错的策略,但是传统的WOA 容易陷入局部最优而不是全局最优的误区,所以需对此进行改进。文献[8]提出了一种教学优化算法,是一种新型的群体智能优化算法。该算法通过模拟实际的师生授课过程中的“教学”和“学习”2 个过程来实现问题的优化。文献[9]提出了一种利用基于对立搜索来初始化WOA 中种群的优化方法,通过优势个体反向学习增加种群多样性,对WOA 的收敛精度与收敛速度有一定程度的改进。文献[10]利用WOA 对气体绝缘输电线路(Gas-Insulated Transmission Line,GIL)壳体放电性能进行预测,使其相比于传统的极限学习机(Extreme Learning Machine,ELM)预测方法更加精准。
本文在传统WOA 的基础上引入了2 种非线性惯性权重,并根据教—学算法[11]的思路对其进行了改进,提出了改进鲸鱼优化算法(Improved WhaleOptimization Algorithm,IWOA),并在转速环控制部分设计了IWOA-PI 控制器,使得PI 参数的整定有更高的收敛精度与收敛速度。在Matlab / Simulink上搭建电机调速系统各模块的仿真模型,并与传统PI、传统WOA 优化PI2 种控制方法进行仿真对比以验证本文方法的优越性。
1 PMSM 数学模型
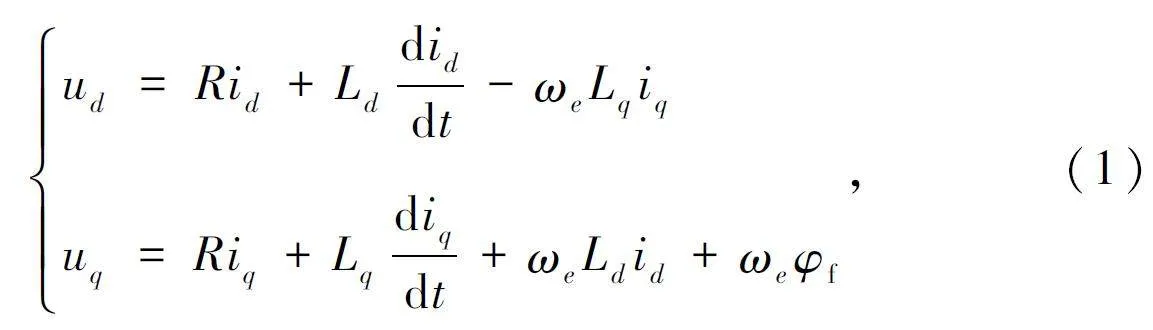
本文假定所讨论的PMSM 为理想电机,即不考虑铁磁饱和、定子和转子齿槽效应的影响[12]。在d、q 轴坐标系上建立PMSM 的数学模型,定子电压方程为:
式中:ud、uq 为定子电压在d、q 轴的分量,id、iq 为定子电流在d、q 轴的分量,Ld、Lq 为定子绕组的直、交轴电感,R 为相电阻,ωe 为电角速度;φf 为磁链。
转矩数学方程为:
式中:TL 为负载转矩,B 为阻尼系数,ωr 为机械角速度,J 为转动惯量。
2 IWOA
2. 1 基本WOA
WOA 是由澳大利亚学者Mirjalili 等[13]在2016 年根据鲸鱼群的捕食行为提出的仿生算法[14-15]。该算法是一种模拟座头鲸狩猎行为的元启发式优化算法,通过随机或最佳搜索的方式进行模仿捕猎过程,并使用螺旋的方式模仿鲸鱼的泡泡网捕食模式[16-17]。该算法具有机制简单、参数少、寻优能力强等优点。鲸鱼在全局范围中的最优狩猎点即为所求目标函数的最优解,下面为鲸鱼算法的机制原理介绍。
(1)包围猎物
因为鲸鱼的狩猎范围是全局解的空间,因此必须先知道猎物的坐标然后再进行围捕。但是最优位置一开始是不知道的,因此WOA 假设当前的最佳候选解是为目标猎物即最优解。进行这个假设后,其他的搜索方向都向着这个最优解前进。这一行为由式(4)和式(5)表示:
D =| C·X*(t)- X(t)| , (4)
X(t + 1) = X*(t)- A·D, (5)
式中:t 为当前迭代次数,X 为到目前为止最优解,X为当前解,A、C 为矩阵系数。
A = 2a·r - a, (6)
C = 2r, (7)
式中:r 为[0,1]的随机数,a 定义为收敛因子,从2 线性衰减到0,与迭代次数t 线性相关。
a = 2 - 2t / tmax , (8)
式中:tmax 代表整个捕食过程中的最大迭代次数。
(2)起泡网捕食(局部搜索)
这一搜索阶段为,鲸鱼看见目标猎物后,立刻计算与目标猎物的距离,然后通过螺旋式的轨迹向着猎物前进,相关数学模型公式如下:
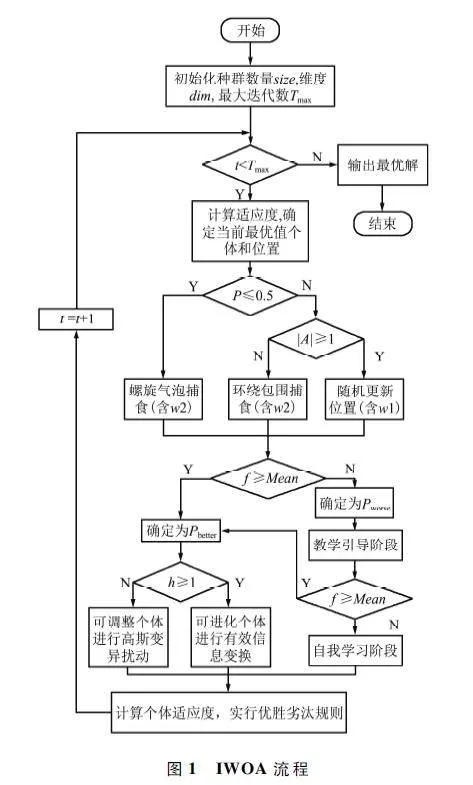
本文对WOA 进行了改进,即非线性惯性权重的引入和加入学习策略的思想,从而得到IWOA,流程如图1 所示。
3 仿真实验与结果分析
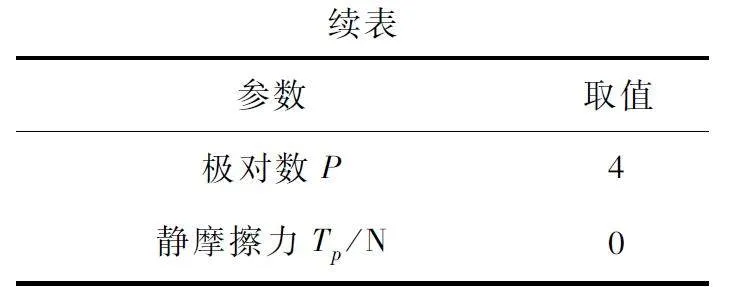
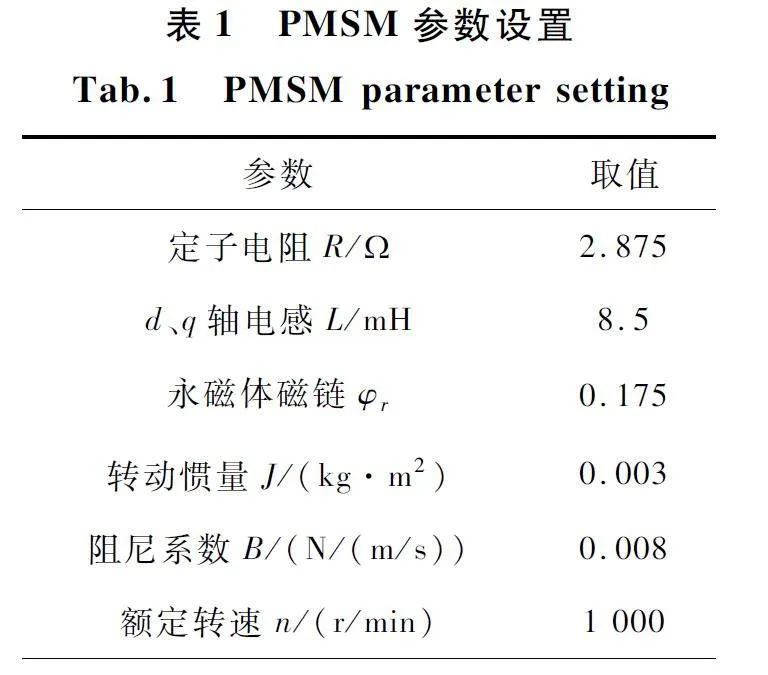
为了验证所设计控制策略的有效性,在Matlab /Simulink 软件上进行了模拟实验。PMSM 参数设置如表1 所示。
PI 控制算法中初始参数设置:转速环中Kp =0. 3,Ki = 20;电流环中Kp = 0. 3,Ki = 50,此时比例积分微分(Proportion Integral Derivative,PID)控制器控制桨距角震荡较小,效果为PID 控制中最好。在鲸鱼优化算法中取不同迭代次数和种群数量,通过多次测试,并进行数据分析,取IWOA 中最大迭代次数Tmax = 2 000,种群规模size = 100,惯性权重最大值λmax = 0. 8,惯性权重最小值λmin = 0. 3。PI 参数整定的目标函数取为由PI 参数决定的电机转速偏差绝对值与时间乘积积分,公式为:
为便于应用Matlab 软件近似计算值,可选定一个足够大的仿真时间,将连续时间按相等的极短时间Δt 离散为m 份[18],则目标函数近似等于:
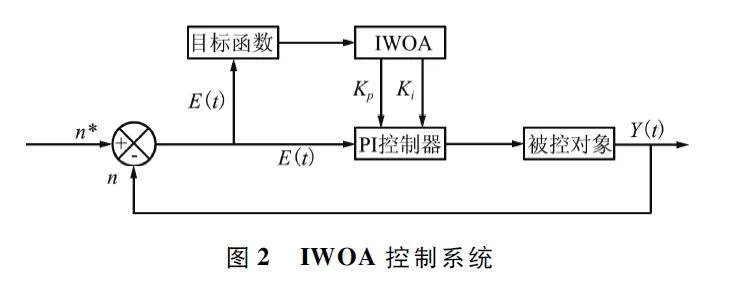
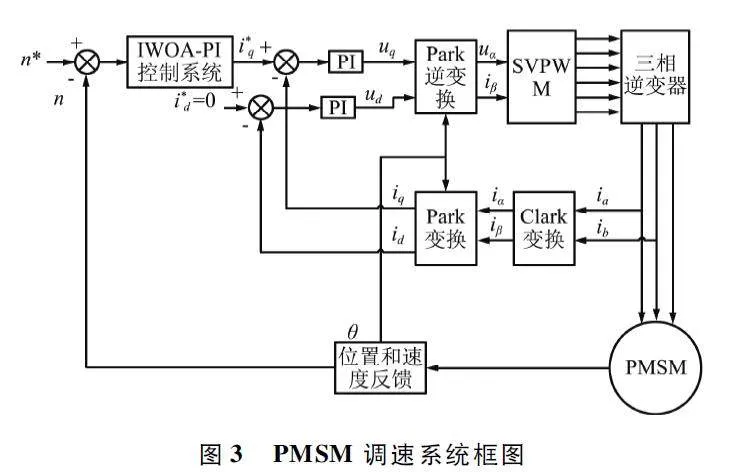
IWOA 在PMSM 中的控制系统如图2 所示,基于IWOA 的PMSM 调速系统框图如图3 所示。
图4(a)~ 图4 (c)为PI、传统WOA 优化PI(WOA-PI)、IWOA 优化PI(IWOA-PI)三种控制下的电机转速变化对比。由图4 可知,在控制系统启动阶段时,在PI 控制下转速的超调率约5% ,WOA-PI 控制产生的超调率约3% ,而IWOA-PI 控制超调率约1. 5% ,到达稳定的时间也远小于前二者控制;在0. 3 s 突加5 N·m 的负载和0. 6 s 突卸负载时,IWOA-PI 控制几乎无超调,表现最好,而WOA-PI 控制有小部分超调,表现次之,PI 控制超调最大,表现最差。
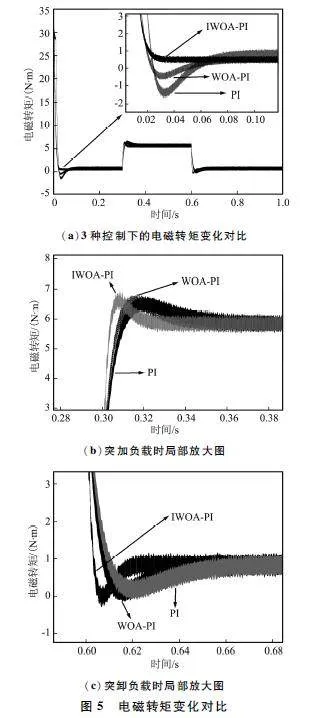
图5(a)~ 图5(c)为3 种控制下的电磁转矩变化对比图。由图5 可知,系统刚启动时,IWOA-PI 控制几乎无超调且最快稳定下来,WOA-PI 控制次之,而PI 控制超调最大且稳定时间最长。在0. 3 s 突加0. 5 N·m 的负载和0. 6 s 突卸负载时,IWOA-PI 控制响应速度最快且到达稳定时间最短,WOA-PI 控制次之,PI 响应速度最慢且到达稳定时间最长。
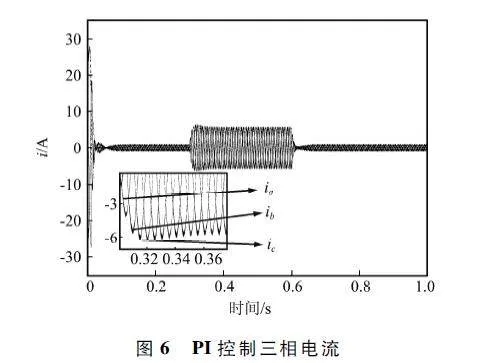
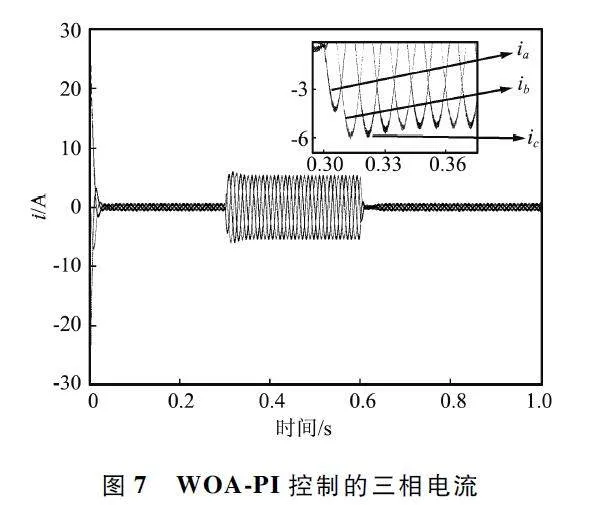
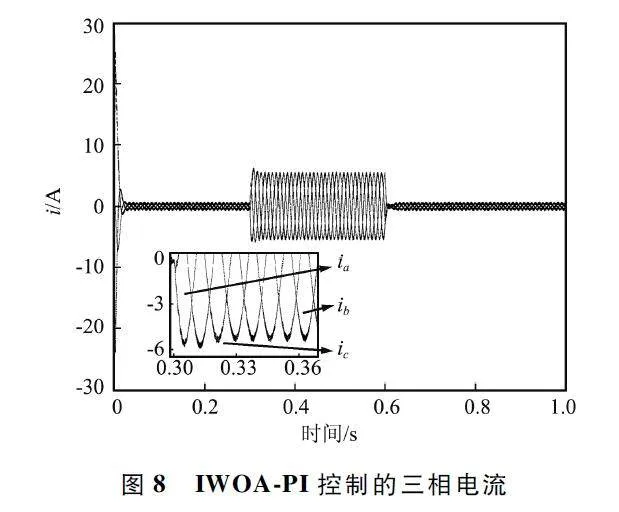
图6 ~ 图8 分别为3 种控制下的三相电流变化图。可以看出,在系统刚启动并且电流趋于稳定这一过程中,PI 控制响应速度最慢,稳定时间最长;WOA-PI 控制与IWOA-PI 控制响应速度接近,稳定时间都较快。在0. 3 s 突加负载后趋于稳定过程中,PI 控制电流变化幅度较大,在0. 35 s 处稳定下来;WOA-PI 控制流变化幅度稍大,在0. 34 s 处稳定下来;IWOA-PI 控制电流变化幅度较小,在0. 32 s稳定下来,效果表现为三者中最好。
4 结束语
针对PMSM 系统中转速超调与负载扰动等问题,本文引入非线性惯性权重和学习策略思想,设计了IWOA-PI 控制器,搭建了PMSM 调速系统的Sim-ulink 仿真模型,并且与WOA-PI 控制和传统PI 控制进行仿真实验对比。结果表明,本文所设计的控制器在系统响应速度、全局鲁棒性和抗干扰能力等方面均比另外2 种方法效果更优,进一步改善了电机的性能,为PMSM 的实际应用提供了一种可行的优化控制策略。
参考文献
[1] 郑长明,董萱萱,肖子语,等. 基于虚拟电阻有源阻尼的LC 滤波型永磁同步电机系统预测电流控制[J /OL]. 电工技术学报:1-11[2023-08-10]. https:∥doi.org / 10. 19595 / j. cnki. 1000-6753. tces. 230582.
[2] 王致诚,孟建军. 基于高阶滑模方法的永磁同步电机控制系统研究[J]. 制造业自动化,2021,43(1):8-11.
[3] CHOO K M,WON C Y. Design and Analysis of ElectricalBraking Torque Limit Trajectory for Regenerative Brakingin Electric Vehicles with PMSM Drive Systems[J]. IEEETransactions on Power Electronics,2020,35 (12 ):13308-13321.
[4] 袁雷,胡冰新,魏克银,等. 现代永磁同步电机控制原理及MATLAB 仿真[M ]. 北京:北京航空航天大学,2016.
[5] 陈昱昊,郑宾. 基于模糊PI 控制的永磁同步电机矢量控制性能研究[J]. 国外电子测量技术,2022,41(7):75-81.
[6] 李浩,蒋雪峰,黄文新. 基于遗传算法的永磁同步电动机PI 参数自整定[J]. 微特电机,2015,43(1):58-61.
[7] 范强飞,廖爱华,丁亚琦. 基于WOA-RVM 的滚动轴承退化趋势预测[J]. 组合机床与自动化加工技术,2019(11):58-61.
[8] RAO R V,SAVSANI V J,VAKHARIA D P. Teachinglearningbased Optimization:An Optimization Method forContinuous Nonlinear Large Scale Problems[J]. Information Sciences,2012,183(1):1-15.
[9] 许瑜飞,钱锋,杨明磊,等. 改进鲸鱼优化算法及其在渣油加氢参数优化的应用[J]. 化工学报,2018,69(3):891-899.
[10] 王立宪,马宏忠,戴锋. 基于机电联合的GIL 局部放电趋势预测研究[J]. 电子测量与仪器学报,2021,35(10):98-106.
[11] 王永琦,吴飞,江潇潇,等. 求解并行机拖期与能耗成本优化调度的混合教—学算法[J]. 计算机应用研究,2019,36(3):673-676.
[12] 郭鹏. 模糊前馈与模糊PID 结合的风力发电机组变桨距控制[J]. 中国电机工程学报,2010,30(8):123-128.
[13] MIRJALILI S,LEWIS A. The Whale Optimization Algorithm[J]. Advances in Engineering Software,2016,95:51-67.
[14] 单文童,栾晓明. 基于鲸鱼优化算法的失配滤波器设计[J]. 无线电工程,2021,51(6):453-457.
[15] 马乐,邢丹. 基于鲸鱼优化算法的智能除尘监控系统研究[J]. 工业控制计算机,2023,36(4):49-50.
[16] 孟建军,江相君,李德仓,等. 基于VMD-LSTM-WOA 的铁路沿线风速预测模型[J]. 传感器与微系统,2023,42(4):152-156.
[17] 黄辉先,张广炎,陈思溢,等. 基于混沌权重和精英引导的鲸鱼优化算法[J]. 传感器与微系统,2020,39(5):113-116.
[18] 商建平,俞树荣. 基于改进人工蜂群算法的PID 参数整定研究[J]. 自动化与仪器仪表,2015(11):166-167.
作者简介
陈德海 男,(1978—),博士,副教授,硕士生导师。主要研究方向:电机控制。
陈志文 男,(1999—),硕士研究生。主要研究方向:电机控制。
李志远 男,(1997—),硕士研究生。主要研究方向:电机本体。
张吉祥 男,(2000—),硕士研究生。主要研究方向:电机控制。
基金项目:国家自然科学基金(52067008)
