基于快速控制原型的汽车线控转向控制器研究
2024-08-31蒋明朝LIUHenke唐阳张鑫曾贵萍





摘 要:为了提高线性转向控制系统控制性能以及控制系统的快速性、准确性、稳定性,基于快速控制原型技术搭建RCP测试平台,对比不同控制策略对线性转向系统控制性能的影响。通过建立执行电机的数学模型,依据其动态特性逐步设计优化PD控制器、串级三闭环PID控制器以及模糊PID控制器,分析3种控制器的阶跃响应性能。基于dSPACE设计搭建RCP快速原型控制测试平台,分别对控制器的跟随性能进行半实物仿真实验,对比分析控制器的性能优劣。半实物仿真实验结果表明:模糊PID控制策略在转角跟随性能控制中更为优异。
关键词:汽车;线控转向;模糊PID;半实物仿真
中图分类号:TP273文献标志码:A文章编号:1671-5276(2024)03-0229-05
Research on Automotive Wire-controlled Steering Controller Based onRapid Control Prototype
Abstract:In order to improve the control performance of linear steering control system with rapidity, accuracy and stability, this paper builds a RCP test platform based on the rapid control prototype technology, and compares the effects of different control strategies on the control performance of the linear steering system. With the establishment of the mathematical model of the executive motor, the PD controller, cascade three closed loop PID controller and fuzzy PID controller are gradually designed and optimized according to their dynamic characteristics, and the step response performance of the three controllers is analyzed.The RCP rapid prototype control test platform is built based on dSPACE design, the following performance of the controller is tested in semi-physical simulation and the performance advantages and disadvantages of the controller are compared and analyzed. The results show that the fuzzy PID control strategy is superior in the control of corner following performance.
Keywords:car; linear steering; fuzzy PID; semi-physical simulation
0 引言
汽车线控转向系统是在传统转向系统基础上逐渐改进而来的,是由控制器根据采集到的转角及车辆状态信息,经过控制算法控制前轮执行电机输出合适的转角,从而控制车辆行驶方向,因此能够实现方向盘与车轮之间的解耦[1]。这种技术在很大程度上改善了操纵性能并且提升了驾驶的舒适性[2]。
目前针对线性转向系统的控制研究多基于仿真分析,并且在仿真层面提出并验证了多种具有较好效果的控制策略,但真实的被控对象受多种因素影响,因此这些控制策略还需要实物试验的验证[3]。
现有的实物验证控制器开发过多依赖于嵌入式软件,而这种控制方法的缺点在于开发周期长、成本较高。本文基于dSPACE控制平台并引入RCP技术(RCP技术被广泛应用于控制器开发初期)可以更有效地验证控制策略的可行性,调整控制器参数,从而缩短开发周期,提高开发效率,节省开发成本。利用RCP技术实时性高的特点,在不需要开发控制器硬件的前提下对真实的被控对象实现对控制策略的快速验证,有助于在短时间内实现对多种控制策略的验证[4]。
1 半实物仿真试验平台的设计
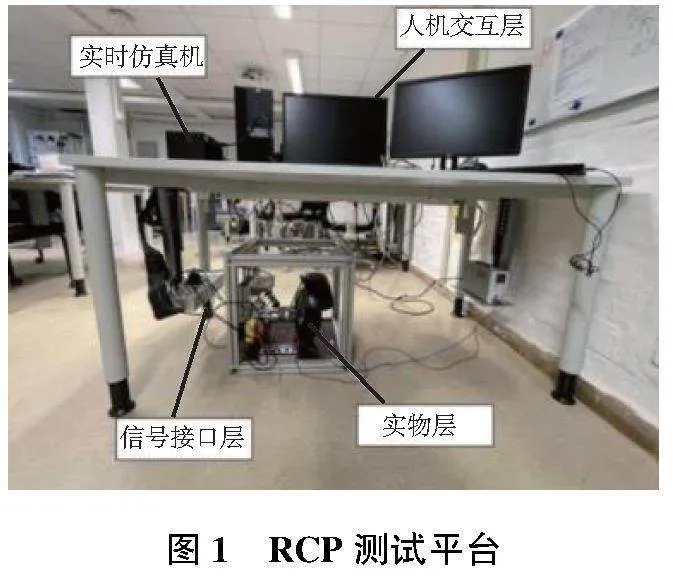
本文设计的RCP测试平台选用的控制设备为dSPACE 1104,基于项目支持,由德方设计并搭建了快速响应控制试验平台[5]。主要由实物层、信号接口层、实时仿真层以及人机交互层4部分构成[6],如图1所示。
1.1 线控转向试验台
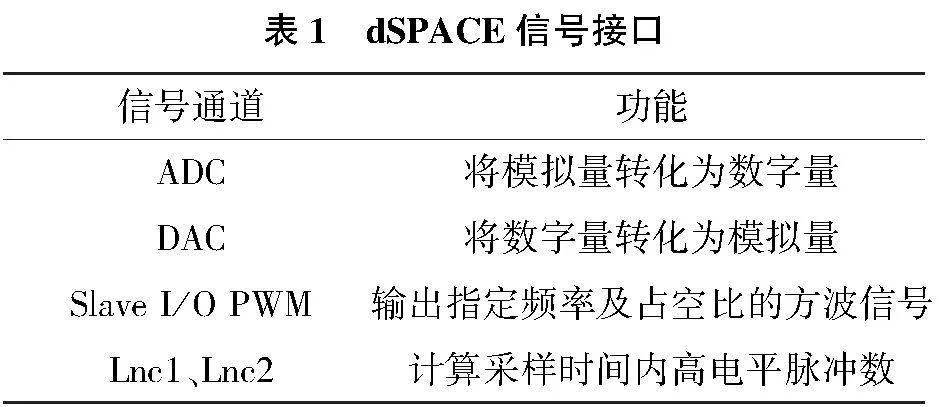
线控转向执行机构试验台如图2所示,可分为3个部分:一是转向驱动部分(执行电机);二是由转向节、横拉杆、转向臂和下摆臂组成的转向执行结构,传动机构类型为曲柄摇杆机构。执行电机受控产生驱动力矩通过转向执行机构将驱动力矩传递到车轮完成指定转向动作;三是转向车轮。转向执行机构由转向臂(曲柄)、横拉杆(连杆)、转向节(摇杆)和下摆臂构成,即执行电机通过对转向臂施加力矩驱动车轮摆动。
1.2 信号接口与dSPACE
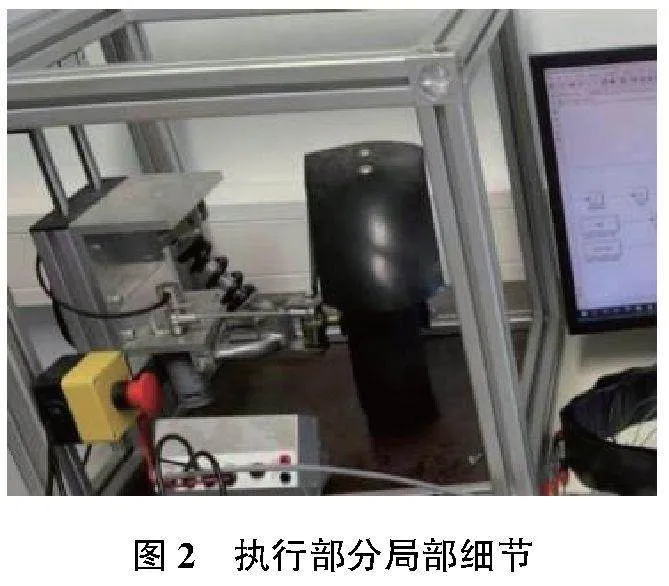
dSPACE 1104单板系统提供符合工业标准的各种接口[7],包括A/D和D/A转换接口、Digital I/O、Slave PWM I/O、增量编码器接口、RS232和RS485通信接口。表1是试验台所使用到的接口及其相应的功能。
本试验台选用RB-35永磁直流电机作为执行电机,选用RN-VNH2调速器作为电机驱动器。驱动器接收幅值为5 V的PWM脉冲信号,通过调节PWM方波信号的占空比实现速度的调节,通过给定高低电平实现方向的调节。另外,该驱动器配备温度检测功能,通过一个输出接口输出模拟电压与控制板温度形成线性关系检测控制板温度。
试验台反馈信号使用编码器检测,选用库伯勒1024线数型增量式编码器dSPACE 1104的编码器接口可以采集TTL或者RS422输出信号,分别以采集总脉冲数以及采样时间脉冲数的形式输出。
1.3 执行电机的等效数学模型的建立
对执行电机的数学模型进行推算,其中电枢回路电压方程为
感应电动势为
E=Ke×n(2)
在空载状态下,转子机械动力学方程为
电机输出转矩为
Te=Kt×ia(4)
式中:Kt为电机转矩常数;Ke为电机电压常数;J为电机转子转动惯量。
经过拉普拉斯变化并带入电机相应参数,依次算出电机输入电压与其输出转速、输出转角以及输出电流的传递函数,如式(5)-式(7)所示。
2 控制器设计
PID控制是现今应用最广泛的控制策略之一。PID控制具有如下优点:1)工作原理较为简单,使用比较方便,可以及时设置PID控制器的参数KP、KI和KD;2)适应性及鲁棒性较强,可改善系统的静态特性。
本文根据输入电压与各输出之间的传递函数,确定本系统设计的目标首先要保证输出稳定,其次具有较好的动态性能以及稳态性能。由此,控制目标设定为在不超过5%超调量的前提下尽可能地减少上升时间。
2.1 单闭环PD控制器设计
PID控制器的输入是理想输出值r(t)与实际输出值y(t)之间的误差e(t),将误差经过比例、积分、微分环节后得到执行电机的输出u(t)。
其中控制器的输入即偏差为
e(t)=r(t)-y(t)(8)
控制器的输出为
不同的比例、积分和微分系数对系统性能有不同的影响。其中PID参数整定基本上有两种方法:一是理论计算整定法,即根据系统的传递函数和设计目标,通过已有的公式反算确定PID控制器的参数。然而该方法较为复杂,并且对系统传递函数的精度要求较高,因此本文不使用该方法;二是工程整定方法,这种方法更多基于工程经验,不需要仿真而在实验中测试,该方法简单实用,使用步骤较为明了,从而在工程实践中得到大量的应用。控制工程中常用的技术整定方法包括临界比例度法和ISTE最优参数整定方法等。
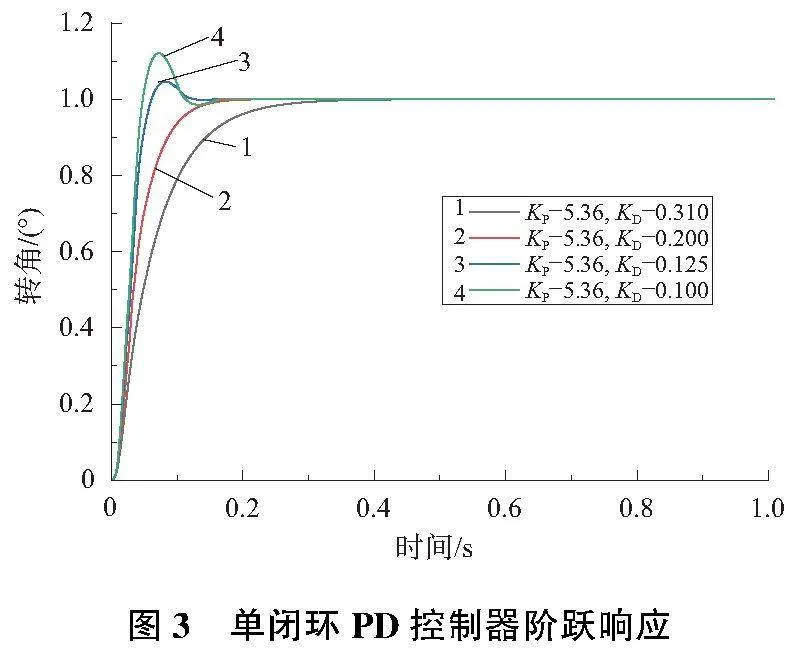
本文使用Ziegler和Nichols提出的临界比例度法进行PID控制器参数整定[8]。根据整定结果确定积分参数为0的PD控制器,在Simulink中搭建输入电压与输出转角的控制系统并进行单位阶跃相应仿真。为更好地对比控制器性能,依据控制器的设计目标在区间范围内对参数进行微调,得到阶跃响应性能对比如图3所示。
从4种参数选定的控制器性能分析中发现,当选择KP=5.36,KD=0.125时,超调量为4.7%,上升时间为0.041s,因此选KP=5.36,KD=0.125作为单闭环PD控制器设计结果。
2.2 串级三闭环PID控制
为了提高响应性能,尝试从内到外设计串级三闭环PID控制策略,即电流环、速度环和位置环。
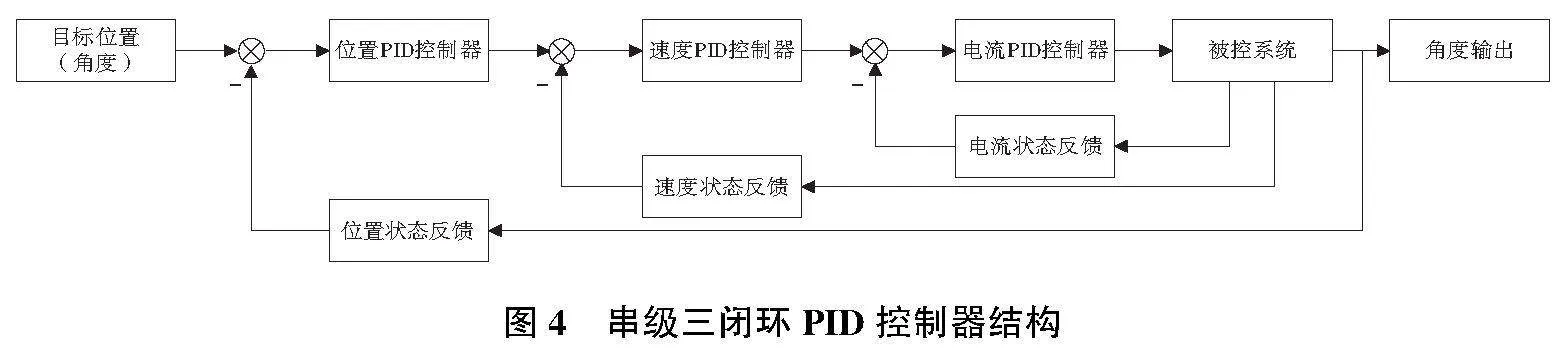
串级三闭环控制系统的设计特点及优点是系统的主故障输入包含在内环中,具有超前控制功能,能有效抑制干扰并尽可能提高响应速度。与单闭环PD控制系统相比,串级三级控制系统具有更高的工作频率、更小的振动周期、更短的调节时间和更快的响应速度。串级三闭环PID控制系统如图4所示。
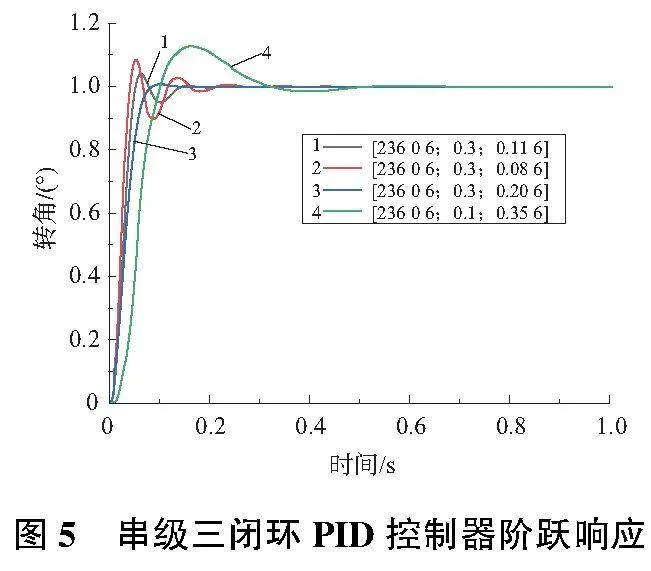
依据临界比例法分别对电流环、速度环、位置环的子控制器进行PID参数整定,选定各子环参数并在区间内进行微调,对比阶跃响应性能如图5所示,图例中[236 0 6;0.3;0.11 6]代表位置环PID控制参数KP=236、KI =0、KD=6;速度环P控制参数KP=0.3;电流环PI控制参数KP=0.11、KI =6。
对比4组选定的PID参数,保证超调量满足需求的情况下,选择电流环KP=0.11、KI=6;速度环KP=0.3;位置环KP=236、KD=6时,上升时间为0.031s,超调量为4.4%。以此作为串级三闭环PID控制策略的设计结果。
2.3 模糊PID控制
串级三闭环控制策略的参数设置过程复杂。为了改善误差并试图进一步提高系统响应性能,基于串级三闭环PID控制器,在最外环上增加了模糊自适应PID控制策略。
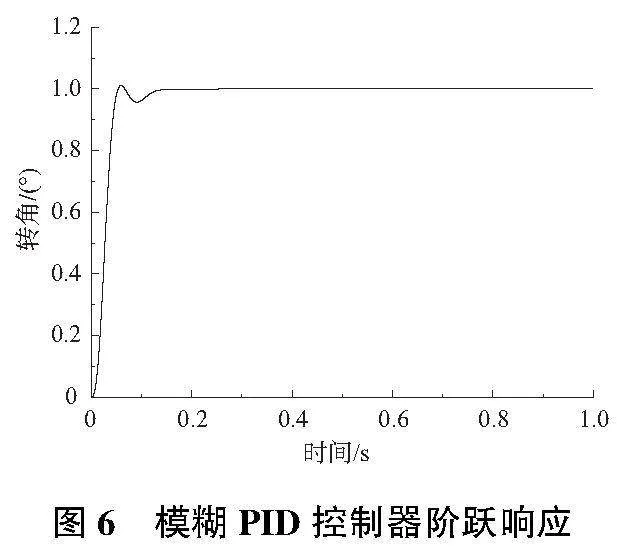
模糊控制器的基本工作原理是将误差信号e作为模糊控制器的输入语言变量,误差e经过模糊后,得到模糊集E,由E和模糊控制规则得到模糊控制变量U,再经过模糊决策、清晰化后输出精确的控制量u来控制被控对象[9]。本文使用二维模糊控制器,将执行电机的实际转动角度与理想角度之间的偏差和及其变化率作为模糊控制器的两个输入变量,并将比例、积分和微分系数的增量作为输出。模糊PID的阶跃响应曲线如图6所示。
可以看到,模糊PID控制器系统阶跃响应超调量是1.5%,上升时间是0.029s,相较于串级三闭环的上升时间有所减小。
为了分析单闭环PD控制策略、串级三闭环PID控制策略和模糊自适应PID控制策略的阶跃响应结果,3种控制策略仿真调试获得相对较优参数的阶跃响应曲线对比如图7所示,结果对比如表2所示。
控制策略的阶跃响应仿真结果表明:把超调量控制在大约5%时,串级三闭环PID控制策略的上升时间较单闭环PD控制策略的上升时间降低了24.39%;模糊自适应PID控制策略的上升时间较串级三闭环PID控制策略的上升时间降低了6.45%。
3 半实物仿真试验
由于仿真测试的局限性,所以本文基于设计的线控转向转角跟踪控制策略RCP测试平台对上文提出的控制器进行半实物仿真试验。
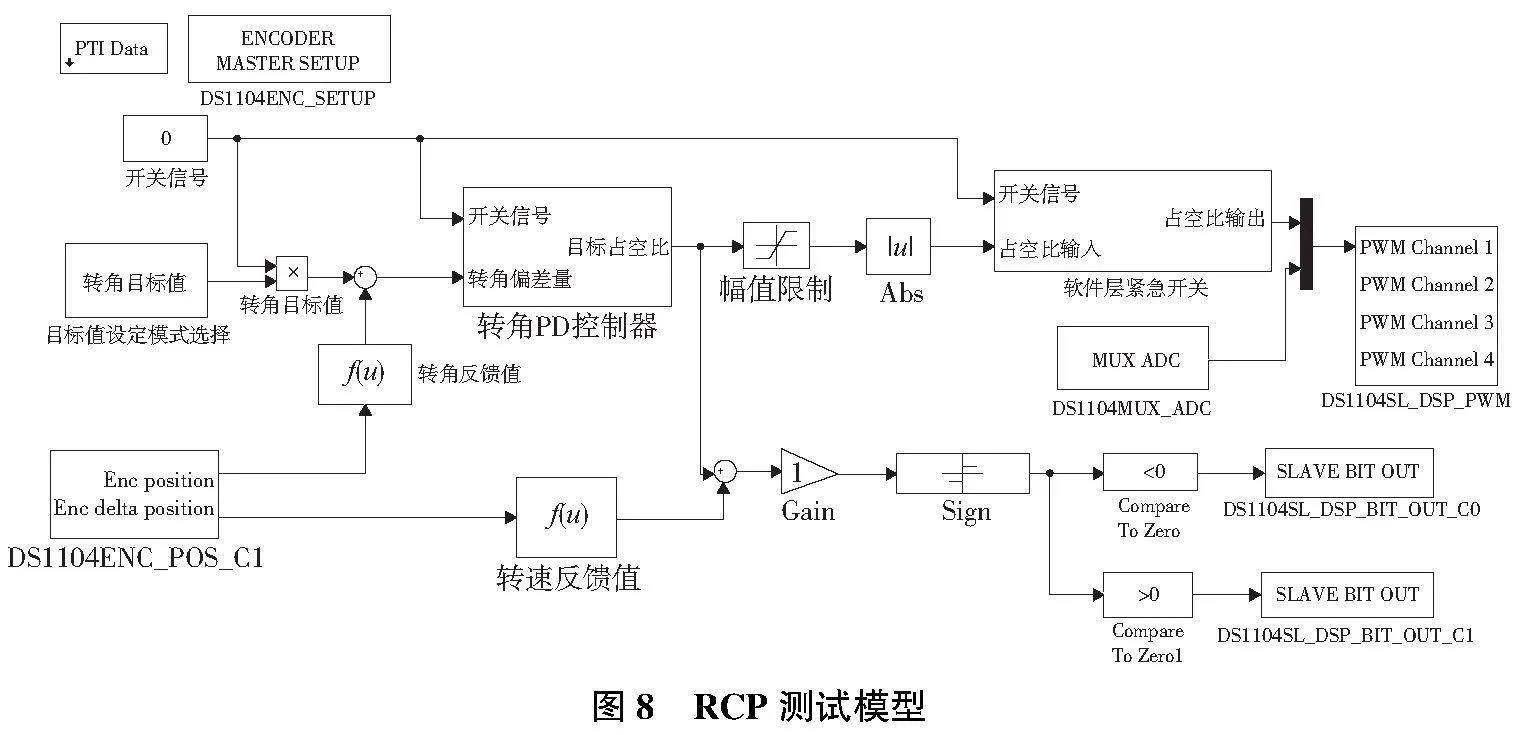
3.1 RCP测试模型搭建
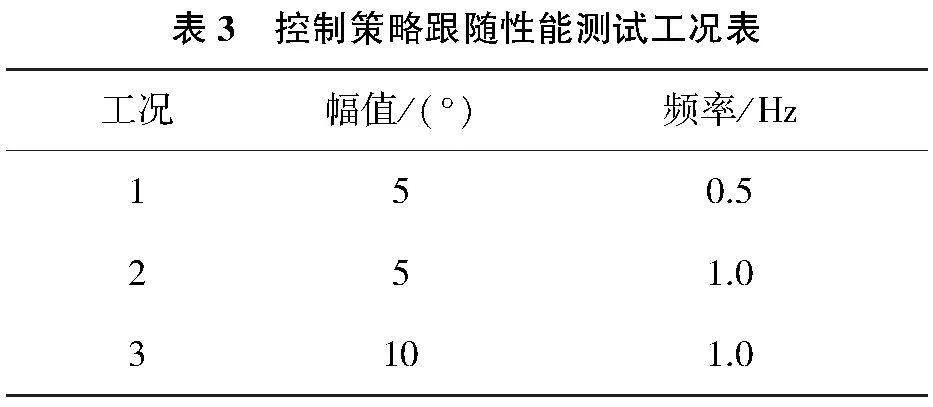
考虑到线控转向系统的实际用途,所以在半实物仿真试验阶段主要对3种控制器的跟随性能进行测试对比。因此设置3种不同幅值和频率的正弦波用以作为跟随性能测试的信号输入,3种信号如表3所示。
在Simulink中搭建控制逻辑图并编译,利用Controldesk软件可将编译的代码烧录到控制板之中。测试模型如图8所示。
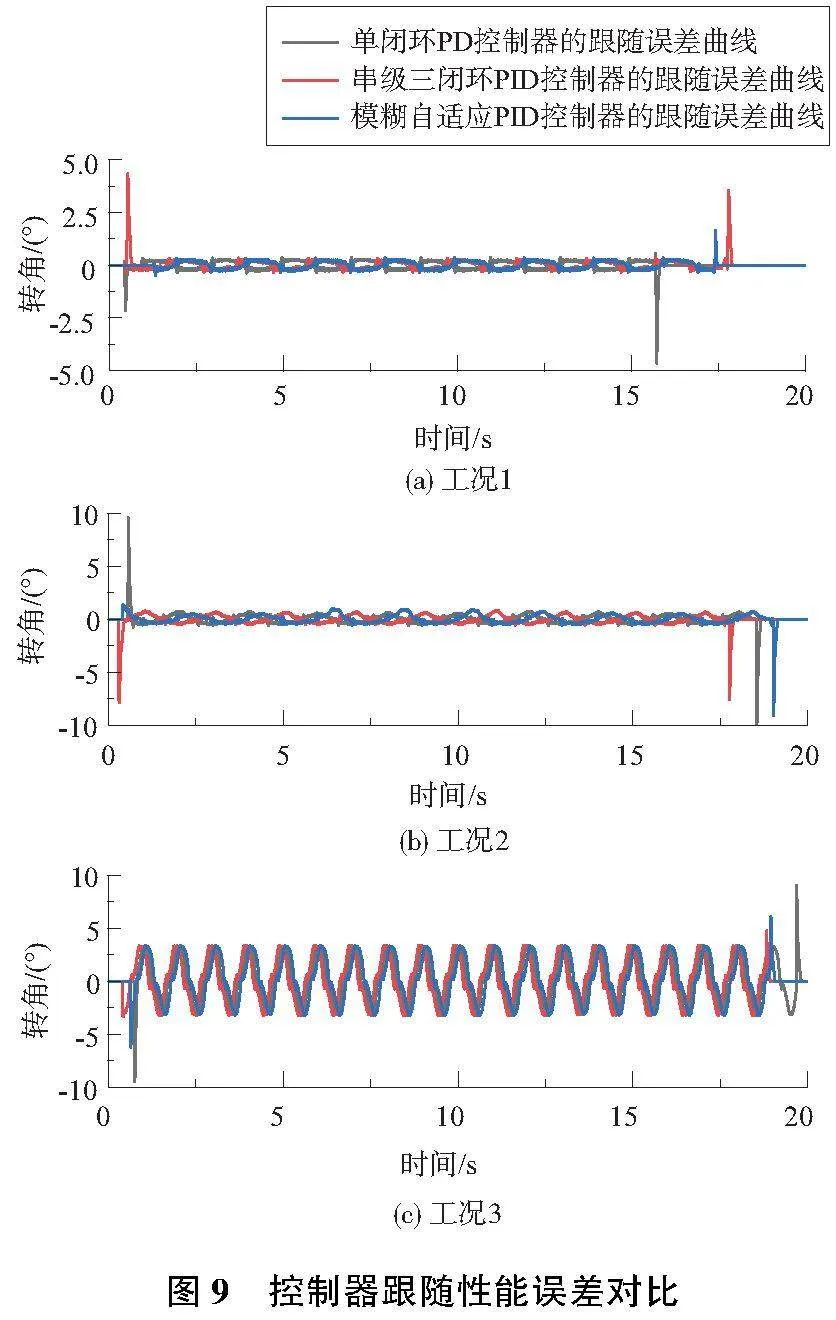
3.2 跟随性能误差对比
将3种控制器在不同工况下的跟随性能误差作为评判指标进行整理,得到跟随误差如图9所示(本刊为黑白印刷,如有疑问请咨询作者)。
从跟随性能误差曲线可以看出,在低频率低幅值的工况中,3种控制器误差都相对较小,但单闭环控制以及串级三闭环PID控制器在起始以及截止时刻都存在较大的跟随误差。在高频高幅值的工况下,3种控制器均存在较大的滞后与误差。
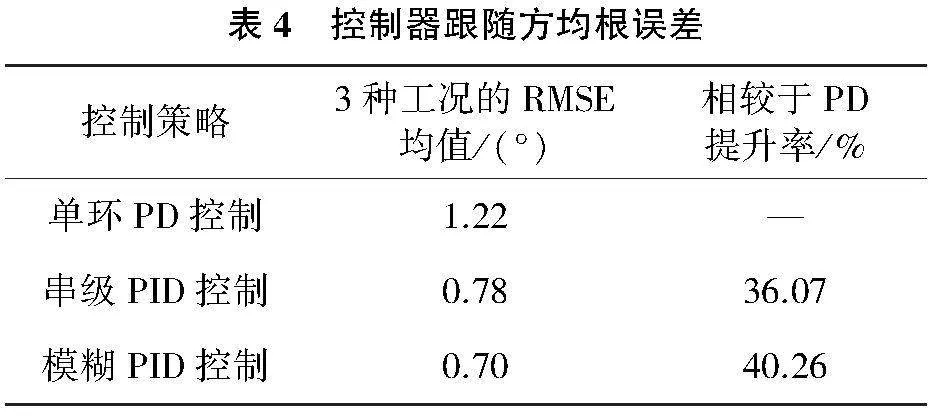
为进一步量化3种控制器跟随性能,对3种控制器在3种工况下的误差取散点的方均根,得到每种控制器在3个工况下的方均根误差均值如表4所示。对比表明,模糊PID控制器在跟随性能中是最优的。
4 结语
利用实验室已有的半实物仿真平台,对线控转向技术的控制策略做了逐步优化。利用临界比例度法对PID控制器参数进行整定,依次选用单闭环PD控制器、串级闭环控制器、模糊控制器对转角的阶跃响应性能进行了评判,利用dSPACE结合Simulink进行半实物仿真试验,对各种控制策略的跟随性能进行了进一步评判。仿真及试验结果证明,模糊控制器在线控转向技术中作为控制器最为优越。
参考文献:
[1] 宗长富,李刚,郑宏宇,等. 线控汽车底盘控制技术研究进展及展望[J]. 中国公路学报,2013,26(2):160-176.
[2]MORTAZAVIZADEH S A,GHADERI A,EBRAHIMI M,et al. Recent developments in the vehicle steer-by-wire system[J]. IEEE Transactions on Transportation Electrification,2020,6(3):1226-1235.
[3] 徐威,苏东海. 基于Linux的液压伺服系统半实物仿真方法研究[J]. 机械与电子,2022,40(8):3-7,13.
[4] PARK T J,OH S W,JANG J H,et al. The design of a controller for the steer-by-wire system using the hardware-In-the-loop-simulation system[C]//SAE Technical Paper Series. 400 Commonwealth Drive,Warrendale,PA,United States:SAE International,2002.
[5] 杨兴超,陈卓,冯谨涛. 基于V型开发模式光伏模拟器MPPT控制研究[J]. 电子元器件与信息技术,2020,4(1):138-140.
[6] 张鑫. 基于快速控制原型的汽车线控转向转角跟踪控制策略研究[D]. 成都:西南交通大学,2022.
[7] 张新丰,陈慧,孟宗良,等. 控制器V型开发模式实验教学探索[J]. 实验室研究与探索,2012,31(2):131-134.
[8] 刘冰琪,解初,刘鹏. PID控制器最优参数整定方法的研究[J]. 科技风,2022(19):1-3.
[9] 陈李成,谢振宇,郝建胜,等. 磁气组合轴承的模糊PID控制算法设计[J]. 机械制造与自动化,2021,50(2):143-147.
