基于模糊PID的串级温度控制系统研究
2024-07-01贺成杰蔡天赐邹洪武王党旗马德营
贺成杰 蔡天赐 邹洪武 王党旗 马德营
基金项目:“十三五”全军共用信息系统装备专用技术预先研究项目(31512080305)
摘要:鉴于过热汽温具有大迟延、大惯性和时变等特点,用常规的PID串级来控制过热汽温很难满足生产要求。因此,在PID串级控制系统中引入模糊控制,使得过热汽温系统的控制品质大幅提高。结果表明,与常规的PID串级控制系统相比,模糊PID串级控制系统在调节时间和超调量等方面改善效果显著。
关键词:模糊控制;PID串级控制;过热汽温;控制品质
中图分类号:TP273+.4 文献标志码:A 文章编号:1671-0797(2024)12-0046-03
DOI:10.19514/j.cnki.cn32-1628/tm.2024.12.012
0 引言
当前PID控制仍然是控制过热汽温的主流方法。基于过热汽温大迟延、大惯性和时变等特点,当运行工况发生较大变化时,其对过热汽温对象的模型参数有较大影响。因此,常规的PID控制难以取得令人满意的控制效果[1]。
针对以上问题,本文提出一种新的过热汽温系统的控制方案:将模糊控制器和常规的PID控制器相结合作为主控制器。结果表明,新的控制方案较传统的PID控制方案有更好的控制品质,即使在变工况的条件下也能达到较好的控制效果。
1 串级控制系统的设计
1.1 过热汽温串级控制系统
过热汽温采用串级PID控制的原理框图如图1所示。
某机组锅炉过热汽温采用喷水减温调节手段,控制系统的被控对象为一个带有大迟延和大惯性的非线性控制对象。通过现场动态特性试验得知:随运行工况的不同,对象动态特性会发生较大范围的变化。具体变化情况如表1所示。
衰减曲线法是一种闭环整定方法,整定的依据是在纯比例调节下的试验数据,其试验数据来自系统的衰减振荡,且衰减比特定(通常为4:1或10:1,本文为4:1),利用表2的经验公式,求取调节器相应的整定参数。
在衰减比4:1下分别调节主副回路:根据表2衰减曲线法整定计算公式,结合表1四种典型工况下的对象特性,计算出四种典型工况下的主控制器整定参数如表3所示。
当运行工况大幅度变动时(即37%~100%负荷范围内),过热汽温对象的非线性、时变性非常明显:根据某一特定工况得到的PID控制器整定参数,在各种工况下很难实现较为理想的控制效果;不同工况的过热汽温对象的数学模型参数变化也很大。
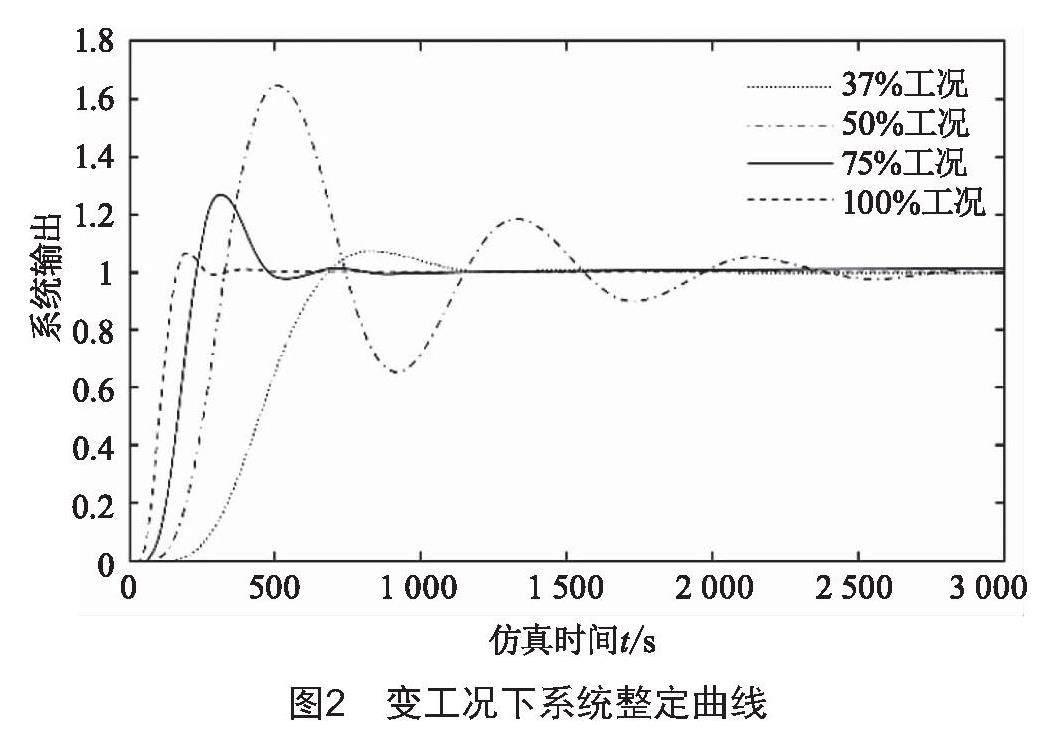
以75%工况为例,根据表3中的参数,在Matlab中仿真得到各工况下的曲线如图2所示。
由图2分析比较可知,在变工况情况下,系统负荷由75%下降到50%时,系统超调量增大,调节时间变长;在系统负荷由75%上升到100%的过程中,系统反应变慢,积分作用表现得越来越弱,调节时间也略微增长。虽然系统以75%工况下整定的参数为基准升降负荷时最终会趋于稳定,但其控制效果已经变得越来越差。
因此,下文引入了模糊PID串级汽温控制策略,以改善过热汽温的控制品质。
1.2 串级控制系统的改进——模糊PID串级控制系统
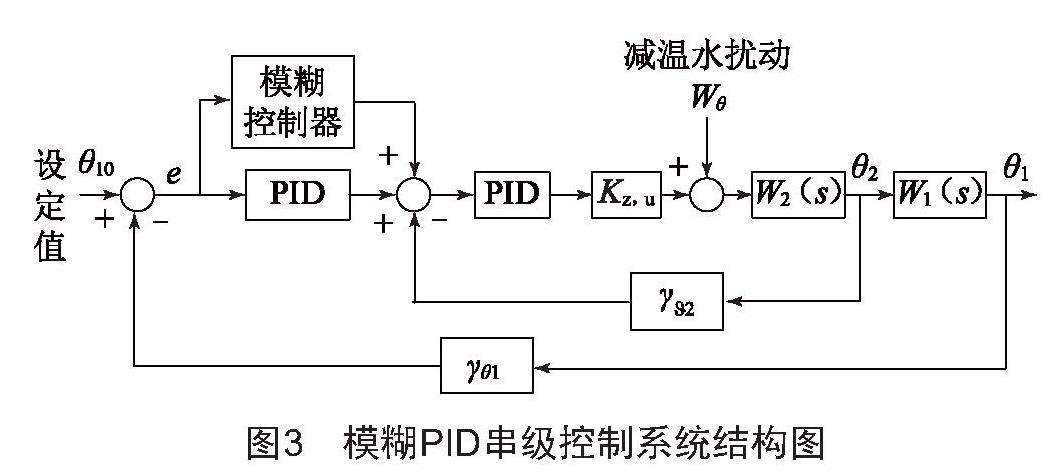
针对过热汽温被控对象的特性,本文采用模糊PID控制器作为过热汽温串级控制系统的主调节器,以改善过热汽温被控对象在锅炉负荷发生变化等情况下的动态性能。其控制系统结构图如图3所示。
当过热汽温被控对象受到如锅炉负荷变化等因素影响时,过热汽温测量值θ1与设定值θ10相差较大,模糊PID控制器将kp、ki和kd三个参数根据误差e和误差变化率ec进行调整,进而改变了模糊整定控制器输出信号,最终使得过热汽温保持在额定值[2]。
2 模糊PID串级控制系统的设计
2.1 模糊控制器隶属函数曲线的设置
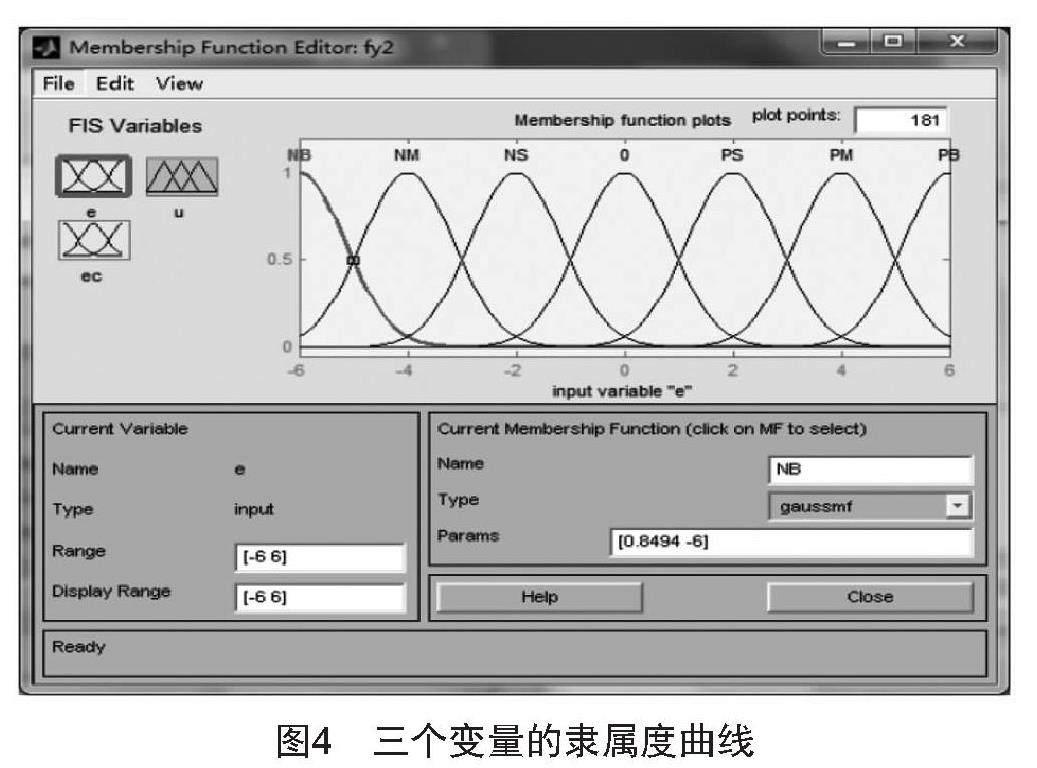
模糊控制器采用双输入单输出的二维结构,输入分别为误差e和误差的变化率ec,输出为u。其模糊集为:{NB,NM,NS,Z0,PS,PM,PB}。模糊控制器的隶属函数曲线均采用反应较为灵敏的三角形函数,论域均为[-6,6],三个变量的隶属度曲线相同,如图4所示。
2.2 模糊控制器规则的设计
模糊控制规则是根据生产现场操作人员或者专家经验得到的。规则表反映了实际的操作经验,规则表的好坏直接决定了控制的品质。模糊控制规则是否完备,直接决定着模糊控制效果的好坏。它的提取和选择是一个复杂综合的过程[3-4]。本文选取常用的模糊控制规则,如表4所示。
2.3 模糊PID串级控制系统仿真及参数整定
由于模糊控制器的输入为误差和误差的变化率,故模糊控制器可以等同为一个PD控制器。从控制性能分析可知PD控制器是有差控制器,无法消除静差。为了得到一个误差输出曲线,需要在模糊控制器上并联一个积分控制器,即得到模糊PID控制器。系统采用串级结构,内回路为比例调节,外回路由模糊控制器和常规PID并联组成混合控制器[5-7]。仿真结构图如图5所示。
以75%工况为例,采用模糊PID控制系统在Matlab中仿真得到各工况下的曲线如图6所示。
3 结论
针对过热汽温被控对象大迟延、大惯性和时变等特点,本文在常规的过热汽温串级控制系统的基础上,引入模糊PID控制器作为串级控制系统的主调节器,用Matlab对该模糊PID串级控制系统进行了仿真。结果表明,与常规的串级控制系统相比,模糊PID串级控制系统对象的参数或结构发生变化时,有快速响应、无超调、无静差等优良性能。
[参考文献]
[1] 李佳.模糊自整定PID控制在过热汽温控制系统中的研究与应用[D].哈尔滨:哈尔滨理工大学,2012.
[2] 曾竞,谢又成.基于模糊自整定PID的主汽温串级控制系统的设计[J].微计算机信息,2007(19):46-48.
[3] 王伟,赵晔,宋光明,等.基于模糊控制的混合储能功率优化分配研究[J].机电信息,2023(23):7-10.
[4] 方康玲.过程控制系统[M].2版.武汉:武汉理工大学出版社,2013.
[5] 韦巍,何衍.智能控制基础[M].北京:清华大学出版社,2008.
[6] 任翔宇,裴旭东.基于模糊PI控制的光伏并网系统电能质量提升研究[J].机电信息,2023(15):19-21.
[7] 马占有,田俊忠,马泽玲.温度控制系统模糊自适应PID控制器仿真研究[J].计算机仿真,2010,27(10):160-163.
收稿日期:2024-03-04
作者简介:贺成杰(1989—),男,山西应县人,硕士,工程师,技师,研究方向:智能控制及过程装备设计。
