基于状态可观测性和多模态数据PF的移动目标跟踪
2024-09-19胡国华赵涓涓郝耀军







摘 要:为了实现对移动目标的跟踪,提出了一种新颖的基于目标状态可观测性和多模态数据粒子滤波(ParticleFilter,PF) 的跟踪方案。通过部署在目标移动区域中的传感器获得跟踪目标的距离和到达方向测量值,对接收到的数据进行预处理来计算PF 的观测值,以形成一个临时距离图像。通过利用状态更新函数和形成的候选图像模板确定目标状态向量;在PF 器中加入额外的加权阶段,使得PF 器可自适应地同步多模态数据流,以实现鲁棒的目标跟踪。仿真实验结果验证了所提方案能够有效地跟踪移动目标。
关键词:无线传感器网络;移动目标跟踪;状态向量;粒子滤波;多模态数据;传播延迟
中图分类号:TP393 文献标志码:A 开放科学(资源服务)标识码(OSID):
文章编号:1003-3106(2024)06-1504-08
0 引言
在大规模监控系统中,通常采用不同数量和不同类型的传感器来跟踪目标。如高速公路交通监控系统和无线传感器网络[1-2]。然而,微电子技术的进步导致廉价和高分辨率传感器的出现,使得每个传感器能够收集大量测量数据。在跟踪应用中,需要在线处理数据以获得对目标的估计跟踪。在贝叶斯框架中,涉及与状态空间模型相关联的滤波分布的顺序推断。在处理大量测量数据时,这是一项具有挑战性的任务。
另一个挑战是状态空间模型以非线性和/ 或非高斯噪声为特征时,滤波分布的封闭形式解通常是不可用的。序列蒙特卡洛(Sequential Monte-Carlo,SMC)方法[3]或粒子滤波(Particle Filter,PF)[4]是一组常用技术,用于获得滤波分布的离散近似。PF已成功地应用于诸多领域。然而,PF 在某些条件下易受权重简并和样本缺乏的影响,以及可能的巨大计算量。
由于模型的复杂性,单个传感器观测到的测量值可能不足以准确估计周围环境中目标的状态。因此,传感器节点需要协作估计状态。测量值可以在每个传感器节点上局部处理,也可以通过首先将所有测量数据传输到一个中央处理节点进行全局处理。在后一种情况下,可以采用单一的PF 来获得估计值。在文献[5]提出的方法中,测量值在传输到中央处理节点之前被量化。然而,在大量测量的情况下,这仍然会导致无法接受的通信成本。
另一种方法称为分布式PF。根据数据通信成本、网络结构、计算复杂度、估计精度、鲁棒性、可扩展性和延迟,分类为各种各样的分布式PF。当分布式PF 应用于具有活跃节点的网络时,一般有2 种结构:第一种是基于分布式PF 的融合中心,该结构采用每个传感器节点上的局部PF 获取局部后验信息,然后将后验信息传输到融合中心。融合中心结合所有局部后验信息来得到全局后验的估计值,这是通过将局部后验表示为高斯混合[6]和直方图[7]来实现的。这种技术的不足之处是全局后验只在集中处理节点可用。第二种结构称为完全分布式PF。在这种情况下,每个节点通过与网络中的其他节点通信来计算全局后验。完全分布式PF 有许多变体。基于共识的分布式PF 已经用于描述网络运行,每个传感器节点只能与相邻的传感器节点通信。这些PF 根据以分布式方式计算的内容而变化。在文献[8-9]提出的算法中,全局粒子权重由局部权重计算得到;另一种方法是基于高斯或高斯混合近似的局部后验进行全局后验的分布计算;另外的方法是全局似然函数[10]的分布式计算;文献[11]提出采用参数逼近来表示分布式传感器网络PF 中的全局似然函数。
在静态马尔科夫链蒙特卡洛(Markov ChainMonte-Carlo,MCMC)仿真中,已经提出了多种不同的方法来处理大量数据。基于分而治之的技术着重于对测量值进行细分,并在每个细分的测量集上并行运行单独的MCMC 采样器。从单独的MCMC 采样器中得到的样本,称为局部样本,然后将其合并得到完全后验分布的样本,称为全局样本。分而治之法的不同之处在于如何组合局部样本来获得全局样本。在文献[12]提出的算法中,全局样本是局部样本的加权平均,该方法在高斯假设下仅在理论上是有效的。在文献[13]提出的算法中,来自单独的MCMC 采样器的局部后验被近似为高斯或高斯核密度估计,然后可以通过局部密度的乘积得到全局样本。文献[14]提出了一种通过将离散核密度估计表示为连续的Weierstrass 变换的思想。在文献[15]提出的算法中,组合是基于局部后验的几何中值,局部后验通过将局部后验嵌入到再生核Hilbert 空间中用Weiszfeld 算法近似。分而治之技术在应用中通常面临困难,其中局部后验相差很大,且不满足高斯假设的。文献[16]提出了一种分而治之策略,尝试克服不同局部后验的挑战,并将高斯假设放宽为更一般的指数类后验分布假设。该方法基于期望传播(Expectation Propagation,EP)算法。
与大数据量的分布式目标跟踪相关的2 个挑战是:由于数据处理的计算复杂度和需要通过网络传输大量数据时的巨大通信成本。
随着微电子技术和无线通信的发展,新的低功率射频传感器可以发射微波信号来确定被探测目标的距离、速度、达到方向(Direction of Arrival,DOA)和大小[17-18],能够对地面上移动的车辆以及行人目标进行距离估计。距离和声测量值是目标跟踪的互补模式,它们一起可以确定目标在笛卡尔坐标系中的位置,因为距离和方位估计值映射到目标位置估计值在二维空间是一对一的。
PF 作为一种数据处理技术,已应用于诸多领域,特别是在无线传感器网络中得到了广泛应用,如用于移动目标的跟踪[19-20]。PF 是一种基于SMC 方法的贝叶斯推理过程,其基本思路是使用一系列带权重的样本来表示物体位置的分布空间,并基于“预测-更新”这一循环过程来实现定位和迭代式跟踪移动目标。PF 能够广泛地应用于解决统计推理和参数估计等问题,构建采用状态空间的方法[21]。
滤波器状态更新函数基于局部线性运动模型。滤波器观测方程通过采用图像模板匹配的思想得到。当精确的模型可用时,模板匹配的观点是非常有效的[22-23]。
本文提出了一种基于移动目标的状态可观测性和PF 相结合的移动目标跟踪新方法,克服了传感器节点互联网络中目标跟踪的难题。方法非常适合处理来自每个传感器节点的大量测量值,包括大量不是由被跟踪目标生成的测量值,称为杂波测量值。在本文的问题中,当接收到一组距离测量值时,首先形成一个临时距离图像。然后通过利用状态更新函数和目标状态向量形成候选图像模板;假设DOA 和距离测量值在真实距离测量值周围呈正态分布,数据差错概率和杂波密度均为常数。为了得到PF 函数,采用鲁棒的牛顿-拉夫森递归来计算后验模式,使用回溯步长选择,对目标运动施加平滑约束[24]。此外,考虑声传播延迟,在PF 器中加入了额外的加权阶段-预加权阶段,利用当前估计期间接收到的滞后声数据,对代表前一次迭代的后验粒子集重新进行加权。仿真实验结果表明,本文方法能够有效地跟踪移动目标。
1 跟踪方案
1. 1 跟踪原理
雷达和声学测量是目标跟踪的互补模式,因为它们的组合可以确定目标在笛卡尔坐标系中的位置。用于雷达声学传感器的PF 器,可自适应地同步多模态数据流,以实现鲁棒的目标跟踪。重点是配置传感器,因为距离和方位估计值映射到目标位置估计值在二维空间是一对一的。
联合声-雷达PF 是新的低功率射频传感器,传感器发射微波信号来确定被探测目标的距离、速度和大小,能够对多个地面车辆以及行人目标进行距离估计;PF 构建可采用状态空间方法。状态向量由笛卡尔坐标系中的目标位置(xt,yt )和速度(vx,t,vy,t)构成。在给定的PF 多模态观测值下,研究该状态向量的可观测性。滤波观测值基于一组到达方向和距离测量值。因此,对接收到的声数据和雷达脉冲返回进行预处理来计算PF 观测值。这些观测值由PF 自适应同步,以补偿声传播延迟;滤波器状态更新函数基于局部线性运动模型。滤波器观测方程通过采用图像模板匹配的思想得到。当精确的模型可用时,模板匹配的观点是非常有效的。当接收到一组距离测量值时,首先形成一个临时距离图像;然后通过利用状态更新函数和目标状态向量形成候选图像模板。通过确定最佳匹配图像模板,来确定目标状态向量。假设DOA 和距离测量值在真实距离测量值周围呈正态分布,数据差错概率和杂波密度均为常数。
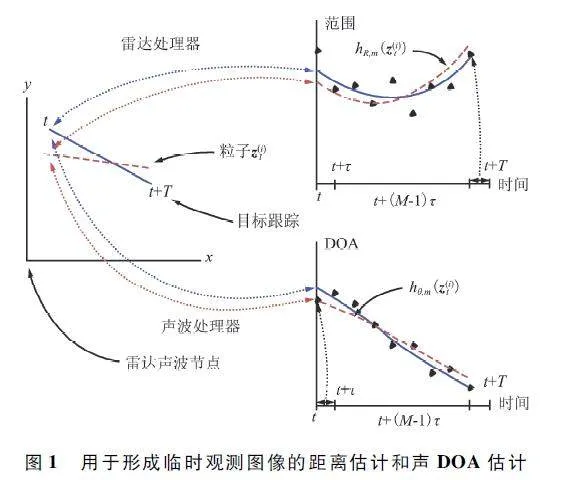
PF 器考虑传播延迟,假设一个单一目标。PF状态向量zt = [xt,yt,vx,t,vy,t] T 由笛卡尔坐标系中目标的位置和速度构成。利用一组距离和声测量数据,估计在T s 间隔(对于地面目标,通常T = 1 s)的状态向量,如图1 所示,利用状态向量实现形成候选图像模板。然后PF 器通过确定每个模板与观察图像的匹配程度来生成这些状态向量的分布。假设目标在估计时间间隔内匀速运动。
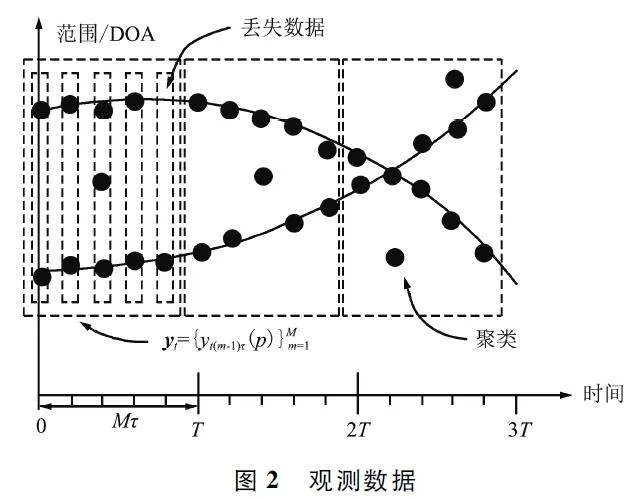
首先以更小的时间间隔τ = T / M (如M = 10)对接收到的目标多模态数据进行处理,得到一批目标DOA 和距离估计值:
yθ,t = {θt+(m -1)τ(pθ )}Mm= 1 , (1)
yR,t = {Rt+(m -1)τ(pR )}Mm= 1 , (2)
式中:m 为批指标,pθ 为每批指标的DOA 估计值数量,pR 为每批指标的距离估计值数量。如图2 所示,当目标被PF 器跟踪时,观测数据不一定是有序的,但基于图像的观测方法提供了一个自然的排序。通常假设批测量值在真实目标值周围成正态分布,声DOA 测量值的方差为σθ2 ,距离测量值的方差为σR2 。批估计值还可能包括杂波引起的伪峰值,通常假设为泊松分布,2 种模式的速率分别为λθ 和λR 。此外,假设每个模式的数据丢失概率q 恒定不变。
观测数据批次采用模板匹配思想[22]。候选图像模板通过采用目标状态向量的离散实现来形成,称为粒子。通过确定每个图像模板与观测图像的匹配程度来确定粒子的分布。PF 器自适应同步其多模态数据,以减少估计偏差。由于电磁波和声波在空气中以不同的速度传播,在距离和DOA 测量值之间存在时间延迟,这个延迟td 依赖于目标和传感器之间的距离:
式中:c 为光速,(sx,sy)为传感器在笛卡尔坐标系中的位置。
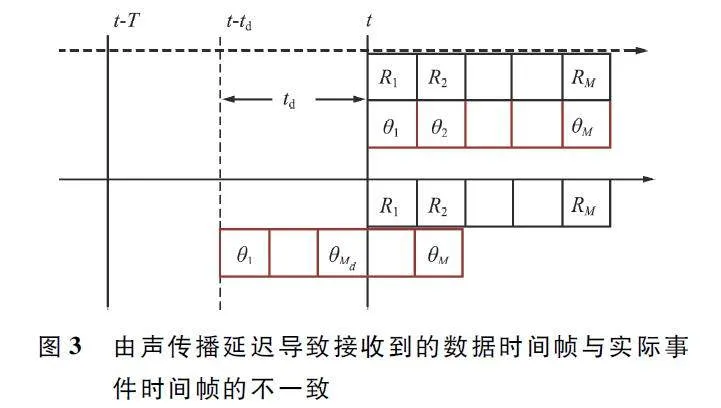
图3 展示了PF 器如何处理一个估计周期内接收到的多模态数据。PF 跟踪器在事件时间帧上执行估计,用于实时跟踪。因此,在估计期间接收到的声数据将与td 前发生的实际事件相对应。滤波器采用在时刻t 开始的估计周期中接收到的距离数据(R1 ,R2 ,…,RM )和部分声数据(θMd+1 ,θMd+2 ,…,θM ),提出并对其粒子进行加权,将剩余的声数据(θ1 ,θ2 ,…,θMd)用于对t-T 后的粒子预加权。
1. 2 状态向量的可观测性
可观测性是一个经典的控制理论概念,文献[25]研究了状态空间系统的状态向量是否可以完全根据其观测值确定。在本文的跟踪问题中,当距离批数据与对应的声数据重叠2 个或多个批观测量值时,状态向量就是可观测的,从而得到2 个锚空间点,从锚点空间就可以确定目标速度。本文表明,只要td ≤T-2τ,即使没有重叠,状态向量也是可以观测到的。
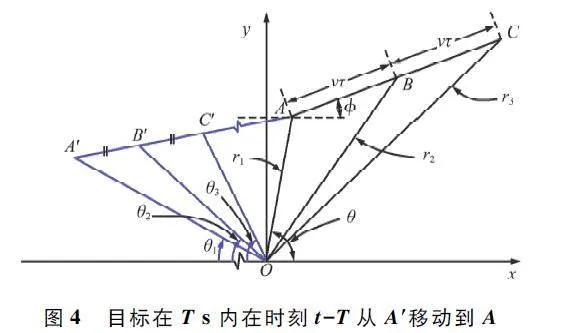
图4 展示了给定3 个距离测量值,根据文献[26]并利用△OAB 和△OAC 上的余弦定理,就可以确定目标速度v 和目标航向减去初始DOA 即φ-θ。目标的达到方向θ 和目标航向θ 不能唯一地根据距离测量值来确定,而图4 中的达到方向θ 可以确定,如果3 个角度的测量值可用从前面批获得,根据是采用△OA′B′和△OA′C′上的余弦定理和恒速假设。因此,如果当前观测到的声数据允许观测在前一个估计周期时间帧内的3 个批次测量值,就可以充分观测到当前状态。在开始时刻t 的批次期间目标的速度可计算为:
通过利用t-T 和t 之间的恒速假设,可以通过角度测量值(θ1 ,θ2 ,θ3 )来确定达到方向θ。
1. 3 数据模型
1. 3. 1 状态更新密度
状态更新函数可以从目标运动的物理特性得到,并将其建模为局部线性。得到的状态更新概率密度函数(Probability Density Function,PDF)为:
p(zt |zt-T ) = N(AT zt-T ,Σz ), (5)
式中:(μ,Σ)为均值为μ、协方差为Σ 的高斯密度。
目标运动的线性化矩阵为:
式(5)中的噪声协方差矩阵Σz 为全秩对角形式,而不是模拟位置和速度之间的相关性的秩亏形式。在这种情况下,状态更新PDF 包含Dirac 的δ函数,因此不适合批处理。
1. 3. 2 观测密度
PF 观测值yt = {yθ,t,yR,t }是由声和距离观测值构成,假设它们对于给定的当前状态向量是独立的。因此,滤波器的多模态数据似然是每个模态各自似然的乘积:
p (yt |zt) = p(yθ,t| zt)p(yR,t| zt)。(7)
把在一个时间间隔τ 内的距离值和接收到的声数据用于估计目标距离和DoA。每T = MτF 器使用一批M 个这样的估计值来估计目标的状态。假设测量批次在真实目标范围内呈正态分布,且数据丢失概率q 恒定不变,测量批次可能包含由于杂波而产生的虚假估计。
每个模态的观测密度可采用文献[27]中的参数得到,杂波密度为:
p(θ |θ 为杂波) = λθ 且p(R| R 为杂波) = λR 。(8)
假设给定批测量值,对于每个批指标m 的2 种模态中的单个测量值属于目标,或者对于该模态目标丢失。多个测量值意味着杂波的存在。因此,数据似然为:
1. 4 PF
1. 4. 1 提出的函数
给定问题的状态空间描述,PF 的解就可以得到。本文将提出的函数记为g(zt| yt,zt-1 ),来直接近似目标后验密度:
g(zt |yt,zt-T )≈ p(zt| yt,zt-T )∝ p(yt| zt)p(zt |zt-T ),(11)
式中:p(zt |zt-T)由式(5)给定,p(yt |zt )由式(9)给定。近似式(11)不依赖于当前状态zt。实际上,近似式朝后验较高概率区域移动粒子粒流,更有效地捕获由于反应当前观测数据影响的目标移动。此外,更多的粒子在最后的重采样阶段存活下来,随着系统演变,生成更好的状态。
提出的函数用拉普拉斯方法来近似数据似然项p(yt| zt)。拉普拉斯方法是概率密度函数的一种解析近似,它基于密度在其模态周围的高斯近似,其中密度对数的逆Hessian 被用作为协方差近似,它可以提供与基于密度函数的三阶展开的近似一样的精度,有时甚至更精确。这种方法在计算上很有吸引力,因为它只需要一阶和二阶求导。精确近似的条件是后验密度为单峰密度或由单模控制。
为了计算p(yt| zt )的模式zM 及其在模式处的Hessian H,对式(6)的负对数似然使用回溯步长选择的牛顿搜索算法[8],算法在充分减小条件下实现。但在这种情况下,牛顿算法有数值灵敏度问题。因此,作为替代,本文将其成本函数改为以下成本函数来确定模式zM :
成本函数式(12)是直接对全后验的近似,由3 项构成:前2 项与数据分布的负对数似然函数有相同的极小值,最后一项函数是一个正则项,迫使解zM 靠近某个向量^z。参数^z 表示利用运动更新将前一个时间步的初始粒子集向前传播得到的最能说明当前数据集的粒子。
即使有可用的解析关系,Hessian 的计算仍然存在问题。如果直接从精确表达式计算式(12 )的Hessian,则可以表明所得到的Hessian 表达式不能保证是正定的,需要进行修正以使每次迭代的牛顿校正有效。因此,在计算Hessian 的最终表达式时,从解析式中忽略了包含二阶导数的项。在这种情况下,Hessian 就是梯度的外积函数,可以证明它是半正定的。
在对上述数据似然进行近似后,得到了用于PF函数的最终表达式为:
任何协方差近似都可以使用,因为PF 的加权阶段可以处理任何产生的差异。对提出函数的特殊协方差选择源于滤波器的效率问题。此外,即使声测量和雷达距离测量值之间没有重叠即td ≥T,这种策略也有效。这是因为即使没有关于当前目标状态的声信息,成本函数式(12)中的最后一项也会保持成本函数的单峰。在这种情况下,逆Hessian 并不是数据似然协方差一个很好的近似,而且一个恒定的预设协方差矩阵可以用于粒子。
1. 4. 2 粒子权值
PF 的加权阶段考虑了粒子建议方式和后验实际分布之间的任何差异。与一般的PF 算法不同,本文的PF 算法有2 个加权阶段。第一个加权阶段采用声数据的子集(θ1 ,θ2 ,…,θtd ),它携带了先前状态的信息。这个阶段称为预加权阶段。
预加权采用当前接收到的声数据中的信息来重新评估代表t-T 时刻后验粒子集的重要性。当没有关于当前阶段的信息时,预加权仍可估计状态向量。基于滞后数据模态,预权值的表达式如下:
算法1 所示为本文提出的PF 跟踪实现的伪代码。
1. 4. 3 本文EPPF 与现有PF 算法复杂度分析
根据式(16)~ 式(20)和算法1 可知,EP-PF 主要有4 个步骤。① EP-PF 算法获取多模态粒子状态向量的计算复杂度为O(M)。② 采样粒子,用于更新粒子权值的高效计算,其时间复杂度为O(N)。③ 通过更新粒子权值和归一化粒子权值,时间复杂度为O(N2 +td)。为了获得重采样,需要的计算复杂度为O(N)。④ 为了实现对传感器节点数D 的跟踪,需要的计算复杂度为O(N2 / D);通常情况下,N 远大于M 和D,故本文的EP-PF 算法与现有的PF 算法的计算复杂度是同阶的。
2 算法仿真结果
算法仿真采用以下参数,除非另有说明。PF[9]和EP-PF 的粒子数分别为N = 10 000 和N = 5 000。独立仿真运行的次数为NI = 50。时间仿真步数T =70。运动模型参数Ts = 1,σx = 0. 5。2 个实验中传感器节点数分别为D = 4 和D = 8。第二个实验的目标观测模型参数为λX = 200 和λX = 100,且Σ = I(I为单位阵)。对于2 个实验的杂波参数分别为λC =100 和λC = 50,Ac = 4×104 。EP 迭代次数L = 2。
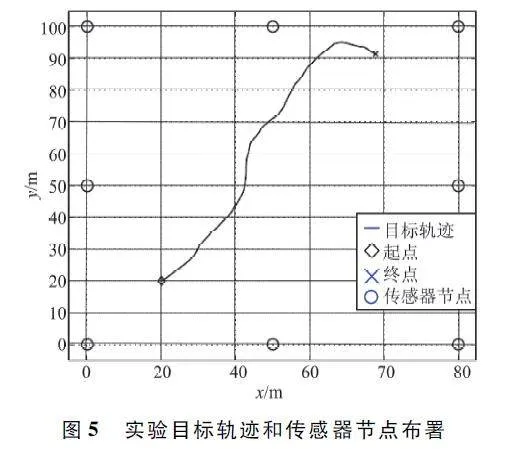
实验的目标轨迹和传感器节点相对于目标的位置如图5 所示。
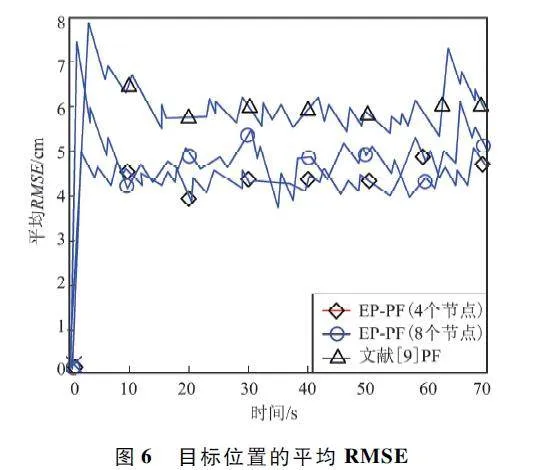
选择每种算法的粒子数,以匹配2 种算法在每个时间步中需要处理的粒子数。EP 迭代次数L 决定了粒子集需要重新计算的次数。结果说明了最小次数的EP 迭代。对于4 个传感器节点的情况,只考虑图5 中位于角落的传感器节点。对于4 个和8 个传感器节点,总的平均测量数量是相同的。该位置的平均均方根误差(Root Mean Square Error,RMSE)如图6 所示。当在EP-PF 中考虑更多的节点时,近似程度越大,导致初始误差的峰值越大。总的来说,与PF 相比,采用EP-PF 仅进行2 次EP 迭代时,跟踪精度的损失可以忽略不计;可以看到,对于4 个和8 个传感器节点乃至更多传感器节点,本文所提方法即EP-PF 算法的平均RMSE 都要比现有的PF 算法[9]的平均RMSE 小。
图7 所示为采用本文PF 算法跟踪器成功地跟踪一个地面移动目标的结果,图中黑点为对运动目标的跟踪轨迹,实线为运动目标的实际运动轨迹。在仿真中,距离-声节点位于原点,并假设具有半球形覆盖范围,目标跟踪开始于(-150 m,150 m)处,目标在x 方向上的速度为15 m / s,在y 方向上的速度为25 m / s。在DOA 估计和距离估计中分别加入标准偏差为1°和2 m 的独立的零均值白高斯噪声来模拟噪声测量。
图7 中左上方的图形显示了不进行延时补偿的偏差跟踪结果(虚线)。产生偏差的原因是滤波器跟踪了延迟的DOA 观测值(图3 中右上方虚线)。跟踪偏差随着目标的速度和目标距测量节点的距离增加而增加;还可以看到,声DOA 在t =5 s 到t = 15 s之间的延迟超过1 s。然而,由于采用了加权策略,PF 器也能够实时跟踪目标。
3 结束语
本文针对单节点的多模态数据融合移动目标跟踪问题提出了一种PF 解决方案。在实时跟踪约束下讨论了该问题的可观测性,提出了一种加权策略来解决声传播延迟问题。构建了滤波器似然,对于丢失数据或虚假观测也是鲁棒的。在一个声数据由于目标距离延迟了大约1 s 的实时跟踪场景中验证了PF 跟踪器的性能。
参考文献
[1] MIHAYLOVA L,HEGYI A,GNING A,et al. ParallelizedParticle and Gaussian Sum Particle Filters for LargescaleFreeway Traffic Systems[J]. IEEE Transactions on Intelligent Transportation Systems,2012,13(1):36-48.
[2] 韩睿. 多源传感器信息融合的高速公路视频光传输平台研究[J]. 信息与电脑(理论版),2018(18):99-100.
[3] SVENSSON A,SCHOEN T B,LINDSTEN F. Learning ofStatespace Models with Highly Informative Observations:ATempered Sequential Monte Carlo Solution[J]. MechanicalSystems and Signal Processing,2018,104:915-928.
[4] 王向前,冉维,马飞. 邻域迭代重采样粒子滤波的纯方位目标跟踪[J]. 计算机工程与应用,2017,53(13):160-166.
[5] WANG Y,WANG X G,SHAN Y Z,et al. Quantized Genetic Resampling Particle Filtering for VisionbasedGround Moving Target Tracking [J]. Aerospace Scienceand Technology,2020,103:925-934.
[6] 何祥宇,李静,杨数强,等. 基于ET-PHD 滤波器和变分贝叶斯近似的扩展目标跟踪算法[J]. 计算机应用,2020,40(12):3701-3706.
[7] 高野. 基于改进高斯混合模型的体育视频运动目标检测与跟踪[J]. 现代电子技术,2017,40(19):91-93.
[8] ZHAO Y B,LI X F,SHA Z. Distributed Particle FilterUsing Pairwise Kselective Gossip for Cognitive Radio Positioning [C]∥ 2016 19th International Symposium onWireless Personal Multimedia Communications(WPMC).Shenzhen:IEEE,2017:524-529.
[9] ZHANG Y,ZHANG L Y,HAN J F,et al. DistributedGaussian Mixture Modelbased Particle Filter Method forChemical Pollution Source Localization with Sensor Network[J]. Cluster Computing,2017,20(4):2905-2917.
[10] 易伟,王经鹤,黎明,等. 一种基于似然函数近似的分布式多传感器检测前跟踪方法:CN107247257B [P].2020-03-27.
[11] KANG K,MAROULAS V,SCHIZAS I,et al. ImprovedDistributed Particle Filters for Tracking in a Wireless Sensor Network [J ]. Computational Statistics & DataAnalysis,2018,117:90-108.
[12] NI Y,JONES D,WANG Z Y. Consensus Variational andMonte Carlo Algorithms for Bayesian Nonparametric Clustering[C]∥2020 IEEE International Conference on BigData. Atlanta:IEEE,2020:204-209.
[13] WANG X Y,GUO F J,HELLER K A,et al. ParallelizingMCMC with Random Partition Trees[EB/ OL]. (2015-06-10)[2023-07-01]. https:∥arxiv. org/ abs/ 1506. 03164.
[14] C KA-AT, MIASOJEDOW B,NIEMIRO W. ParalelParticle MCMC with Poisson Resampling:Parallelizationand Continuous Time Models [EB / OL]. (2017-07-06)[2023-07-10]. https:∥arxiv. org / abs / 1707. 01660.
[15] MINSKER S,SRIVASTAVA S,LIN L Z,et al. Robust andScalable Bayes via a Median of Subset Posterior Measures[J]. The Journal of Machine Learning Research,2017,18(1):4488-4527.
[16] DE PAOLA A,FERRARO P,GAGLIO S,et al. AnAdaptive Bayesian System for Contextaware Data Fusionin Smart Environments[J]. IEEE Transactions on MobileComputing,2017,16(6):1502-1515.
[17] GRAEBENITZ S,MERTENS M. BELFIORI F. SequentialData Fusion Applied to a Distributed Radar,Acoustic andVisual Sensor Network[C]∥2017 Sensor Data Fusion:Trends,Solutions,Applications (SDF ). Bonn:IEEE,2017:1-6.
[18] 徐鹏,郭良浩,闫超,等. 方位和径向速度联合的浅海目标运动分析方法[J]. 声学学报,2018,43(3):323-333.
[19] 周帆,江维,李树全,等. 基于粒子滤波的移动物体定位和追踪算法[J]. 软件学报,2013,24(9):2196-2213.
[20] 孟凡琨,巨永锋,温立民,等. 基于APRBA 粒子滤波算法的移动目标跟踪算法[J]. 控制工程,2017,24(6):1212-1217.
[21] 林静. 基于分段粒子滤波的状态空间模型参数估计[D]. 厦门:厦门大学,2018.
[22] XIONG L,ZHANG X F,LIAO J L,et al. MultiobjectTracking Based on HOG Template Matching and Nonmaximum Convergence Algorithm [J ]. InternationalJournal of Signal Processing,Image Processing andPattern Recognition,2017,10(1):233-242.
[23] 房广江,孔一荟. 基于模板匹配和Kalman 滤波器的目标跟踪[J]. 机械制造与自动化,2018,47(4):205-207.
[24] GRAPIGLIA G N,YUAN J,YUAN Y X. On the Convergenceand Worstcase Complexity of Trustregion and Regularization Methods for Unconstrained Optimization[J].Mathematical Programming,2015,152(1-2):491-520.
[25] 刘鹏,任一峰,张亚,等. 惯性导航系统可观测性分析与可观测状态确定的图方法[J]. 控制理论与应用,2020,37(1):98-106.
[26] MESSAOUDI Z,OUSSALAH M. Multiple Target TrackingUsing Particle Filtering and Multiple Model for Manoeuvring Targets[J]. International Journal of Automation andControl,2015,9(4):303-332.
[27] KAMAL A T,BAPPY J H,FARRELL J A,et al. Distributed Multitarget Tracking and Data Association in VisionNetworks[J]. IEEE Transactions on Pattern Analysis andMachine Intelligence,2016,38(7):1397-1410.
作者简介
胡国华 男,(1975—),硕士,副教授。主要研究方向:语音情感识别、智能算法优化。
赵涓涓 女,(1975—),博士,教授。主要研究方向:智能信息处理、人工智能、图像分析与识别。
郝耀军 男,(1979—),博士,教授。主要研究方向:智能信息处理。
基金项目:山西省自然科学基金(20210302124330);山西省高校科技创新项目(2019L0847 );教育部人文社科青年基金项目(20YJC630034);忻州师范学院五台山文化生态研究院专题项目(2020133101)
