口岸城市末端无人机精准配送与投递模型
2024-09-19杨晓姚敏







摘 要:针对物流无人机尚未建立根据应用场景差异开展特性研究的问题,提出一种应用于西南口岸城市末端,即丘陵、山地地形下城郊与乡村地区物流无人机系统。基于物流配送需求,提出一种“路径规划+图像配准投递” 的双目标模型。利用A* 算法与地面危险区域分类,采用一种保证飞行安全的“跳跃式” 路径规划策略;利用“模板+SURF” 算法开展主动判断,快速定位卸货点并完成卸货。基于实际场景的验证性试验,建立的路径规划模型在避让山火隐患区域的前提下,较人工配送效率提高50% 以上;所建立图像配准模型在耗费14% 机载电源的条件下可实现88% 的配准准确率,相比传统SIFT 算法耗电量增加7% 、准确率提高57% ;相比Desnet 算法耗电量降低18% 、准确率降低7% 。所设计系统在丘陵与山区区域,以及房屋相似度高的区域可大大提高物流无人机的配送与投递准确度。
关键词:口岸城市末端;物流无人机;“跳跃式” 路径规划;图像配准
中图分类号:TP391 文献标志码:A 开放科学(资源服务)标识码(OSID):
文章编号:1003-3106(2024)06-1569-07
0 引言
针对不同领域的独特应用场景及需求,无人机在多领域均已经取得了显著发展。在城市区域的物流方面,提供“最后一公里”配送服务的物流无人机因不受限于地面交通,表现出明显的高效、迅捷等特征。
随着物流企业逐步建立起空中配送网络,相关研究在现实需求下得到了越来越多的关注。Dorling等[1]推导了多旋翼无人机的能耗模型,证明了能耗随负载和电池质量的变化基本呈现出线性关系。张启钱等[2]以路径长度、能耗以及避障的综合成本最低为研究对象,建立起基于A* 的低空无人机路由快速搜索模型。考虑到续航有限的问题,周浪[3]建立了遗传算法推导的“车+无人机”协同路径优化模型。郭兴海等[4]对无人机执行配送任务过程中的任务分配、路径规划均开展过程中调整,建立起以路径长度、地形、雷达威胁和无人机碰撞为综合成本的最优规划。Torabbeigi 等[5]通过变预处理对最小集覆盖路径模型进行快速解模。
尽管已经建立了一定的研究基础,物流无人机仍难以充分满足实际应用的需要[6-7],缺乏针对特定配送场景的差异化设计是导致这一现象的重要原因之一。随着西南地区口岸城市建设及其末端在国、内外贸易交流中地位与职能的明显提升,其所承担的高价值时效商品进、出口对于Production toConsumer (P2C)“最后一公里”配送有着越发强烈的高效需求。物流无人机恰适应这类人口“小聚集、大分散”的特征,配送路径存在大量包含丘陵、山地地形,地面树木、灌木繁茂,地面障碍复杂的配送环境。
路径规划是实现物流无人机依据环境主动调整的重要前提。已有的物流无人机配送路线规划模型主要遵行2 类基本模式:① 起自配送点、止于目的地的直线配送;② 基于导航地图的既有道路路线规划[8-10]。已有的路径规划研究往往据上述模式进行深化与优化,在实际操作过程中,模式①配送距离近、线路规划简单,但存在无人机失联风险,若发生于山区范围,不仅搜寻成本高,也存在引发山火等隐患。模式②安全性高、规划成本低,但是在盘山、绕行路的场景下,无人机立体配送、不受地形限制的优势将被大幅削减,配送效率低。此外,部分目的地所在位置沿未被标识的乡间道路分布,可能导致无法利用导航地图规划路径,使得无人机飞行路径规划失效,配送任务无法完成。基于上述思路,主动路径规划优化主要可分为以A* 算法为代表的传统路径规划、以概率地图法(Probabilistic Roadmap Method,PRM)为代表的采样路径规划、以蚁群算法为代表的智能仿生路径规划[11-13]。无人机配送过程需兼顾起飞质量与飞行效率,采用现场采集、处理并规划的边缘处理对机身能耗管理、搜索效率要求较高,实际应用效果较差。
基于规划路径飞抵目的地,即西南地区的城郊、乡村等区域后,无人机面临当地“庭院+楼栋”分布紧凑、结构与外形类同度均较高,导致准确投递较为困难。通过无人机携带微型相机对目的地楼顶进行图像匹配识别,可明显提高配送卸货准确率。当前,图像匹配研究领域已经积累了较多的研究成果,主要包括以模板匹配为代表的模式识别、SURF 等为代表的特征识别[14-15]、以Desnet 网络为代表的人工智能识别[16-18]。模板匹配实现简单、计算代价小,但只能实现平移匹配,若原图像中的匹配目标发生旋转或大小变化,则匹配难以实现。Desnet 网络通过特征重用和旁路(Bypass)设置,在减少参数量的同时缓解梯度消失、模型退化问题,使得目标图像形变后仍可保持较高的识别准确率,但是人工智能算法需要样本进行训练,对处理器要求较高,难以满足物流无人机的能耗管控,故在实用阶段中仍然存在一定的问题。由于无人机配送的应用场景中,自不同视角、距离和环境进行目的地匹配的可能性都极大,故需要采取一种鲁棒性强、准确率高,可适应不同条件的图像匹配算法。
针对以路径规划中存在的问题,结合2 类路径规划的特点,采用总体遵循既有道路、局部忽略沿途障碍的方式,通过“跳点”合理避让部分地面障碍,采用改进A* 算法开展飞行线路路径规划,可兼顾配送的安全与效率。同时,利用无人机视觉,采用“模板+SURF”图像配准算法,可以实现准确定位卸货位置,增强无人机下降过程的飞行状态稳定与安全。对比人工配送与直线飞行路径规划,本文所采用A* 算法通过判断危险区域实现了“跳点”规划,较人工配送效率提高50% 以上的同时实现100% 安全飞行;相较传统特征识别以及人工智能识别算法,本文所采用“模板+SURF”算法兼顾了运算功耗与准确度,在运算功耗比人工智能算法降低5% ~18% 的条件下,准确率达到88% ;尽管功耗相比传统SURF 与SIFT 算法高,但准确率同样得到长足提高。上述实际场景试验验证了本文所提出算法的在特定场景下(西南地区口岸末端城郊、乡村)的有效性与实用性。
1 口岸末端无人机配送模型
1. 1 场景描述与相关设定
某边境口岸城市下辖农村物流配送中心利用无人机搭载货物进行“最后一公里”运输,货物运输采用四旋翼无人机,无人机携带可充电锂电池,货物送达后需返回配送中心。货物无人机的配送高程设定于非管制高程以保证配送的即时性与灵活性,同时无人机需通过识别地面障碍物及高程保证飞行安全。
本模型的主要架设包括:① 配送中心位置固定,配送目的地位置已知,且由收货人提供收货地点根据模板拍摄的场景照片;② 无人机实行点对点的配送方式;③ 无人机飞行高度设置为距离地面30 m净高,随地面高程变化及避让障碍物而对应调整飞行高度;④ 无人机于满电状态下起飞出发,飞行状态参数从起飞始设定数值范围,途中飞行状态禁止超出设定值,途中飞行任务不变更。实验采用的无人机如图1 所示。
1. 2 局部跳跃式路径规划模型
本文改进A* 算法示意如图2 所示。l1 与l2 之间不存在树林、草场等障碍物,无人机可以实现P0到P5 位置点的跳跃,在保证安全的前提下,大幅度提高配送效率;而l2 与l3 之间存在树林、草场等障碍物,无人机只能沿公路进行配送,以保证配送的安全性。为了兼顾飞行的安全性和经济性,无人机与地面的相对飞行高度固定在30 m。标准的A* 算法以起始位置向目标进行搜寻,从而获得最小估价航迹,估价函数f(n)如下:
f(n) = g(n)+ h(n), (1)
h(n) = (xn - xg )+ (yn - yg ), (2)
式中:g(n)、h(n)分别为起始位置到当前位置的实际代价、当前位置到目标位置的预估代价,xn、yn 分别为当前位置横、纵坐标,xg、yg 分别为目标位置横、纵坐标。
为此,本文以公路为安全约束,直线为效率约束对A* 算法进行改进。如图2(a)所示,设位置P′1 为跳点,跳点间的树林、草场障碍物长度为Sobst,跳点间的可通过长度为Stunle。建立当前位置及其邻近位置矩阵P 如下:
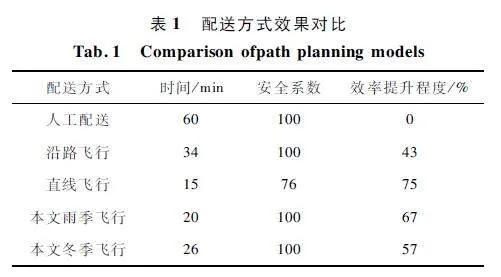
常规无人机配送路径如图5 所示,临沧市红糖村作为最末端分支快递服务站,服务范围包含周家村、范家村等10 个乡村的快递业务。其中,快递由红塘村配送至周家,配送路程约8. 5 km、配送时间约60 min,效率严重低下。图5(a)为无人机基于百度地图沿公路进行配送,该方法路径规划简单,无人机以30 m 的相对高度沿公路进行飞行,不需经过林地、草场,安全系数100% ,平均配送时间为34 min,效率对比人工配送提高43% ;图5(b)为无人机沿着目标点与配送点的直线距离进行飞行,该方法虽然平均配送时间最短为15 min,效率对比人工配送提高75% ,但是传统算法不能跟随地形变化而动态改变相对高度,一般采取相对起飞点400 m 的高度进行配送以避让障碍,并且该方法为纯直线配送,忽视了配送线路上经过的树林(F),存在坠机进而导致山火的风险,安全系数为76% 。
为此,本文通过效率和安全系数作为评价指标,开展基于A* 算法的路径规划,以提高配送效率。其中,安全系数Rs 为飞跃树林和草场等可能引起山火的时间占比,定义如下:
Rs =( t - t′/t) × 100% , (11)
式中:t 为飞行的时长、t′为在山火隐患区飞行时长。
2. 2 跳点式路径规划模型验证
针对当前常用的2 种无人机配送路径规划方法的不足,本文采用基于改进A* 算法的无人机动态路径规划。根据本文所设立场景,即西南山区,无人机航行区域除人口密集处外,主要为草场与林地。其中,林地需在旱季考虑无人机坠落导致的山火风险,而潮湿度较高的雨季则无需考虑该情况。
针对草场与林地地区,本文所设计路径规划系统在雨季与旱季的时节条件下所规划路径如图6 所示。配送方式效果对比如表1 所示。雨季时,本文模型利用式(3)和式(4)不仅避开了树林(F),而且计算出当前草场(S)具备跨越条件,于是在树林与草场过渡点进行跳跃,实现平均配送时间20 min、效率对比人工配送提高66. 7% 的同时,安全系数达到100% ;冬季时,本文模型利用式(3)和式(4)不仅避开了树林(F),而且计算出当前草场(S)不具备跨越条件,在飞过草场具备跳跃条件时,再进行跳跃,实现平均配送时间26 min、效率对比人工配送提高57% ,同时安全系数达到100% 。
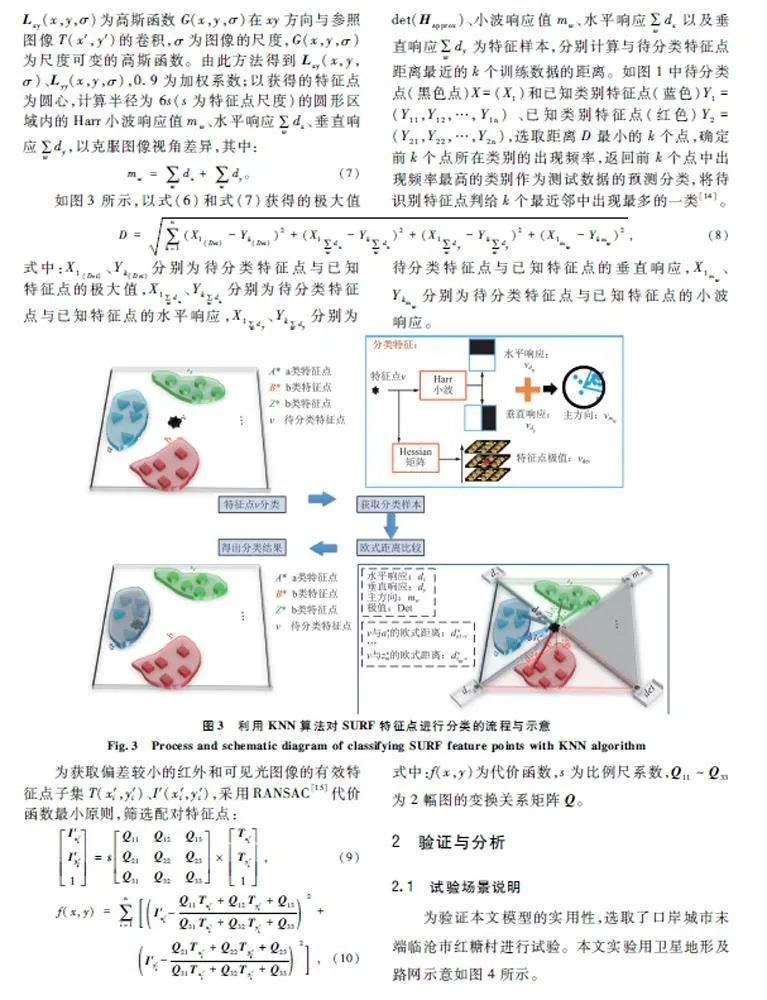
2. 3 目的地识别验证与比较
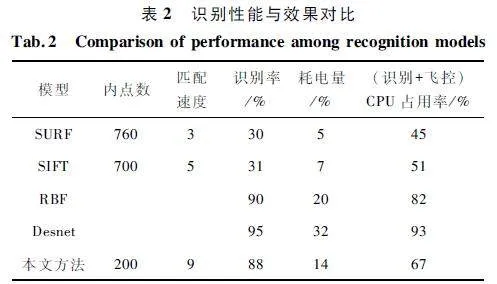
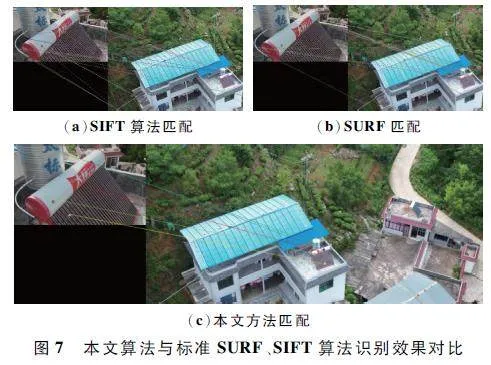
由于所处区域房屋在外形构造、墙面造型与颜色等多方面存在相似性,针对无人机需准确识别货物投送位置的问题,本文采取了“模板-识别”的方式实现有效定位。客户将依照一定要求拍摄卸货地点,无人机根据用户预存照片开展匹配识别,实验结果如图7 所示,不同算法在实现图像匹配的效果对比情况如表2 所示。
对比传统SURF 与SIFT 算法,由于本文采取了特征点分类的处理方式,虽然形成的特征点较少,匹配速度较SURF 低66% 、较SIFT 低43% ,同时CPU占用率更高,但是在相似物体、背景干扰等复杂情况下,本文方法匹配准确率有了大幅度提升,较SURF提高了55% 、SIFT 提高了59% 。
由表2 可以看出,本文所改进的SURF 算法兼顾了识别准确率与功耗问题,尽管准确率较RBF 低2% 、较Desnet 低7% ,为88% ,但功耗较RBF 低8% 、较Desnet 低16% ,CPU 占用率较RBF 低15% 、较Desnet 低26% 。此外,改进的模板SURF 算法无需训练,在物流配送中实用性更强。
3 结束语
当前,物流行业利用无人机执行“最后一公里”场景下的配送任务,以进一步提高配送时效,在一定程度下已经成为共识。但在实际作业过程中,无人机多采用通用型系统,没有针对不同地区采取差异化设计。针对此种情况,本文以西南地区口岸城市末端为应用场景,针对地形地貌复杂、既有道路曲折、路径区间内需避让障碍物分布较多的特点,提出一种兼顾飞行安全与效率的“跳点”式A* 算法开展飞行线路路径规划,该方法以既有道路为基本方案、以林地与草地为环境障碍,开展基于效率和安全系数为约束的路径规划。同时,针对目的地区域楼栋相似度较高,以及飞行角度与照片模板角度往往差异较大的情况,提出采用“模板+SRUF”算法的图像配准手段,从而实现准确定位卸货位置。
根据实际场景的验证情况,本文路径规划算法兼顾效率与安全,实现了在安全系数100% 条件下配送效率的提高,实现了在功耗仅为15% 左右条件下目的地识别准确率达到88% 的效果。对比已有的物流无人机系统,本文所设计系统在山区这一特定场景下的配送效率与功耗具备较为明显的优势。后续工作中,将在本文基础上考虑集群物流无人机系统的设计,以进一步提供及时的配送服务。
参考文献
[1] DORLING K,HEINRICHS J,MESSIER G G,et,al.Vehicle Routing Problems for Drone Delivery [J]. IEEE Transactions on Systems,Man,and Cybernetics:Systems,2017,47(1):70-85.
[2] 张启钱,许卫卫,张洪海,等. 复杂低空物流无人机路径规划[J]. 北京航空航天大学学报,2020,46 (7):1275-1286.
[3] 周浪. 农村电商物流配送“配送车+无人机”路径优化研究[D]. 武汉:武汉理工大学,2017.
[4] 郭兴海,计明军,温都苏,等. “最后一公里”配送的分布式多无人机的任务分配和路径规划[J]. 系统工程理论与实践,2021,41(4):946-961.
[5] TORABBEIGI M,LIM G J,KIM S J,et,al. Drone DeliveryScheduling Optimization Considering PayloadinducedBattery Consumption Rates [J]. Journal of Intelligent &Robotic Systems,2020,97(3):471-487.
[6] 陈存粮. 无人机末端物流配送算法研究[D]. 西安:西安电子科技大学,2021.
[7] 张洪海,任真苹,冯讴歌,等. 城市低空物流无人机飞行计划预先调配[J]. 系统工程与电子技术,2023,45(9):2802-2811.
[8] 蒋丽,杨露,梁昌勇,等. 基于无人机的高层住宅最后“一百米”配送优化[J]. 交通运输系统工程与信息,2022,22(4):236-245.
[9] 李姗,张洪海,刘?. 基于改进元胞自动机算法的物流无人机航路规划[J / OL]. 华中科技大学学报(自然科学版):1-7[2023-08-10]. https:∥doi. org / 10. 13245 /j. hust. 238475.
[10] 刘光才,马寅松,齐福强,等. 基于改进A* -人工势场法的城市物流无人机路径规划[J]. 飞行力学,2022,40(6):16-23.
[11] BEISHENALIEVA A,YOO S J. Multiobjective 3D UAVMovement Planning in Wireless Sensor Networks UsingBioinspired Swarm Intelligence [J ]. IEEE Internet ofThings Journal,2023,10(9):8096-8110.
[12] LI D C,YIN W P,WONG W E,et,al. QualityorientedHybrid Path Planning Based on A* and Qlearning forUnmanned Aerial Vehicle [J]. IEEE Access,2022,10:7664-7674.
[13] FU J Y,SUN G H,YAO W R,et,al. On Trajectory Homotopy to Explore and Penetrate Dynamically of MultiUAV[J]. IEEE Transactions on Intelligent Transportation Systems,2022,23(12):24008-24019.
[14] 崔昊杨,周坤,张宇,等. 电力设备多光谱图像融合及多参量影响的故障渐变规律演化预测研究[J]. 电网技术,2021,45(1):115-125.
[15] 陈贤儿,梁丹,傅云龙,等. Harris 与SURF 特征点检测的手术器械机器视觉识别方法[J]. 传感器与微系统,2023,42(2):118-121.
[16] 高玉潼,雷为民,原癑. 复杂环境下基于聚类分析的人脸目标识别[J]. 计算机科学,2020,47(7):111-117.
[17] 王国杰,胡一凡,张森,等. 深度卷积神经网络的遥感〗影像水体识别[J]. 遥感学报,2022,26(11):2304 -2316.
[18] ADEKANMI A A,SERESTINA V. FCNbased DenseNetFramework for Automated Detection and Classification ofSkin Lesions in Dermoscopy Images [J]. IEEE Access,2020,8:150377-150396.
作者简介
杨 晓 女,(1993—),硕士,讲师。主要研究方向:口岸物流、物流管理。
(*通信作者)姚 敏 男,(1979—),硕士,副教授。主要研究方向:区域经济及管理。
基金项目:云南省科技厅科技计划项目(202101BA070001-006);云南省哲学社会科学规划项目(QN202218)
