数据驱动的无人机异常检测算法综述
2024-09-19王岩李少波张仪宗张羽张安思


摘 要:随着无人机(Unmanned Aerial Vehicle,UAV) 集成化与智能化的不断发展,UAV 在军事领域和民用领域得到广泛应用。因此,对UAV 的安全飞行提出更高的要求,而UAV 异常检测在保障安全飞行、减少经济损失等方面有着重要作用。近年来,数据驱动的方法在特征提取、非线性问题求解和准确率等方面的优势,使其成为UAV 异常检测的主流算法。对UAV 异常类型及异常数据特点进行分析与总结。梳理并总结国内外UAV 数据驱动的异常检测算法的研究现状,从监督学习、半监督学习和无监督学习三方面对UAV 异常检测进行了归纳与总结,并分析了各类算法的优缺点。针对现有算法的研究现状,展望了未来UAV 异常检测领域的发展趋势,旨在为后续相关研究提供参考。
关键词:异常检测;无人机;监督学习;半监督学习;无监督学习;数据挖掘
中图分类号:TP277 文献标志码:A 开放科学(资源服务)标识码(OSID):
文章编号:1003-3106(2024)06-1407-14
0 引言
近年来,随着电子技术、传感器和计算机技术的快速发展,无人机(Unmanned Aerial Vehicle,UAV)已经在军事[1]、应急搜救[2]、植物保护[3]、航空摄影[4]和新闻报道[5]等领域有了广泛的应用。UAV 具有质量轻、体积小、便于携带以及能够在极端的环境中进行作业等优点,可以帮助人类完成特定的任务。
典型的UAV 系统主要由UAV、地面站以及传输信息的通信链路组成。UAV 的飞行过程主要包括起飞、悬停、巡航、俯仰、仰角、偏航和避障等动作。这些动作由飞行控制系统执行,该系统控制发动机的工作状态,UAV 状态的数据通过各种传感器传回飞行控制系统,飞行控制系统对数据进行分析,给出指令,执行器根据指令调整飞行动作[6]。
UAV 在执行飞行任务时,具有很高的精密性和多样性,因此这对UAV 飞行过程中的稳定性、可靠性和安全性提出了很高的要求[7],但是UAV 的可靠性和安全性相比于有驾驶员的飞机具有较大的差距[8]。仅2001—2014 年,美国已有400 多架UAV发生事故并坠毁,据相关调查显示,造成UAV 坠毁的主要原因有天气因素、人员操作、系统故障和UAV 飞行时部件损坏[9]。天气因素可参考相关预报从而避免,而系统故障和UAV 飞行时部件损坏可由UAV 飞行时自行检测、预测进行避免。UAV 事故的频繁发生,造成了巨大的经济损失,因此UAV的异常检测技术对减少UAV 事故的发生、改善UAV 系统运行的可靠性,具有十分重要的意义。
1 UAV 异常检测概述
1. 1 异常检测
异常检测涉及几个不同的问题,例如如何描述输入实例、如何获取表示实例正常或异常的标签、如何识别异常类型以及如何报告给定数据集中的异常[10]。目前对于异常没有明确的定义[11],异常检测首先建立正常的行为数据,其次通过算法计算出与正常的行为数据的偏差,判断是否超过所设定的阈值,判断是否发生异常[12]。
异常检测是一个包括统计学、过程控制、信号处理和机器学习等不同技术联合发展的领域,其主要任务是能够在概率分布方面、时间序列中信号的形状和振幅方面,识别出偏离或不符合预期的数据。异常检测的主要挑战之一是很难明确地分清正常数据与异常数据,因为二者之间的边界通常是不明确的,并且在某些领域的飞行过程中,二者之间的边界是不断演变的,这无疑增加了检测的困难性。
通常,异常发生是小概率事件,因此得到用于训练和验证模型的数据集较少,并且存在着数据集的比例失衡和不可用的风险。因此在UAV 的异常检测中,相比于监督学习和半监督学习,无监督学习更常被使用。
1. 2 UAV 异常类型
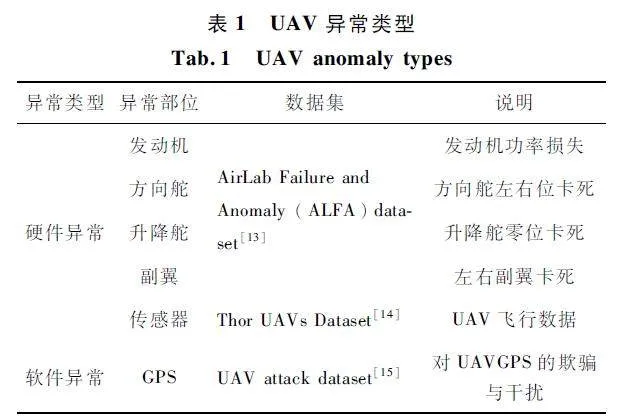
UAV 在飞行时可能会遭遇各种预期之外的状况,比如传感器线路老化,磁场的干扰以及进入到计划之外的任务环境中。因此异常的类型也是多种多样的,UAV 异常类型如表1 所示。
(1)硬件异常
UAV 属于集成化、智能化的装备,由各种零部件组成,每种零部件发生异常都有可能对UAV 的安全飞行造成威胁,因此了解并清楚一些异常类型,对未来相关部件的异常检测有着重要的意义。目前许多对UAV 硬件异常检测研究的类型有:叶片、传感器、机翼、电池功率、电机、升降舵、方向舵和副翼等。
(2)软件异常
UAV 的安全飞行是由UAV 本身零部件的可靠性以及飞行控制系统与地面通信站之间的信号传递所决定的。UAV 在飞行时可能会受到来自网络层面的攻击,导致UAV 接收到错误的信息及指令,导致UAV 无法正确执行相应的飞行动作,从而导致任务失败,造成严重的损失。
1. 3 UAV 异常数据特点
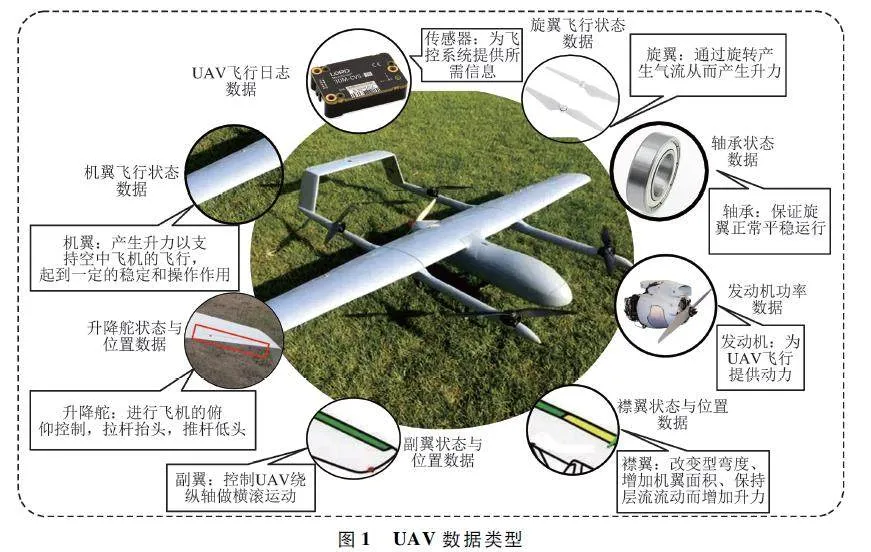
UAV 数据是能够体现异常检测算法的重要数据特征,UAV 数据类型如图1 所示。通过对UAV数据的不断分析,从而实现对UAV 的异常检测。异常数据是指在整个数据集中,出现的与其他数据有着不同的数据,或是某些数据与整体数据表现出不一样的特征,而这些数据往往具有以下特点:
① 异常样本稀少。UAV 具有较高的可靠性,飞行时多为正常飞行状态,因此能够获得异常数据较少。
② 样本数据分布不平衡。由于异常发生的情况较少,因此获取的数据中,存在着大量的正常数据,可能存在某个异常被大量的正常数据所包围,从而在检测中难以发现该异常[16]。
③ 异常类型多样[17]。UAV 在执行复杂任务时,会遭遇各种复杂的情况,因此可能发生的异常种类较多,如机翼受损、传感器故障、转子受损和信号无法接收等。
④ 时空依赖性。UAV 在时空中异常检测,不仅要考虑到当前状态与先前状态、当前时间的关系,还要考虑到当前状态与当前空间的关系,UAV 位置发生改变,也可能出现异常[18]。
⑤ 具有隐藏性。异常在低维数据空间中往往具有很好的特征表现能力,而在高维数据中的异常检测表现不明显,具有一定的隐藏性[19]。
⑥ 信息密度低[20]。UAV 数据集中,存在着大量的冗余数据,而这些数据往往是不必要的,具有相关性的信息数据较少。
2 UAV 异常检测算法研究现状
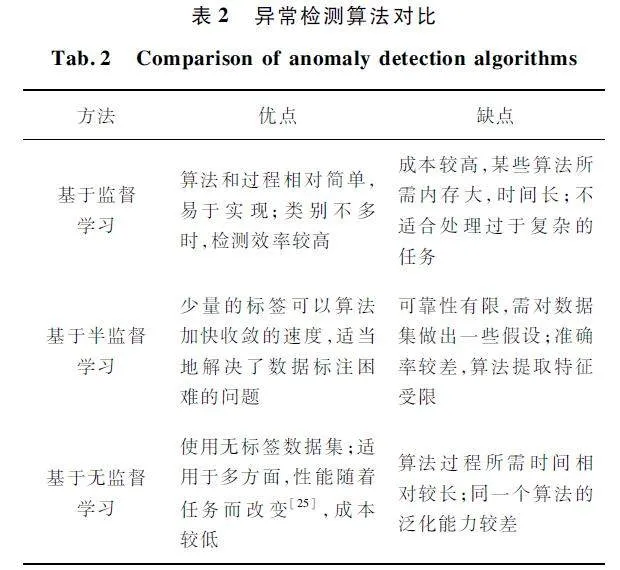
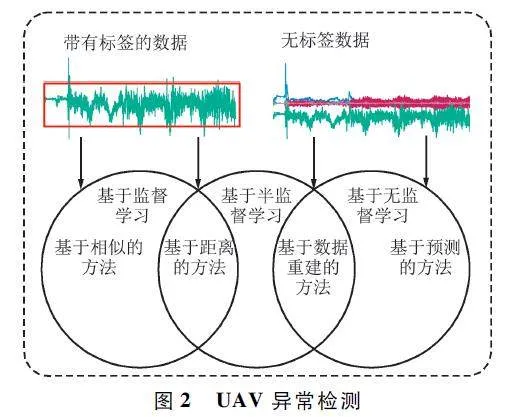
异常检测算法的应用十分广泛,包括民航飞行时的异常检测[21]、高光谱中的异常检测[22-23]、网络安全性的异常检测[24]等领域。近年来,随着机器学习和神经网络模型的不断发展,研究者将异常检测应用于各个领域当中。通过标签的可用性,将UAV异常检测算法分为监督学习、半监督学习和无监督学习,如图2 所示。监督学习、无监督与半监督学习的异常检测算法对比如表2 所示。
2. 1 基于监督的方法
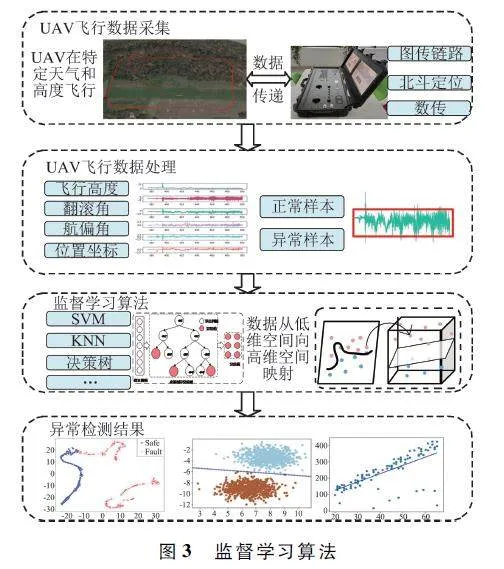
监督学习算法如图3 所示,主要通过将带有标签的数据在模型中进行训练,之后利用训练好的模型对某个给定的新数据利用模型预测它的标签,模型输出的结果与训练时使用的数据和标签有关。常见的算法有支持向量机(Support Vector Machine,SVM)、最邻近节点(K-Nearest Neighbor,KNN)和决策树(Decision Tree,DT)等。
2. 1. 1 基于SVM 的方法
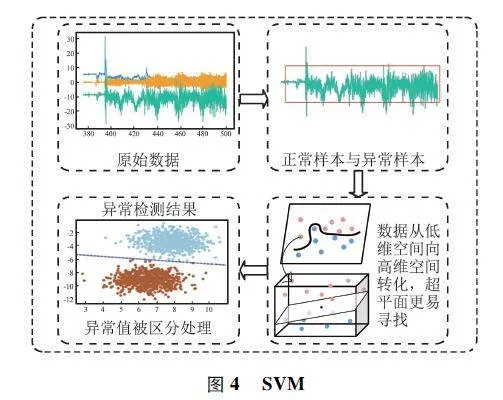
SVM 通过对低维数据进行映射成高维的数据,从而实现对数据的分类,因此SVM 具有很好的处理非线性数据样本的能力,对二分类问题异常检测具有较高的准确率和较强的泛化能力,能够处理正常数据和异常数据的样本不平衡[26]。SVM 通过核函数来寻找非线性关系,即高维数据经过核函数映射成低维的数据[27],SVM 如图4 所示。基于SVM 良好的二分类性能以及分类的效率不依赖分类实体的特征数量,Fan 等[28]使用SVM 对磁信号进行异常检测。Ding 等[29]使用SVM 对UAV 飞行数据进行异常检测,并使用真实的数据进行了验证。Duo 等[30]基于SVM 模型,结合粒子群优化算法和遗传算法,提出2 种新的模型:粒子群优化-SVM 和遗传算法-SVM。通过2 种优化算法对SVM 模型中的核函数进行优化,从而提高异常检测精度。
基于SVM 的异常检测方法虽然简单易为实现,但是随着UAV 的不断发展,执行任务的多种多样,发生的异常情况也越来越复杂,数据成本提高,很难用SVM 训练出具有很好鲁棒性的分类器,因此基于SVM 的算法逐渐不适用于如今的异常检测。
2. 1. 2 基于KNN 的方法
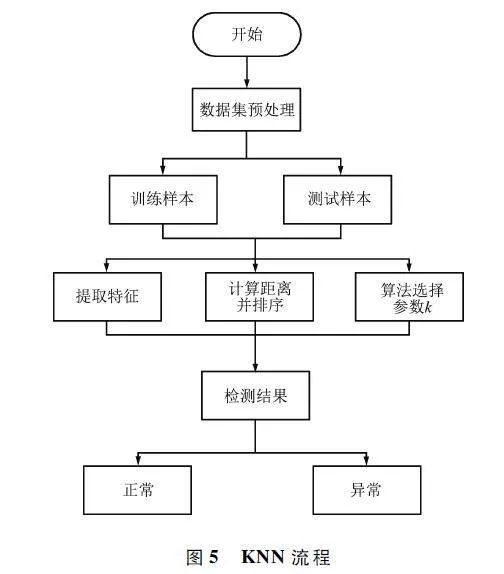
KNN 算法如图5 所示,是非参数分类算法之一[31],其主要思想是通过使用数据集中的属性和样本,应用特征距离来预测即将到来的样本与训练集中的点的接近程度,它将要素距离最近的样本分类到特定类别中[32]。KNN 算法通过从查询的训练数据集中查找最近的数据点或邻居来发挥作用。根据与查询点最近的距离找到最近的数据点。在找到k 个最近的数据点后,它会执行多数投票规则来查找出现最多的类。出现最多的类被裁定为查询的最终分类[33]。KNN 算法的实现简单、功能强大、具有很好的鲁棒性、无需估计参数,但是需要较大的内存空间是该方法的缺点之一,并且随着数据量的增加,处理负荷和计算成本会随之增加,计算所需要的时间较长。
Altinors 等[34]提出一种基于声学的方法来检测UAV 的螺旋桨、偏心轮和轴承的异常。该方法首先对在不同情况下收集到的声音数据进行归一化处理,从而方便从声音数据中提取特征,之后使用DT、SVM、KNN 算法进行异常检测,并对3 种方法进行比较,发现KNN 和DT 方法更适合用于嵌入式系统中进行实时操作。相比于常规方法从传感器、飞行日志等等的数据集中提取特征,本文从声音角度来实现异常检测,通过对正常的声音进行处理,当出现异常时,声音会发生变化,从而实现异常检测。该方法为异常检测提供了多元化的检测方法,但是需要预先对正常状态下的声音进行标注,而在UAV 飞行处于复杂飞行环境时,收集到的声音可能会包含环境声音,检测准确度会大大降低。
UAV 在飞行时,各个子系统和传感器传回的数据往往是不均衡的,针对飞行数据不均衡的问题,Bao 等[35]使用合成少数过采样(Synthetic MinorityOver-sampling Technique,SMOTE)算法对数据进行放大,解决数据不平衡导致的过拟合。由于SMOTE算法会产生噪声数据,因此使用长短期记忆(LongShort-Term Memory,LSTM)网络进行筛选出有效样本,使用KNN 算法进行判别,从而有效提高性能和分类的准确性。该方法可以应用于传统的机器学习模型,与各种混合策略相结合,具有相对较高的准确率和分类性能。但是其主要还是通过集成的方法,整体过程冗长,需要的数据集中带有标签,无法实现在线检测。
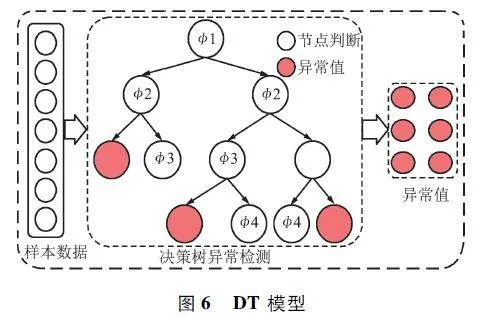
2. 1. 3 基于DT 的方法
DT 模型如图6 所示。
DT 计算速度较快,能够处理嘈杂的数据。DT算法通过对数据深度挖掘实现异常检测,而且相对简单,易于在系统中实现,不需要额外设备,成本相对较低,可以通过剪枝算法删除节点的分支,实现更快的分类,提高DT 的正确选择能力[36]。
Alos 等[37]提出一种新颖的矩阵平台,用于检测UAV 上下文异常。该算法由多个C4. 5 决策树组成,避免了在具有多属性大型数据集的情况下,使用多个DT 时造成的算法冗长以及耗时的问题。首先考虑到先前数据对上下文故障的影响,在训练阶段和测试阶段使用滑动窗口;之后对每个UAV 的属性分配一个DT,构建DT 矩阵;最后通过读取滑动窗口的值,实现UAV 上下文异常的检测。
舒畅等[38]提出一种基于小波特征提取和梯度提升决策数的UAV 异常检测,首先使用小波分析具有良好的时频分析能力[39],以及良好的自适应能力提取特征向量。之后采用梯度提升DT 的智能算法训练模型。最后将两部分整合,从而达到UAV 的异常检测。该方法与其他方法进行集成,得到一个很好的异常检测结果,但是由于是集成方式,实时性不高,尤其是在数据量多、数据维度高时很难在实际中达到一个及时准确的要求。Kraiem 等[40]提出了一种修改后的组合DT 算法,通过标签组合生成异常检测规则。使用不同的模式标记显着点,根据这些标签的组合构建DT。张洪海等[41]提出一种基于隐马尔可夫和DT 的一种UAV 异常检测方法,该算法结合2 种模型的优点,具有较低的时间复杂度,可以实时检测UAV 异常并识别异常类型,可适用于其他UAV 型号具有较好的泛化性。该算法需要相应带有标签的数据,同时只适用于一些相对简单的场景,不适用于数据的维数变高、数据量较多的情况。
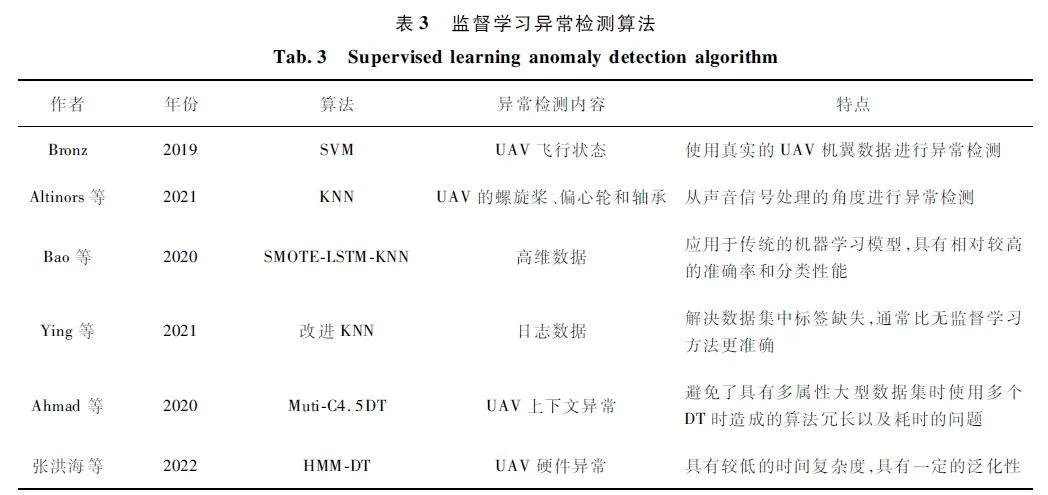
由于监督学习所要求的数据集具有标签,部分算法的精确度不高,应用场景较为简单,不适合UAV 复杂场景的变换,因此基于监督学习的UAV异常检测并不流行。相比于监督学习的异常检测,无监督学习方法的异常检测使用更多[42]。监督学习异常检测算法如表3 所示。
2. 2 基于半监督学习的方法
在实际中,采集到的UAV 数据量和种类繁多,对其进行标注需要专家人员和专门的设备,会耗费大量的时间与精力。对收集到的数据进行少量打标,所需设备和人力并不多。因此可以考虑带有标签的数据和无标签数据的协同训练模型———半监督学习[43]。半监督学习理论最早在1992 年提出[44]。
半监督学习是另一种旨在减轻注释负担的学习方法[45],在多年以前被广泛研究,大多数方法是基于假设,例如平滑度、一致性、密度和聚类等。最近一些研究表明,通过在数据集上添加少量的标签,可以很好地提高算法性能[46-47]、加快模型的收敛速度[48]。但是由于没有从带有标签的数据集中完全捕获信息,因此,此类解决方案与其监督学习的算法之间存在性能差异。半监督学习的一个潜在问题是将学习的模型过度拟合到一小组标记的目标数据中,因此需要改进模型泛化[45],同时也存在训练期间的可靠性有限的问题:由于真实标签仅提供给其配对的标记图像,未标记的数据无法从明确的专家检查监督中受益[49]。
半监督学习是无监督学习和监督学习的混合体,使用标记数据和未标记实例的信息来学习分类。因此半监督学习方法的目标函数具有两部分。第一是监督部分:数据集中带有标签数据的最小化经验误差。第二是无监督部分:最小化特征空间中所有数据点的平滑误差[50]。其学习思路可以概括为3 步:第一步是标记数据的集中增强;第二步是未标记数据集合的自我探索;第三步是从标记集到未标记集的知识转换[51]。在UAV 异常检测方面,半监督学习算法与监督学习和无监督学习类似,但是由于在获取UAV 相关数据方面的特殊性,因此在UAV 异常检测方面使用半监督学习较少,目前主流的UAV 异常检测算法为无监督学习。
Pan 等[52]针对UAV 传感器标记数据少以及未标记的信息无法很好地表示时序序列的分布的问题,提出一种结合主动学习与半监督学习的异常检测算法。Feng 等[53]针对数据样本不平衡问题,利用样本不平衡数据训练生成对抗网络,当异常数据与正常数据达到平衡时,异常检测准确率最高,该方法具有较好的抗噪性能。针对大多数异常检测中难以找到最佳阈值的问题,汪子璇等[54]提出一种无需阈值的半监督异常检测方法,该方法是基于自编码的异常检测方法,通过设置2 个解码器,对未标记数据的损失大小做比较,从而判断是否发生异常。Zhang 等[55]提出一种用于系统日志数据中的半监督异常检测方法,该方法主要从日志中挖掘数值关系,当训练集较小时,也可以获得与现有监督和无监督方法相当的结果。
2. 3 基于无监督的方法
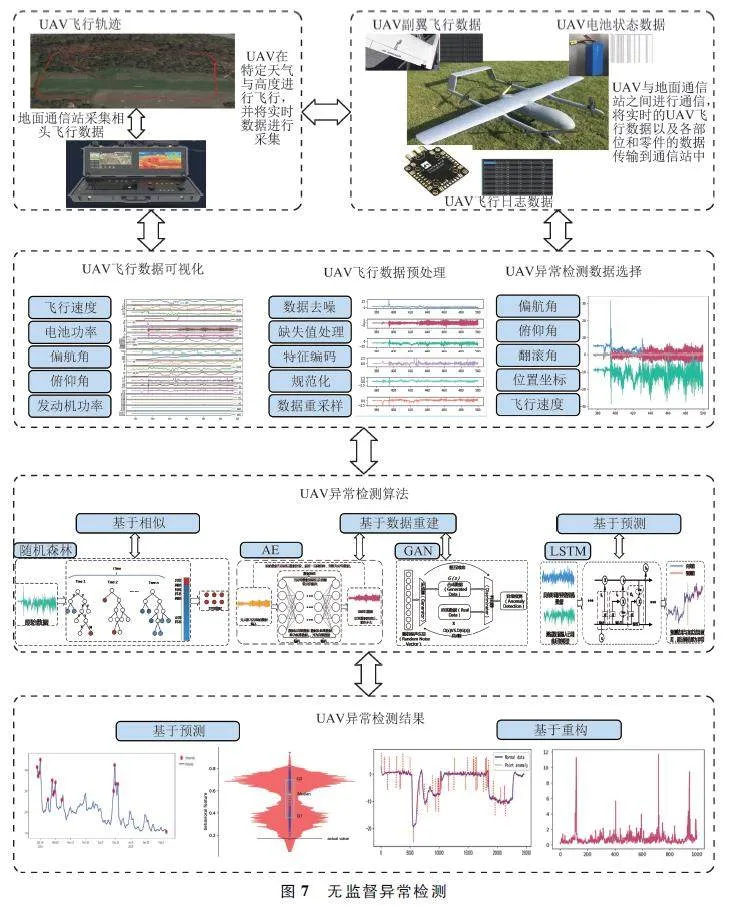
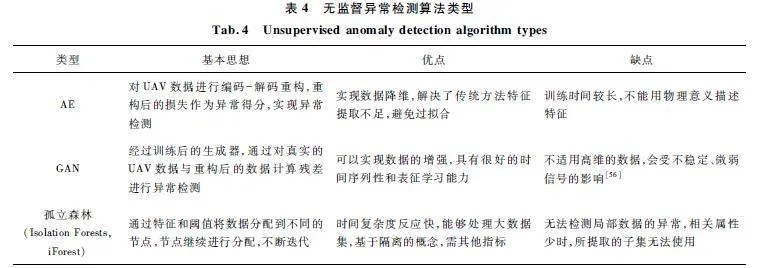
由于监督学习的不可预测性和获取异常样本的困难,其在异常检测领域使用有限,而近年来无监督算法在异常检测领域取得了很好的效果,因此使用越来越广泛,无监督异常检测算法如图7 所示。常见的无监督方法有:自编码器(AutoEncoder,AE)、生成式对抗网络(Generative Adversarial Network,GAN)、LSTM 网络等,其优缺点如表4 所示。
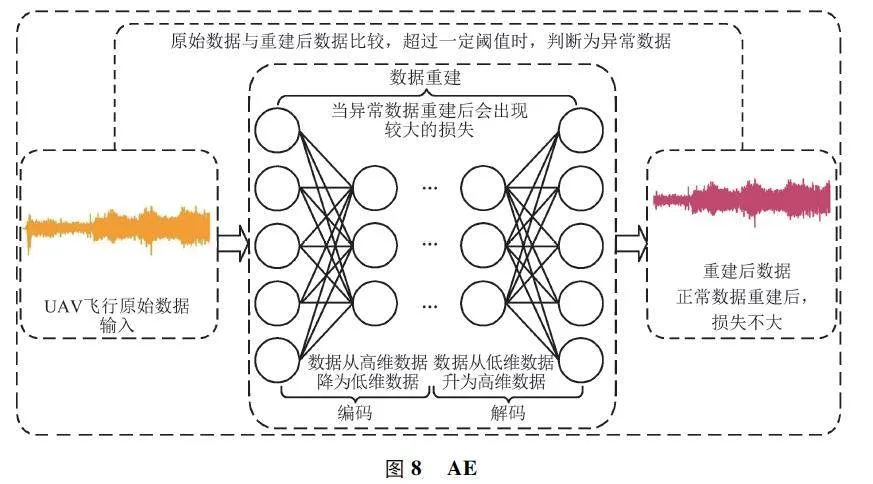
2. 3. 1 基于AE 的异常检测
如图8 所示,AE 是一种典型的无监督特征提取器,是由一个输入层、一个输出层和几个隐藏层组成的对称神经网络[57],输入层为编码器网络,输出层为解码器网络,通常隐藏层比输入层和输出层的神经元要少[58]。其主要目标是最小化模型输入与输出之间的损失[59],在编码阶段应用数据的变换降低了维度,解码阶段将数据恢复为原始维度,因此具有良好的重建数据的能力。
Bell 等[60]提出一种基于LSTM 深度学习AE 的方法,在编码阶段与解码阶段均与LSTM 模型相结合。之后提出一种新的动态阈值算法和加权损失函数,通过从先前的数据当中确定当前数据的阈值,对不同部分的损失分别赋予不同的权重,从而确定最后的损失函数。Azzalini 等[61]提出一种新的变分自编码器(Variational AutoEncoder,VAE)和一种新的训练方法,首先将一维的卷积神经网络和双向LSTM 网络与编码层和解码层相结合;之后使用基于增强训练集的增量方式进行训练,并通过引入一个基于进度的潜在空间;最后实现在线与离线的检测。
Cheng 等[62]针对AE 在有噪声污染的数据中和在数据重建过程中最小化重建误差并不一定是最大化异常检测性能的问题,提出一种用于无监督学习的改进AE,将深度支持向量数据描述的损失合并到自动编码器框架中,而2 个进程可以相互协商以完成学习任务,该方法用到特征空间中质心的距离作为一种新的异常评分策略,从而获得更好的异常检测性能和很好的稳定性,但是该方法在一些较为复杂的数据集上没有明显的准确率提升。
AE 异常检测准确率与数据重建情况和数据有关,因此采用其他方法对数据先一步处理,并将编码阶段和解码阶段与其他算法相结合可以得到很好的结果,但是其训练时间较长,未来应在保证准确率的情况下,提升训练效率。
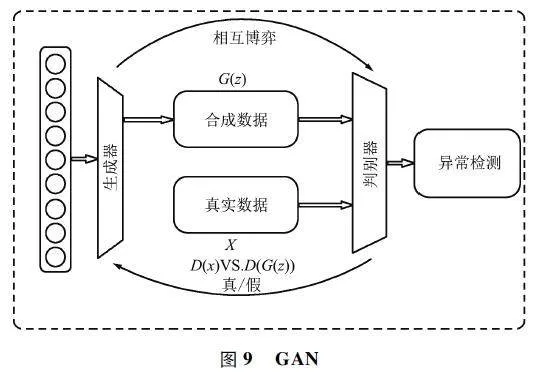
2. 3. 2 基于GAN 的异常检测
GAN[63]在2014 年被提出。如图9 所示,GAN同时训练2 个深度神经网络模型:生成模型G 捕获数据分布,判别模型D 估计样本来自于训练数据而不是G 的概率。G 的训练过程是最大限度地提高D出错的概率,GAN 通过生成器与判别器之间的相互博弈来获得一个很好的结果输出。近年来因GAN有很好的时间序列性,因此被用来做异常检测。
Wang 等[64]提出基于异常检测与异常累积的两阶段异常检测方法,首先通过GAN 生成具有标签的样本,在生成器中用卷积神经网络提取全局特征、局部特征,使用AE 将时间序列重构,判别器根据多个变量之间的相关性和时间依赖性对多元时间序列进行分类;其次通过异常检测累积将CTGAN 中得到的异常分数进行累计;最后使用LSTM,对不同时间的异常分数进行赋权。该方法提供了很好的异常检测的可解释性,同时将多个变量之间的相关性和时间序列的时间依赖性考虑在内。Xu 等[65]针对数据中缺乏定义与标签、计算成本高等问题,提出一种基于Transformer 的GAN 的异常检测框架,通过Trans-former 关注到数据中的上下文特征,从而实现高精度的异常检测,但是没有考虑到真实的数据中含有噪声数据,会对检测结果造成影响。王凤芹等[66]提出一种LSTMGAN 的UAV 异常检测算法,结合2 种算法的优点来实现异常检测。利用GAN 来处理数据,从而减少LSTM 对数据的敏感性和过拟合问题;使用LSTM 网络来捕获数据之间的事件相关性和交互作用。该算法所需检测时间较长,无法实现实时在线检测。
GAN 通过相互博弈提供了一种新的获取数据间标签的方法,但是会受到其他微弱的信号影响,因此需要提高GAN 运行时的稳定性。
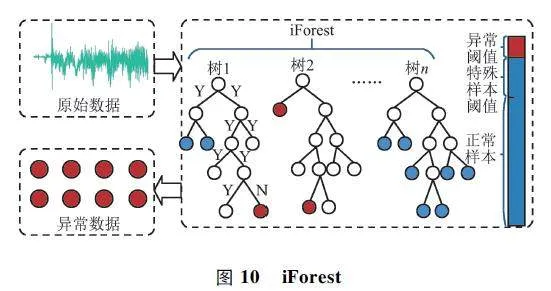
2. 3. 3 基于iForest 的异常检测
iForest 算法如图10 所示,不依靠距离和密度的方式来检测异常,同时其具有线性时间复杂度、较小的常数和较小的内存需求[67]。iForest 通过随机超平面拆分数据空间来隔离异常值,反映异常值易于被孤立的特征[68]。该算法通常包括2 个阶段:训练阶段和孤立阶段[69]。iForest 算法对数据的时间复杂度反应非常快,使其能够有效地处理大数据集[70],但是无法检测到局部数据的异常,当相关属性较少时,所提取的子集无法被用来异常检测以及当异常数据被正常数据所包围时,异常数据会被归为正常数据。该算法在高维海量数据集中局部异常检测精度会降低[71]。
吕少岚等[72]针对iForest 算法所具有的不足提出集成iForest 算法,将扩展iForest、分片选择准则iForest 和公平分割森林相结合,以满足对UAV 异常检测的要求。但是由于该算法集成了多种算法,导致整个算法与单个算法相比更为冗长。
Zhao 等[73]提出一种基于iForest 的异常检测算法,实现了高精度的异常检测。Zhang 等[74]提出一种特征融合和iForest 算法的异常检测方法。首先通过滑动窗口将数据进行划分,并提取样本中的所需的各种特征;之后使用主成分分析法进行特征降维;最后,把降维后的数据输入到iForest 中从而实现异常检测,在具有噪声干扰的数据中具有很好的抗干扰性。针对UAV 各种飞行姿态特征复杂的问题,唐立等[75]提出一种基于改进iForest 算法的UAV 异常检测,首先对合作型与非合作型的UAV 运行参数进行分析,随后提出基于索贝尔算子与卷积神经网络的UAV 类型判定方法,最后提出动态最大生长高度的改进iForest 算法,通过数据节点判断UAV 的异常类型。
使用基本的iForest 算法不能得到很好的检测精度,因此目前使用的iForest 算法均是改进后或是集成后,从而可以改进算法中的不足,更好地应对各种数据情况,实现异常检测精度的提高。
2. 3. 4 基于LSTM 网络的异常检测
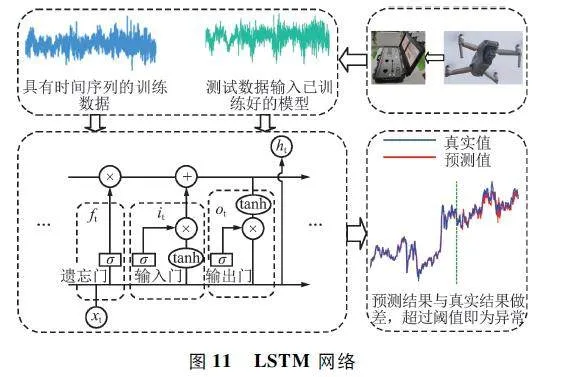
LSTM 网络在1997 年首次被提出,是基于循环神经网络(Recurrent Neural Network,RNN)而提出的一种时间递归神经网络。一个LSTM 网络单元由输入门、输出门和遗忘门组成[76]。LSTM 通过引入常量传递误差单元来解决RNN 算法中方向传播算法存在的梯度爆炸和梯度消失的现象[77]。因其独特的设计结构,LSTM 很适合用于处理时间序列数据的异常检测。UAV 运行过程中产生的传感器数据是典型的时间序列,包含有关UAV 运行状态和异常状态的信息。基于时间序列预测的异常检测算法可以根据历史信息提前给出下一次预测结果,如果结果与实际传感器数据偏差较大,此时UAV 可能出现异常[78]。LSTM 的异常检测流程如图11 所示。
李晨等[79]提出一种将LSTM 与一类支持向量机(One Class SVM,OCSVM)结合的UAV 传感器数据异常检测。首先使用LSTM 对输入的传感器时间序列数据进行预测,并与真实值作差。将得到差值序列的数据输入到OCSVM 中,之后计算差值序列到超平面的距离,从而实现UAV 传感器的异常检测。但是该方法对微小变化不易察觉,同时由于操作指令的改变,可能会造成错误检测,且只能离线检测,不能做到实时检测。
Wang 等[80]提出基于改进的LSTM 的模型,用于实现对分布多样的时间序列数据的精确预测。首先使用非参数无监督学习从数据中确定异常检测的错误阈值,在LSTM 模型中将输入门与遗忘门进行耦合;之后使用改进的LSTM 模型,得到预测值;最后将得到的预测值与设备传感器测量的实际值进行比较,生成误差值,与阈值进行比较,从而确定异常是否发生。这方法均只使用了LSTM 模型进行异常检测,相比于其他集成方式,大大减少了异常检测的时间,并且阈值是从数据中得到的,因此阈值具有很好的客观性。
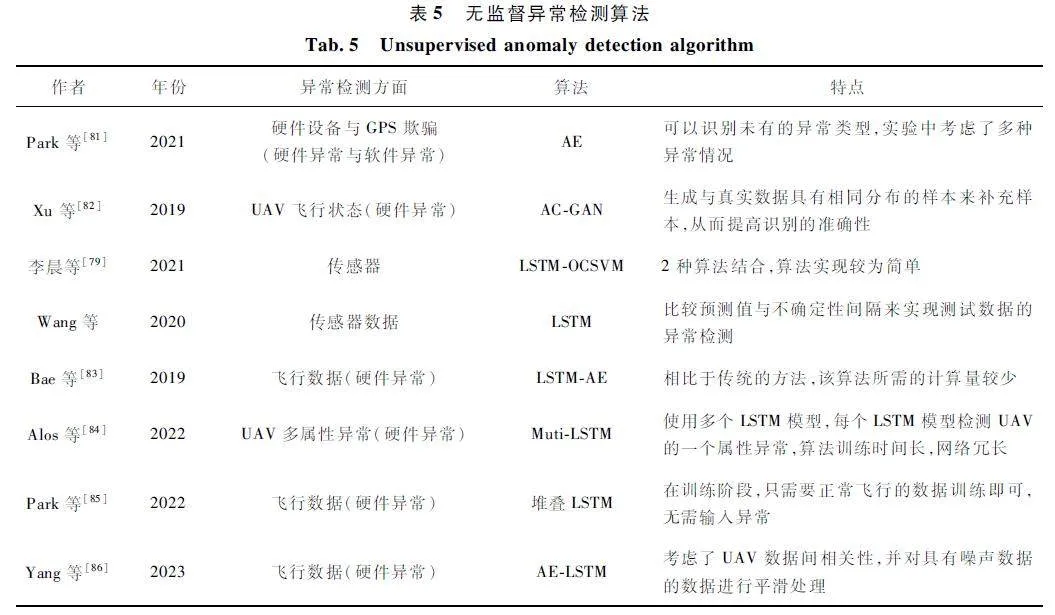
无监督学习的异常检测方法不需要标签,成本低,利用算法本身从数据集中找到隐藏的模式和见解,但是会受到数据中噪声的影响,从而造成检测精度的下降。由于无监督算法往往是网络结构,需要训练网络,所需要时间较长、实时性较差。无监督异常检测算法对比如表5 所示。
3 发展趋势
近年来随着机器学习和数据发掘的不断发展,基于监督学习的方法已经逐渐不适用于UAV 的异常检测。UAV 异常检测的发展趋势是要与无监督的方法相结合,更加注重于从没有标签的数据集中挖掘更多的属性。未来的发展也是面临着许多的挑战。
① 小样本学习在UAV 异常检测方面的应用。由于在真实环境下绝大部分UAV 是正常飞行的,因此获得的UAV 数据是分布不均衡的,异常数据往往只占少部分;同时获得的数据缺少标签,人工标注成本高。而小样本学习可以通过相对较少的样本,实现高精度的检测[87]。未来发展方向也可以是无监督学习,用于解决数据中标签缺少、标签标记困难等。
② 提高异常检测算法的抗噪性能。由于UAV在执行任务时,其所属环境是多变的;当UAV 遇到特殊情况时,获得的信息繁多、信息数据大,噪声难以避免,会在一定程度上影响异常检测算法的准确性。因此,UAV 异常检测在未来发展方向可以针对复杂工况,通过及时处理数据以及异常之间的关系[20],实现高精度的异常检测。
③ 提高异常检测算法的实时性,实现在线监测。目前UAV 的飞行状态依赖于地面控制站,无法满足自主和安全飞行的时间要求[88]。许多算法是离线检测,而真正的UAV 飞行时的异常检测系统则需要能够实时进行异常检测,以便及时采取相应的措施。目前大多数算法,在具有高精度异常检测能力的同时,计算过程较为复杂,所需时间较长,无法实现实时的检测。而具有实时检测的算法异常检测的精度不高,可能造成错误检测。因此未来发展方向应是轻量化、高精度的算法,在实现高精度异常检测时,具有较好的实时性。
④ 提高UAV 异常检测算法的泛化性能。如今大多数算法是只对UAV 某一种异常进行检测,而UAV 可能发生的异常类型较多,因此要提高算法的泛化性能,可以实现对UAV 多类型的异常检测。
⑤ 探索更深程度数据与数据间的信息。如今可获得的UAV 数据以及UAV 数据种类越来越多,因此从不同数据类型中探索更深程度的信息,可以实现UAV 异常检测,提高异常检测的准确率。
4 结束语
随着UAV 执行任务的复杂性和困难性的提高,其安全飞行面临着巨大挑战。UAV 的异常检测技术在降低故障异常、减少经济损失和确保任务完成等方面起到了重要的作用。因此,本文首先从UAV故障异常的特性进行分析和归类,并阐述了异常数据的特点;其次,总结了国内外异常检测算法的研究现状,辨析了各种异常检测算法的优缺点;最后,从数据可用性、算法的抗噪性、实时性和泛化性等方面,指出了未来的发展趋势。旨在为进一步开展相关研究提供参考。
参考文献
[1] 张帅,张鑫,李志华. 系留多旋翼无人机及其军事应用[J]. 中国军转民,2021(9):67-70.
[2] 杜梦瑶,许凯,张淼,等. 基于区块链的无人机群可靠应急搜救模型[J]. 系统仿真学报,2023,35 (12 ):2537-2549.
[3] 王军志. 植保无人机在玉米病虫害防治中的应用[J].农业开发与装备,2022(9):28-30.
[4] 何复亮,李国桥. 矿区测量中无人机航空摄影测量技术的应用[J]. 世界有色金属,2022(13):22-24.
[5] 周勋. 无人机拍摄在电视新闻节目中的应用[J]. 数字技术与应用,2022,40(2):13-15.
[6] DU C Y,ZHANG X Y,ZHONG R,et al. UnmannedAerial Vehicle Rotor Fault Diagnosis Based on IntervalSampling Reconstruction of Vibration Signals and a Onedimensional Convolutional Neural Network Deep LearningMethod[J]. Measurement Science and Technology,2022,33(6):065003.
[7] ZHANG Y M,CHAMSEDDINE A,RABBATH C A,et al.Development of Advanced FDD and FTC Techniques withApplication to an Unmanned Quadrotor HelicopterTestbed[J]. Journal of the Franklin Institute,2013,350(9):2396-2422.
[8] GAO Y P,ZHAO D,LI Y B. UAV Sensor Fault DiagnosisTechnology:A Survey[J]. Applied Mechanics and Materials,2012,220-223:1833-1837.
[9] 祁超帅,何文思,焦毅,等. 无人机飞行数据异常检测算法综述[J]. 计算机应用,2023,43(6):1833-1841.
[10] ZHAO M,CHEN J C. A Review of Methods for DetectingPoint Anomalies on Numerical Dataset[C]∥2020 IEEE4th Information Technology,Networking,Electronic andAutomation Control Conference (ITNEC ). Chongqing:IEEE,2020:559-565.
[11] 彭喜元,庞景月,彭宇,等. 航天器遥测数据异常检测综述[J]. 仪器仪表学报,2016,37(9):1929-1945.
[12] 蔡颖,陈伟荣. 基于改进主动学习的异常检测算法[J]. 计算机工程与设计,2022,43(11):3057-3062.
[13] KEIPOUR A,MOUSAEI M,SCHERER S. ALFA:ADataset for UAV Fault and Anomaly Detection [J]. TheInternational Journal of Robotics Research,2021,40 (2 /3):515-520.
[14] TAYLOR B. Thor Flight 111[DB / OL]. (2014 -05 -04)[2023-07-31]. https:∥conservancy. umn. edu / handle /11299 / 174236.
[15] WHELAN J. UAV Attack Dataset[DB / OL]. [2023-07-31]. https:∥ ieeedataport. org / openaccess / uavattackdataset.
[16] RAZA S N,MAUD A R M,BHATTI F A,et al. Hyperspectral Anomaly Detection:A Performance Comparison ofExisting Techniques [J]. International Journal of DigitalEarth,2022,15(1):2078-2125.
[17] 贾统,李影,吴中海. 基于日志数据的分布式软件系统故障诊断综述[J]. 软件学报,2020,31(7):1997-2018.
[18] CHOI K,YI J,PARK C,et al. Deep Learning for AnomalyDetection in Timeseries Data:Review,Analysis,andGuidelines[J]. IEEE Access,2021,9:120043-120065.
[19] PANG G S,SHEN C H,CAO L B,et al. Deep Learningfor Anomaly Detection:A Review [J]. ACM ComputingSurveys,2021,54(2):1-38.
[20] 苗建国,王剑宇,张恒,等. 无人机故障诊断技术研究进展概述[J]. 仪器仪表学报,2020,41(9):56-69.
[21] 张鹏,田子都,王浩. 基于改进生成对抗网络的飞参数据异常检测方法[J]. 浙江大学学报(工学版),2022,56(10):1967-1976.
[22] CHANG C I. Targettoanomaly Conversion for Hyperspectral Anomaly Detection [J]. IEEE Transactions on Geoscience and Remote Sensing,2022,60:1-28.
[23] 樊港辉,马泳,梅晓光,等. 空域协同自编码器的高光谱异常检测[J]. 中国图象图形学报,2022,27 (10):3116-3126.
[24] KUNJUMON A,MADHU A,KIZHAKKETHOTTAM J J.Comparison of Anomaly Detection Techniques In Networks[C ]∥ 2015 IEEE International Conference on SoftComputing and Networks Security (ICSNS 2015). Coimbatore:IEEE,2015:1-3.
[25] LOVE B C. Comparing Supervised and Unsupervised Category Learning[J]. Psychonomic Bulletin & Review,2002,9(4):829-835.
[26] PLATT J C,PLATT J,PLATT J P,et al. ProbabilisticOutputs for Support Vector Machines and Comparisons toRegularized Likelihood Methods [J]. Advances in LargeMargin Classifiers,1999,10(3):61-74.
[27] RASHIDI H H,TRAN N K,BETTS E V,et al. ArtificialIntelligence and Machine Learning in Pathology:ThePresent Landscape of Supervised Methods[J]. AcademicPathology,2019,6:2374289519873088.
[28] FAN L M,KANG C,WANG H G,et al. AdaptiveMagnetic Anomaly Detection Method Using SupportVector Machine [J ]. IEEE Geoscience and RemoteSensing Letters,2020,99:1-5.
[29] DING N,MA H X,GAO H B,et al. Realtime AnomalyDetection Based on Long ShortTerm Memory andGaussian Mixture Model [J]. Computers and ElectricalEngineering,2019,79:106458.
[30] DUO R F,NIE X B,YANG N,et al. Anomaly Detectionand Attack Classification for Train Realtime Ethernet[J]. IEEE Access,2021,9:22528-22541.
[31] HAN Y,ZOU Z Q,LI N,et al. Identifying Outliers in Astronomical Images with Unsupervised Machine Learning[J]. Research in Astronomy and Astrophysics,2022,22(8):085006.
[32] LIU Z Y,LI S X,HAO J L,et al. An Efficient and FastModel Reduced Kernel KNN for Human Activity Recognition[J]. Journal of Advanced Transportation,2021,2021:1-9.
[33] UDDIN S,HAQUE I,LU H H,et al. Comparative Performance Analysis of Knearest Neighbour (KNN)Algorithm and Its Different Variants for Disease Prediction[J]. Scientific Reports,2022,12(1):6256.
[34] ALTINORS A,YOL F,YAMAN O. A Sound BasedMethod for Fault Detection with Statistical Feature Extraction in UAV Motors [J ]. Applied Acoustics,2021,183:108325.
[35] BAO F G,WU Y Q,LI Z G,et al. Effect Improved forHighdimensional and Unbalanced Data AnomalyDetection Model Based on KNNSMOTELSTM[J]. Complexity,2020,2020:9084704.
[36] ZHOU F,CHENG Y Y,DU J,et al. Construction of Multidimensional Electric Energy Meter Abnormal DiagnosisModel Based on Decision Tree Group [C]∥2019 IEEE8th Joint International Information Technology andArtificial Intelligence Conference (ITAIC). Chongqing:IEEE,2019:1687-1691.
[37] ALOS A,DAHROUJ Z. Decision Tree Matrix Algorithmfor Detecting Contextual Faults in Unmanned Aerial Vehicles[J]. Journal of Intelligent & Fuzzy Systems,2020,38(4):4929-4939.
[38] 舒畅,李辉. 基于小波与GBDT 的无人机传感器故障诊断[J]. 测控技术,2017,36(8):41-46.
[39] 徐志成,王宏,徐长英,等. 基于优选小波基和模糊SOM 网络的模拟电路故障诊断[J]. 测控技术,2016,35(11):5-8.
[40] KRAIEM I B,GHOZZI F,PENINOU A,et al. AutomaticClassification Rules for Anomaly Detection in Timeseries[C]∥14th International Conference. Limasol:Springer,2020:321-337.
[41] 张洪海,周锦伦,于文娟,等. 基于HMM 和DT 的无人机异常检测方法[J]. 中国安全生产科学技术,2022,18(3):193-198.
[42] NASSIF A B,TALIB M A,NASIR Q,et al. MachineLearning for Anomaly Detection:A Systematic Review[J]. IEEE Access,2021,9:78658-78700.
[43] BLUM A,MITCHELL T. Combining Labeled and UnlabeledData with Cotraining[C]∥Proceedings of the 11th AnnualConference on Computational Learning Theory. New York:ACM,1998:92-100.
[44] MERZ C J,CLAIR D C,BOND W E. SeMisupervisedAdaptive Resonance Theory (SMART2 ) [C ] ∥International Joint Conference on Neural Networks. Baltimore:IEEE,1992:851-856.
[45] CHEN Y,OUYANG X,ZHU K Y,et al. SemisupervisedDualdomain Adaptation for Semantic Segmentation[C]∥2022 26th International Conference on Pattern Recognition(ICPR). New York:LEEE,2022:230-237.
[46] KIM T,KIM C. Attract,Perturb,and Explore:Learning aFeature Alignment Network for Semisupervised DomainAdaptation [C]∥ 16th European Conference. Glasgow:ACM,2020:591-607.
[47] YANG L Y,WANG Y,GAO M F,et al. Deep Cotrainingwith Task Decomposition for Semisupervised Domain Adaptation[C]∥2021 IEEE / CVF International Conferenceon Computer Vision. Montreal:IEEE,2021:8886-8896.
[48] SPURR A,AKSAN E,HILLIGES O. Guiding InfoGANwith Semisupervision [C ]∥ Machine Learning andKnowledge Discovery in Databases. Skopje:Springer,2017:119-134.
[49] XU Z,WANG Y X,LU D H,et al. Allaround Real LabelSupervision:Cyclic Prototype Consistency Learning forSemisupervised Medical Image Segmentation [J]. IEEEJournal of Biomedical and Health Informatics,2022,26(7):3174-3184.
[50] NUNNA S K,BHATTU S N,SOMAYAJULU D V L N,et al. Structuresensitive Graphbased MultipleinstanceSemisupervised Learning [J ]. SadhanaAcademy Proceedings in Engineering Sciences,2021,46(3):156.
[51] WANG Y D,ZHANG J,KAN M N,et al. Learning PseudoLabels for Semiandweakly Supervised Semantic Segmentation[J]. Pattern Recognition,2022,132:108925.
[52] PAN D W,NIE L Q,KANG W X,et al. UAV AnomalyDetection Using Active Learning and Improved S3VMModel[C]∥2020 International Conference on Sensing,Measurement & Data Analytics in the Era of Artificial Intelligence (ICSMD). Xi’an:IEEE,2020:253-258.
[53] FENG Y,LIU Z J,CHEN J,et al. Make the Rocket Intelligent at IoT Edge:Stepwise GAN for Anomaly Detectionof LRE with Multisource Fusion [J]. IEEE Internet ofThings Journal,2022,9(4):3135-3149.
[54] 汪子璇,关东海,汤丽君,等. 一种竞争自编码器的半监督异常检测方法[J]. 小型微型计算机系统,2023,44(2):319-325.
[55] ZHANG B,ZHANG H Y,LE V H,et al. Semisupervisedand Unsupervised Anomaly Detection by MiningNumerical Workflow Relations from System Logs[J]. Automated Software Engineering,2023,30(1):00370.
[56] SABUHI M,ZHOU M,BEZEMER C P,et al. Applicationsof Generative Adversarial Networks in AnomalyDetection:A Systematic Literature Review[J]. IEEE Access,2021,9:161003-161029.
[57] FAN G H,MA Y,MEI X G,et al. Hyperspectral AnomalyDetection with Robust Graph Autoencoders [J ]. IEEETransactions on Geoscience and Remote Sensing,2022,60:1-14.
[58] XU W,JULIAN J J,SINGH A,et al. ImprovingPerformance of Autoencoderbased Network Anomaly Detection on NSLKDD Dataset[J]. IEEE Access,2021,9:140136-140146.
[59] WANG H T,LIU X W,MA L Y,et al. Anomaly Detectionfor Hydropower Turbine Unit Based on Variational ModalDecomposition and Deep Autoencoder [J ]. EnergyReports,2021,7(S7):938-946.
[60] BELL V,ARCE I M,MASE J M,et al. Anomaly Detectionfor Unmanned Aerial Vehicle Sensor Data Using a StackedRecurrent Autoencoder Method with Dynamic Thresholding[J]. SAE International Journal of Aerospace,2022,15(2):219-229.
[61] AZZALINI D,BONALI L C,AMIGONI F. A MinimallySupervised Approach Based on Variational Autoencodersfor Anomaly Detection in Autonomous Robots [J]. IEEERobotics and Automation Letters,2021,6(2):2985-2992.
[62] CHENG Z,WANG S W,ZHANG P,et al. Improved Autoencoder for Unsupervised Anomaly Detection[J]. International Journal of Intelligent Systems,2021,36 (12 ):7103-7125.
[63] GOODFELLOW I J,POUGETABADIE J,MIRZA M,etal. Generative Adversarial Nets[C]∥ Neural InformationProcessing Systems. Montreal:ACM,2014:2672-2680.
[64] WANG W L,PENG Z H,WANG S Z,et al. IFPADAC:ATwostage Interpretable Fault Prediction Model for Multivariate Time Series[C]∥2021 22nd IEEE InternationalConference on Mobile Data Management (MDM 2021).Los Alamitos:IEEE,2021:29-38.
[65] XU L Y,XU K,QIN Y C,et al. TGANAD:Transformerbased GAN for Anomaly Detection of Time Series Data[J]. Applied Sciences,2022,12(16):8085.
[66] 王凤芹,高龙,徐廷学,等. 基于LSTMGAN 的无人机飞行数据异常检测算法[J]. 中国惯性技术学报,2022,30(2):264-271.
[67] LIU F T,TING K M,ZHOU Z H. Isolationbased AnomalyDetection[J]. ACM Transactions on Knowledge Discoveryfrom Data,2012,6(1):1-39.
[68] SHAO C,DU X S,YU J,et al. Clusterbased ImprovedIsolation Forest[J]. Entropy,2022,24(5):611.
[69] ZHANG Y X,DONG Y N,WU K,et al. HyperspectralAnomaly Detection with Otsubased Isolation Forest[J].IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing,2021,14:9079-9088.
[70] ZHANG X Y,DOU W C,HE Q,et al. LSHiForest:A Generic Framework for Fast Tree Isolation based EnsembleAnomaly Analysis [C]∥ 2017 LEEE 33rd InternationalConference on Data Engineering. New York:IEEE,2017:983-994.
[71] QU H C,LI Z L,WU J J. Integrated Learning Method forAnomaly Detection Combining KLSH and Isolation Principles[C]∥2020 IEEE Congress on Evolutionary Computation (cec). New York:IEEE,2020:1-6.
[72] 吕少岚,王华伟,侯召国,等. 基于集成孤立森林的无人机异常检测算法[J]. 无线电工程,2022,52 (8):1375-1385.
[73] ZHAO W J,ZHANG Y S,ZHU Y,et al. AnomalyDetection of Aircraft Leadacid Battery [J]. Quality andReliability Engineering International,2020,37 (3 ):1186-1197.
[74] ZHANG N,LIU Y F,XU L,et al. Magnetic Anomaly Detection Method Based on Feature Fusion and Isolation Forest Algorithm[J]. IEEE Access,2022,10:84444-84457.
[75] 唐立,郝鹏,任沛阁,等. 基于改进孤立森林算法的无人机异常行为检测[J]. 航空学报,2022,43 (8 ):584-593.
[76] GERS F A,SCHMIDHUBER J,CUMMINS F. Learning toForget:Continual Prediction with LSTM[J]. Neural Computation,2000,12(10):2451-2471.
[77] HOCHREITER S,SCHMIDHUBER J. Long ShortTermMemory[J]. Neural Computation,1997,9(8):1735-1780.
[78] WANG B K,WANG Z Y,LIU L S,et al. DatadrivenAnomaly Detection for UAV Sensor Data Based on DeepLearning Prediction Model [C]∥ 2019 Prognostics andSystem Health Management Conference (PHMParis).Paris:IEEE,2019:286-290.
[79] 李晨,王布宏,田继伟,等. 基于LSTMOCSVM 的无人机传感器数据异常检测[J]. 小型微型计算机系统,2021,42(4):700-705.
[80] WANG Y J,DU X,LU Z H,et al. Improved LSTMbasedTimeseries Anomaly Detection in Rail Transit OperationEnvironments[J]. IEEE Transactions on Industrial Informatics,2022,18(12):9027-9036.
[81] PARK K H,PARK E,KIM H K. Unsupervised Fault Detection on Unmanned Aerial Vehicles:Encoding andThresholding Approach[J]. Sensors,2021,21(6):2208.
[82] XU Y Q,LIANG J,WANG B K,et al. UAV Flight StateRecognition Using ACGAN Based Method [C]∥ 2019Prognostics and System Health Management Conference.Qingdao:IEEE,2019:1-6.
[83] BAE G,JOE I. UAV Anomaly Detection with DistributedArtificial Intelligence Based on LSTMAE and AE[C]∥Advanced Multimedia and Ubiquitous Engineering. Xi’an:Springer,2019:305-310.
[84] ALOS A,DAHROUJ Z. Using MLSTM and MultioutputConvolutional LSTM Algorithms for Detecting AnomalousPatterns in Streamed Data of Unmanned Aerial Vehicles[J]. IEEE Aerospace and Electronic Systems Magazine,2022,37(6):6-15.
[85] PARK J H,SHANBHAG S,CHANG D E. Modelfree Unsupervised Anomaly Detection of a General RoboticSystem Using a Stacked LSTM and Its Application to aFixedwing Unmanned Aerial Vehicle[C]∥2022 IEEE /RSJ International Conference on Intelligent Robots andSystems (IROS). Kyoto:IEEE,2022:4287-4293.
[86] YANG L,LI S B,LI C J,et al. Datadriven UnsupervisedAnomaly Detection and Recovery of Unmanned Aerial Vehicle Flight Data Based on Spatiotemporal Correlation[J ]. Science China Technological Sciences,2023,66(5):1304-1316.
[87] LI C J,LI S B,ZHANG A S,et al. A Siamese HybridNeural Network Framework For Fewshot Fault Diagnosisof Fixedwing Unmanned Aerial Vehicles[J]. Journal ofComputational Design and Engineering,2022,9 (4 ):1511-1524.
[88] WANG B K,CHEN Y F,LIU D T,et al. An EmbeddedIntelligent System for Online Anomaly Detection of Unmanned Aerial Vehicle[J]. Journal of Intelligent & FuzzySystems,2018,34(6):3535-3545.
作者简介
王 岩 男,(1999—),硕士研究生。主要研究方向:无人机、异常检测。
(*通信作者)李少波 男,(1973—),博士,教授。主要研究方向:大数据、智能制造等。
张仪宗 男,(1996—),博士研究生。主要研究方向:机械设备智能故障诊断。
张 羽 男,(1983—),硕士,高级工程师。主要研究方向:无人机试验试飞、导航制导、智能制造、故障诊断与健康管理。
张安思 男,(1991—),博士,讲师。主要研究方向:工业大数据。
