基于无人机数据的精细化模型制作研究
2024-07-09徐梦洁郑朝峰季晓菲
徐梦洁 郑朝峰 季晓菲
关键词:无人机航摄;精细化模型;实景三维Mesh 模型;建筑物优化;悬浮物优化
0 引言
随着低空无人机摄影技术的迅速发展,倾斜相机组装技术日益完善,影像解算软件不断优化更新。基于倾斜摄影技术采集无人机影像,利用专业软件对采集的影像进行解算,结合高精度控制点成果,生产实景三维模型和各种测绘产品,已成为测绘产品主流的生产方式[1-3]。由于倾斜摄影一般具有多视角、高重叠度、高分辨率的特点,因此倾斜摄影解算精度更可靠,产品用途更加广泛[4-5]。然而,基于倾斜摄影方式采集的影像同时也存在航摄盲区、影像畸变大、冗余度高的特点,这为影像数据的解算和高质量模型的生产带来了影响[6-8]。为了提升实景三维模型成果的质量,笔者对倾斜摄影测量技术展开了深入研究,并对实景三维模型中影响模型质量的环节进行了分析。分析了模型质量不高的原因,并针对不同的原因,提出了相应的优化措施,从而提升模型的质量。为了验证本文提出方案的可行性,以某城市实景三维模型生产项目为研究对象,将本文的优化措施用于该项目中部分模型的优化,得到了高质量的实景三维模型成果。本文的研究对于精细化高质量模型的制作具有一定的借鉴意义。
1无人机倾斜摄影
1.1 无人机倾斜摄影原理
在无人机飞行平台上搭载1台或多台航摄仪,采用交叉五向飞行或航线飞行方式,获取目标物体顶部和侧面纹理影像数据。同时利用搭载的惯导设备,记录航摄仪曝光时的位置和姿态。采用专业的软件,结合位置和姿态数据,利用SIFT、ORB、SURF等匹配算法,对航摄影像进行同名点匹配,并基于匹配的同名点完成影像点云的密集匹配、不规则三角网的构建和优化、白模的制作和影像纹理优化映射,最终得到实景三维Mesh模型、数字真正射影像等成果。
1.2 无人机倾斜摄影系统组成
无人机倾斜摄影系统主要包括飞行平台、倾斜相机设备、数据处理软件和计算机设备。飞行平台需要能够满足低空飞行,飞控能够控制相机同时作业,获取厘米级分辨率的影像数据。目前飞行平台主要有无人机和有人机,无人机又分为多旋翼无人机和固定翼无人机。倾斜相机设备需要满足整体重量轻、单相机像素高、集成总相机像素高、相机镜头焦距固定等要求。目前倾斜相机主要有2个镜头、3个镜头和5个镜头等,倾斜相机焦距常见的为25mm、35mm、40mm 和50mm等。数据处理软件研发公司目前较多,国外的软件主要有美国本特利的Context Capture,瑞典的Pix4D Mapper,俄罗斯的Agisoft PhotoScan等;国内的软件主要有上海瞰景科技Smart3D,大疆的大疆智图,航天远景的Virtuoso3D等。不同软件之间由于算法存在差异性,因此解算得到的成果精度和解算效率也存在较大差异,而且倾斜影像存在畸变大、重叠度高、分辨率差异大等问题,导致部分软件解算得到的空三成果存在分层、弯曲等问题,无法直接使用。计算机设备主要考虑显卡、CPU、内存条大小和硬盘读写速度等因素,这些都直接影响模型的生产效率。
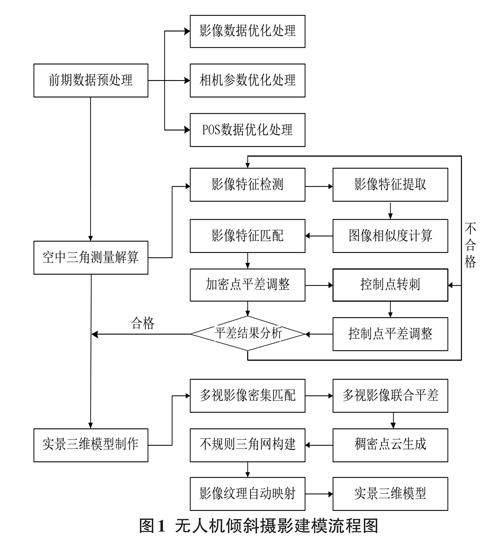
1.3 无人机倾斜摄影建模流程
基于倾斜影像数据生产实景三维模型的主要过程包括前期数据预处理、空中三角测量解算和实景三维模型制作等,具体的作业流程如图1所示。
2 精细化模型制作优化措施
对于模型成果质量的评价,除了对成果附件、坐标系统、绝对精度、相对精度等进行评价外,还包括对模型结构的完整性和纹理的正确性进行评价。本文主要从模型结构和纹理两方面展开研究,分析不同模型结构问题产生的原因,并给出对应的优化措施,然后对纹理进行编辑,以获得高质量的成果。模型结构问题常见的有路灯、树木悬浮物问题和建筑物结构扭曲变形问题。这两个问题影响了模型成果的视觉效果,因此需要对该类问题进行优化处理。
2.1 悬浮物问题产生原因及优化措施
实景三维模型其本质是“一张皮”模型,即属于表皮模型,组成该表皮模型的最小单元是三角网面片,而反映地形起伏变化、建筑物结构的也是该三角网面片。通过图2的实景三维模型制作流程可知,不规则三角网是基于稠密点云构建的,而稠密点云则是通过影像的密集匹配得到的。因此,对于悬浮物问题,其根本的产生原因是构建的三角网出现了不连续。树木、路灯这类地物,都具有中间部分较细小的特点,这种地物在进行多视影像密集匹配过程中,能够解算匹配得到的点较少,由于稠密点云数量少,按照不规则三角网构网原则,构建的三角网数量较少,出现了构网不连续现象,因此出现悬浮这一问题。
对于悬浮物的处理,可以从以下几个方面进行优化处理。1)获取更高分辨率的影像数据。在多视影像密集匹配与联合平差过程中,对于分辨率低的影像匹配得到的稠密点云,由于其精度低,因此在联合平差过程中,易被作为错误点进行删除。在同一软件中,影像分辨率越高,匹配得到的点云精度越高,且点云数量更多。因此,获取更高分辨率的影像数据有助于解决悬浮物这一问题。目前,获取高分辨率影像数据的常用方法包括仿地飞行、贴近摄影测量和地面补摄等。2)获取重叠度更高的影像数据。在影像解算过程中,密集点云的数量和影像的数量密切相关。当其他条件不变时,重叠度越高,获取的影像数量就越多,从而可以获取更稠密的点云数据,保证构建连续的三角网,解决悬浮物问题。3)获取更加密集的点云数据。因为点云数据是三角网构建的基础,因此获取更高分辨率的点云数据可以保证构建连续的三角网。对于点云的获取,除了基于影像匹配得到外,还可以直接采用三维激光扫描获取。由于航摄精度和扫描精度不一致,因此需要利用公共控制点对两套数据进行校正,在精度符合误差要求后,将扫描的点云数据导入到倾斜影像解算软件中,完成连续三角网的构建。4)利用模型库中的模型对悬浮物进行删除和替换。这是目前最常用的方式。对于实景三维模型,可以使用专业软件对实景三维模型进行编辑。编辑的本质是改变原有三角网的结构,重新进行三角网的构建。对于悬浮物的处理,一般是选中悬浮物,并直接删除,然后对高出地面部分的区域进行压平处理。压平处理后的模型一般会出现三角网叠加问题,在查看时会出现闪面问题,因此,对压平的区域进行删除,然后利用周边的三角网对删除后的孔洞进行内插,构建新的三角网,从而解决闪面问题。最后,结合空三加密成果,对编辑后的区域纹理进行修改,确保纹理过渡自然,与周边环境相适应。对于在第三方平台展示的模型,可以直接将模型库中的模型植入到平台中,然后对植入的模型尺寸进行修改,从而使模型更加真实,解决模型成果质量不佳的问题。
2.2 建筑物扭曲变形问题产生原因及优化措施
由于航空摄影是从空中对地面进行影像采集,因此对于密集建筑区域、道路两侧的临街商铺、屋檐、门廊等下面,是无法直接获取到影像数据的。在影像解算过程中,对于有影像的部分,可以准确解算得到密集点云;然而,对于航摄盲区,则无法准确解算得到点云。该部分点云稀少且精度差,导致在构建三角网时,由于点云数量少,无法准确构建三角网,因此出现了建筑物结构扭曲变形的问题。由于无可靠影像,在纹理映射过程中也会将错误的纹理映射到模型上,导致模型整体视觉效果差,质量低。
针对建筑物底部结构变形问题的处理,通常采用三维激光扫描方式和单体化方式进行优化处理。三维激光扫描方式即采用静态或动态方式获取建筑物底部的点云数据和影像数据,然后利用控制点对点云数据进行纠正,将影像纹理映射到点云上,得到彩色点云成果。通过公共控制点对倾斜空三成果进行平差纠正,在确保扫描的点云成果和影像成果精度在误差允许范围内的情况下,将点云成果导入建模软件中,通过两套点云的融合进行三角网的构建,从而得到高质量建筑物模型。单体化方式即以倾斜空三加密成果为基础,将该成果数据恢复到单体化软件中,利用恢复的立体像对模型,对建筑物的结构轮廓进行采集,然后得到建筑物白模,利用空三成果,将影像的纹理映射到白模上,然后编辑修改映射的纹理,直到纹理与实际情况相符,从而得到高质量的模型成果,解决建筑物扭曲变形的问题。
3 项目应用
某城市开展实景三维模型生产,利用专业的倾斜摄影建模软件生产的模型成果存在树木悬浮物、建筑扭曲变形的问题,影响模型成果的整体质量。基于本文提出的模型优化措施,对实际生产的模型进行了优化处理,得到了质量较高的模型成果。部分模型优化前后的效果对比图如图2和图3所示。
4 结束语
本文首先探讨了无人机倾斜摄影技术,其次深入分析了模型悬浮物、建筑物扭曲变形问题产生的原因,并给出相应的模型优化措施。最后以实际项目为例,对本文提出的措施的可行性和优化效果进行了验证。通过优化前后的模型对比可知,采用本文提出的措施可以得到精细化模型。本文的研究对于无人机数据精细化模型的制作具有一定的借鉴意义。
