计及质心侧偏角动态自适应的无人驾驶汽车横坡弯道跟踪控制
2024-07-03张玮高爱云付主木赵恩会陈芊安
张玮 高爱云 付主木 赵恩会 陈芊安


摘要:
针对无人驾驶汽车在横坡弯道处因发生偏离期望轨迹甚至严重侧滑而失去稳定性的问题,提出质心侧偏角动态自适应控制策略。为应对汽车垂直载荷发生变化而导致轮胎侧偏刚度改变的情况,通过多组数据拟合得到载荷匹配图,进而设计基于模型预测算法的横向轨迹跟踪控制器,根据汽车入弯速度选择预测时域并结合道路弯度选择瞬态、稳态质心侧偏角,通过在线优化生成最佳前轮转角。最后搭建CarSim/Simulink联合在线仿真系统和实车系统进行验证,结果表明:所提控制策略能够保证汽车在横坡倾角为7%左右及弯道路面下不会出现严重的侧滑,从而提高了无人驾驶汽车在横坡弯道跟踪任务中的跟踪精度,使汽车具有良好的横向稳定性。
关键词:无人驾驶汽车;模型预测控制;质心侧偏角;横坡弯道
中图分类号:U461
DOI:10.3969/j.issn.1004132X.2024.06.002
开放科学(资源服务)标识码(OSID):
A Lateral Slope Curve Tracking Control for Autonomous Vehicles
Considering Dynamic Adaptive Sideslip Angles
ZHANG Wei1 GAO Aiyun1 FU Zhumu2 ZHAO Enhui1 CHEN Qianan1
1.School of Vehicle and Traffic Engineering,Henan University of Science and Technology,Luoyang,
Henan,471003
2.College of Electronic Information Engineering,Henan University of Science and Technology,
Luoyang,Henan,471023
Abstract: To address the problems that the autonomous vehicle deviated from the expected trajectory at the lateral slope curve, and even losed stability owing to severe sideslipping, a dynamic adaptive control strategy for sideslip angle was proposed. To overcome the change of tire cornering stiffness caused by the changes of vertical loads of the vehicles, the load matching diagram was obtained by fitting multiple sets of data. Then, a lateral trajectory tracking controller was designed based on the model prediction control algorithm. In line with the entry speed of the vehicles into the turn, the prediction horizon was selected. Meanwhile, the transient-state and steady-state sideslip angle were selected in line with the road curve. Through online optimization, the optimal front wheel steering angle was generated. Finally, the CarSim/Simulink joint online simulation system and the real vehicles system were established for verification. The results demonstrate that the proposed control strategy may ensure that the vehicles will not have serious sideslip under the lateral slope inclination angle of around 7% and the curved road. In addition, the proposed control strategy improves the tracking accuracy of the autonomous vehicles in the lateral slope curve tracking task and makes the vehicles have good lateral stability.
Key words: autonomous vehicle; model prediction control; sideslip angle; lateral slope curve
收稿日期:20231118
基金项目:国家自然科学基金(62371182)
0 引言
近年来,自动驾驶汽车的出现为交通安全、交通拥堵和汽车出行提供了全新的解决方案,引发了广泛的社会和工业关注。无人驾驶汽车控制技术取得了令人瞩目的进展,已经成为自动驾驶领域的研究热点和发展领域[1]。现有控制算法中,模型预测控制(model predictive control,MPC)因具有适应性强、多约束处理方便等优势,并可提供高效、安全的解决方案而得到广泛的应用[2]。许多学者提出了基于自适应MPC的轨迹跟踪控制方法。梁忠超等[3]考虑汽车时变状态量偏差带来的影响,设计了一种动态卡尔曼滤波器,该滤波器增益矩阵在每一个采样时刻能自动更新,以适应无人驾驶车辆当前的工作环境,从而补偿车辆的非线性以及状态测量噪声带来的影响。王银等[4]提出一种根据车速变化而实时产生预测时域的自适应控制器,并添加了侧偏角约束,使汽车能够在低附着路面下具有良好的跟踪精度和稳定性。ZHANG等[5]利用平方根容积卡尔曼滤波器(square root cubature Kalman filter,SCKF)实时估计侧偏力,以此来修正轮胎转弯时的侧偏刚度。这些方法虽然都能够使汽车在极端变化条件下具有较高的适应性,但却忽略了轮胎垂直载荷的变化,对横坡弯道适应性差。为获取更准确的弯道路段曲率和质心侧偏角,刘平等[6]采用三次贝塞尔曲线法对道路数据进行拟合获取道路曲率,设计了考虑道路曲率的控制器,在不同曲率道路行驶时具有较小的横向跟踪误差;GUO等[7]利用全球卫星定位系统(global positioning system, GPS)和惯性导航系统(inertial navigation system, INS)的数据融合方式估计汽车质心侧偏角,提高了估计精度。但两者在控制器中均采用定值预测时域,求解时间长,实时性差。YANG等[8]使用侧向垂直载荷比(predicted lateral load transfer ratio, PLTR)作为稳定性阈值以避免汽车在弯道上发生侧翻、滑移等现象;付林凯等[9]利用多种群遗传算法优化线性二次型调节器(linear quadratic regulator, LQR)参数,有效防止汽车发生侧翻;JIA等[10]建立了基于后轮侧偏角的稳定平衡点条件,设计了非线性动态系统的稳定性控制器以防止汽车出现较大的侧偏角和后轴侧滑,但载荷比无法反映地形的影响,限制了它在横坡弯道的应用。为解决汽车在极限工况下的速度匹配问题,蔡英凤等[11]采用PID控制和MPC控制混合策略实现了不同车速下的跟踪,保证了跟踪精度和稳定性,但没有对纵向速度进行控制,不能精准计算汽车入弯速度,使其在弯道上的跟踪能力下降。
计及质心侧偏角动态自适应的无人驾驶汽车横坡弯道跟踪控制——张 玮 高爱云 付主木等
中国机械工程 第35卷 第6期 2024年6月
上述方法大都应用在地形简单的结构化道路上,无人驾驶汽车在横坡弯道上实现安全而高效的行驶仍然面临跟踪精度低和横向稳定性差的问题,因此本文提出一个可以解决汽车在横坡弯道上行驶时轮胎侧偏刚度不准确的方法,进而提高轨迹跟踪精度。在保证轨迹跟踪精度的同时,使提出的瞬态、稳态质心侧偏角动态自适应方法能够应用到MPC算法中,增加汽车的横向稳定性。最后通过仿真实验和实车实验验证了本文方法的可靠性。
1 考虑道路侧倾角和曲率的汽车动力学模型
道路曲率和横坡地形对汽车轨迹跟踪精度和横向稳定性具有重大的影响,汽车在横坡弯道行驶时,容易发生侧滑甚至侧翻,因此需要准确地建立汽车侧倾动力学模型,忽略汽车在转向时由弹性元器件侧倾导致的质心偏移、空气动力学的影响以及转向系统的影响。以前轮转角作为输入,综合考虑横摆、侧滑和侧倾约束,建立考虑道路倾角及曲率的汽车动力学模型如图1所示。
图1中,X、Y分别为大地坐标系下的纵向位置和横向位置;ed为质心与其在道路中心线上的投影点之间的距离偏差,定义汽车在道路左侧时距离偏差为正;αf、αr分别为前后轮侧偏角;Lf、Lr分别为质心到前后轴的距离;Fy为整车轮胎侧偏力,Fy=Fyfcos δf+Fyr;Fyf、Fyr分别为前后轮胎侧偏力;δf为前轮转角,将其作小角度假设;φ为横摆角;β为质心侧偏角;θ为汽车航向角,θ=β+φ。在自然坐标系中[12],可得到
eφ=φ-θr
e·φ=φ·-θ·r(1)
式中,eφ为航向角偏差[13];θr为当前质心投影点处的道路参考航向角。
P点(道路参考点)沿道路中心线的移动速度s·可以表示为
s·=11-krefed(vxcos eφ-vysin eφ)(2)
式中,vx、vy分别为汽车质心在汽车坐标系下的纵向速度和横向速度;kref为道路参考曲率。
则汽车跟踪误差方程可以表示为
e·φ=φ·-krefs·
e·d=vxsin eφ+vycos eφ(3)
对航向角偏差eφ作小角度假设,令1-krefed≈0,则式(3)可以简化为
e·φ=φ·-krefvx
e·d=vxeφ+vy(4)
汽车的侧倾主要是由汽车悬架系统变形所产生的,将汽车的悬架系统简化为一个弹簧阻尼模型,则汽车侧倾受力示意图见图2。
图2中,g为重力加速度,Dt为轮距,为汽车侧倾角且作小角度假设,t为道路侧倾角。悬架系统所产生侧倾力矩为
Mx=K+D·(5)
式中,K、D分别为汽车的侧倾刚度系数和侧倾阻尼系数。
将式(4)、式(5)引入动力学方程可得
v·y=-ψvx+h¨+1mFy-g
ψ·=1Iz(LfFyf-LrFyr)
¨=1Ix[mh(v·y+ωr-h¨)+mgh-Mx]e·φ=φ·-krefvxe·d=vxeφ+vy(6)
式中,m为汽车质量;Iz、Ix分别为汽车绕z轴和x轴的转动惯量;h为汽车质心到地面的距离;定义ψ=θ·为航向角速度;ωr为横摆角速度。
2 MPC控制器设计
2.1 横向预测模型
选取ζ=(vy,ψ,·,,ed,eφ)Τ为状态变量,u1=δf为控制输入量,u2=(t,kref)Τ为控制附加输入量,根据式(1)~式(6),转换为连续状态空间方程的表达形式为
ζ·=Aζ+B1u1+B2u2
η=Cζ(7)
A=σ1σ4vxσ2σ4vx-vx-hDIxσ500σ2Izvxσ3Izvx0000hσ1Ixvxhσ2Ixvx-DIx-KIx0000100010000vx010000
B1=[-Cfσ4-LfCf/Iz-hCf/Ix000]Τ
B2=hK/Ix0K/Iz00000000-vxΤ
σ1=Cf+Cr σ2=LfCf-LrCr
σ3=L2fCf-L2rCr σ4=(1/m+h2/Ix)
σ5=-Kh/Ix-g
式中,A为n×n的状态矩阵,表示系统状态量之间的关系;B1、B2为n×p的输入矩阵,表示输入对状态变量的影响;C为m×n的输出矩阵,表示系统的输出与状态变量之间的关系;n为系统状态变量个数;m、p分别为输出个数和输入个数;η为系统的输出变量;Cf、Cr分别为汽车前后轴一侧轮胎的侧偏刚度。
使用向前欧拉法将系统作离散化处理,式(7)可改写为
ζ(k+1)=Atsζ+Bts1u1(k)+Bts2u2(k)
η(k)=Ctsζ(k)(8)
Ats=In+Ats Bts1=B1ts Bts2=B2ts
Cts=100000000001
式中,ts为离散化步长;In为单位矩阵,n=6。
2.2 汽车弯道安全行驶约束
2.2.1 汽车侧倾约束
当汽车在横向坡道上行驶时,一旦汽车的横向加速度超过一定值,就会使汽车一侧车轮的垂直载荷减小。随着车身质心高度的增加,汽车发生侧倾的概率也会随之增大。无人驾驶汽车侧倾稳定性控制主要是存在时变道路曲率和横向坡度角时的汽车侧倾趋势预测。本文选用零力矩点(zero moment point, ZMP)理论[14]作为侧倾稳定性判断的判据。
零力矩点是指在地面上的一个特定点,它的存在使得重力、惯性力以及地面对汽车的作用力FN的总和产生的侧倾力矩等于零。在平路或者有一定倾斜角度的路面上行驶且没有横向加速度时,ZMP与重力作用线重合,但当汽车有横向加速度ay或者道路有一定的横向坡度时,ZMP会发生横向偏移,如果横向倾角过大或者横向加速度过大,ZMP可能会偏离轮距范围,导致汽车失去平衡。汽车侧倾受力图见图3。
汽车的侧倾稳定性分析主要关注零力矩点的横向偏移yZMP。由相对于零力矩点的侧倾力矩平衡可以得到
mgcos yZMP=(may+mgsin )h-Ix¨(9)
ay=v·y+ψvx
通过对作小角度假设,由式(9)可以得到零力矩点的横向偏移
yZMP=h+hg(v·y+ψvx)-Ixmg¨(10)
将零力矩点的横向偏移yZMP相对于汽车轮距一半(Dt/2)进行归一化处理,得到
y-ZMP=2Dt[h+hg(v·y+ψvx)-Ixmg¨](11)
将式(11)和式(8)结合,可以得到
y-ZMP=M1ζ·(k)+M2ζ(k)(12)
M1=[2hgDt0-2IxmgDt000]
M2=[02hvxgDt02hDt00]
对归一化的侧倾零力矩点进行约束:
-y-ZMP.max≤y-ZMP≤y-ZMP.max(13)
2.2.2 汽车滑移稳定性约束
滑移稳定性约束与横向稳定性判据相关,目前针对无人驾驶汽车的横向稳定性评价分析最常用的是相平面分析法。这是一种针对一阶、二阶线性或非线性系统运动轨迹的图形解法,能够通过研究相轨迹来分析系统的稳定性、平衡位置、稳态精度以及条件参数对系统的影响。相平面分析法在汽车动力学模型的基础上,以汽车状态参数为坐标构建相平面。由于汽车在横坡弯道上行驶时,转弯前和转弯后的车速通过纵向控制器控制,速度变化范围大,因此本文选择航向角速度横向速度相平面,如图4所示。根据文献[15]选择滑移约束相平面中的航向角速度范围为±10°/s,横向速度范围为±0.8 m/s,即可保证汽车横向稳定性。
当侧偏角较大时,汽车在横坡上会发生滑移和失稳,而后轮滑移会导致汽车在道路上发生侧滑,危险性大,因此在保证轮胎处于线性区域的同时,对侧偏角进行范围限制:
-αt≤vy-Lrψvx≤αt(14)
其中,αt为轮胎侧偏角的限值;ψ的限制范围可由后轮的最大侧偏力和式(6)联立得到,即
|ψ+gvx|≤Crαt(1+LrLf)/(mvx)(15)
当轮胎短暂处于非线性区域时,为了保证汽车横向稳定性和控制器有解,引入松弛因子λst(k),则式(14)和式(15)的状态空间表达形式为
|Gst(k)ζ(k)|≤|Rst(k)+λst(k)|(16)
Gst(k)=1vx-Lrvx000001gvx000
Rst(k)=[αtCrαt(1+Lr/Lf)mvx]Τ
2.3 目标函数设计
将2.2节中含有侧倾、滑移约束的无人驾驶汽车跟踪问题转化为二次型最优控制目标问题,可表示为
min J=∑Npk=1(Reφ(eφ(k))2+Red(ed(k))2)+
∑Npk=1(Rδf(δf(k)-δf(k-1))2)(17)
ζ(k+1)=Atsζ+Bts1u1(k)+Bts2u2(k)
-y-ZMP.max≤y-ZMP≤y-ZMP.max
|Gst(k)ζ(k)|≤|Rst(k)+λst(k)|(18)
式(17)中,Reφ、Red、Rδf分别为航向角误差权重、横向位置误差权重、前轮转角增量权重;式(18)中,第1式为离散化的汽车动力学模型,第2式和第3式分别为汽车跟踪过程中的侧倾和滑移稳定性约束。
将式(17)和式(18)使用二次规划求解器转化为标准二次型,并结合所考虑的约束来求解在控制周期内的目标函数,控制器会产生一系列最优δf的控制序列:
ΔU(k)=(Δu(k),Δu(k+1),Δu(k+Nc-1))Τ(19)
其中,Nc为控制时域。将ΔU(k)的第一项作为系统的实际控制输入,即
u(k)=u(k-1)+Δu(k)(20)
式中,u(k)为k时刻的控制量。
2.4 轮胎侧偏刚度修正
当汽车侧偏角比较小时,轮胎侧偏角和轮胎所受横向力成线性关系,表示为
Fyf=Cfαf
Fyr=Crαr(21)
αf=-(δf-β-Lfψvx)αr=β-Lrψvx(22)
当轮胎处于线性区域时,轮胎侧偏力与侧偏角才成线性关系。当汽车在高速转弯时,汽车前后轴的垂直载荷和左右侧车轮的垂直载荷不再是常数,各车轮垂直载荷分别为
Fzf,l=m2(Lr+Lf)(Lrg-hax)-m(Lrhay)Dt(Lr+Lf)
Fzf,r=m2(Lr+Lf)(Lrg-hax)+m(Lrhay)Dt(Lr+Lf)
Fzr,l=m2(Lr+Lf)(Lfg+hax)-m(Lfhay)Dt(Lr+Lf)
Fzr,r=m2(Lr+Lf)(Lfg+hax)+m(Lfhay)Dt(Lr+Lf)(23)
式中,Fzf、Fzr分别为前轮和后轮垂直载荷;F的下标l、r分别表示左右车轮;ax为汽车纵向加速度。
当汽车在横坡行驶时,如果坡度过大,轮胎的垂直载荷会发生变化,而控制器认为垂直载荷一直为定值,由此,势必会造成计算偏差,因此本文采用递推最小二乘法(recursive least square, RLS)和数据拟合的方法来修正轮胎的侧偏刚度。RLS通过研究历史数据窗口从而使得实际值与RLS估计值最小,其代价函数表示为
J=∑Hi=1λ(H-1)m(Ym(i)-αΤ(i)α^(i))2(24)
式中,α(i)为侧偏角;Ym为估计的侧偏力;λm为遗忘因子;H为窗口长度。
首先采用RLS法来对轮胎的侧偏刚度进行估计:
Ym(k)=C^RLS,j(k)αΤj(k)
C^RLS,j(k)=C^RLS,j(k-1)+K(k)(Ym(k)-
αΤj(k)C^RLS,j(k-1))
K(k)=P(k-1)αj(k)(λm+αΤj(k)P(k-1)αj(k))-1
P(k)=λ-1m(P(k-1)-K(k)αΤj(k)P(k-1))(25)
式中,j=f,r;C^RLS,j为估计的侧偏刚度;K(k)为递推增益。
为了修正由于垂直载荷发生变化而带来的误差,利用多组数据拟合的方式对轮胎侧偏刚度进行修正,垂直载荷Fz从1961 N增大到15 690 N,忽略轮胎外倾,在仿真平台上分别拟合8组车轮侧偏角、侧偏力和侧偏刚度的数据,如图5所示。
轮胎侧偏力和侧偏角可由仿真环境的传感器测量获得,之后用Fiala魔术轮胎公式进行拟合:
Fy=Dsin{Carctan[Bα-E(Bα-arctan(Bα))]}(26)
式中,B、C、D、E为与垂直载荷相关的轮胎模型参数。
修正后的轮胎侧偏特性表达式为
Fyf=C-fαfFyr=C-rαr(27)
C-f=Ctire,f+C^RLS,f2
C-r=Ctire,r+C^RLS,r2
式中,C-f、C-r分别为修正后的前后轮侧偏刚度;Ctire为多组拟合出的轮胎侧偏刚度,其值通过求取对应曲线的斜率获得。
为验证修正后的轮胎侧偏刚度在轨迹跟踪中的效果,在Simulink与CarSim联合仿真平台上搭建控制系统进行仿真。由于五次多项式自带车况和道路信息[16],能提供所需要的参考速度、参考加速度和参考道路曲率,故选择该轨迹进行验证,设置期望轨迹的横向位置为10 m。
图6为侧偏刚度修正前后跟踪五次多项式换道曲线,图7为相对应的横向误差曲线,从换道开始到换道结束,采用未修正的控制器横向误差变化程度大。利用平均绝对百分比误差(mean absolute percentage error, MAPE)作为评价指标,侧偏刚度修正前的MAPE为11.86%,侧偏刚度修正后的MAPE为4.63%,MAPE下降了7.23%,轨迹跟踪精度提高了61%。
3 质心侧偏角动态自适应控制策略
汽车在横坡弯道行驶时,质心侧偏角会影响汽车跟踪精度和横向稳定性。由于质心侧偏角会受到汽车进入弯道速度的影响,故自适应控制策略包括入弯速度确定,道路弯度确定和瞬态、稳态质心侧偏角动态自适应三部分。
3.1 入弯速度确定
汽车通过驱动系统和制动系统来控制汽车的入弯速度。为了不让汽车加减速时超过最大的附着力和制动力,将汽车简化为点质模型,通过轮胎摩擦圆法求解极限加速度,可以表示为
a2x+a2y=(μg)2(28)
式中,μ为摩擦因数。
汽车在稳态转弯时,横向加速度可表示为
ay≈v2xkref=2v2xi2q(29)
式中,q为弯道圆弧的测量距离;i为曲率的斜率系数。
结合式(28)和式(29)得
ax=(μg)2-(2v2xi2q)2(30)
根据文献[17]确定入弯速度,将式(30)化简并从弯道的起点到末端进行积分,得到
vx(q~N+1)≈vx(q~N)+
(Δq~N(μg)2-(2(vx(q~N))2i2q~N)2)/vx(q~N)(31)
N=0,1,…,L/Δq~N
L=q~(kref=0) Δq~N=q~N+1-q~N
式中,q~为弯道末端的弧长;q~N为第N段弯道的弧长。
得到vx后通过式(30)得到汽车沿弯道路径的期望纵向加速度,再通过式(31)得到汽车进入弯道的期望速度。
由于进入弯道前后的速度不同,因此在控制器中应使用不同的预测时域,当车速较低时,采用小的预测时域,跟踪效果好,车速较高时,选择大的预测时域,以使汽车能够预测远距离情况,增加汽车行驶的横向稳定性[18]。为了能够适应车速变化带来不同的预测时域,本文的预测时域Np采用文献[4]提出的控制律进行选择:
Np=
8 vx<36 km/h
int(-0.000 042 866v3x+0.011 6v2x-
0.6944vx+20)36 km/h≤vx≤120 km/h
20vx>120 km/h(32)
3.2 道路弯度确定
根据期望路径的信息,在道路上每间隔Δ取一个采样点,并在连续3个点之间进行道路弯度的计算。如图8所示,图中起始点从O1点开始到O5点结束。先以O1为基点,计算O2与O3点之间的弯度Θ1,然后再以O2为基点计算O3和O4之间的弯度Θ2,以此循环,最后计算Θ3。弯度公式表示为[19]
Θi=|arctan(|Yi-Yi+1Xi-Xi+1|)-arctan(|Yi+1-Yi+2Xi+1-Xi+2|)|(33)
式中,Θi为第i段线到i+1段线的道路弯度;Xi、Yi分别为道路的纵向距离和横向距离。
道路弯度曲线如图9所示。
3.3 瞬态、稳态质心侧偏角动态自适应控制
考虑到汽车的横向稳定性,汽车在直线行驶时,需要以较高的车速快速通过,允许一定范围内的振荡;在弯道下,需要平缓地驶过,使汽车不发生较大的振荡以提高乘坐舒适性。瞬态质心侧偏角在瞬态时的振荡大,而在稳态时的跟踪误差小;相反稳态质心侧偏角在瞬态时的振荡小,而在稳态时跟踪误差大[20]。
瞬态质心侧偏角表示为
β=vyvx(34)
稳态质心侧偏角表示为
βss=αr,sat+Lrψvx(35)
αr,sat=arctan(3mgμC-rLfLf+Lr)
式中,βss为稳态质心侧偏角的最大值;αr,sat为轮胎线性临界区处的后轮侧偏角。
根据汽车行驶道路的情况,质心侧偏角的选择如图10所示。汽车行驶在直线道路时控制器使用瞬态质心侧偏角,反之汽车行驶在弯道道路时控制器使用稳态质心侧偏角。
质心侧偏角动态自适应控制策略如图11所示,图中,Θref为参考道路弯曲度;Xr、Yr分别为参考道路的纵向位置和横向位置。根据道路提供的信息,先确定入弯速度得到最佳的预测时域,再根据图9的道路弯度值,如果Θref=0,则选择用β的控制器,如果Θref≠0,则选用βss的控制器。预测时域和质心侧偏角确定后输入到横向控制器中,控制器使用的是由RLS和垂直载荷图修正后的侧偏刚度并实时更新,目标函数和约束将转化为标准二次规划求解问题,最后将求解出的最优控制量δf作用于汽车系统完成实时控制。
4 在线仿真与实车验证分析
4.1 在线仿真验证分析
在CarSim/Simulink中搭建联合仿真平台,实验使用的是前驱E类汽车,汽车参数如表1所示。
仿真工况采用高速高附着长工况和低速低附着短工况进行实验。出于安全考虑,高速采用软件仿真,低速采用实车验证。高速路况部分,采用存在道路弯度和横坡倾角的无障碍物路面进行实验,如图12所示。在道路三处弯道处,横坡倾角在7%左右,分别为7.6%、7.8%、8%。在CarSim中设置起始车速为15 m/s,45 m/s为最高限制车速。分别采用不考虑质心侧偏角动态自适应的普通MPC控制策略1和考虑质心侧偏角动态自适应的MPC控制策略2进行轨迹跟踪,采用横向误差、质心侧偏角、航向角、前轮转角作为轨迹跟踪精度的指标,使用航向角速度和横向速度组成约束范围,作为汽车轨迹跟踪横向稳定性的指标,仿真结果如图13和图14所示。
图13a表明:控制策略1下,横向跟踪误差较大,误差最大为0.6 m;而控制策略2的跟踪误差较小,误差在0.5 m以内。图13b表明:控制策略
2能够使汽车在转弯时质心侧偏角控制在±1°以内,控制策略1尽管在水平直线道路上表现良好,但是在弯道处质心侧偏角急剧变化并且伴随着抖动,甚至使得质心侧偏角达到将近±4°,使汽车在转弯时发生失稳。图13c~图13d表明:控制策略2使汽车在跟踪轨迹时,航向角和前轮转角分别控制在±8°和±40°范围内,而控制策略1由于没有考虑动态自适应的质心侧偏角,在弯道处均超过±8°和±40°,在仿真画面中显示汽车已经偏离车道中心线,汽车发生侧滑。
图14表明,在三种高速段内,随着车速的增大,横向速度减小,航向角速度增大,但航向角速度和横向速度均在滑移稳定性约束内(横向速度在±0.8 m/s,航向角速度在±10°/s内),证明控制策略2能够使得汽车在高速环境下转弯时具有良好的横向稳定性,且滑移稳定性约束随着车速的增大而增强,符合现实情况。
4.2 实车验证分析
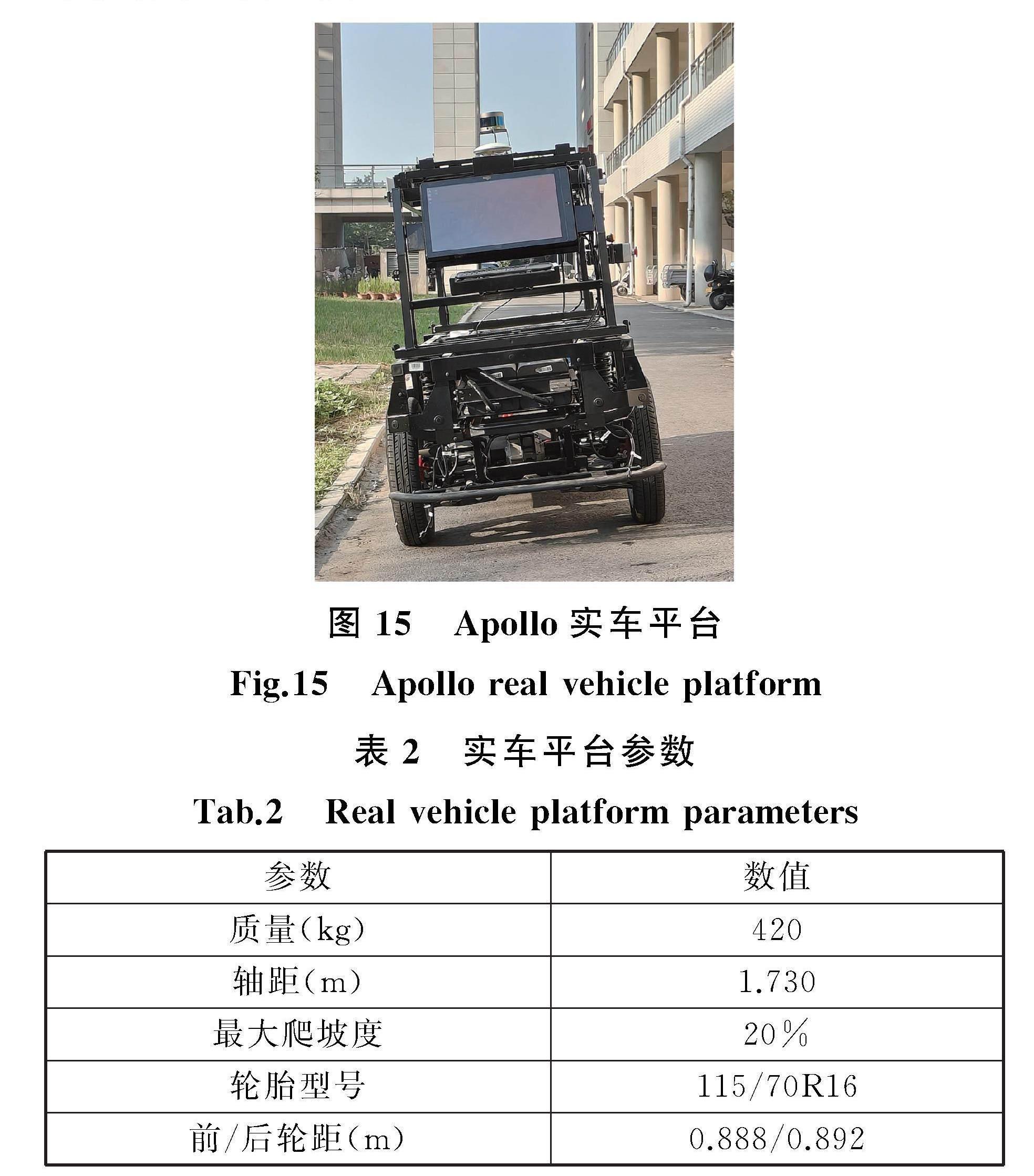
实车平台采用的是基于Apollo平台的开发套件,汽车型号为Apollo D-KIT Advanced Ne-s,该车搭载有16线束的激光雷达1台、双目前后摄像头两台以及装有GPS+IMU的惯性导航系统,该车通过搭载在Ubantu系统上的Apollo控制系统对汽车进行控制。实车平台如图15所示,汽车参数如表2所示。
为验证所提策略在横坡弯道环境下轨迹跟踪精度和横向稳定性,考虑到该车轴距小,最高车速低,在汽车轨迹跟踪测试中,双移线使用频率高,为此选择低速低附着系数的双移线工况进行验证,如图16所示。
汽车车速v设定为0 ~30 km/h,路面附着系数为0.5。评价指标和仿真实验评价指标一致,实验结果如图17和图18所示。
图17表明,在三种低速段内,航向角速度和横向速度均在滑移稳定性约束内(横向速度在0.5 m/s内,航向角速度在6°/s内),减少了汽车在弯道上的滑移,保证了汽车的横向稳定性。
图18表明,汽车行驶到三个弯道处时,控制策略2使得横向误差控制±0.3 m以内,质心侧偏角控制在±2°以内,横摆角和前轮转角分别控制在±8°和±60°以内,4个指标均小于控制策略1,说明:考虑质心侧偏角的动态变化能够保证汽车更精确、更稳定地跟踪目标轨迹。
5 结论
本文针对汽车在横坡弯道行驶工况下容易偏离期望轨迹及横向稳定性差的问题,建立了考虑质心侧偏角动态自适应的模型预测控制算法。在横向控制的基础上,通过对驱动、制动系统控制,根据入弯速度来匹配最优的预测时域,同时考虑了汽车的横向稳定性和侧倾稳定性,解决了传统研究只考虑横向控制而导致汽车在弯道处偏移跟踪轨迹的问题。同时为了弥补由于定值的垂直载荷和传统RLS估计造成的误差,利用多组垂直载荷数据制定载荷匹配图,利用平均绝对百分比误差(MAPE)指标来修正轮胎的侧偏刚度。得出的结论如下:
(1)提出的轮胎侧偏刚度修正方法将汽车在弯道处的横向误差控制在±0.1 m以内,与未修正时的效果相比,修正后的轨迹跟踪精度提高了61%。
(2)在联合仿真和实车平台上分别验证高速和低速工况,实验结果证明:本文设计的考虑质心侧偏角动态自适应的模型预测控制策略能够降低汽车在弯道处的误差,且滑移约束控制在约束范围内,汽车没有在弯道处发生严重侧滑,保证了汽车具有良好的横向稳定性。
下一步的研究可以在本文的基础上优化计算时间,提高效率;在实验设计和仿真时,只考虑了道路曲率和汽车侧倾带来的横向误差,但在实际中,无人驾驶的感知和定位也会带来误差,下一步的研究可以考虑它对轨迹跟踪精度和横向稳定性的影响。本文没有研究车速、道路弯度和预测时域的具体关系,下一步拟通过研究速度规划解决。
参考文献:
[1] YAO Qiangqiang, TIAN Ying, WANG Qun, et al. Control Strategies on Path Tracking for Autonomous Vehicle:State of the Art and Future Challenges[J]. IEEE Access, 2020, 8:161211-161222.
[2] STANO P, MONTANARO U, TAVERNINI D, et al. Model Predictive Path Tracking Control for Automated Road Vehicles:a Review[J]. Annual Reviews in Control, 2023, 55:194-236.
[3] 梁忠超, 张欢, 赵晶, 等. 基于自适应MPC的无人驾驶车辆轨迹跟踪控制[J]. 东北大学学报(自然科学版), 2020, 41(6):835-840.
LIANG Zhongchao, ZHANG Huan, ZHAO Jing, et al. Autonomous Vehicle Trajectory Tracking Control Based on Adaptive MPC[J]. Journal of Northeastern University(Natural Science), 2020, 41(6):835-840.
[4] 王银, 张灏琦, 孙前来, 等. 基于自适应MPC算法的轨迹跟踪控制研究[J]. 计算机工程与应用, 2021, 57(14):251-258.
WANG Yin, ZHANG Haoqi, SUN Qianlai, et al. Researchon Trajectory Tracking Control Based on Adaptive MPC Algorithm[J]. Computer Engineering and Applications, 2021, 57(14):251-258.
[5] ZHANG Zhida, ZHENG Ling, LI Yinong, et al. Cooperative Strategy of Trajectory Tracking and Stability Control for 4WID Autonomous Vehicles under Extreme Conditions[J]. IEEE Transactions on Vehicular Technology, 2023, 72:3105-3118.
[6] 刘平, 刘自斌, 杨明亮, 等. 考虑道路曲率的多约束高速无人驾驶汽车横向跟踪控制方法[J]. 长安大学学报(自然科学版), 2023, 43(2):120-134.
LIU Ping, LIU Zibin, YANG Mingling, et al. Lateral Tracking Control Method for Multi-constraint High-speed Unmanned Vehicles Considering Road Curvature[J]. Journal of Changan University(Natural Science Edition) 2023, 43(2):120-134.
[7] GUO Jinghua, LUO Yugong, LI Keqiang, et al. Coordinated Path-following and Direct Yaw-moment Control of Autonomous Electric Vehicles with Sideslip Angle Estimation[J]. Mechanical Systems and Signal Processing, 2018, 105:183-199.
[8] YANG Taiping, LI Peiqing, LI Qipeng, et al. Vehicle Stability Control Strategy for High-speed Curves Based on Mode Switching[J]. Proceedings of the Institution of Mechanical Engineers Part D-Journal of Automobile Engineering, 2023, 18:1-18.
[9] 付林凯, 金智林. 自适应多种群遗传优化的SUV防侧翻控制方法[J]. 重庆理工大学学报(自然科学版), 2023, 37(6):39-47.
FU Linkai, JIN Zhilin. Adaptive Multi-population Genetic Optimization of SUV Anti-rollover Control Method[J]. Journal of Chongqing Institute of Technology, 2023, 37(6):39-47.
[10] JIA Fengjiao, JING Houhua, LIU Zhiyuan. A Novel Nonlinear Drift Control for Sharp Turn of Autonomous Vehicles[J]. Vehicle System Dynamics, 2023,62(2): 1-21.
[11] 蔡英凤, 李健, 孙晓强, 等. 智能汽车路径跟踪混合控制策略研究[J]. 中国机械工程, 2020, 31(3):289-298.
CAI Yingfeng, LI Jian, SUN Xiaoqiang, et al. Researchon Hybrid Control Strategy for Intelligent Vehicle Path Tracking[J]. China Mechanical Engineering 2020, 31(3):289-298.
[12] PRAKASH R, DHEER D K. Evolutionary Algorithms Based Model Predictive Control for Vehicle Lateral and Roll Motion Control[J]. Arabian Journal for Science and Engineering, 2023, 48:6857-6871.
[13] YUAN Tengfei, ZHAO Rongchen. LQR-MPC-based Trajectory-tracking Controller of Autonomous Vehicle Subject to Coupling Effects and Driving State Uncertainties[J]. Sensors, 2022, 22(15):5556.
[14] MIAO Yinan, WANG Xingjian, WANG Shaoping, et al. Adaptive Switching Control Based on Dynamic Zero-moment Point for Versatile Hip Exoskeleton under Hybrid Locomotion[J]. IEEE Transactions on Industrial Electronics, 2023, 70:11443-11452.
[15] 刘凯, 龚建伟, 陈舒平, 等. 高速无人驾驶车辆最优运动规划与控制的动力学建模分析[J]. 机械工程学报, 2018, 54(14):141-151.
LIU Kai, GONG Jianwei, CHEN Shuping, et al. Dynamic Modeling Analysis of Optimal Motion Planning and Control for High-speed Unmanned Vehicles[J]. Journal of Mechanical Engineering, 2018, 54(14):141-151.
[16] SINGH A S P, NISHIHARA O. Trajectory Tracking and Integrated Chassis Control for Obstacle Avoidance with Minimum Jerk[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23:4625-4641.
[17] 陈龙, 解云鹏, 蔡英凤, 等. 极限工况下无人驾驶车辆稳定跟踪控制[J]. 汽车工程,2020, 42(8):1016-1026.
CHEN Long, XIE Yunpeng, CAI Yingfeng, et al. Stable Tracking Control of Autonomous Vehicles at Extreme Conditions[J].Automotive Engineering, 2020,42(8):1016-1026.
[18] 刘溯奇, 王刚, 安伟彪, 等. 基于变预测时域的电动汽车轨迹跟踪控制[J]. 科学技术与工程, 2021, 21(17):7348-7354.
LIU Suqi, WANG Gang, AN Weibiao, et al. Electric Vehicle Trajectory Tracking Control Based on Variable Predictive Time Domain[J]. Science Technology and Engineering, 2021, 21(17):7348-7354.
[19] 李骏, 万文星, 郝三强, 等. 复杂路况下无人驾驶路径跟踪模型预测控制研究[J]. 汽车工程,2022, 44(05):664-674.
LI Jun, WAN Wenxing, HAO Sanqiang, et al. Research on Model Predictive Control of Autonomous Vehicle Path Tracking under Complex Road Condition[J]. Automotive Engineering, 2022,44(05):664-674.
[20] SUN Chuanyang, ZHANG Xin, ZHOU Quan, et al. A Model Predictive Controller with Switched Tracking Error for Autonomous Vehicle Path Tracking[J]. IEEE Access, 2019, 7:53103-53114.
(编辑 王艳丽)
作者简介:
张 玮,男,1999年生,硕士研究生。研究方向为无人驾驶汽车、路径规划与跟踪控制。E-mail:zhangwehkj@163.com。
高爱云(通信作者),女,1974年生,教授、博士。研究方向为混合动力汽车能量管理与协调控制、智能车辆动力学与控制。获省部级二、三等奖3项。发表论文60余篇。E-mail:gao_cloud@163.com。
