测量机器人在地铁变形监测中的应用研究
2024-07-01蔡少辉
摘要:为了更好地监测基坑水平位移,研发了一种基于自由设站的测量机器人,它能够在极端环境下准确监测桩顶水平位移,具有良好的准确性和灵活性。这种技术不仅可以在深基坑桩顶水平位移监测上得以体现,还可以在新建隧道的施工过程中,有效监测隧道道床的沉降、收敛和水平位移,为施工带来更加可靠的数据支撑。经过多次实验,发现测量机器人使用实时自动化监控技术能够给出准确信息,并且在很大程度上改善了建/构造物的三维变形检查。这种技术不仅为建设项目的安全提出了参考,而且也为其他领域的研究提出了新的思路。
关键词:测量机器人 自由设站 基坑桩顶水平位移 既有线
Research on the Application of Measurement Robots in the Deformation Monitoring of Subways
CAI Shaohui
(Nuclear Industry 216 Brigade,Urumqi, Xinjiang Uygur Autonomous Region,830011 China)
Abstract: In order to better monitor the horizontal displacement of foundation pits, this paper develops a measurement robot based on free stations which can accurately monitor the horizontal displacement of pile tops in the extreme environment with good accuracy and flexibility. This technology can not only be used in the monitoring of the horizontal displacement of the pile top of deep foundation pits, but also effectively monitor the settlement, convergence and horizontal displacement of the tunnel bed during the construction process of new tunnels, providing more reliable data support for construction. After multiple experiments, it is found that measuring robots can provide accurate information by real-time automated monitoring technology and greatly improve the three-dimensional deformation inspection of buildings/structures. This technology not only provides a reference for the safety of construction projects, but also provides new ideas for research on other fields.
Key Words: Measurement robot; Free station; Horizontal displacement of the pile top of foundation pits; Existing line
监测桩顶水平位移对于明挖基坑施工来说至关重要,但传统的视准线法和小角法已经无法满足城市地铁基坑施工所面临的复杂环境[1]。为了解决桩顶水平位移监测难题,利用现有的仪器设备,经过反复测量、数据分析比对,发现利用测量机器人自动照准功能,采用自由设站技术,监测数据最为稳定、精确。本文重点是使用徕卡机器人来监测乌鲁木齐市2号线一期工程中的明挖基坑和隧道。这种机器人可以更好地了解区域内地面上物体的位置,并且能够更准确地预测它们是否会发生偏斜。此外,这种机器还可以更好地检查和维护区域内地面上物体的稳定性。
1测量机器人工作原理与作业流程
1.1测量机器人
测量机器人是一种能代替人进行自动搜索、跟踪、辨识和精确照准目标并获取角度、距离、坐标等信息的智能型速测电子全站仪。它是在全站仪的基础上集成马达和CCD影像传感器等原件构成的视频成像系统,并配置智能化的控制测量及应用平差软件发展而形成的[2]。测量机器人通过CCD影像传感器等对目标进行识别,实现自我控制,并自动完成搜索、照准、读数等操作,已完全可以代替人来完成许多测量任务,尤其是人无法到达或触及的目标与区域。
1.2测量机器人工作原理
通过使用一台高精度的测量机器人和一套先进的极坐标测量技术,可以对物体进行精确的变形监控。
1.2.1强制观测基站
强制观测基站为测量机器人极坐标测量系统的起始点,用一个强制对准装置来架设测量机器人。
1.2.2参照点
参照点为后视照准点。该点的平面坐标为已知,点位应布设于变形影响区域外的稳固地带,一般布设于变形影响区域外的楼房等高大建筑物上。
1.2.3目标点
目标点是根据设计要求,设置在变形体上能够反映变形特征部位的目标。
1.3 测量机器人作业流程
(1)测量机器人的任务流程涵盖了多个方面,其中最重要的是:首先,完成工程项目的管理,以便对相关的技术参考资料进行准确的记录和数据分析;其次,完成系统的初始化,完成对各种参考资料的即时追踪和数据分析,并将结果予以实时可视化显示。(2)重新组织这句话:首先,需要开启系统,并确保它能够正确地完成后续任务。(3)调整机器人的参考标准,包括2C差异、指标差异、目标识别照准差[3]。(4)实施自动测量,即依照预定的监控策划,让机器人能够自动寻找目标,并定时予以观察。(5)完成后,需要将所有的数据经过精心的处理,以确保它们能够准确地反映出实际情况。通过对数据的投射和平差处理,可以获取到有关目标点的精确位置信息,从而为开展进一步研究奠定基础。此外,还可用于对相关报告和结构加以检索和统计。
2 地铁明挖基坑水平位移监测实例
2.1工程概况
乌鲁木齐市轨道交通2号线华山街站为一座明挖车站,车站主体结构采用明挖法,连接车站小里程端区间隧道采用暗挖法、车站大里程端区间隧道采用明挖法施工。
2.2基坑水平位移监测方案
2.2.1水平位移工作基点的布设
为了确保监测的准确性,根据工程的特点,必须在施工基坑开挖深度的2倍范围内建立3~4个联测基点,并在其周围设置强制对中观测墩和标志,以减少对中误差的影响,进而提升监测的精度。
2.2.2基坑监测点的布设
为了更准确地测量桩顶水平位移,将测点分布于每个桩顶。对整个基坑进行测量,并将测点分布于其两侧。每侧的测点之间的间隔为40 m。此外,还对基坑的阳角和重要区域进行加固[4],总计布置16个水平位移测点。通过安装一个固定的小棱镜,可以有效地降低监测点的偏移率,从而达到更准确的结果。
2.2.3测量机器人强制观测墩的布设
为了更好地监测工程的水平位移,在基坑周围布置了4个强制观测墩,每个墩至少有2个。由于该车站的长度较大,因此采取上述措施来确保能够完整地监测到所有的水平位移。
2.3监测的作业方法
经过严格的安装和调试,完成对所有工作位置和水平位移的监控。把测量机器人安装在了预先安排好的位置,使它能够按照要求正确移动,并对它的性能和能力进行评估,以便它能够更好地完成任务。为了确保地下建筑物的稳固,使用高精度的小型摄像头来进行标识和记录。在完成标识和记录之后,使用清华山维平差软件来确认每个标识和记录的位置。同时,对每个标识和记录进行投影,以获得与建筑物方向平行的矢量位移。最后,根据以上获得信息来评估建筑物的稳定性,为保证建筑物的安全提供依据[5]。
2.4基坑桩顶水平位移监测成果分析
为保证安全性,对地基的移动情况实行全面的监控[6]。首先,对移动情况进行详细检查,并保证它们处于稳定状态。如果发生了任何异常或外部条件发生了巨大的改变,将会增加对移动的检查频率,直到工程完工。经过对16个监测点的全面检查,发现其对地基的影响力较弱,其最大偏差仅有5.4 mm,低于预定的移动限额30 mm。
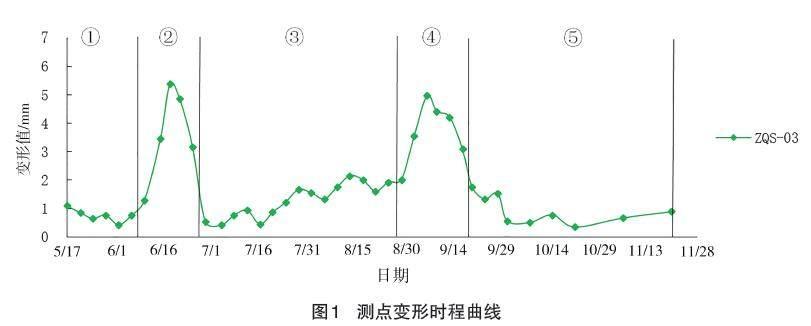
根据基坑特点及变形影响,选取基坑西侧影响较大区域ZQS-03监测点,绘制监测点变化的时程曲线图,监测点时程曲线如图1所示。
对于监测点受基坑开挖施工影响,分析监测点的变形规律,具体如下。
工况①:土方开挖初期,当开挖地表一下2 m位置时,架设第一道钢支撑,此时监测值比较稳定,最大变形为1.1 mm。
工况②:土方开挖至第二道钢支撑以下0.5 m(约-8 m),架设第二道钢支撑。在此段时间内测点变形速率有增大趋势,经分析基坑西侧为运输道路,渣土车辆及大型机械吊装作业造成西侧土体向基坑内偏移5.4 mm,此时该变形点碾压附近地表沉降点监测值变化不大。
工况③:周边荷载消除,第二道钢支撑架设完成后,调整预加轴力值,基坑变形发生回弹。
工况④:基坑开挖到底,底板混凝土浇筑。与工况②类似,浇筑底板过程中,因混凝土罐车引起基坑西侧向基坑内偏移。
工况⑤:底板浇筑带来的偏载消失后,与工况④类似,变形发生一定量的回弹。随着钢支撑拆除,边墙结构施工,中板及顶板钢筋绑扎,变形趋于稳定。
3地铁隧道下穿既有线监测实例
3.1工程概况
2号线二期的乌鲁木齐市机场改造计划,将以国际机场站作为开端,沿着机场第一跑道向西延伸,最终抵达T4航站楼站。这条新的航班线路将继续沿着原来的轨道交通系统,使乌鲁木齐机场更加便捷、安全。这个区域的结构特点是使用了马蹄型断面。这条隧道的拱门处的高度在32~35 m之间,所经过的地层大多是卵石,而且属于V级。
3.2监测内容及要求
为确保地铁系统的稳健性和可靠性,使用先进的测量技术来检查和评估在隧道下方的情况。这些技术能够更准确、更快速地发现和识别可能存在的问题,并及时采取必要的补救和修复措施。这样才能确保系统能够在最短的时间内恢复原状,并且能够确保系统顺利完成工作。为了确保新建的隧道的安全[7],将会对其进行详细的检查和评估,以便提供有效的指引。
3.3监测方案
根据《城市地上地下工程建设风险管理技术规范》的规定,对现存的隧道结构的检查应当采取分步实施的措施:首先,在线路的两侧分别安装监测点,以便检查其水平位移;其次,在结构沉降、隧道收缩和水平位移的位置,也分别安装监测点;最后,在道床上安装监测点。
3.4监测方法
通过使用先进的技术,可以对线道床的下降、收敛和水平位移实行智能化监控。这个监测系统包括了多个部分,如基准点、工作基点、变形点、全站仪和控制中心[8]。(1)基准点、工作基点:为了确保精度,还建立了3个或更多的稳定的基准点。(2)变形点:通常需要放置3个或更多的基准测量点,这些测试点都要求具备足够的视觉和力学性能,并且要求具备良好的角度和方向监测能力。(3)全站仪:采用徕卡TS15测试机器人,测距精度为1 mm+1.5 mm×10-6×D(D为边长,单位:km)。(4)计算机机房:在计算机室,使用了一条高速的通信线路,将所有的计算机连接到了一个高精度的传感器系统,以便对整个系统的运行状态提供实时监测[9]。
3.5成果分析
经过统计分析,国际机场站至T4航站楼站区间(现存1号线)的各项监测点变形量均处于-4~4 mm范围内,且变形速率保持稳定,风险可控。
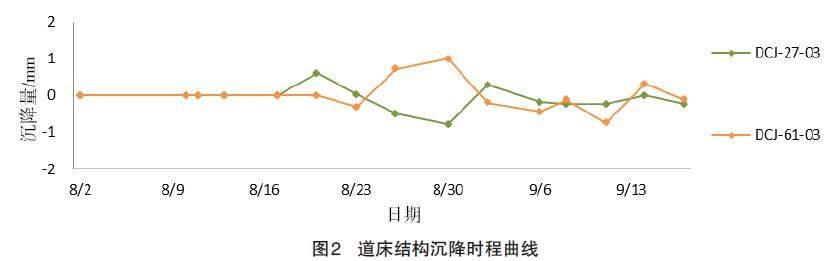
3.5.1道床结构沉降
通过对道床结构的沉降监测,发现了一些明显的变形,其中最严重的变形点,如图2所示。但从变形曲线图来看,这些沉降量都很低,符合了相关规范的要求。
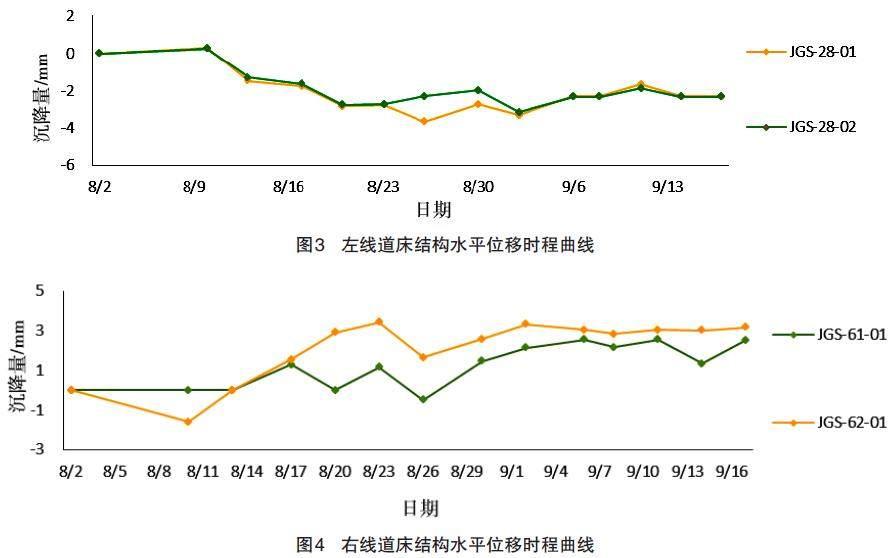
3.5.2道床水平位移
通过对道床结构的水平位移进行监测,发现左右两条线的变形量都小于控制值±10 mm,并且变化趋势相当稳定,如图3、图4所示。
3.5.3隧道收敛变形
根据监测结果,隧道下穿既有1号线隧道时,其变形量介于-1~2 mm之间,低于规范要求的±10 mm,如图5所示。说明施工对隧道的影响较小,属于正常变形情况。
经过全面的监控,发现当隧道横跨现存铁路干线时,它所造成的沉降、水平位移、结构收缩等问题几乎没有受到任何影响,其累积变形量与变化频率都符合相关标准,因此它并未给现存铁路的正常使用带来任何负面影响。
4 结语
(1)通过安装具有高效率的测量机器人,并配备具有高性能的传感器,能够有效地抑制仪器与目标之间的偏差。此外,利用具有高性能的传感器,还能够实现多次重复的自动校正,进而大大降低人员动作的错误,保证监控的准确性。
(2)由于施工过程中的动荷载作用,基坑桩顶水平位移发生了显著的变形,但在荷载消除之后,这种变形会出现一定的回弹。因此,应采取措施尽可能地减少坑边堆载对基坑安全的不利影响。
(3)通过采用测量机器人自由设站技术,可以实现对复杂外形的建筑物三维变形的快速、准确的监测,这种技术不仅适用于已有的隧道,而且还可以拓展到更多的领域。
参考文献
- 张建坤,王智,谷冰峰,等.GNSS技术在基坑水平位移监测中的应用研究[J].工程勘察,2016,44(10):61-65.
- 高爱林,许文学,蔡军.全站仪自由设站法在地铁基坑水平位移监测中的应用[J].都市快轨交通,2013,26(5):93-96.
- 梅文胜,张正禄,黄全义.测量机器人在变形监测中的应用研究[J].大坝与安全,2012(5):33-35.
- 张爱国.地下立体交通工程桩-撑体系深基坑监测浅析[J].甘肃科技,2018,34(19):122-124.
- 蔡少辉,唐强,张映宁. TS15测量机器人在地铁基坑水平位移监测中的应用[J].科技资讯,2023,21(6):1-6.
- 何勇.自由测站边角交会法在地铁基坑水平位移变形监测中的应用[J].运输经理世界, 2022(13):1-3.
- 李雪,陈霖,赵卫星,等.暗挖隧道下穿既有地铁线路变形控制对比研究[J].建筑结构, 2023,53 (S2):2709-2714.
- 蔡少辉.地铁隧道下穿既有线风险监测分析[J].中国新技术新产品,2022(23):90-92.
- 蔡少辉.测量机器人自由设站技术在地铁施工风险监测中的应用[J].铀矿地质,2023, 39(4):673-680.
